基于卡尔曼滤波的背景估计及其算法实现
- 格式:pdf
- 大小:369.81 KB
- 文档页数:3
基于卡尔曼滤波算法的上证50指数预测卡尔曼滤波(Kalman Filter)是一种常用的状态估计算法,被广泛应用于时间序列预测、机器人导航、航空航天等领域。
本文将基于卡尔曼滤波算法,对上证50指数进行预测。
一、卡尔曼滤波原理卡尔曼滤波是一种递归滤波算法,它能够根据当前的状态估计值和观测值,预测未来的状态,并通过不断迭代更新来提高预测的准确性。
卡尔曼滤波算法基于一个基本假设,即系统的状态变量可以用一个线性的随机过程来描述,观测值是由状态变量和观测噪声构成的。
卡尔曼滤波算法由两个步骤组成:预测步骤和更新步骤。
预测步骤用于根据当前的状态估计值和状态转移模型,预测下一时刻的状态;更新步骤用于根据观测值和观测模型,结合预测值进行状态估计的修正。
二、上证50指数预测模型上证50指数是中国证券市场的重要指标之一,代表了上海证券交易所中市值较大的50只股票的整体走势。
为了预测上证50指数的未来走势,我们需要建立一个适合的预测模型。
我们可以将上证50指数的收盘价视为状态变量,用卡尔曼滤波算法进行预测。
假设上证50指数的状态转移模型是一个线性的动态系统,即:x(k) = F * x(k-1) + w(k-1)x(k)表示第k时刻的状态向量,F是状态转移矩阵,w(k-1)是过程噪声。
观测模型可以表示为:z(k) = H * x(k) + v(k)z(k)表示第k时刻的观测值,H是观测矩阵,v(k)是观测噪声。
三、上证50指数预测流程1. 初始化:设定初始状态估计值x(0)和初始误差协方差阵P(0);2. 预测步骤:根据状态转移模型和过程噪声,预测当前时刻的状态估计值x^-(k)和误差协方差阵P^-(k);3. 更新步骤:根据观测值和观测噪声,结合预测值进行状态估计的修正,计算当前时刻的状态估计值x(k)和误差协方差阵P(k);4. 重复步骤2和步骤3,直到预测出未来一段时间的上证50指数走势。
四、上证50指数预测实例为了验证卡尔曼滤波算法在预测上证50指数中的有效性,我们通过收集过去一段时间的上证50指数数据,建立卡尔曼滤波模型并进行预测。
基于卡尔曼滤波的雷达航迹跟踪算法的综述雷达航迹跟踪算法是指通过对窄带雷达前端数据进行处理,提取目标运动参数,及时更新目标航迹状态并预测其运动趋势。
而卡尔曼滤波是一种广泛应用于目标跟踪中的预测算法,它基于线性系统理论,采用贝叶斯估计方法对系统状态进行估计和修正,大大提高了目标跟踪的准确性和效率。
卡尔曼滤波结构包括预测和修正两个步骤,其中预测步骤利用历史状态信息和运动模型预测目标在下一时刻的位置和速度;修正步骤采用测量数据进行状态更新,同时根据卡尔曼增益的大小决定历史状态和测量数据的权重,从而实现目标状态的估计和修正。
在雷达航迹跟踪应用中,卡尔曼滤波算法主要分为单目标跟踪和多目标跟踪两种类型。
单目标跟踪主要关注单个目标的运动状态估计,最常用的滤波方法是一维、二维或三维卡尔曼滤波;而多目标跟踪则需要同时估计多个目标的运动状态,常用的算法包括多维卡尔曼滤波和粒子滤波等。
对于雷达航迹跟踪算法而言,卡尔曼滤波的优点在于:首先,具有高效的滤波性能,可以通过在线实时计算实现目标状态的估计和预测;其次,支持多个传感器、多个目标和多个测量的输入,可以满足多种实际应用需求;最后,具有一定的容错性,能够自适应地处理噪声、模型误差以及目标突然出现、消失等情况。
然而,卡尔曼滤波算法在雷达航迹跟踪应用中也存在一些问题,如目标的失配、多传感器测量的一致性问题、目标运动模型的不确定性等。
因此,为实现更准确、稳健和高效的雷达航迹跟踪,需要深入研究卡尔曼滤波算法的各种变形和优化,创新性地设计新算法,以及运用机器学习、深度学习等技术,提升雷达航迹跟踪算法的性能和鲁棒性。
总之,基于卡尔曼滤波的雷达航迹跟踪算法是目前领先的目标跟踪方法之一,具有广泛应用前景。
未来的研究重点应该是在加强对目标状态的估计、提高对多目标、多传感器的处理能力,以及结合其他技术来提高雷达航迹跟踪的性能和实用性。
卡尔曼滤波算法基本原理一、概述卡尔曼滤波算法是一种基于线性系统状态空间模型的递归滤波算法,主要用于估计含有噪声的测量数据,并能够有效地消除噪声对估计的影响,提高估计精度。
本篇文章将详细介绍卡尔曼滤波算法的基本原理。
二、基本原理1.状态方程:卡尔曼滤波算法基于线性系统状态空间模型,该模型可以用状态方程来表示。
状态方程通常包含系统的内部状态、输入和输出,可以用数学公式表示为:x(t+1)=Ax(t)+Bu(t)+w(t)。
其中,x(t)表示系统内部状态,u(t)表示输入,w(t)表示测量噪声。
