太阳能跟踪控制器设计
- 格式:doc
- 大小:24.50 KB
- 文档页数:5
太阳能光伏控制器设计、制作一、实验目的:1、了解太阳能光伏控制器的原理;2、了解控制器的设计过程;3、了解控制器PCB板的制作过程;4、了解控制器的焊装及调试二、实验设备计算机线路板雕刻机焊台数字万用表三、实验注意事项实验中注意严格遵照设备使用说明操作,注意安全;四、实验原理太阳能控制器是太阳能光伏系统中重要的组成部分,它在很大程度上决定了太阳能光伏系统的可靠性。
控制器的任务主要是实现太阳能对蓄电池的充电并保护光伏系统中的蓄电池。
1、 UC3906介绍UC3906作为密封铅酸蓄电池充电专用芯片,具有实现密封铅酸蓄电池最佳充电所需的全部控制和检测功能。
内含有独立的电压控制电路和限流放大器,它可以控制芯片内的驱动器。
驱动器提供的输出电流达25mA,可直接驱动外部串联调整管,从而调整充电器的输出电压和电流。
电压和电流检测比较器检测蓄电池的充电状态,并控制充电状态逻辑电路的输入信号。
图1 UC3906内部结构框图当电池电压或温度过低时,充电使能比较器控制充电器进入涓流充电状态。
当驱动器截止时,该比较器还能输出25mA涓流充电电流。
这样,当电池短路或反接时,充电器只能小电流充电,避免了因充电电流过大而损坏电池。
UC3906的一个非常重要特性就是具有精确的基准电压,其基准电压随环境温度而变,且变化规律与铅酸电池电压的温度特性完全一致。
同时,芯片只需1.7mA的输入电流就可工作,这样可以尽量减小芯片的功耗,实现对工作环境温度的准确检测,保证电池既充足电又不会严重过充电。
除此之外,芯片内部还包括一个输入欠压检测电路以对充电周期进行初始化。
这个电路还驱动一个逻辑输出,当加上输入电源后,脚7可以指示电源状态。
如图2所示,由RA、RB和RC组成的电阻分压网络用来检测充电电池的电压,通过与精确的参考电压(VREF)相比较来确定浮充电压、过充电压和涓流充电的阈值电压。
图2 双电平浮充充电器基本电路蓄电池的一个充电周期按时间可分为三种状态:大电流快速充电状态,过充电状态和浮充电状态。
基于51单片机的太阳能热水器控制系统设计一、本文概述随着全球对可再生能源需求的日益增加,太阳能作为一种清洁、可持续的能源形式,已经引起了广泛的关注和应用。
太阳能热水器作为一种常见的太阳能应用产品,其在节能减排、提高生活质量等方面具有显著的优势。
然而,太阳能热水器在实际使用过程中,仍存在一些问题,如水温控制不稳定、能效利用率不高等。
为了解决这些问题,本文提出了一种基于51单片机的太阳能热水器控制系统设计方案。
该系统以51单片机为核心控制器,结合温度传感器、水位传感器、执行机构等硬件设备,实现了对太阳能热水器水温和水位的精确控制。
通过实时监测水温和水位信息,系统能够自动调整加热功率和补水流量,确保水温稳定在用户设定的范围内,同时避免了水资源的浪费。
系统还具有故障诊断功能,能够及时发现并处理潜在的故障问题,提高了系统的可靠性和稳定性。
本文首先介绍了太阳能热水器的工作原理和现状,分析了传统控制系统存在的问题和不足。
然后,详细阐述了基于51单片机的太阳能热水器控制系统的硬件组成和软件设计。
在硬件设计方面,本文介绍了各个硬件模块的功能和选型原则,包括温度传感器、水位传感器、执行机构等。
在软件设计方面,本文详细说明了系统的控制算法和程序流程,包括温度控制算法、水位控制算法、故障诊断算法等。
本文通过实验验证了系统的可行性和有效性,为太阳能热水器的智能化、高效化提供了有益的探索和实践。
本文的研究不仅有助于提升太阳能热水器的能效利用率和用户体验,还为其他可再生能源应用产品的智能化控制提供了有益的参考和借鉴。
本文的研究成果对于推动太阳能热水器行业的技术进步和产业发展具有重要的现实意义和应用价值。
二、太阳能热水器控制系统总体设计太阳能热水器控制系统的总体设计是确保整个系统高效、稳定运行的关键。
在设计过程中,我们充分考虑了太阳能热水器的实际应用场景和用户需求,以及51单片机的性能特点,从而构建了一个既实用又可靠的控制系统。
太阳能双轴跟踪系统原理解析太阳能双轴跟踪系统原理解析1. 引言太阳能作为一种清洁、可再生的能源形式,受到了越来越多的关注和应用。
为了更高效地收集太阳能,提高太阳能发电系统的效率,太阳能双轴跟踪系统应运而生。
本文将深入探讨太阳能双轴跟踪系统的原理及其在太阳能发电领域的应用。
