交流伺服系统的鲁棒性研究
- 格式:pdf
- 大小:308.37 KB
- 文档页数:4
交流伺服电机速度与位置环的一体化鲁棒控制0.引言在工业加工和装配生产线中,为提高生产效率和产品质量,机器设备的运动部件需要快速平稳且准确地进入预定的目标区域。
控制系统在其中发挥了关键的作用。
永磁同步电机(PMSM:Permanent Magnet Synchronous Motor)由于功率密度高、结构简单可靠等优点,在工业伺服系统中得到了广泛的应用[]。
常规的PMSM伺服系统采用基于PID的多环串级控制的结构。
PID的特点是简单易用,但它是一种单自由度的线性控制【2】,不能同时实现快速响应与低超调,且易产生积分器饱和(Windup)现象。
PID控制系统的瞬态性能对给定输入和扰动的变化缺乏鲁棒性,实际应用中需引入非线性增益【3】、抗饱和等措施【4-5】。
文【6】把自抗扰控制(ADRC:Auto Disturbance Rejection Control)应用于电机伺服系统,其中利用非线性扩展状态观测器来提取扰动信号并加以补偿,采用非线性PID控制律来改善系统响应性能,但ADRC控制律的参数众多,且与系统性能的关系并不明朗,参数的整定非常麻烦。
本文针对PMSM伺服系统的模型特点和性能需求,提出一种基于线性扩展观测器的扰动补偿复合控制的离散域设计方案。
在矢量控制的模式下,把电机的速度和位置环构成的机械子系统作为受控系统,分别以转矩电流和电机转角作为控制输入和受控输出量,在仅有转角可量测(如采用增量式光电编码器)的条件下,设计一个线性扩展状态观测器来估计系统的转速和未知扰动(包括不确定性和负载转矩等因素),并用于反馈和补偿,最终实现平稳和准确的位置控制。
本文的设计是基于离散时间域的,而常规的设计往往是在连续时间域,其设计的控制器最终必须经过离散化后才能在实际系统上实现,这种模拟化设计通常要求一个30倍于闭环带宽的离散采样频率,否则实际控制性能将出现较大的偏差,从而增加了设计和调试的工作量。
由于数字化控制是大势所趋,在离散时间域上直接设计出数字控制器是一个更合理的选择。
机床网络分布式伺服系统的稳定性与鲁棒性分析与优化策略摘要:机床是现代制造业中关键的工具,而网络分布式伺服系统的稳定性与鲁棒性对机床性能的影响至关重要。
本文旨在分析机床网络分布式伺服系统的稳定性与鲁棒性,并提出相应的优化策略。
首先介绍了机床网络分布式伺服系统的基本原理和结构,并分析了系统中可能存在的稳定性和鲁棒性问题。
接着,通过数学建模和仿真实验,对机床网络分布式伺服系统的稳定性和鲁棒性进行了详细分析。
最后,提出了一些优化策略,如控制算法优化、故障诊断与容错措施等,以提高机床网络分布式伺服系统的稳定性和鲁棒性。
1. 引言机床网络分布式伺服系统是由多个伺服节点组成,并通过网络进行通信和控制的一种先进控制系统。
该系统架构具有分布式、协作和实时性强的特点。
然而,由于网络通信延迟、信号干扰、节点故障等因素的存在,机床网络分布式伺服系统的稳定性和鲁棒性面临一些挑战。
因此,对该系统的稳定性和鲁棒性进行分析与优化具有重要意义。
2. 机床网络分布式伺服系统的稳定性分析机床网络分布式伺服系统稳定性是指系统在一定工作条件下是否能保持稳定的运行状态。
在稳定性分析中,需要考虑网络通信延迟对系统响应的影响、节点之间的通信协议、控制算法的选择等因素。
通过数学建模和仿真实验,可以得到系统的传输函数和稳定域,进而评估系统的稳定性。
另外,还需考虑系统中可能出现的饱和效应、奇异性问题等,并采取适当的措施进行补偿或优化。
3. 机床网络分布式伺服系统的鲁棒性分析机床网络分布式伺服系统的鲁棒性是指系统对于外部扰动和不确定性的抵抗能力。