2.测量方程:测量数据通常受到噪声的影响,卡尔曼滤波算法通过建立测量方程来处理噪声数据。
测量方程通常表示为:z(t)=h(x(t))+v(t),其中z(t)表示测量数据,h(x(t))表示系统输出,v(t)表示测量噪声。
3.卡尔曼滤波算法:卡尔曼滤波算法通过递归的方式,根据历史状态和测量数据来估计当前系统的内部状态。
算法的核心是利用过去的估计误差和测量误差来预测当前的状态,并不断更新估计值,以达到最优估计的效果。
卡尔曼滤波算法主要包括预测和更新两个步骤。
预测步骤根据状态方程和上一步的估计值,预测当前的状态;更新步骤则根据当前的测量数据和预测值,以及系统协方差矩阵,来更新当前状态的估计值和系统协方差矩阵。
4.滤波器的选择:在实际应用中,需要根据系统的特性和噪声的性质来选择合适的卡尔曼滤波器。
常见的滤波器有标准卡尔曼滤波器、扩展卡尔曼滤波器等。
选择合适的滤波器可以提高估计精度,降低误差。
三、应用场景卡尔曼滤波算法在许多领域都有应用,如航空航天、自动驾驶、机器人控制等。
在上述领域中,由于系统复杂、噪声干扰大,使用卡尔曼滤波算法可以有效地提高系统的估计精度和控制效果。
四、总结卡尔曼滤波算法是一种基于线性系统状态空间模型的递归滤波算法,通过预测和更新的方式,能够有效地消除噪声对估计的影响,提高估计精度。
本篇文章详细介绍了卡尔曼滤波算法的基本原理和应用场景,希望能对大家有所帮助。
基于卡尔曼滤波算法的上证50指数预测卡尔曼滤波算法是一种常用的滤波算法,它可以用来预测时间序列数据。
本文将介绍基于卡尔曼滤波算法的上证50指数预测。
一、卡尔曼滤波算法简介卡尔曼滤波算法是一种递归滤波算法,它能够根据当前的观测值和历史的预测值推测出未来的状态。
其基本原理是根据系统的动力学模型和观测模型,通过迭代的方式不断更新状态的估计值和协方差矩阵。
卡尔曼滤波算法的基本步骤如下:1. 初始化状态的估计值和协方差矩阵;2. 根据系统的动力学模型预测状态的估计值和协方差矩阵;3. 根据观测模型更新状态的估计值和协方差矩阵;4. 重复步骤2和步骤3,直到得到最终的状态估计值。
二、数据预处理在进行卡尔曼滤波算法之前,首先需要对数据进行预处理。
对于上证50指数的预测,我们可以先将原始数据进行平滑处理,可以使用移动平均或指数平滑等方法,以减少数据的噪声和突变。
三、模型构建与参数估计卡尔曼滤波算法的有效性依赖于模型的准确性和参数的准确估计。
在构建预测模型时,可以考虑采用ARMA模型作为状态的动力学模型,以及线性模型作为观测的模型。
通过对历史数据进行拟合,可以得到ARMA模型的系数和噪声方差,进而得到卡尔曼滤波算法中的动力学模型和观测模型的参数。
对于每一步的预测,都可以得到一个状态的估计值和协方差矩阵。
通过不断更新状态的估计值和协方差矩阵,我们可以得到未来一段时间内上证50指数的预测值。
五、结果评估与优化在得到预测结果后,需要对其进行评估和优化。
可以使用一些常见的评价指标,如均方根误差(RMSE)和平均绝对误差(MAE)等,来评估预测结果的准确性。
如果预测结果不够准确,可以进行模型参数的优化。
可以尝试不同的动力学模型和观测模型,通过调整模型的参数来改善预测结果。
六、总结本文介绍了基于卡尔曼滤波算法的上证50指数预测方法。
通过构建卡尔曼滤波模型,可以根据历史数据预测未来一段时间内的指数走势。
卡尔曼滤波算法的预测结果受模型的准确性和参数的准确估计影响较大,需要进行适当的模型优化和参数调整。
卡尔曼滤波算法在陀螺仪调校中的应用实践及其效果分析随着现代科技的发展,许多新的设备和技术已经被应用于各种领域,包括机械、物流、电子等等。
其中,陀螺仪作为一种重要的设备,被广泛应用于惯性导航、惯性传感器、力矩传感器等场合中。
而如何调整陀螺仪,以适应各种不同的工作环境和应用场景,是陀螺仪使用中不可忽视的问题。
卡尔曼滤波算法是一种用于系统状态估计的算法,它具有优秀的滤波效果和计算精度。
在陀螺仪调校中,卡尔曼滤波算法可以被用于陀螺仪数据的滤波和修正,从而提高陀螺仪的精度和稳定性。
在本文中,我们将深入探讨卡尔曼滤波算法在陀螺仪调校中的应用实践,以及其效果分析。
一、卡尔曼滤波算法的原理卡尔曼滤波算法是一种递推滤波算法,其主要思想是利用系统的状态方程和观测方程,以最小均方误差为准则,对系统的状态进行估计和控制。
其原理具体如下:(1) 状态方程:用于描述系统状态变化的动态方程式,通常采用线性状态方程或非线性状态方程进行描述。
(2) 观测方程:用于描述系统状态的测量模型,通常采用线性方程进行描述,可以将系统的状态量通过观测量进行测量。
(3) 卡尔曼增益:用于评估观测数据的可靠性,以进行权衡。
(4) 状态预测:用于预测下一时刻的系统状态。