2. 太阳能双轴跟踪系统的基本原理太阳能双轴跟踪系统是一种能够根据太阳的位置来调整太阳能发电设备角度的系统。
它通过使用两个轴(水平轴和垂直轴)来实现对太阳能接收器的定位,以确保太阳能始终垂直照射到接收器上。
这种追踪方式与传统的固定式太阳能系统相比,能够使得接收器相对于太阳的角度始终保持最佳状态,从而提高太阳能发电的效率。
3. 太阳能双轴跟踪系统的构成太阳能双轴跟踪系统主要由以下几个组成部分构成:3.1 太阳能追踪控制器:该控制器根据预设的追踪算法和传感器采集的数据,来计算并控制太阳能发电设备的运动。
它可以通过控制执行机构,调整发电设备的角度和方向。
3.2 电动机或执行机构:太阳能双轴跟踪系统通过电动机或其它执行机构来实现设备的角度调整。
这些电动机或执行机构通过接收控制器的指令,将设备转动到正确的位置上。
3.3 传感器:为了准确地获取太阳的位置信息,太阳能双轴跟踪系统通常会配备多个传感器。
这些传感器可以是太阳光电传感器、倾斜传感器等。
它们通过检测太阳的位置和周围环境的变化,向控制器提供实时的反馈信息,以确保设备能够准确追踪太阳。
3.4 太阳能接收器:太阳能双轴跟踪系统最关键的一部分是太阳能接收器。
它通常由太阳能电池板或聚光器组成,用于将太阳光转化为电能。
通过精确地追踪太阳,太阳能接收器可以最大限度地吸收太阳的能量,提高太阳能的利用效率。
4. 太阳能双轴跟踪系统的优势相较于固定式太阳能系统,太阳能双轴跟踪系统具有以下几个优势:4.1 提高发电效率:通过追踪太阳的位置并使接收器始终垂直照射,太阳能双轴跟踪系统可以最大限度地吸收太阳能,提高发电效率。
MPPT控制器简介MPPT控制器的全称“最大功率点跟踪”(Maximum Power Point Tracking)太阳能控制器,是传统太阳能充放电控制器的升级换代产品。
MPPT控制器能够实时侦测太阳能板的发电电压,并追踪最高电压电流值(VI),使系统以最大功率输出对蓄电池充电。
应用于太阳能光伏系统中,协调太阳能电池板、蓄电池、负载的工作,是光伏系统的大脑。
最大功点跟踪系统是一种通过调节电气模块的工作状态,使光伏板能够输出更多电能的电气系统能够将太阳能电池板发出的直流电有效地贮存在蓄电池中,可有效地解决常规电网不能覆盖的偏远地区及旅游地区的生活和工业用电,不产生环境污染。
原理: 给蓄电池充电,太阳板的输出电压必须高于电池的当前电压,如果太阳能板的电压低于电池的电压,那么输出电流就会接近0。
所以,为了安全起见,太阳能板在制造出厂时,太阳能板的峰值电压(Vpp)大约在17V左右,这是以环境温度为25°C时的标准设定的。
当天气非常热的时候,太阳能板的峰值电压Vpp会降到15V左右,但是在寒冷的天气里,太阳能的峰值电压Vpp可以达到18V。
MPPT太阳能控制器和传统太阳能控制器的区别: 传统的太阳能充放电控制器就有点象手动档的变速箱,当发动机的转速增高的时候,如果变速箱的档位不相应提高的话,势必会影响车速。
但是对于传统控制器来说,充电参数都是在出厂之前就设定好的,就是说,MPPT 控制器会实时跟踪太阳能板中的最大的功率点,来发挥出太阳能板的最大功效。
电压越高,通过最大功率跟踪,就可以输出更多的电量,从而提高充电效率。
理论上讲,使用MPPT 控制器的太阳能发电系统会比传统的效率提高50%,但是跟据我们的实际测试,由于周围环境影响与各种能量损失,最终的效率也可以提高20%-30%。
从这个意义上讲,MPPT太阳能充放电控制器,势必会最终取代传统太阳能控制器MPPT控制器主要功能:检测主回路直流电压及输出电流,计算出太阳能阵列的输出功率,并实现对最大功率点的追踪。
太阳能控制器方案1. 引言随着能源需求的不断增长和对可再生能源的重视,太阳能发电逐渐成为一种受欢迎的选择。
太阳能控制器是太阳能发电系统中的重要组成部分,主要用于管理太阳能电池板的充电和保护电池。
本文将详细介绍一个太阳能控制器方案,包括基本原理、硬件设计和软件开发等方面。
2. 基本原理太阳能控制器的基本原理是通过对太阳能电池板的输出电压进行监测和控制,从而实现对电池的充电和保护。
当太阳能电池板输出的电压高于一定阈值时,太阳能控制器将电池连接到电池组并开始充电。
充电过程中,太阳能控制器会实时监测电池的电压和电流,以避免过充和过放。
当太阳能电池板输出的电压低于一定阈值时,太阳能控制器将断开电池与电池组的连接,以保护电池不被过放。