在鲁棒性分析中,需要考虑节点之间通信的可靠性、节点故障的容错机制、外部干扰对系统性能的影响等因素。
通过故障诊断和容错措施,可以提高系统的鲁棒性。
此外,还需采用适当的控制算法和滤波器,以降低系统对于噪声和干扰的敏感性,提高系统的鲁棒性。
4. 机床网络分布式伺服系统的优化策略为了提高机床网络分布式伺服系统的稳定性和鲁棒性,可以采取一系列优化策略。
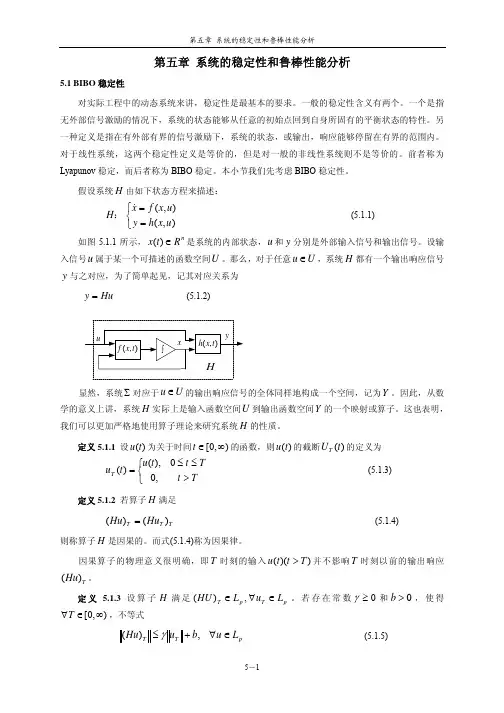
第五章 系统的稳定性和鲁棒性能分析5.1 BIBO 稳定性对实际工程中的动态系统来讲,稳定性是最基本的要求。
一般的稳定性含义有两个。
一个是指无外部信号激励的情况下,系统的状态能够从任意的初始点回到自身所固有的平衡状态的特性。
另一种定义是指在有外部有界的信号激励下,系统的状态,或输出,响应能够停留在有界的范围内。
对于线性系统,这两个稳定性定义是等价的,但是对一般的非线性系统则不是等价的。
前者称为Lyapunov 稳定,而后者称为BIBO 稳定。
本小节我们先考虑BIBO 稳定性。
假设系统H 由如下状态方程来描述: (5.1.1)⎩⎨⎧==),(),(u x h y u x f xH &:如图5.1.1所示,是系统的内部状态,u 和分别是外部输入信号和输出信号。
设输入信号u 属于某一个可描述的函数空间U 。
那么,对于任意nR t x ∈)(y U u ∈,系统H 都有一个输出响应信号y 与之对应,为了简单起见,记其对应关系为(5.1.2)Hu y =显然,系统Σ对应于的输出响应信号的全体同样地构成一个空间,记为Y 。
因此,从数学的意义上讲,系统U u ∈H 实际上是输入函数空间U 到输出函数空间的一个映射或算子。
这也表明,我们可以更加严格地使用算子理论来研究系统Y H 的性质。
定义5.1.1 设为关于时间)(t u ),0[∞∈t 的函数,则的截断的定义为 )(t u )(t U T (5.1.3)⎩⎨⎧>≤≤=T t Tt t u t u T ,00),()(定义5.1.2 若算子H 满足(5.1.4) T T T Hu Hu )()(=则称算子H 是因果的。
而式(5.1.4)称为因果律。
因果算子的物理意义很明确,即T 时刻的输入并不影响))((T t t u >T 时刻以前的输出响应。
T Hu )(定义 5.1.3 设算子H 满足p T p T L u L HU ∈∀∈,)(。

数控机床直线电机进给伺服系统的动态特性分析与研究1. 数控机床直线电机进给伺服系统概述随着科技的不断发展,数控机床在工业生产中扮演着越来越重要的角色。
为了提高数控机床的加工精度和效率,近年多的研究者开始关注直线电机进给伺服系统的研究与应用。
直线电机进给伺服系统是一种采用直线电机作为驱动源的高精度、高速度、高可靠性的伺服系统,广泛应用于数控机床、机器人、自动化生产线等领域。
直线电机进给伺服系统具有很多优点,如结构简单、体积小、重量轻、响应速度快、转矩大等。
这些优点使得直线电机进给伺服系统在数控机床中的应用越来越广泛。
由于直线电机本身的特点以及伺服系统的复杂性,对其进行动态特性分析与研究具有很大的挑战性。
本文将对数控机床直线电机进给伺服系统的动态特性进行深入研究,以期为实际应用提供理论依据和技术支撑。
1.1 研究背景随着现代制造业的快速发展,数控机床在各个领域的应用越来越广泛。
数控机床的性能和精度对于提高产品质量、降低生产成本具有重要意义。
直线电机进给伺服系统作为数控机床的关键部件之一,其动态特性直接影响到数控机床的加工精度、速度和稳定性。