(5) 状态修正:用于修正当前时刻的系统状态。
以上五个环节,是卡尔曼滤波算法的核心。
通过对系统状态的预测和修正,可以保证系统的状态估计值贴近于真实值,从而提高系统的精度和稳定性。
二、卡尔曼滤波算法在陀螺仪调校中的应用实践在陀螺仪调校中,卡尔曼滤波算法可以被用于对陀螺仪数据进行修正和滤波。
具体步骤如下:(1) 设计状态方程:以陀螺仪输出的旋转角速度为状态,将其表示为状态变量,并构造状态方程。
(2) 设计观测方程:以陀螺仪的测量值为观测变量,构造观测方程。
(3) 调节控制参数:根据实际情况,调节卡尔曼滤波算法的控制参数,包括Q和R矩阵等。
(4) 进行滤波计算:利用上述设计的状态方程和观测方程,对陀螺仪的数据进行滤波计算,获得更为准确的陀螺仪输出值。
基于卡尔曼滤波算法的上证50指数预测1. 引言1.1 背景介绍随着金融市场波动的加剧和信息化程度的提高,传统的技术分析方法已经不能满足对市场走势准确预测的需求。
而卡尔曼滤波算法以其对系统模型和测量模型的有效融合,能够更好地捕捉到市场的隐含信息,从而提高预测的准确性和稳定性。
通过构建基于该算法的上证50指数预测模型,可以为投资者提供更可靠的决策依据,帮助他们更好地把握市场走势和投资机会。
本研究将对卡尔曼滤波算法进行简要介绍,介绍上证50指数数据的采集与预处理过程,并详细阐述基于该算法的预测模型构建方法。
通过实证分析和结果讨论,将探讨该模型的优势和不足之处。
将总结研究成果并展望未来研究方向,以期为金融市场预测领域的研究提供新的思路和方法。
1.2 研究目的本研究的目的是探索基于卡尔曼滤波算法的上证50指数预测模型,在当前金融市场中,投资者和分析师需要准确的指数预测来制定投资策略和风险管理措施。
上证50指数作为沪深证券市场的主要股票指数之一,其波动情况直接影响着市场的整体表现。
通过基于卡尔曼滤波算法的预测模型,我们希望能够提高对上证50指数未来走势的准确性和稳定性,为投资者提供可靠的决策参考。
具体而言,本研究将对卡尔曼滤波算法进行深入剖析,探讨其在金融领域中的应用优势和特点。
我们将收集上证50指数的历史数据进行预处理和分析,为构建预测模型奠定基础。
通过将卡尔曼滤波算法与上证50指数数据相结合,我们将建立一个灵活高效的预测模型,以期提高预测准确度并探讨其在实证分析中的效果。
本研究旨在为金融市场预测领域的研究提供新的思路和方法,为投资者提供更加可靠和准确的上证50指数预测服务。
1.3 研究意义上证50指数作为中国A股市场的重要指标之一,其走势直接关系到投资者的决策和市场的稳定。
通过基于卡尔曼滤波算法的上证50指数预测,可以提高投资者对市场走势的预测能力,降低投资风险,优化投资组合,从而提高投资收益率。
研究的意义在于通过引入先进的信号处理算法,可以更准确地预测上证50指数的未来走势,为投资者提供更可靠的市场分析和决策支持。
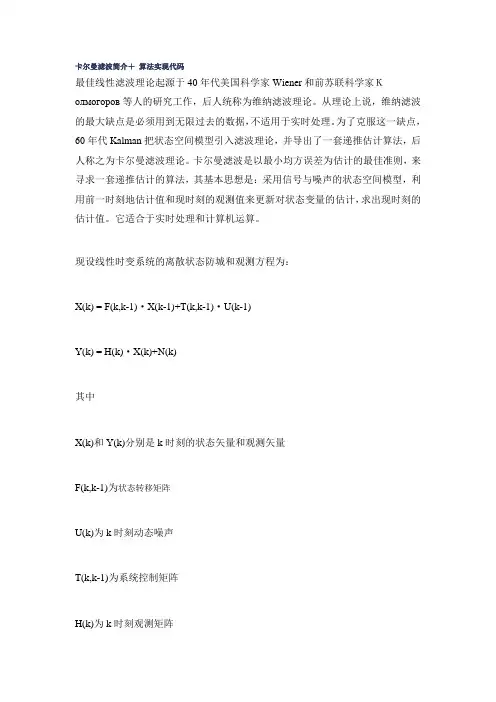
卡尔曼滤波简介+算法实现代码最佳线性滤波理论起源于40年代美国科学家Wiener和前苏联科学家Kолмогоров等人的研究工作,后人统称为维纳滤波理论。
从理论上说,维纳滤波的最大缺点是必须用到无限过去的数据,不适用于实时处理。
为了克服这一缺点,60年代Kalman把状态空间模型引入滤波理论,并导出了一套递推估计算法,后人称之为卡尔曼滤波理论。
卡尔曼滤波是以最小均方误差为估计的最佳准则,来寻求一套递推估计的算法,其基本思想是:采用信号与噪声的状态空间模型,利用前一时刻地估计值和现时刻的观测值来更新对状态变量的估计,求出现时刻的估计值。
它适合于实时处理和计算机运算。
现设线性时变系统的离散状态防城和观测方程为:X(k) = F(k,k-1)·X(k-1)+T(k,k-1)·U(k-1)Y(k) = H(k)·X(k)+N(k)其中X(k)和Y(k)分别是k时刻的状态矢量和观测矢量F(k,k-1)为状态转移矩阵U(k)为k时刻动态噪声T(k,k-1)为系统控制矩阵H(k)为k时刻观测矩阵N(k)为k时刻观测噪声则卡尔曼滤波的算法流程为:1.预估计X(k)^= F(k,k-1)·X(k-1)2.计算预估计协方差矩阵C(k)^=F(k,k-1)×C(k)×F(k,k-1)'+T(k,k-1)×Q(k)×T(k,k-1)'Q(k) = U(k)×U(k)'3.计算卡尔曼增益矩阵K(k) = C(k)^×H(k)'×[H(k)×C(k)^×H(k)'+R(k)]^(-1)R(k) = N(k)×N(k)'4.更新估计X(k)~=X(k)^+K(k)×[Y(k)-H(k)×X(k)^]5.