第五章晶闸管可控串联补偿器TCSC
- 格式:pdf
- 大小:4.41 MB
- 文档页数:100

FACTS controllers的总结1.静止无功补偿器SVC(Static Var Compensator)静止无功补偿器的典型代表是晶闸管投切的电容器(TSC-Thyristor Switched Capacitor)和晶闸管控制的电抗器(TCR-Thyristor Control Reactor)。
如果只是将这两种无功补偿器单独使用,它们都有各自的缺点:单独的TCR只能吸收无功功率,而不能发出无功功率;单独的TSC对于抑制冲击负荷引起的电压闪变是不够的。
为了解决这些问题,可以将TCR与并联电容器配合使用,根据投切电容器的元件不同,又可分为TCR与固定电容器配合使用的静止无功补偿器(TCR+FC),和TCR 与断路器投切电容器配合使用的静止无功补补偿器(TCR+MSC),以及TCR与TSC 配合使用的无功补偿器。
这些组合而成的SVC的重要特性是它能连续调节补偿装置的无功功率,可以对无功功率进行动态补偿,使补偿点的电压接近维持不变,但SVC只能补偿系统的电压,并且其无功输出与补偿点节点电压的平方成正比,因而当电压降低时其补偿作用会减弱。
SVC的主要作用是电压控制,但采用适当的控制方式后,SVC也可以有阻尼系统功率振荡和增加稳定性等作用。
2.静止同步补偿器STATCOM(Static Synchronous Compensator)静止同步补偿器也可以称为ASVG(Active staticVar generator)有源静止无功发生器。
它的基本原理是将自换相桥式电路通过电抗器或者直接并联在电网上,适当调节桥式电路交流侧输出电压的幅值和相位,或者直接控制其交流侧电流,就可以使该电路吸收或发出满足要求的无功电流,实现动态无功补偿。
ASVG根据直流侧采用的电容和电感两种不同的储能元件,可以分为电压型和电流型。
无论是电压型,还是电流型的ASVG其动态补偿的机理是相同的。
它可以通过控制其容性或感性电流,与系统交换无功,它的重要特性是输出的无功功率不受系统电压的影响,在任何系统电压的情况下,都能输出额定的无功功率,与SVC相比,在系统故障的情况下静步补偿器维持系统电压、提高系统暂态稳定性和抑制系统振荡的作用较明显。
学院毕业设计(论文)题目:可控串联补偿装置的仿真研究学生姓名:学号:学部(系):机械与电气工程学部专业年级:电气工程及其自动化专业指导教师:职称或学位:年 5 月 25 日目录摘要 (1)关键词 (1)Abstract (1)Key words (2)前言 (3)1.TCSC的基本结构和工作原理 (4)1.1 TCSC的基本结构 (4)1.1.1 TCSC的功能模型 (4)1.1.2 TCSC的器件模型 (4)1.2 TCSC的工作方式和过程 (5)1.3 TCSC数学模型 (8)1.4 TCSC的特性 (9)1.4.1 TCSC装置的V-I特性曲线 (9)1.4.2 TCSC装置的X-I特性曲线 (11)2.TCSC的控制系统研究 (13)2.1系统层控制系统 (13)2.2 中层控制系统 (13)2.2.1开环控制 (14)2.2.2闭环控制 (14)2.2.3 PID控制原理 (15)2.3基于定阻抗控制的TCSC常轨PID控制系统 (16)3.用于TCSC控制系统的CMAC和PID复合控制策略 (17)3.1 CMAC神经网络的基本结构 (17)3.2 CMAC与PID复合控制算法 (20)3.3 仿真实例 (20)4.系统仿真 (22)4.1 TCSC非线性控制系统仿真研究 (22)4.2 基于CMAC和PID复合控制的TCSC控制系统仿真研究 (25)结束语 (28)参考文献 (30)致谢 (31)可控串联补偿装置的仿真研究摘要可控串联补偿(TCSC)通过对晶闸管导通角进行精确快速地控制,以实现对其等值电抗灵活、连续、平滑地调节,因而其为柔性交流输电系统(FACTS)中一种比较成熟和应用较为广泛的技术。
