第3章有限变形讲解
- 格式:doc
- 大小:844.00 KB
- 文档页数:14
第三章 杆件受力变形及其应力分析§3-1 概 述一、构件正常工作的基本要求为了保证机器或工程结构的正常工作,构件必须具有足够的承受载荷的能力(简称承载能力)。
为此,构件必须满足下列基本要求。
1畅足够的强度例如,起重机的钢丝绳在起吊不超过额定重量时不应断裂;齿轮的轮齿正常工作时不应折断等。
可见,所谓足够的强度是指构件具有足够的抵抗破坏的能力。
它是构件首先应满足的要求。
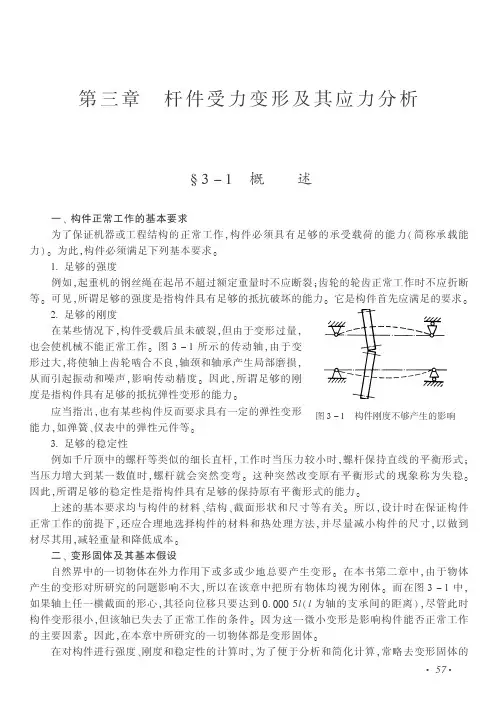
图3-1 构件刚度不够产生的影响2畅足够的刚度在某些情况下,构件受载后虽未破裂,但由于变形过量,也会使机械不能正常工作。
图3-1所示的传动轴,由于变形过大,将使轴上齿轮啮合不良,轴颈和轴承产生局部磨损,从而引起振动和噪声,影响传动精度。
因此,所谓足够的刚度是指构件具有足够的抵抗弹性变形的能力。
应当指出,也有某些构件反而要求具有一定的弹性变形能力,如弹簧、仪表中的弹性元件等。
3畅足够的稳定性例如千斤顶中的螺杆等类似的细长直杆,工作时当压力较小时,螺杆保持直线的平衡形式;当压力增大到某一数值时,螺杆就会突然变弯。
这种突然改变原有平衡形式的现象称为失稳。
因此,所谓足够的稳定性是指构件具有足够的保持原有平衡形式的能力。
上述的基本要求均与构件的材料、结构、截面形状和尺寸等有关。
所以,设计时在保证构件正常工作的前提下,还应合理地选择构件的材料和热处理方法,并尽量减小构件的尺寸,以做到材尽其用,减轻重量和降低成本。
二、变形固体及其基本假设自然界中的一切物体在外力作用下或多或少地总要产生变形。
在本书第二章中,由于物体产生的变形对所研究的问题影响不大,所以在该章中把所有物体均视为刚体。
而在图3-1中,如果轴上任一横截面的形心,其径向位移只要达到0畅0005l (l 为轴的支承间的距离),尽管此时构件变形很小,但该轴已失去了正常工作的条件。
因为这一微小变形是影响构件能否正常工作的主要因素。
因此,在本章中所研究的一切物体都是变形固体。
在对构件进行强度、刚度和稳定性的计算时,为了便于分析和简化计算,常略去变形固体的·75·一些影响不大的次要性质。
3.9 变形与形变监测知识点1概述(一)变形与形变监测变形是物体在外来因素作用下产生的形状和尺寸的改变。
变形分为变形体自身的形变(伸缩、错动、弯曲和扭转)、变形体的刚体位移(整体平移、整体转动、整体升降和整体倾斜)两类,一般称前者为形变,称后者为变形。
变形监测(亦称变形测量、变形观测)指利用测量仪器或专用仪器对变形体的变化状况进行监视、监测的测量工作。
形变监测指对地壳或地面的水平和垂直运动所进行的变形监测工作。
其目的是监测地震前兆或评价区域构造的稳定性。
变形监测是通过测量位于变形体上有代表性的离散点(变形观测点)的变化来描述变形体的变形。
变形监测分静态变形监测和动态变形监测,静态变形通过周期观测得到,动态变形通过持续监测得到。
(二)变形监测对象主要包括:城市、工矿区等地面沉降监测(亦称地面形变监测)和工程建(构)筑物三维变形监测、滑坡体滑动监测等。
目前,最具代表性的变形体主要有高层建筑、大坝、桥梁、隧道、边坡、矿区地表等。
(三)变形监测特点(1)重复观测;(2)精度要求较高;(3)测量方法综合应用;(4)数据处理要求严密。
(四)变形监测内容变形监测包括几何量监测和物理量监测。
几何量监测内容主要包括水平位移、垂直位移和偏距、倾斜、挠度、弯曲、扭转、震动、裂缝等测量。
物理量监测内容主要包括应力、应变、温度、气压、水位、渗流、渗压、扬压力等测量。
知识点2变形监测方案设计(一)基本技术要求1.设计要求工作开始前,应收集相关的地质和水文资料及工程设计图纸;变形监测一般采用国家坐标系统和高程基准,或测区原有的独立坐标系和高程基准,较小规模的监测工程,也可采用假定坐标系和高程基准;变形监测网一般应进行同时顾及精度、可靠性、灵敏度及费用准则的优化设计;变形监测一般采用GB50026-2007《工程测量规范》、JGJ8-2007《建筑变形测量规范》作为技术标准。