计算更新后估计协防差矩阵C(k)~ = [I-K(k)×H(k)]×C(k)^×[I-K(k)×H(k)]'+K(k)×R(k)×K(k)'6.X(k+1) = X(k)~C(k+1) = C(k)~重复以上步骤其c语言实现代码如下:#include "stdlib.h"#include "rinv.c"int lman(n,m,k,f,q,r,h,y,x,p,g)int n,m,k;double f[],q[],r[],h[],y[],x[],p[],g[];{ int i,j,kk,ii,l,jj,js;double *e,*a,*b;e=malloc(m*m*sizeof(double));l=m;if (l<n) l=n;a=malloc(l*l*sizeof(double));b=malloc(l*l*sizeof(double));for (i=0; i<=n-1; i++)for (j=0; j<=n-1; j++){ ii=i*l+j; a[ii]=0.0;for (kk=0; kk<=n-1; kk++)a[ii]=a[ii]+p[i*n+kk]*f[j*n+kk];}for (i=0; i<=n-1; i++)for (j=0; j<=n-1; j++){ ii=i*n+j; p[ii]=q[ii];for (kk=0; kk<=n-1; kk++)p[ii]=p[ii]+f[i*n+kk]*a[kk*l+j];}for (ii=2; ii<=k; ii++){ for (i=0; i<=n-1; i++)for (j=0; j<=m-1; j++){ jj=i*l+j; a[jj]=0.0;for (kk=0; kk<=n-1; kk++)a[jj]=a[jj]+p[i*n+kk]*h[j*n+kk];}for (i=0; i<=m-1; i++)for (j=0; j<=m-1; j++){ jj=i*m+j; e[jj]=r[jj];for (kk=0; kk<=n-1; kk++)e[jj]=e[jj]+h[i*n+kk]*a[kk*l+j];}js=rinv(e,m);if (js==0){ free(e); free(a); free(b); return(js);}for (i=0; i<=n-1; i++)for (j=0; j<=m-1; j++){ jj=i*m+j; g[jj]=0.0;for (kk=0; kk<=m-1; kk++)g[jj]=g[jj]+a[i*l+kk]*e[j*m+kk];}for (i=0; i<=n-1; i++){ jj=(ii-1)*n+i; x[jj]=0.0;for (j=0; j<=n-1; j++)x[jj]=x[jj]+f[i*n+j]*x[(ii-2)*n+j];}for (i=0; i<=m-1; i++){ jj=i*l; b[jj]=y[(ii-1)*m+i];for (j=0; j<=n-1; j++)b[jj]=b[jj]-h[i*n+j]*x[(ii-1)*n+j];}for (i=0; i<=n-1; i++){ jj=(ii-1)*n+i;for (j=0; j<=m-1; j++)x[jj]=x[jj]+g[i*m+j]*b[j*l];}if (ii<k){ for (i=0; i<=n-1; i++)for (j=0; j<=n-1; j++){ jj=i*l+j; a[jj]=0.0;for (kk=0; kk<=m-1; kk++)a[jj]=a[jj]-g[i*m+kk]*h[kk*n+j];if (i==j) a[jj]=1.0+a[jj];}for (i=0; i<=n-1; i++)for (j=0; j<=n-1; j++){ jj=i*l+j; b[jj]=0.0;for (kk=0; kk<=n-1; kk++)b[jj]=b[jj]+a[i*l+kk]*p[kk*n+j];}for (i=0; i<=n-1; i++)for (j=0; j<=n-1; j++){ jj=i*l+j; a[jj]=0.0;for (kk=0; kk<=n-1; kk++)a[jj]=a[jj]+b[i*l+kk]*f[j*n+kk];}for (i=0; i<=n-1; i++)for (j=0; j<=n-1; j++){ jj=i*n+j; p[jj]=q[jj];for (kk=0; kk<=n-1; kk++)p[jj]=p[jj]+f[i*n+kk]*a[j*l+kk];}}}free(e); free(a); free(b);return(js);}C++实现代码如下:============================kalman.h================= ===============// kalman.h: interface for the kalm an class.