3. 硬件设计3.1. 太阳能电池板接口太阳能电池板通过一个标准的直流电源接口与太阳能控制器相连接。
这个接口应包括正负两个接线端子,以便与太阳能电池板的输出端口连接。
3.2. 电池组接口太阳能控制器通过一个额外的接口与电池组相连接。
这个接口应包括正负两个接线端子,以便与电池组连接。
接线端子应具备防反接保护功能,以避免电池组被误接。
3.3. 控制电路太阳能控制器应包括一个控制电路,用于实现对太阳能电池板和电池组的连接和断开控制。
控制电路应具备快速响应和精确控制的特性。
3.4. 充电保护电路太阳能控制器应配备一个充电保护电路,用于监测和控制电池的充电过程。
充电保护电路应具备过充和过放保护的功能,以保障电池的使用寿命和稳定性。
3.5. 显示与操作界面太阳能控制器应配备一个显示与操作界面,用于实现对太阳能控制器的监测和操作。
显示与操作界面可以采用液晶显示屏和按键等元件,以方便用户操作和查看相关信息。
4. 软件开发太阳能控制器的软件开发应包括以下几个方面:4.1. 控制算法设计太阳能控制器的控制算法应根据太阳能电池板和电池组的特性进行设计。
控制算法应具备高效率和稳定性的特点,以提高太阳能电池板的发电效率和电池的使用寿命。

简易太阳能控制器的制作方法制作简易太阳能控制器可以通过以下步骤进行:
1. 收集材料,你需要准备一个太阳能电池板、一个充电控制器、一个12V直流电池、一根电线、一个电池盒和一个开关。
2. 连接太阳能电池板,首先,将太阳能电池板的正负极分别连
接到充电控制器的对应端子上。
确保连接牢固,避免接触不良。
3. 连接充电控制器和电池,将充电控制器的输出端连接到12V
直流电池的正负极上。
同样地,确保连接牢固,避免接触不良。
4. 安装开关,将开关安装在电路中,用于控制电池和负载的连
接和断开。
这可以帮助你手动控制太阳能电池板对电池的充电。
5. 安装电池盒,将12V直流电池放入电池盒中,并将电池盒与
充电控制器连接。
6. 测试,确保所有连接都牢固可靠后,进行一次系统的测试,
检查太阳能电池板是否能够正常充电电池,并且电池能够为负载供
电。
以上就是制作简易太阳能控制器的基本步骤。
当然,这只是一个简单的DIY版本,如果需要更复杂的控制功能,可能需要使用专业的太阳能控制器设备。
希望这些信息能帮到你。
目录摘要 (I)Abstract (II)第一章:绪论1.1 太阳能热水器的发展概况及市场竞争分析1.2 太阳能热水器的应用及意义第二章:太阳能热水器的组成及工作原理2.1 系统总体结构设计2.2 太阳能热水器组成及原理2.3 主要芯片的结构与特点2.3.1 DS12887实时时钟芯片简介2.3.2 80C51单片机结构特点2.3.3 数字温度传感器DS18B20主要特性及测温原理第三章:太阳能热水器硬件设计3.1 太阳能控制器硬件结构3.2 控制器实时时钟接口电路设计3.3 水位检测和温度检测接口电路设计3.4 看门狗和复位接口电路设计3.5 键盘和显示接口电路设计3.5.1 键盘电路3.5.2 显示接口电路3.6 光电隔离与辅助加热电路设计第四章:控制器的软件设计结束语参考文献致谢附录太阳能热水器智能控制器的设计摘要太阳能热水器以其诸多的优点受到人们的欢迎。
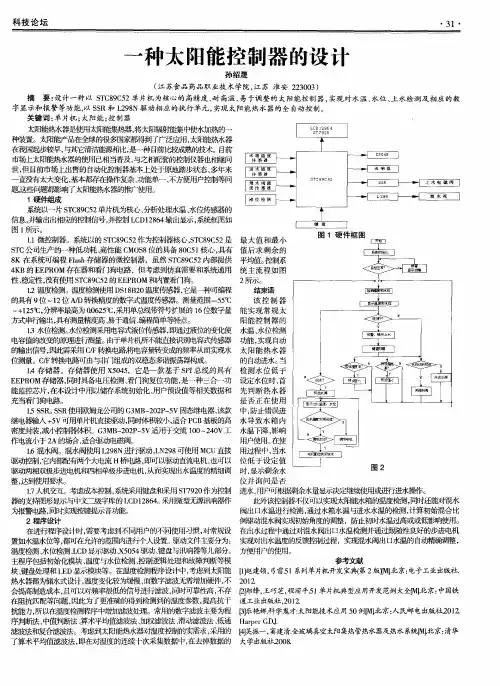
本文结合实际太阳能热水器的具体应用,在介绍太阳能、传感器、单片机的特点基础上,详细描述了太阳能热水器的工作原理和设计方案。
这里根据太阳能热水器对控制器的要求与特点,提出了一种基于DS12887的太阳能热水器智能控制器的设计方法,给出了系统硬件设计及软件实现方法。
全文分三大部分。
第一部分包括第一章,描述太阳能的利用和前景发展状况。
第二部分包括第二章,描述太阳能系统组成及工作原理。
第三部分包括第三、四章硬件设计及电路原理和软件设计,分别介绍了传感器的特点及应用、一般的太阳能热水器及循环系统、单片机发展和原理,这也是此款太阳能热水器的理论基础和必要前提。