2.观测要求各观测周期的变形监测应满足的要求是:①在较短的时间内完成;②采用相同的观测路线和观测方法;③使用同一仪器和设备;④观测人员相对固定;⑤记录相关的环境因素,包括荷载、温度、降水、水位等;⑥采用统一基准处理数据。

第三章杆件的基本变形第三章杆件的基本变形(共计10课时)杆件:长度远⼤于横截⾯尺⼨的构件。
(4课时)变形:杆件在外载荷的作⽤下可能发⽣尺⼨和形状的变化,称为变形。
⼀、内⼒与截⾯法1、内⼒概念:杆件在外⼒作⽤下,产⽣变形,其内部相互间的作⽤⼒,称为内⼒。
2、求内⼒的⽅法:截⾯法步骤:(1)截:在需求内⼒的截⾯处,沿该截⾯假想地把构件切开;(2)取:选取其中⼀部分为研究对象;(3)代:将弃去部分对研究对象的作⽤,以截⾯上的未知内⼒来代替;(4)平:根据研究对象的平衡条件,建⽴平衡⽅程,以确定未知内⼒的⼤⼩和⽅向;例题:以拉伸和压缩为例应⽤截⾯法求内⼒⼆、分四种情况受⼒(拉伸和压缩、剪切、扭转、弯曲)情况进⾏研究从四⽅⾯进⾏研究(受⼒特点、变形特点、内⼒计算、应⼒计算)(⼀)拉伸和压缩1、受⼒特点:作⽤于杆件上的外⼒合⼒的作⽤线沿杆件轴线。
2、变形特点:沿轴线⽅向产⽣纵向深长或缩短。
3、内⼒计算:(1)内⼒沿杆件轴线的拉⼒或压⼒,⼜称轴⼒;(2)计算:应⽤截⾯法见例题3、应⼒计算(1)轴⼒为拉⼒时,为拉应⼒,轴⼒为压⼒时,为压应⼒。
通常以正号表⽰拉应⼒,负号表⽰压应⼒。
(2)计算:σ=FN/Aσ:横截⾯上的应⼒FN:横截⾯上的轴⼒A:横截⾯⾯积4、许⽤应⼒和安全系数对于塑性材料:[σs ]=σs/n对于脆性材料[σb ]=σb/n5、拉伸与压缩时的强度校核σmax =F Nmax/A≤[σ](⼆)剪切和挤压(2课时)⼀、剪切1、受⼒特点:作⽤于杆件两侧⾯上外⼒的合⼒⼤⼩相等、⽅向相反,且作⽤线相距很近。
2、变形特点:杆件延两⼒作⽤的截⾯发⽣相对的错动。
3、内⼒计算(1)在外⼒作⽤下使零件发⽣剪切变形,零件内部产⽣⼀个抵抗变形的⼒,称为剪⼒。
(2)计算:应⽤截⾯法例题3-44、切应⼒(1)切应⼒τ表⽰延剪切⾯上应⼒分布的程度,即单位⾯积上所受到的剪⼒。
⼀般近似认为:剪切⾯上的应⼒分布是均匀的,其⽅向与剪切⼒相同。
第3章 有限变形§3.1 有限变形这时说的变形,除连续性条件外,没有其余任何条件。
小变形:小位移,小转动,小应变,)(21)(21,,,,i j j i ij i j j i ij u u u u +=-=εω有限变形:大位移,大转动,大应变对于一个微小六面体:小变形下变为一个平行六面体 有限变形下仍变为一个平行六面体 这一条件不变变形几何学方面来研究变形 四个问题: 1)记录2)什么办法来描述 3)怎么度量4)有没有办法将变形分解§3.2 物体的构形和坐标系物体:连续介质,变形前用0K 代表,变形后物体用t K 代表0K :物体,物质点的集合,被始构形(material configuration); t K :变形后的物体,现时构形(spatial configuration),P :物质点p :空间点,物质点在空间所占的位置。
初始坐标系 ⅢⅡⅠX X X O -k 1现时构形ⅠXⅡXⅢX)(K X P)(kx pXOod2xx 3x1xu现时坐标系 321x x x o -构形:每一瞬时与物质点对应的空间点的集合。
0=t 瞬时,初始构形 0K0K :初始构形,X 点的坐标(K X )t K :现时构形,(瞬时t 的构形),x 点的坐标(k x ) 全部采用直角坐标系§3.3 描写物体运动和变形的方法1. Lagrange 描述法用物质坐标k X 作自变量(描述物体的运动和变形)(,) (,)k k K t x x X t ==x x X研究物质点在不同时刻所对应的空间点(着眼点:跟踪物质点运动状况)2. Euler 描述法用空间坐标k x 作自变量(描述物体的运动和变形)(,) (,)K K k t X X x t ==X X x研究空间点x 处对不同时刻流径这一空间的物质点(着眼点:跟踪在一个空间点上,不同时刻对应的物质点)(前者跟踪同一个人,不同晚上睡不同的床位,后者跟踪同一张床,不同晚上由不同的人去睡)位移点:u=+-u