研究数控机床直线电机进给伺服系统的动态特性,对于提高数控机床的整体性能具有重要的现实意义。
传统的数控机床进给伺服系统主要采用步进电机驱动,虽然在一定程度上满足了加工需求,但其动态特性较差,如速度响应慢、加速度范围窄、负载能力有限等。
这些问题限制了数控机床在高速、高精度加工方面的应用。
随着直线电机技术的不断发展,直线电机进给伺服系统逐渐成为数控机床领域的研究热点。
直线电机具有功率密度高、加速度响应快、速度快、转矩大等优点,可以有效提高数控机床的性能。
由于直线电机进给伺服系统涉及到多个学科领域,如电机学、控制理论、机械设计等,因此对其动态特性的研究具有较高的难度。
本论文旨在对数控机床直线电机进给伺服系统的动态特性进行分析与研究,以期为提高数控机床的性能和稳定性提供理论依据。
《电液伺服力控系统的鲁棒迭代学习控制方法研究》篇一一、引言随着现代工业自动化水平的不断提高,电液伺服力控系统在各个领域的应用越来越广泛。
然而,由于系统本身的复杂性和外部环境的干扰,电液伺服力控系统的控制精度和稳定性成为了研究的重要课题。
本文将重点研究电液伺服力控系统的鲁棒迭代学习控制方法,以提高系统的控制性能和稳定性。
二、电液伺服力控系统概述电液伺服力控系统是一种基于液压传动和电气控制的力控制系统,具有高精度、高动态响应和高稳定性的特点。
然而,由于系统受到外部干扰、模型不确定性以及系统非线性等因素的影响,其控制性能和稳定性常常受到挑战。
因此,研究有效的控制方法对于提高电液伺服力控系统的性能具有重要意义。
三、鲁棒迭代学习控制方法针对电液伺服力控系统的特点,本文提出了一种鲁棒迭代学习控制方法。
该方法结合了鲁棒控制和迭代学习的优点,能够在系统受到外部干扰和模型不确定性时,通过迭代学习的方式逐步优化控制策略,提高系统的控制性能和稳定性。
具体而言,鲁棒迭代学习控制方法包括以下步骤:1. 建立电液伺服力控系统的数学模型,包括系统动力学模型、干扰模型和模型不确定性等。
2. 设计鲁棒控制器,以应对系统受到的外部干扰和模型不确定性。
鲁棒控制器能够根据系统的实时状态调整控制策略,保证系统的稳定性。
3. 引入迭代学习的思想,通过多次迭代学习逐步优化控制策略。
在每次迭代中,系统根据实际输出与期望输出之间的误差,调整控制策略,使系统逐渐逼近理想状态。
4. 结合鲁棒控制和迭代学习的优点,形成鲁棒迭代学习控制器。
该控制器能够在系统受到外部干扰和模型不确定性时,通过迭代学习的方式逐步优化控制策略,提高系统的控制性能和稳定性。
四、实验验证与分析为了验证本文提出的鲁棒迭代学习控制方法的有效性,我们进行了实验验证和分析。
实验结果表明,与传统的控制方法相比,鲁棒迭代学习控制方法能够更好地应对系统受到的外部干扰和模型不确定性,具有更高的控制精度和稳定性。
动力学控制系统中的鲁棒性研究1. 引言动力学控制系统广泛应用于机器人、飞机、汽车等自动化系统中。
这类系统具有参数变化和扰动等不确定性,对系统的控制产生了挑战。
因此,在动力学控制系统中鲁棒性研究是一个重要的研究领域。
本文将介绍动力学控制系统中的鲁棒性研究。
2. 动力学控制系统动力学控制系统是由动力学方程描述的系统,其基本形式为:$$\dot{x} = f(x,u)$$其中,$x$表示系统状态变量,$u$表示控制输入,$f(x,u)$表示状态变化率。
动力学控制系统具有高度的非线性性和复杂性,例如:机器人、汽车、飞行器等。
3. 鲁棒性概述鲁棒性是指系统对于未知扰动和参数变化具有稳定性和可控性。
鲁棒性的研究是一个重要的和实用的工程问题。
在动力学控制系统中,鲁棒性是在模型不确定性下对系统进行控制的能力。