关键词:太阳能热水器;传感器; 模糊控制; 实时时钟;单片机Design of intelligent controllerfor Solar Water HeaterAbstractSolar Water Heater is popular with its pretty benefits, Based on author’s real experience on Solar Water Heater design, this article describes the working theory of this solar water hearer after introducing the characters of solar、sensor、Single Chip Microcomputer(SCM).According to the request and characteristicof Solar Water heater for the controller. Providing a design of Intelligent Con- troller for Solar Water heater based on DS12887. Sum up a design way of the system’s hardware and software.This article is divided into 3 parts. Part One is Chapter 1,including the use and perspective of solar energy. Part Two, including Chapter 2, describing the including and the theory of this solar water heater. Part three, including Chapter 3,Chapter 4: the design of hardware and software、the theory of the circuit. Separately introducing the characters and use of transducer, common solar water heater and cycle system, the development and theory of Single Chip Microcomputer(SCM),which are the basic theory and necessary precondition.[Key Words]:Solar Water Heater、Sensor、Vague control、Real clock、Single Chip Microcomputer(SCM).第一章:绪论1.1太阳能热水器的发展概况及市场竞争分析目前,中国已成为世界上最大的太阳能热水器生产国,年产量约为世界各国之和,已有一百多家太阳能热水器生产厂。
www�ele169�com | 77电子基础0 引言太阳能是一种清洁、高效并且永不衰竭的新能源,应用前景十分广阔。
然而,太阳能迄今为止仍未得到大规模的应用,其中主要的原因是太阳能的光转换效率较低,太阳能电池材料的制作成本较高,导致太阳能的发电成本远远高于石油、煤炭等常规能源。
因此,开发转换效率高、成本低的新材料,以及提高太阳能发电效率是目前推广太阳能发电的主要手段,而提高太阳能发电效率的方法之一就是进行高效的太阳光追踪。
2016 年,我国颁布的《国家创新驱动发展战略纲要》中明确提出“加快太阳能等清洁能源和新能源技术开发、装备研制及大规模应用。
”因此,本文旨在设计一款太阳能电池板追光控制系统,实时地跟踪太阳方位,使太阳能电池板以最佳入射角接受最大光强的太阳光照射,提高太阳能的利用效率。
系统能自动识别气象状况,智能的切换跟踪模式。
1 系统总体设计方案基于STM32的太阳能电池板智能追光控制系统的原理框图如图1电路、传感器检测电路、显示电路和Wi-Fi 模块构成。
其中传感器检测电路包括光电传感器、光强度传感器、风速传感器和温湿度传感器等。
系统通过光电传感器获取太阳能光伏板四个方位光照信息,经过滤波、放大等预处理后,输入至单片机控制电路,利用模糊PID 算法对光照强度的变化进行计算,输出信号控制步进电机调整电池板的姿态,实现实时追光。
系统还可以通过温湿度传感器、风速传感器等采集环境参数,从而判断天气情况,在阴天等光强度达不到阈值或大风大雨等极端天气情况下,系统自动停止追踪。
同时将传感器采集到的数据输出至显示电路,通过Wi-Fi 模块与客户端手机进行通信。
