鲁棒性分析ppt课件
- 格式:ppt
- 大小:1.18 MB
- 文档页数:33


1鲁棒性的基本概念“鲁棒”是一个音译词,其英文为robust ,意思是“强壮的”、“健壮的”。
在控制理论中,鲁棒性表示当一个控制系统中的参数或外部环境发生变化(摄动)时,系统能否保持正常工作的一种特性或属性。
鲁棒概念可以描述为:假定对象的数学模型属于一集合,考察反馈系统的某些特性,如内部稳定性,给定一控制器K,如果集合中的每一个对象都能保持这种特性成立,则称该控制器对此特性是鲁棒的。
因此谈及鲁棒性必有一个控制器、一个对象的集合和某些系统特性。
由于一个具有良好鲁棒性的控制系统能够保证,当控制参数发生变化(或在一定范围内发生了变化)时系统仍能具有良好的控制性能。
因此,我们在设计控制器时就要考虑使得控制系统具有好的鲁棒性,即设计具有鲁棒性的控制器——鲁棒控制器。
所以,鲁棒控制就是设计这样一种控制器,它能保证控制对象在自身参数或外部环境在某种范围内发生变化时,仍能正常工作。
这种控制器的特点是当上述变化发生时,控制器自身的结构和参数都不改变。
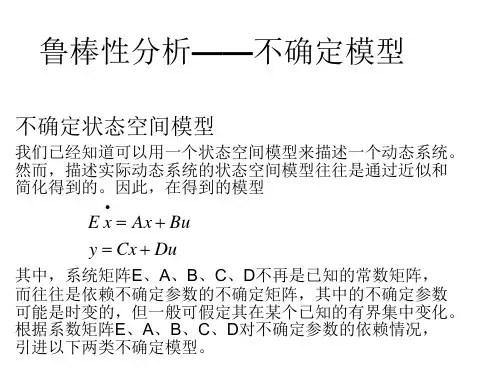
2 鲁棒控制系统我们总是假设已经知道了受控对象的模型,但由于在实际问题中,系统特性或参数的变化常常是不可避免的,在实际中存在种种不确定因素,如: 1)参数变化;2)未建模动态特性; 3)平衡点的变化; 4)传感器噪声;5)不可预测的干扰输入; 等等。
产生变化的原因主要有两个方面,一个是由于测量的不精确使特性或参数的实际值偏离它的设计值;另一个是系统运行过程中受环境因素的影响而引起特性或参数的缓慢变化。
因此,如何使所设计的控制系统在系统参数发生摄动的情况下,仍具有期望的性能便成为控制理论中的一个重要研究课题。
所以我们所建立的对象模型只能是实际物理系统的不精确的表示。
鲁棒系统设计的目标就是要在模型不精确和存在其他变化因素的条件下,使系统仍能保持预期的性能。
如果模型的变化和模型的不精确不影响系统的稳定性和其它动态性能,这样的系统我们称它为鲁棒控制系统。
2.1系统的不确定性 2.1.1参数不确定性 如二阶系统:()[]+-∈++=a a a as s s G ,,112可以代表带阻尼的弹簧装置,RLC 电路等。