4. 鲁棒控制方法4.1 鲁棒控制定义鲁棒控制是一种保持系统稳定和满足性能要求的控制方法,即使在不确定和随机环境下也能确保系统的可控性和可观性。
4.2 鲁棒控制常见方法(1) $H_\infty$ 控制:是一种常用的鲁棒控制方法,可处理具有有限频率和无限频率不确定性的系统。
(2) $μ$ 合成控制:该方法将控制器设计与系统不确定性和性能要求明确联系起来,使得控制器能够提供所需要的鲁棒性和性能。
(3) 自适应鲁棒控制:是一种能够应对不确定性的变化来保持系统稳定的控制方法。
5. 鲁棒控制在动力学控制系统中的应用动力学控制系统是复杂的、非线性的,具有较大的不确定性和非线性因素。
在该系统中,鲁棒控制方法是一种重要的研究方向。
5.1 $H_\infty$ 鲁棒控制在动力学控制系统中的应用$H_\infty$ 鲁棒控制方法广泛应用于动力学控制系统中,其目的在于设计一个控制器,使得系统的输出稳定,且被控制器产生的鲁棒性最大化。
5.2 自适应鲁棒控制在动力学控制系统中的应用自适应鲁棒控制是另一种在动力学控制系统中广泛应用的方法。
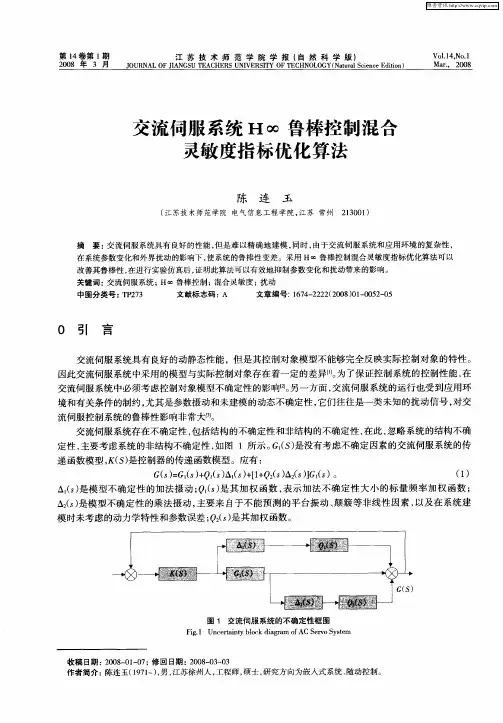
交流伺服系统的鲁棒性研究*王 蕊(华南理工大学广州汽车学院,广东广州 510800)摘 要:干扰是影响系统性能的主要因素,利用干扰观测器可对交流伺服系统中由负载改变、工作环境变化和建模误差等产生的干扰进行补偿。
工作时先在线辨识出系统的模型参数,将干扰观测器的名义模型自动调整为辨识值,再进行所需的控制。
研究结果表明,采用干扰观测器结合模型参数在线辨识的交流伺服系统具有较强的鲁棒性。
关键词:交流伺服系统;干扰观测器;在线辨识;鲁棒性中图分类号:TM34 文献标识码:A 文章编号:1006-4414(2011)02-0013-04St udy on t he robust ness of the AC servo syste mW ang Ru i(Guangzhou auto co llege,Sout h Ch i na uni ver sity of technology,Guangzhou Guangdong 510800,China)Abstrac t:The dist urbance is the m ain factor wh ich i n fluences t he perfor m ance o f t he syste m,and a d i sturbance observer is used to co m pensa te the d i sturbance generated by t he var i ation i n load,the change i n operati on conditi on and structure uncer ta i nty i n modeli ng i n t he AC se rvo syste m.T he m ode l param eters of t he servo syste m are on li ne i dentified first,and t he no m i nal model o f the d isturbance observ er is m od ifi ed to t he i dentificati on va l ues.The research proves that the A C po siti on se rvo syste m adopted by the d i sturbance observer