////////////////////////////////////////////////////////////////////////#if !defined(AFX_KALMAN_H__ED3D740F_01D2_4616_8B74_8BF57636F2C0__IN CLUDED_)#define AFX_KALMAN_H__ED3D740F_01D2_4616_8B74_8BF57636F2C0__INCLU DED_#if _MSC_VER > 1000#pragma once#endif// _MSC_VER > 1000#include <math.h>#include "cv.h"class kalman{public:void init_kalman(int x,int xv,int y,int yv);CvKalman* cvkalman;CvMat* state;CvMat* process_noise;CvMat* m easurem ent;const CvMat* prediction;CvPoint2D32f get_predict(float x, float y);kalman(int x=0,int xv=0,int y=0,int yv=0);//virtual ~kalman();};#endif// !defined(AFX_KALMAN_H__ED3D740F_01D2_4616_8B74_8BF57636F2C 0__INCLUDED_)============================kalman.cpp=============== =================#include "kalman.h"#include <stdio.h>/* tester de printer toutes les valeurs des vecteurs*//* tester de changer les matrices du noises *//* replace state by cvkalman->state_post ??? */CvRandState rng;const double T = 0.1;kalman::kalman(int x,int xv,int y,int yv){cvkalm an = cvCreateKalman( 4, 4, 0 );state = cvCreateMat( 4, 1, CV_32FC1 );process_noise = cvCreateMat( 4, 1, CV_32FC1 );m easurement = cvCreateMat( 4, 1, CV_32FC1 );int code = -1;/* create m atrix data */const float A[] = {1, T, 0, 0,0, 1, 0, 0,0, 0, 1, T,0, 0, 0, 1};const float H[] = {1, 0, 0, 0,0, 0, 0, 0,0, 0, 1, 0,0, 0, 0, 0};const float P[] = {pow(320,2), pow(320,2)/T, 0, 0,pow(320,2)/T, pow(320,2)/pow(T,2), 0, 0, 0, 0, pow(240,2), pow(240,2)/T,0, 0, pow(240,2)/T, pow(240,2)/pow(T,2) };const float Q[] = {pow(T,3)/3, pow(T,2)/2, 0, 0,pow(T,2)/2, T, 0, 0,0, 0, pow(T,3)/3, pow(T,2)/2,0, 0, pow(T,2)/2, T};const float R[] = {1, 0, 0, 0,0, 0, 0, 0,0, 0, 1, 0,0, 0, 0, 0};cvRandInit( &rng, 0, 1, -1, CV_RAND_UNI );cvZero( m easurement );cvRandSetRange( &rng, 0, 0.1, 0 );rng.disttype = CV_RAND_NORMAL;cvRand( &rng, state );m em cpy( cvkalman->transition_matrix->data.fl, A, sizeof(A));m em cpy( cvkalman->measurement_m