太阳能光伏板步进电机垂直/水平单片机控制电路传感器检测电路手机Wi-Fi 模块显示电路图1 系统原理框图2 系统硬件电路的设计■2.1 单片机控制电路单片机控制电路主要采用STM32F103C8T6。
该单片机是一款基于Cortex-M3内核的32位微控制器,程序存储器容量为64KB,最大工作速率可达到72M,片内具有定时器、模数转换、串口、PWM 等丰富的资源,且自带12位高精度AD 转换器,完全能够达到系统采集数据的精度要求。
本科毕业论文(设计)太阳能智能追光系统的设计摘要在太阳能发电系统中,如何将太阳能电池板的发电效率调节至最大状态,并克服太阳能发电效率低、能量不连续、工作不稳定的缺点,成为当前太阳能发电系统研究的重点。
太阳能的强度和方向不确定性,及光照间歇性等特点,给太阳能的收集带来了一定难度,传统的固定式太阳能残疾系统没有充分利用太阳的能量,吸收效率相对较低。
因此,太阳位置的自动追踪技术的研究,智能调节方向的太阳能支架的制作,对于提高太阳能的吸收效率,高效合理的利用太阳能,具有重要的研究价值。
本设计通过控制芯片对传感器的信号进行实时处理,驱动各个控制电机工作,实现对于太阳位置的实时更新,目的是为提高太阳能的收集效率,改善太阳能产品的利用程度。
关键词:太阳能,光敏电阻,89C52芯片,自动追踪技术The Design Of Solar Intelligent T racking Light SystemAuthor:Liu hai fengTutor: Bai xiao leiAbstractDuring the study of the solar power system ,the current major point is how to adjust the g enerating efficiency to an ultimate state and overcome the shortcomings of low efficiency,disc ontinuity of energy and operating instability.The uncertainty of both solar intensity and light d irection as well as illumination intermittent make it more difficult to collect solar energy.Beca use traditional fixed solar collection system doesn`t make full use of solar energy ,the absorpti on efficiency is low relatively.Hence,to research the technology of automatic tracking system for sun position and the pruduction of the solar holder to adjust direction intelligently is of gre at value for improving the absorption efficiency so as to utilize the solar energy properly and efficiently.The design of the sensor signal in real-time processing through controling chip, and to drive the control of motor wok.In order to update in real time the position of the sun for solar energy collection efficiency and improve the degree of utilization of solar energy products.key words:solar energy,photoresistance,89C52, the technology of automatic tracking system目录1绪论 (1)1.1 太阳追光系统的发展现状 (1)1.2 太阳能追光系统的设计思想 (1)1.3 太阳能智能追光系统的研究意义 (1)1.4 