and the para m eter on li ne i dentifica ti on sche m e can prov i de strong robustness t o t he para m eter var i a tion.K ey word s:AC servo syste m;d isturbance observ er;onli ne identifi cation;robustness1 引 言交流位置伺服系统广泛应用于工业控制中,由负载改变、工作环境变化和建模误差等产生的干扰是影响系统性能的主要因素。
投稿栏目:论文辐照改性制备长支链型高熔体强度聚丙烯(HMSPP)流变性能的研究:I 剪切流变*汪永斌,杨锐,张丽叶*(北京化工大学材料科学与工程学院,北京市新型高分子材料制备与加工重点实验室,北京100029)摘要通过辐照法制备了长支链型高熔体强度聚丙烯(HMSPP),采用动态剪切流变的方法表征了该HMSPP的熔体粘弹性,采用毛细管流变仪研究了该HMSPP的剪切流变行为,讨论了敏化剂含量、高分子量物质对PP熔体粘弹性、流动曲线和流动活化能的影响。
动态剪切流变数据表明:辐照改性能有效提高PP的熔体弹性,并且PP的熔体弹性随敏化剂含量的增加而显著增强,表现在低频端PP的动态储能模量(G’)随敏化剂含量的增加而提高,内耗正切tanδ变小,零切粘度η0增大,特征松弛时间τ0变长;辐照过程中添加极少量超高分子量聚乙烯(UHMWPE)也可提高PP的熔体弹性。
毛细管剪切流变测试表明:线性PP和长支链PP的流动曲线非常相似,辐照改性后PP的粘流活化能有了明显提高。
关键词高熔体强度聚丙(HMSPP);辐照;长支化;剪切流变;动态流变长支链型高熔体强度聚丙烯(HMSPP)是一种具备较好熔体弹性,较高熔体强度、微凝胶含量的PP树脂,它克服了普通线性PP“应变软化”的缺陷,可以在较宽的温度范围内表现出较高的熔体强度,有利于挤出发泡、高速涂布、中空成型等加工工艺[1]。
长支链型HMSPP加工性能优越,应用广泛,因此其研制和表征的研究倍受国内外工作者关注,目前主要的制备方法有定向聚合[2]、高能辐照[3][4]、反应挤出[5][6]等。
长支链结构对聚合物的流变性能有较大影响[7~9],主要表现在:(1)长支链可显著提高聚合物的熔体弹性[7],表现为第一法向应力、储能模量、出口膨胀增大以及抗熔垂能力的增强;(2)长支链可使聚合物具备明显“应变硬化”的拉伸流变特征[8]。
(3)长支链可提高聚合物的粘流活化能[9]。
因此,借助动态流变的方法可有效表征长支链型聚合物的熔体粘弹性,计算聚合物的分子量及分子量分布[10][11];并研究长支链分子的支链点密度、支链长度等链结构信息[12][13]。
《永磁同步电机鲁棒控制及故障识别研究》篇一一、引言随着现代工业的快速发展,永磁同步电机(PMSM)因其高效率、高功率密度和良好的调速性能,在工业生产、交通运输、航空航天等领域得到了广泛应用。
然而,要实现PMSM的稳定、高效运行,其控制策略和故障识别技术显得尤为重要。
本文旨在研究PMSM的鲁棒控制及故障识别技术,以提高PMSM的运行性能和可靠性。
二、永磁同步电机鲁棒控制研究1. 鲁棒控制理论基础鲁棒控制是一种基于系统不确定性的控制策略,能够在系统参数变化或受到外部干扰时,保持系统的稳定性和性能。
在PMSM中,鲁棒控制通过优化控制算法,提高电机的动态响应和稳态精度。
2. 鲁棒控制策略本文研究的鲁棒控制策略主要包括滑模控制、模型预测控制等。
这些控制策略能够根据电机运行状态和外界环境变化,实时调整电机控制参数,使电机在不同工况下都能保持较高的运行性能。