atrix->data.fl, H, sizeof(H));m em cpy( cvkalman->process_noise_cov->data.fl, Q, sizeof(Q));m em cpy( cvkalman->error_cov_post->data.fl, P, sizeof(P));m em cpy( cvkalman->measurement_noise_cov->data.fl, R, sizeof(R));//cvSetIdentity( cvkalman->process_noise_cov, cvRealScalar(1e-5) ); //cvSetIdentity( cvkalman->error_cov_post, cvRealScalar(1));//cvSetIdentity( cvkalm an->measurement_noise_cov, cvRealScalar(1e-1) );/* choose initial state */state->data.fl[0]=x;state->data.fl[1]=xv;state->data.fl[2]=y;state->data.fl[3]=yv;cvkalm an->state_post->data.fl[0]=x;cvkalm an->state_post->data.fl[1]=xv;cvkalm an->state_post->data.fl[2]=y;cvkalm an->state_post->data.fl[3]=yv;cvRandSetRange( &rng, 0, sqrt(cvkalman->process_noise_cov->data.fl[0]), 0 ); cvRand( &rng, process_noise );}CvPoint2D32f kalman::get_predict(float x, float y){/* update state with current position */state->data.fl[0]=x;state->data.fl[2]=y;/* predict point position *//* x'k=A鈥 k+B鈥 kP'k=A鈥 k-1*AT + Q */cvRandSetRange( &rng, 0, sqrt(cvkalman->measurem ent_noise_cov->data.fl [0]), 0 );cvRand( &rng, m easurement );/* xk=A?xk-1+B?uk+wk */cvMatMulAdd( cvkalman->transition_matrix, state, process_noise, cvkalm an-> state_post );/* zk=H?xk+vk */cvMatMulAdd( cvkalman->measurement_matrix, cvkalman->state_post, m eas urement, m easurement );/* adjust Kalman filter state *//* Kk=P'k鈥 T鈥?H鈥 'k鈥 T+R)-1xk=x'k+Kk鈥?zk-H鈥 'k)Pk=(I-Kk鈥 )鈥 'k */cvKalmanCorrect( cvkalman, measurement );float m easured_value_x = m easurem ent->data.fl[0];float m easured_value_y = m easurem ent->data.fl[2];const CvMat* prediction = cvKalmanPredict( cvkalman, 0 );float predict_value_x = prediction->data.fl[0];float predict_value_y = prediction->data.fl[2];return(cvPoint2D32f(predict_value_x,predict_value_y));}void kalman::init_kalman(int x,int xv,int y,int yv){state->data.fl[0]=x;state->data.fl[1]=xv;state->data.fl[2]=y;state->data.fl[3]=yv;cvkalm an->state_post->data.fl[0]=x; cvkalm an->state_post->data.fl[1]=xv; cvkalm an->state_post->data.fl[2]=y; cvkalm an->state_post->data.fl[3]=yv; }。