d x X (其中d 不随时间而变,X 也与t 无关)速度和加速度:分两种表述方法 1)Lagrange 法22(,)(,)K K X t tX t t ∂==∂∂===∂X v u x a v u2)Euler 法:(研究流体的流动等)(,)k x t =v v ——流场(,)d(,)d (,) k k k k k kkx t x x t t t x t x t v t x ∂∂∂==+∂∂∂∂∂=+∂∂v v a v v v物质导数=局部导数+迁移导数§3.4 变形梯度有限变形:记录(构形),描述⎩⎨⎧EL,度量(本节研究)物体的有限变形的研究,离不开一点的领域,或取一个线元。
变形前线元:d d K K PQ X ==⋅X E 变形后线元:d d K k pq x ==⋅x ex X d d →经历了一个长度的变化和方向的变化(它们的量都可能是很大的)1)Lagrange 法:物质坐标K X ——自变量p 点:),(t X x x K k k =q 点:),d (d t X X x x x K K k k k +=+求d x :K KkK k K K k k X X x t X x t X X x x d ),(),d (d ⋅∂∂=-+= K K k k X X x x d d ∂∂=表示d x 和d X 的关系(可见Kk X x∂∂的重要性) KkX x ∂∂称为物质变形梯度张量F (称为“物质”的理由是物质坐标下的)。
即 K k Kk kKx X x F ,简写=∂∂= d d d d k kK K x F X ==x F X 变形前后线元之间的关系(包含了长度和方向) (*)x Ⅰ2变形前d x (方向、长度)变形后d x (方向、长度)下面验证F 是一个二阶张量km lm kl m l kl m l kl m k KM M m m k K k q q x xq x x q x x X X X x x x X x ==∂∂=∂∂=∂'∂'∂∂⋅∂∂⋅∂'∂='∂'∂δ类似KM KMQ x X ='∂∂ 即 T'=⋅⋅F q F Q∴F 为二阶张量,关系到两个坐标系,称为两点张量。
kk K Kx X ∂=⊗∂F e E F 对应于一个线性变换,(从(*)式看),包含了方向和长度的变换。
由此可见,F 包含了全部的有限变形信息。
Grad ∂==∂xF x X(所以称为变形“梯度”) kK k K F =⊗e E kk K Kx X ∂=⊗∂e E (各种不同的写法) r '=F qFQ2)Euler 法:用空间坐标k x ——自变量,t 作参变量。
P 点(与p 对应的物质点):),(t x X X k K K =Q 点(与q 对应的物质点):),d (d t x x X X X k k K K K +=+ k kKK x x X X d d ⋅∂∂=(知道现在线元,倒回去查原来的线元) 对应于一个由k x d 的线性变换。
空间变形梯度张量:1-F( 以空间坐标为自变量)1,grad K K k K k K k kX Xx -∂∂===⊗=⊗∂∂F X E e X E e x 其实,F 与1-F互逆,所以以1-F定义。
§3.5 变形张量回顾变形梯度张量:,d d =F x F X 包含了全部信息变形张量只研究其长度改变的信息(不包含方向改变) 1)Lagrange 描述法:K X 作为自变量 变形前d X 的长度2d :(d )d d K K L L X X =⋅ 变形后d x 的长度2d :(d )d d d d k k kl k l l l x x x x δ=⋅=⋅上述K X d 应该是已知的,k x d 可求出的。
则LK L l K k kl L K lL kK kl L lL K kK kl X X x x X X F F X F X F l d d d d )d )(d ()d (,,2⋅=⋅==δδδL K L k K k X X x x d d dl)(,,2=∴变形张量C (称为Green 变形张量) C 为正定的(0)d (2≥c ),,KL k K k L C x x =→C 为对称张量。