三、永磁同步电机故障识别研究1. 故障类型及识别方法PMSM的常见故障包括绕组短路、开路、转子位置检测错误等。
针对这些故障,本文研究了基于电流分析、电压分析、温度检测等故障识别方法。
这些方法能够实时监测电机运行状态,发现潜在故障并及早预警。
2. 故障诊断系统设计为了实现故障的快速诊断和准确识别,本文设计了一种基于多传感器信息融合的故障诊断系统。
该系统能够综合利用电流、电压、温度等多种传感器信息,对电机进行全方位的监测和诊断。
四、实验与结果分析为了验证本文所提的鲁棒控制和故障识别技术的有效性,进行了大量实验。
实验结果表明,采用鲁棒控制策略的PMSM在受到参数变化和外部干扰时,能够快速恢复稳定状态,提高电机的动态响应和稳态精度。
同时,所设计的故障诊断系统能够准确识别出电机故障类型和位置,为故障排除提供了有力支持。
五、结论与展望本文对永磁同步电机的鲁棒控制和故障识别技术进行了深入研究。
通过优化控制策略和设计故障诊断系统,提高了PMSM的运行性能和可靠性。
然而,随着工业领域的不断发展,PMSM的控制和故障识别技术仍需进一步研究和改进。
《电液伺服力控系统的鲁棒迭代学习控制方法研究》一、引言电液伺服力控系统是现代工业控制领域中一种重要的控制技术,其具有高精度、高效率以及良好的响应特性。
然而,由于系统受到外部干扰和模型不确定性等因素的影响,系统的控制性能常常受到影响。
因此,为了改善系统的性能,研究并设计有效的控制方法成为了一项重要任务。
本文旨在研究电液伺服力控系统的鲁棒迭代学习控制方法,以提高系统的控制精度和稳定性。
二、电液伺服力控系统概述电液伺服力控系统主要由伺服电机、液压装置和控制系统等部分组成。
其工作原理是通过控制系统对伺服电机进行控制,进而驱动液压装置进行力控制。
由于系统具有高度的非线性和时变性,因此需要设计一种有效的控制方法来提高系统的性能。
三、传统控制方法及其局限性传统的电液伺服力控系统控制方法主要包括PID控制、模糊控制等。
这些方法在一定的条件下可以取得较好的控制效果,但在面对模型不确定性、外部干扰等复杂情况时,其控制性能会受到较大影响。
因此,需要研究更为先进的控制方法来提高系统的鲁棒性和适应性。
四、鲁棒迭代学习控制方法针对传统控制方法的局限性,本文提出了一种鲁棒迭代学习控制方法。
该方法结合了迭代学习和鲁棒控制的思想,通过不断迭代和优化来提高系统的控制性能。
具体而言,该方法首先通过对系统进行建模和分析,确定系统的状态空间描述;然后设计一种迭代学习控制器,通过多次迭代来逐步减小系统的误差;最后采用鲁棒控制技术来提高系统对外部干扰和模型不确定性的抵抗能力。
五、方法实现与实验验证(一)方法实现在实现过程中,首先需要根据系统的特性和需求来设计迭代学习控制器。
然后,通过多次迭代来逐步减小系统的误差,并根据实际运行情况对控制器进行优化和调整。
最后,采用鲁棒控制技术来提高系统对外部干扰和模型不确定性的抵抗能力。
(二)实验验证为了验证本文提出的鲁棒迭代学习控制方法的有效性,我们进行了实验验证。
实验结果表明,相比传统的控制方法,该方法能够更好地提高电液伺服力控系统的控制精度和稳定性。
电机的鲁棒控制技术研究引言在工业自动化控制系统中,电机的鲁棒控制技术是一个重要的研究方向。
鲁棒控制技术可以有效解决电机系统中的参数变化、外部扰动和建模误差等问题,提高电机系统的稳定性和鲁棒性。
本文将对电机的鲁棒控制技术的研究进行介绍,包括鲁棒控制的基本原理,鲁棒控制器的设计方法和实际应用等方面。
鲁棒控制的基本原理鲁棒控制是一种针对不确定性系统的控制方法。