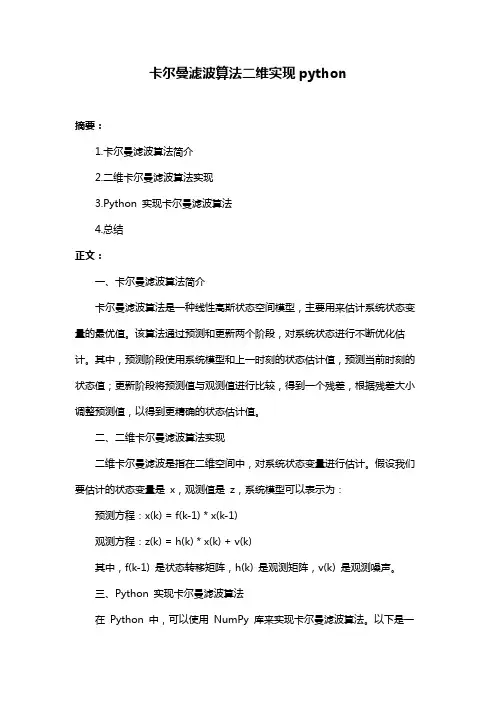
卡尔曼滤波算法二维实现python摘要:1.卡尔曼滤波算法简介2.二维卡尔曼滤波算法实现3.Python 实现卡尔曼滤波算法4.总结正文:一、卡尔曼滤波算法简介卡尔曼滤波算法是一种线性高斯状态空间模型,主要用来估计系统状态变量的最优值。
该算法通过预测和更新两个阶段,对系统状态进行不断优化估计。
其中,预测阶段使用系统模型和上一时刻的状态估计值,预测当前时刻的状态值;更新阶段将预测值与观测值进行比较,得到一个残差,根据残差大小调整预测值,以得到更精确的状态估计值。
二、二维卡尔曼滤波算法实现二维卡尔曼滤波是指在二维空间中,对系统状态变量进行估计。
假设我们要估计的状态变量是x,观测值是z,系统模型可以表示为:预测方程:x(k) = f(k-1) * x(k-1)观测方程:z(k) = h(k) * x(k) + v(k)其中,f(k-1) 是状态转移矩阵,h(k) 是观测矩阵,v(k) 是观测噪声。
三、Python 实现卡尔曼滤波算法在Python 中,可以使用NumPy 库来实现卡尔曼滤波算法。
以下是一个简单的示例:```pythonimport numpy as npdef predict(x, P, F):"""预测阶段"""x_pred = F @ xP_pred=F@*****+Qreturn x_pred, P_preddef update(x, P, z, H, R):"""更新阶段"""y_pred = H @ xy_obs = zS=H@*****+RK=*****@np.linalg.inv(S)x_pred = x + K @ (y_obs - y_pred)P_pred = (np.eye(P.shape[0], dtype=int) - K @ H) @ Preturn x_pred, P_pred# 初始化状态和协方差矩阵x = np.array([1, 0])P = np.array([[1, 0], [0, 1]])# 系统模型和观测模型F = np.array([[1, 0], [0, 1]])H = np.array([[1, 0]])Q = np.array([[0.1, 0], [0, 0.1]])R = np.array([[0.1]])# 进行预测和更新x_pred, P_pred = predict(x, P, F)z = np.array([1.1, 0])x_pred_updated, P_pred_updated = update(x_pred, P_pred, z, H, R) print("预测状态:", x_pred)print("预测协方差:", P_pred)print("更新后状态:", x_pred_updated)print("更新后协方差:", P_pred_updated)```四、总结卡尔曼滤波算法是一种在噪声环境下,对系统状态进行估计的线性高斯状态空间模型。
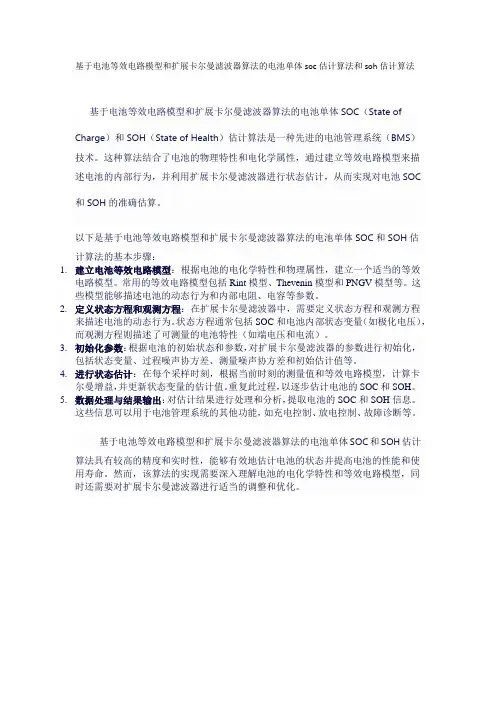
基于电池等效电路模型和扩展卡尔曼滤波器算法的电池单体soc估计算法和soh估计算法基于电池等效电路模型和扩展卡尔曼滤波器算法的电池单体SOC(State of Charge)和SOH(State of Health)估计算法是一种先进的电池管理系统(BMS)技术。
这种算法结合了电池的物理特性和电化学属性,通过建立等效电路模型来描述电池的内部行为,并利用扩展卡尔曼滤波器进行状态估计,从而实现对电池SOC 和SOH的准确估算。
以下是基于电池等效电路模型和扩展卡尔曼滤波器算法的电池单体SOC和SOH估计算法的基本步骤:1.建立电池等效电路模型:根据电池的电化学特性和物理属性,建立一个适当的等效电路模型。
常用的等效电路模型包括Rint模型、Thevenin模型和PNGV模型等。
这些模型能够描述电池的动态行为和内部电阻、电容等参数。
2.定义状态方程和观测方程:在扩展卡尔曼滤波器中,需要定义状态方程和观测方程来描述电池的动态行为。
状态方程通常包括SOC和电池内部状态变量(如极化电压),而观测方程则描述了可测量的电池特性(如端电压和电流)。
3.初始化参数:根据电池的初始状态和参数,对扩展卡尔曼滤波器的参数进行初始化,包括状态变量、过程噪声协方差、测量噪声协方差和初始估计值等。
4.进行状态估计:在每个采样时刻,根据当前时刻的测量值和等效电路模型,计算卡尔曼增益,并更新状态变量的估计值。
重复此过程,以逐步估计电池的SOC和SOH。