研究目标、研究内容和拟解决的关键问题 (2)2硬件设计 (3)2.1 主控制器 (3)2.1.1 主控制器的选用 (3)2.1.2 控制器的介绍 (3)2.2 驱动元件 (4)2.2.1 直流电机与步进电机的比较 (4)2.2.2 步进电机控制原理 (5)2.3 输入模块 (6)2.3.1 电压比较器 (6)2.3.2 光敏电阻 (6)2.4 硬件结构框图与原理图 (8)2.4.1 系统整体结构框图 (8)2.4.2 整体硬件原理图 (8)3方案研究 (9)3.1 基于挡板的传感部分方案 (9)3.2 接收系统方案 (10)4系统软件设计 (11)5智能追光算法 (12)6仿真与实验调试 (15)6.1 Protues仿真 (15)6.1.1 仿真原理 (15)6.1.2 软件仿真及调试 (15)6.1.3 仿真结果 (16)6.2 实验调试 (16)6.2.1 硬件调试 (16)6.2.2 解决过程 (17)6.3 PCB制版 (17)结束语 (18)参考文献 (19)致谢 (20)附录 (21)附录A:程序清单 (21)附录B:电路原理图 (24)附录C:PCB图 (25)附录D:实物照片 (26)1绪论太阳能既是一次能源,又是可再生能源。
• 191•随着我国经济水平的不断提高,民众对生活质量的追求也在不断进步,对于现代家庭而言,热水器成为了必备的生活电器。
目前市面上的电器主要是电热水器、燃气热水器以及太阳能热水器。
就能源节约性能而言,太阳能热水器占据了绝对优势,这也将其功能单一且操作繁琐的劣势暴露出来。
为解决这些现象,我们对基于单片机的太阳能热水器进行分析研究,在控制系统设计方面寻找更好的设计方案。
引言:太阳能热水器设计是以单片机AT89C52为核心控制器,通过该控制器将监测的水位、水温等信息进行运算处理,传送到单片机中。
单片机的工作机制会生成两方面的工作指令。
一是将检测到的基础信息在可视化框中显示出来,使使用者直观的了解到水温与存水量。
二是将现有的水温水量等数据进行运算比较,根据运算的结果与标准值比对后下达工作指令,保证热水器的正常工作。
1 系统设计1.1 系统的设计理念针对单片机的太阳能热水器,我们采取自动控制系统,对水温、水位等数据进行监测,以确保其正常工作。
1)水温显示针对常规的太阳能热水器而言,一般会在点阵型液晶模块中显示水温,水温的标准范围一般在0摄氏度到99摄氏度之间,而针对这种电子类产品,我们没有办法十分精确,所以允许存在几摄氏度的误差。
2)水位显示与水温显示相同的,热水器的存水量也是可以检测的。
对目前市面上的太阳能热水器控制系统产品,本设计精度更高,水温、水位显示更详细。
1.2 硬件设计太阳能热水器因利用节约型能源太阳能进行工作被认可,另外因其有无污染、使用方便、节约能源且经济成本低的优势,所以许多家庭选择太阳能热水器作为家庭使用的重要电器。
本文中,单片机的太阳能热水器通过单片机AT89C52为核心控制器将监测的水位、水温等信息进行运算处理,传送到单片机中。
单片机的工作机制会生成两方面的工作指令。
一是将检测到的基础信息在可视化框中显示出来,使使用者直观的了解到水温与存水量。
二是将现有的水温水量等数据进行运算比较,根据运算的结果与标准值比对后下达工作指令,保证热水器的正常工作。
太阳能路灯控制器设计课程设计课程设计说明书第1页太阳能路灯控制器设计摘要为了提高太阳能光伏控制器的性价比,设计了运用单片机的太阳能光伏控制器。
本控制器具有效率高、可靠性高、运行稳定、性价比高、适宜批量生产的特点。
控制器实现了基于单片机PIC16F711的工作状态控制和蓄电池能量管理,满足了太阳能光伏控制器在不同工作状态下的稳定运行与准确切换的要求。
蓄电池充放电精确控制也在此控制器中得到实现。
实验结果表明,应用此控制器的太阳能光伏系统效率高、运行稳定,蓄电池寿命也可延长。
关键词:太阳能,单片机,充放电电路,锂蓄电池课程设计说明书第2页1 绪论1.1 课题背景能源是经济、社会发展和提高人民生活水平的重要物质基础,能源问题是一个国家至关重要的问题。
随着科学技术和全球经济地飞速发展,对能源的需求也在日趋增长。
自20世纪70年代的世界石油危机以来,人们才真正意识到,化石燃料的储量是有限的,能源危机迫在眉睫。
从全球来看,已探明的可支配的传统能源储量在不久的将来即将耗尽,能源问题的突出,不仪表现在常规能源的匮乏不足,更重要的是化石能源的开发利用对牛态环境的污染破坏:大气中的颗粒物和二氧化硫浓度增高,局部地区形成酸雨。