不确定性系统指的是系统的参数变化、外部扰动和建模误差等因素引起的系统不确定性。
鲁棒控制的基本原理是通过设计一个稳定的控制器来控制不确定性系统,使得系统的性能不受参数变化和扰动的影响。
鲁棒控制的设计方法主要包括H∞控制、μ合成和基于小区间控制等。
H∞控制是一种基于线性矩阵不等式(LMI)的鲁棒控制方法,该方法通过最小化系统的H∞范数来设计鲁棒控制器。
H∞控制器具有较强的鲁棒性能,可以有效抵抗系统的参数变化和外部扰动。
μ合成是一种通过最小化系统的鲁棒稳定裕度来设计鲁棒控制器的方法,该方法在H∞控制的基础上引入了鲁棒稳定裕度的概念。
基于小区间控制是一种通过将系统的参数变化和扰动建模为小区间形式来设计鲁棒控制器的方法,该方法可以有效降低系统对参数变化和扰动的敏感性。
鲁棒控制器的设计方法鲁棒控制器的设计方法主要包括模型匹配、频域设计和时域设计等。
模型匹配是一种通过将系统的模型与期望模型匹配来设计鲁棒控制器的方法,该方法通过调整控制器的参数使得系统的响应与期望模型的响应一致。
频域设计是一种通过频域分析和设计来设计鲁棒控制器的方法,该方法通过设计系统的频率响应曲线来达到鲁棒控制的目的。
时域设计是一种通过时域分析和设计来设计鲁棒控制器的方法,该方法通过设计系统的时域响应曲线来达到鲁棒控制的目的。
鲁棒控制技术的应用鲁棒控制技术在电机控制系统中有广泛的应用。
电机控制系统是一个典型的不确定性系统,受到环境温度、负载变化和系统参数变化等因素的影响较大。
鲁棒控制技术可以有效解决电机控制系统中的这些问题,提高电机系统的稳定性和鲁棒性。
交流异步电机调速系统鲁棒控制算法研究的开题报告题目:交流异步电机调速系统鲁棒控制算法研究研究背景与意义:随着现代工业的不断发展,交流异步电机逐渐取代了传统的直流电机,成为了工业领域中广泛使用的电机类型。
交流异步电机调速系统作为一个典型的控制系统,其鲁棒性直接影响电机运转的稳定性和可靠性。
因此,如何针对交流异步电机调速系统设计高效的鲁棒控制算法,已成为电机控制领域中的研究热点之一。
研究内容:本研究将借助现有的鲁棒控制理论,研究基于H∞控制策略的交流异步电机调速系统鲁棒控制算法,并利用MATLAB/Simulink等工具对设计的控制算法进行仿真验证。
具体内容如下:1. 研究交流异步电机调速系统的基本原理和传统控制算法;2. 研究H∞控制理论的基本原理;3. 设计H∞控制策略下的交流异步电机调速系统鲁棒控制算法;4. 使用MATLAB/Simulink等仿真工具验证所设计的控制算法的性能;5. 对比仿真结果,验证H∞控制策略下的鲁棒控制算法在交流异步电机调速系统中的优越性。
研究方法:本研究主要采用文献调研和仿真验证的方法:1. 阅读相关电机控制领域的文献资料,了解交流异步电机调速系统的基本原理、现有的控制算法和鲁棒控制理论的基本原理;2. 设计基于H∞控制策略的交流异步电机调速系统鲁棒控制算法;3. 再使用MATLAB/Simulink等仿真工具对所设计的控制算法进行仿真验证;4. 对比仿真结果,分析H∞控制策略下的鲁棒控制算法在交流异步电机调速系统中的控制性能。
预期成果:通过本研究,得到如下的研究成果:1. 基于H∞控制策略的交流异步电机调速系统鲁棒控制算法;2. 针对所设计的控制算法进行的仿真结果,展示其性能优越性;3. 对所设计的控制算法进行评估和分析,得出结论;4. 相关论文的发表。
研究难点:本研究中的主要难点包括:1. 如何正确建立交流异步电机调速系统的数学模型和控制系统模型;2. 如何设计出能够满足交流异步电机调速系统实际应用场景需求的鲁棒控制算法;3. 如何通过仿真验证,展示所设计的鲁棒控制算法的性能优越性。