5.数据处理与结果输出:对估计结果进行处理和分析,提取电池的SOC和SOH信息。
这些信息可以用于电池管理系统的其他功能,如充电控制、放电控制、故障诊断等。
基于电池等效电路模型和扩展卡尔曼滤波器算法的电池单体SOC和SOH估计算法具有较高的精度和实时性,能够有效地估计电池的状态并提高电池的性能和使用寿命。
然而,该算法的实现需要深入理解电池的电化学特性和等效电路模型,同时还需要对扩展卡尔曼滤波器进行适当的调整和优化。
卡尔曼滤波详解卡尔曼滤波是一种常用的状态估计方法,它可以根据系统的动态模型和观测数据,对系统的状态进行估计。
卡尔曼滤波广泛应用于机器人导航、飞行控制、信号处理等领域。
本文将详细介绍卡尔曼滤波的原理、算法及应用。
一、卡尔曼滤波原理卡尔曼滤波的基本思想是利用系统的动态模型和观测数据,对系统的状态进行估计。
在卡尔曼滤波中,系统的状态被表示为一个向量,每个元素表示系统的某个特定状态量。
例如,一个机器人的状态向量可能包括机器人的位置、速度、方向等信息。
卡尔曼滤波的基本假设是系统的动态模型和观测数据都是线性的,而且存在噪声。
系统的动态模型可以表示为:x(t+1) = Ax(t) + Bu(t) + w(t)其中,x(t)表示系统在时刻t的状态向量,A是状态转移矩阵,B是控制矩阵,u(t)表示外部控制输入,w(t)表示系统的过程噪声。
观测数据可以表示为:z(t) = Hx(t) + v(t)其中,z(t)表示系统在时刻t的观测向量,H是观测矩阵,v(t)表示观测噪声。
卡尔曼滤波的目标是根据系统的动态模型和观测数据,估计系统的状态向量x(t)。
为了达到这个目标,卡尔曼滤波将状态估计分为两个阶段:预测和更新。
预测阶段:根据系统的动态模型,预测系统在下一个时刻的状态向量x(t+1)。
预测的过程可以表示为:x^(t+1|t) = Ax^(t|t) + Bu(t)其中,x^(t|t)表示在时刻t的状态向量的估计值,x^(t+1|t)表示在时刻t+1的状态向量的预测值。
卡尔曼滤波还需要对状态的不确定性进行估计,这个不确定性通常用协方差矩阵P(t)表示。
协方差矩阵P(t)表示状态向量估计值和真实值之间的差异程度。
预测阶段中,协方差矩阵也需要进行更新,更新的过程可以表示为:P(t+1|t) = AP(t|t)A' + Q其中,Q表示过程噪声的协方差矩阵。
更新阶段:根据观测数据,更新状态向量的估计值和协方差矩阵。
更新的过程可以表示为:K(t+1) = P(t+1|t)H'(HP(t+1|t)H' + R)^-1x^(t+1|t+1) = x^(t+1|t) + K(t+1)[z(t+1) - Hx^(t+1|t)]P(t+1|t+1) = (I - K(t+1)H)P(t+1|t)其中,K(t+1)表示卡尔曼增益,R表示观测噪声的协方差矩阵,I是单位矩阵。
基于pi自适应卡尔曼滤波的无人机姿态解算算法无人机姿态解算是无人机飞行控制的重要环节之一,它能够实时获取无人机的姿态信息,为无人机的飞行控制提供准确的数据支持。
目前,基于pi自适应卡尔曼滤波的无人机姿态解算算法已经成为了一种较为成熟的解算方法,具有精度高、鲁棒性强等优点。
pi自适应卡尔曼滤波是一种基于卡尔曼滤波的改进算法,它能够自适应地调整卡尔曼滤波的参数,从而提高滤波的精度和鲁棒性。
在无人机姿态解算中,pi自适应卡尔曼滤波可以通过对无人机的加速度计、陀螺仪和磁力计等传感器数据进行滤波,实现对无人机姿态的解算。
具体来说,pi自适应卡尔曼滤波的无人机姿态解算算法包括以下几个步骤:1. 利用加速度计和磁力计测量无人机的姿态角度,并将其转换为欧拉角表示。
2. 利用陀螺仪测量无人机的角速度,并将其转换为欧拉角速度表示。
3. 利用pi自适应卡尔曼滤波对加速度计、陀螺仪和磁力计的数据进行滤波,得到无人机的姿态角度和角速度。
4. 利用姿态角度和角速度的信息,计算无人机的姿态矩阵,并将其转换为欧拉角表示。
5. 利用pi自适应卡尔曼滤波对姿态角度和角速度的数据进行滤波,得到无人机的姿态角度和角速度的估计值。
6. 利用姿态角度和角速度的估计值,计算无人机的姿态矩阵,并将其转换为欧拉角表示。
7. 利用pi自适应卡尔曼滤波对姿态角度和角速度的估计值进行滤波,得到无人机的最终姿态角度和角速度。
通过以上步骤,基于pi自适应卡尔曼滤波的无人机姿态解算算法可以实现对无人机姿态的高精度解算。
同时,该算法还具有鲁棒性强、适应性好等优点,能够适应不同环境下的无人机飞行控制需求。
总之,基于pi自适应卡尔曼滤波的无人机姿态解算算法是一种高精度、鲁棒性强的解算方法,能够为无人机飞行控制提供准确的姿态信息支持。
在未来的无人机应用中,该算法有望得到更广泛的应用和推广。