而每年排放的大量二氧化碳带来的温室效应,使全球气候变暖,自然灾害频繁。
常规能源在给人类社会带来飞速发展的同时,也在很大程度上使人类社会面临着前所未有的困难和挑战。
这些问题最终将迫使人们改变能源结构,依靠科技进步,大规模地开发利用可再生洁净能源,实现可持续发展。
光伏发电具有取之不尽且无污染等优点,日前在我国,光伏发电主要应用在如下领域:西部偏远地区电力供应、通讯及交通设施、气象台站、航标灯和照明路灯。
光伏发电的照明路灯应月J具有节能性、经济性和实川性等优点,在众多应用领域中具有最广泛的发展前景。
本课题为研制一套独立光伏电源控制器,廊州于LED路灯照明系统。
通常独立照明系统由太阳能电池、蓄电池、充放电控制器和负载LED组成。
基于单片机的光伏板自动跟踪系统设计1. 引言1.1 研究背景光伏发电是利用太阳能作为能源,通过光伏板将阳光转化为电能的一种可再生能源。
随着环境保护意识的提高和能源需求的增加,光伏发电在近年来得到了广泛的应用和推广。
由于太阳光的角度和强度会不断变化,不同时间和地点阳光的照射角度也会有所不同,这就导致了光伏板的效率无法得到最大化利用。
针对光伏板效率低的问题,许多研究人员开始关注光伏板自动跟踪系统的设计与研究。
这种系统能够根据太阳光的方位和强度自动调整光伏板的角度,使其始终与太阳光保持垂直,从而最大化地接收太阳能,提高光伏发电效率。
开发一种基于单片机的光伏板自动跟踪系统具有重要的意义,将有助于提高光伏发电的效率和稳定性,减少能源浪费,推动可再生能源的发展。
【2000字】1.2 研究目的研究目的旨在探究基于单片机的光伏板自动跟踪系统设计的实现方法,通过对光伏板的自动跟踪系统进行设计和实践,提高光伏发电系统的光电转换效率,减少能源浪费,推动清洁能源的发展。
具体目的包括:一是了解光伏板自动跟踪系统的工作原理和技术特点,为系统设计提供理论支撑;二是研究系统的硬件设计,通过合理的电路连接和传感器布置,确保光伏板能够根据太阳光的方向进行自动转向;三是深入分析系统的软件设计,编写程序实现光伏板的自动跟踪功能,保证系统稳定运行;四是进行系统测试,验证自动跟踪系统的可靠性和准确性;五是进行性能评价,比较自动跟踪系统与固定安装系统的发电效率,验证系统设计的优劣。
通过实验和评价,全面了解基于单片机的光伏板自动跟踪系统设计的可行性和优劣,为清洁能源领域的研究和应用提供参考和借鉴。
1.3 研究意义光伏板自动跟踪系统的设计与研究具有重要的意义。
该系统可以提高光伏板的效能和发电效率,通过跟踪太阳光线的运动,始终保持最佳的接收光照角度,从而最大程度地利用太阳能资源。
光伏板自动跟踪系统可以减轻人工维护的工作量,节省人力成本,并且提高系统的稳定性和可靠性。
太阳能跟踪控制器设计
摘要:本文对太阳能跟踪系统进行了自动跟踪系统控制部分设计。
系统采用光电检测追踪实现对太阳光线的跟踪,从而提高太阳能的利用效率。
关键词:太阳能;跟踪;光敏电阻;单片机;步进电机
中图分类号:tm615 文献标识码:a 文章编号:1674-7712 (2013)08-0000-01
一、太阳能自动跟踪系统总体设计
(一)光源检测方案的确定
1.视日运动轨迹跟踪
不论是采用极轴坐标系统还是地平坐标系统,太阳运行的位置变化都是可以预测的,通过数学上对太阳轨迹的预测可完成对日跟踪。
在设定跟踪地点和基准零点后,控制系统会按照太阳的地平坐标公式自动运算太阳的高度角和方位角。
然后控制系统根据太阳轨迹每分钟的角度变化发送驱动信号,实现跟踪装置两维转动的角度和方向变化。
在日落后,跟踪装置停止跟踪,按照原有跟踪路线返回到基准零点。
优点:精度高,不受环境因素影响,但是不同地区需要设置不同的初始值,。
缺点:系统复杂,但是不同地区需要设置不同的初始值,太过于复杂。
2.光电跟踪
光线在同种均匀介质中沿直线传播,不能穿过不透明物体而形成的较暗区域,形成的投影就是常说的影子,地球每天不停的自转,同时它要围绕太阳作公转,因此,地球和太阳的相对位置是在不停的变化,太阳光照射在地球上的影子也随之变化。
因此,如果在地球上的某个位置放置一个不同透光的物体,那么,这个物体在太阳光的照射下就会产生影子,而这个影子的长度也会随太阳和地球空间位置的相对变化而产生变化。