T ,,k K k L K Lx x ==⊗C F FC E E已知变形梯度张量可求出变形张量。
通过C 可直接算出长度的变化(优点)。
2)Euler 描述法:k x 作为自变量变形后的长度l d :k k x x l d d )d (2⋅= (作为已知的) 变形前的长度L d :2,,,,(d )d d d d d d d d K K KL K L KL K k L l k l K k L l k l L X X X X X X x x X X x x δδ=⋅=⋅==Cauchy 变形张量1-B1,,111()()K k K l k l TX X ----=⊗=B e e B F F通过变形梯度张量可求出变形张量。
§3.6 变形梯度张量的极分解变形梯度张量F 。
(若)F 是一个可逆张量,即1-F存在,则F 可写为:=⋅F R U 或 =⋅F V R右极分解 左极分解上述分解存在且唯一的,R 是正常正交张量,表示转动,所以记为R ,U 和V 是对称、正定张量。
1.右极分解的证明若 =⋅F R U 成立,且R 为正交张量,U 为对称正定张量。
T T T T T ()=⋅=⋅=⋅F R U U R U R则 T T ()()=⋅⋅=⋅F F U R R U U U 又 T=F F C 为正定的,对称轴,∴ 由F 可找到U ,且U 为正定、对称的。
又 1-=⋅R F UT 1TT1T111U-----=⋅=⋅⋅⋅=⋅⋅⋅=R U F R R U F F U U U U I∴R 为正交张量。
2.右极分解的唯一性设 ''=⋅=⋅F R U R UT T 2TTT2()()'''==⋅⋅'''''''==⋅=⋅⋅=U R F R R UU U U U U UR R R R U U'∴=U U ,由此可推得 '=R R3. 左右极分解中的R 是相同的。
=F RU 又 *=⋅F V R***T ***T *()()==⋅⋅=⋅⋅F VR R R V R R R V R上式为一右极分解,因为右极分解是唯一的,则*=R R 同时由上式可得:T =⋅⋅U R V R U :右伸长张量 V :左伸长张量 U 和V 是相似张量。
则 T=V RUR§3.7 Lagrange 标架和Euler 标架通过这两个标架的学习了解,,R U V 的几何意义。
=⋅⎧⎨=⋅⎩F R UF V Rd d =⋅x F X F 相当于一个变换。
变形后线元;变形前线元1.右极分解d d d =⋅=⋅⋅x F X R U X将d X 先进行U 变换,再进行R 变换。
U 正定对称二阶张量, 对称张量,存在三个互相垂直的主方向,αM (1,2,3=α)( 正定)对应有三个主值(非负)(111222333α)αα=Λ⊗=Λ⊗+Λ⊗+Λ⊗U M M M M M M M MLagrange 标架:123,,M M M 作为基矢 第一步:(d d α)αα⋅=Λ⊗⋅U X M M Xd d X αα=X M 也按Lagrange 标架分解。
()(d d d X X αααββα)αα=Λ⊗⋅=ΛU X M M M M第二步:d (d )⋅=⋅F X R U X 即 (d d X α)αα=Λx RM 又 (d d X α)αα=Λx m则:αα=⋅m R M (变换后仍为矢量)正交张量:有体内积性质,即,有αM 为单位矢量,正交变换后的αm 仍为单位矢量,但方向改变,且αM 仍为三个互为正交的。
αm 三个相垂直的方向——Euler 标架根据前面两步可知:U 右伸长张量,R 转动张量。
2.左极分解d d d ==⋅⋅x F X V R X第一步:d d X αα⋅=⋅R X R M (保内性质)d X αα=m (长度不变,但投影到Euler 标架上) 第二步:d ?⋅=V R X令TT(α)αα==⋅Λ⊗⋅V RUR R M M Rd (α)α=Λ⊗m mEuler 标架是V 的三个主方向,以123,,m m m 作为基矢。
设(α)αα=λ⊗V m m 则)()Λ=ααλ(∴U 和V 主方向不同,主值相等。