我们将影子的变化转换为电压的变化,并且通过调节机械部分来调节影子的变化从而达到调节电压的变化达到我们的目的,这样也可以构成一个闭环系统。
这样一来我们就考虑用光敏行性器件来检测太阳的变化从而实现光电跟踪。
优点:成本低,思路简单,容易实现。
缺点:容易受阴天雨天的影响。
3.采集传感器的选择
方案一:采用光敏电阻作为轨迹的采集器件。
光敏电阻的值能随光强的变化而变化,光敏电阻的测量灵敏度较高。
方案二:采用高灵敏度的光敏二极管作为轨迹的的采集器件。
光敏二极管产生的电流小,灵敏度较低,响应速度较慢。
方案三:光敏三极管灵敏度高,但是容易达到饱和区,影响检测。
综合考虑,为了提高系统的灵敏度,我们选择第一种方案。
二、控制器部分
(一)单片机的选择
因为检测电路得到的信号为模拟信号,为了电路的简化,我们选用带有模数转换的单片机,在设计中我选择了stc12c5410ad单片机,stc12c5410系列单片机是单时钟/机器周期(1t)的兼容8051内核单片机,是高速/低功耗的新一代8051单片机,指令代码完全兼容传统8051。
8路高速10位a/d转换。
工作电压:5.5v~3.8v(5v 单片机),工作频率范围:0~35mhz,用户应用程序空间10k字节,e2prom功能。
运用stc12c5410ad单片机的输入/输出接口p1.0定时采集差动运算放大电压信号环用p1.1采集环境光强电压信号和,分别将这些数据存储于数据存储器中,在程序中会用到。
stc12c5410ad单片机片内的时钟产生方式采用的是内部时钟方式,即在xlat1和xlat2两引脚间外接石英晶体和电容构成一个自激振荡器,从而向内部时钟电路提供振荡时钟。
震荡器的频率主要取决于晶体的振荡频率,一般晶体可在1.2~12mhz之间任选。
通过改变电容c1、c2的值进行微调,通常取30pf左右。
本设计中晶体的振荡频率取11.0592mhz,电容的值取30pf。
控制部分是最核心的部分,控制部分是要将采集信号部分和可控制电机部分相连接的部分。
(二)a/d转换程序的设计
因为太阳能电池板和太样垂直后,电机停止转动,而太阳还在运动这样就会使采集信号发生变化,如果立即进行更正,电机就需要转动,这样一来电机频繁的转动,一方面能量损耗较大另一方面会影
响电机的寿命和机械部分的寿命。
所以允许有一定的误差,这样能保证系统正常的工作,也能提高电机和机械部分的寿命。
太阳能电池板和太阳垂直时,差动运放电路的输出的电压是2.5v,经过实际实验,当太阳能电池板和太阳光线夹角超过2度是,电压变化是0.2v,这样一来我们就可以设置一个范围,当电压值大于2.7v是电机正传,当电压小于2.3v时,电机反转,当电压小于2.7大于2.3是电机不转,延时后在进行判断。
带有模数转换的单片机将0v到5v电压进行转换为0—255,这样一来我们只需将转换的数字量与不同电压范围对应的数字量进行比较就可以实现自动跟踪。
其中延时程序一是因为在黑夜有外部光源影响,系统判断失误使太阳能电池板转动,但是当影响光源消失后系统又自动复位,这样会减少系统寿命和浪费能量,所以当光强达设定的阀值上限后,延时2分钟,判断光强是否还在阀值上限,如果在那么可以认定天亮了,在这以后再让系统工作就可以更合理。
设定延时程序二是因为当太阳能电池板调整的和太阳管线垂直后,为了使电机不过于频繁的工作而设定的,因为太阳相对于地面1小时转动15度,也就是4分钟转一度,所以延时1分钟,和上边的2分钟一起共3分中检测一次,这样可以保证尽量的去掉非太阳光的光源影响,太阳落山后,光强低于阀值,延时后系统给步进电机固定的脉冲,是系统缓慢的复位,这样可以使系统更佳合理的运行。
(三)控制步进电机电路
以太阳能电池板为例,固定形式的太阳能电池板一天7小时的发电
量为1200w左右,其他形式可转动的发电装置一天的发电量可以达到1600w,提高了30%,所以太阳能跟踪控制器设计在太阳能利用方面有很大的前景。
四、结语
本文设计了基于单片机的太阳照射角度的自动跟踪系统,该系统能够实现对太阳的双向跟踪(东西向、南北向)。
参考文献:
[1]李申生.太阳能[m].北京:人民教育出版社,1988:12-14.
[2]王炳忠.太阳能—未来能源之星[m].北京:高教出版社,1990:20-21.
[3]练亚纯.太阳能的利用[m].北京:人民出版社,1975:24-25.
[4]牛昱光.单片机原理[m].北京:电子工业出版社,2008:224-231.。