本文综述了TCSC的发展及研究现状,分析总结了TCSC的基本结构、运行原理、工作模式的特点、基频阻抗特性及工作特性。
此外,本文在模糊理论及常规PID阻抗控制的基础上,设计了TCSC模糊PID阻抗控制器。
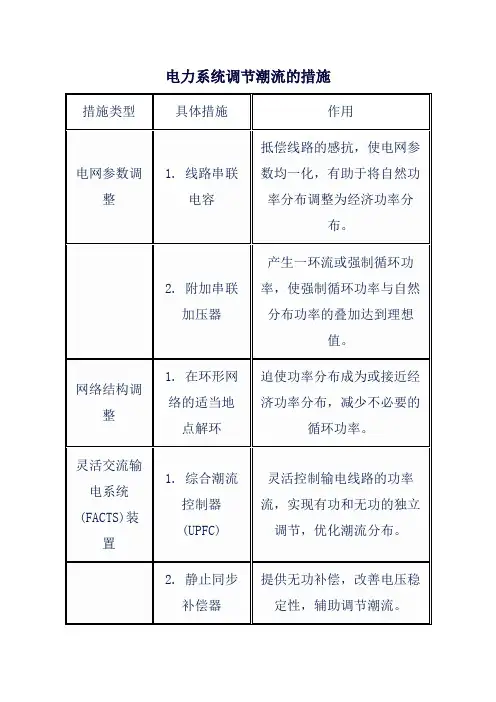
5 静止并联补偿器SVC和STATCOM5.1 并联补偿器的目的通过长期的实践,人们已普遍认识到,通过一定方式可增强线路的稳态传输功率,线路的电压波形也可通过并联适当的无功补偿器得到控制。
无功补偿器的目的就是改变传输线路的自然电气特性,使之能够满足主要负载的需求。
在轻载条件下,一般采用各种并联、固定或机械开关连接的电抗器来减小线路过电压;而在重载条件下,同样也可采用并联、固定或机械开关连接的电容器来维持电压的幅值。
本节将回顾通过理想的并联型无功补偿器来增加传输功率的概念,其目的就是为了对静止无功补偿器的工作原理,以及为了对理解特定目标所采用的控制技术奠定一定的基础。
在传输系统中对感性负荷应用并联补偿的最终目的就是为了增加传输功率,它需要改进稳态传输特性,进而提高系统的稳定性。
在线路的中点应用无功补偿能起到调整电压的作用,在传输线路受端也可采用无功补偿来提高电压的稳定性,同时它还能在暂态电压控制中用来增加暂态稳定性和阻尼功率振荡。
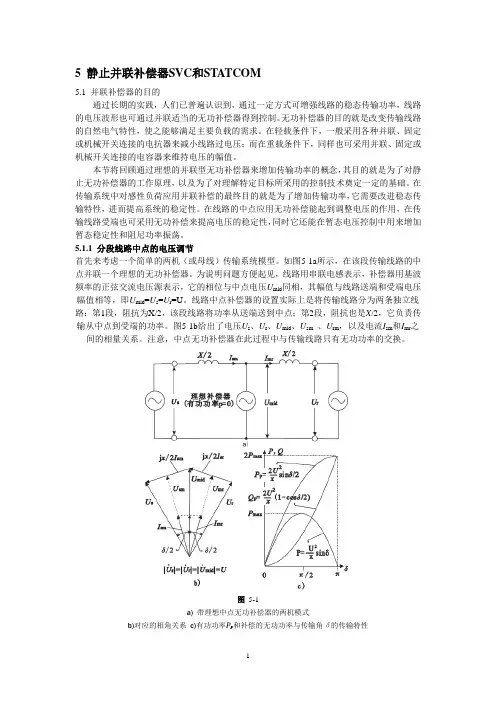
5.1.1 分段线路中点的电压调节首先来考虑一个简单的两机(或母线)传输系统模型。
如图5-1a所示,在该段传输线路的中点并联一个理想的无功补偿器。
为说明问题方便起见,线路用串联电感表示,补偿器用基波频率的正弦交流电压源表示,它的相位与中点电压U mid同相,其幅值与线路送端和受端电压幅值相等,即U mid=U s=U r=U。
线路中点补偿器的设置实际上是将传输线路分为两条独立线路:第1段,阻抗为X/2,该段线路将功率从送端送到中点;第2段,阻抗也是X/2,它负责传输从中点到受端的功率。
图5-1b给出了电压U s、U r、U mid、U sm、U rm,以及电流I sm和I mr之间的相量关系。
注意,中点无功补偿器在此过程中与传输线路只有无功功率的交换。
图5-1a) 带理想中点无功补偿器的两机模式b)对应的相角关系c)有功功率P p和补偿的无功功率与传输角δ的传输特性假设系统为无穷大系统,从图5-1b 中的相量图中容易看出,通过线路上每个端子(送端、中点和受端)的有功功率相同,因此有4sin 4;4cos δδX U I I I U U U mr sm mr sm ===== (5.1) 因此,传输的有功功率为:4cos 4cosδδUI I U I U I U P sm mid mr mr sm sm ==== (5.2a )或 2sin 22δX U P = (5.2b) 根据无功分量的定义及上面相量图的关系,同样可得)2cos 1(24sin 2δδ-==X U UI Q (5-3) 由此可得图5-1c 所示在理想并联补偿情况下的有功功率P 、无功功率Q 和δ角之间的关系。
第五章 晶闸管电路 第一节 晶 闸 管 一、填空题 1、硅晶体闸流管简称 ,俗称 。 2、晶闸管有三个电极: 、 和 。 3、晶闸管是一种大功率半导体器件,它由 层硅半导体组成,中间形成 个PN结。它在电路中的符号是 。 4、晶闸管导通的条件是:在 和 之间加正向电压的同时,在 和 之间也加正向电压。晶闸管导通后, 就失去控制作用,这时晶闸管本身的压降为 左右。 5、要求晶闸管关断必须 或 。 6、根据晶闸管的工作原理,可以将其看成是 型和 型两个晶体三极管的互联。 7、实际使用晶闸管时,应考虑的参数主要有 、 、 和 等。 二、判断题(正确的在括号中打“√”,错误的打“×” ) ( )1、晶闸管和晶体三极管都能用小电流控制大电流。因此,它们都具有放大作用。 ( )2、晶闸管不仅具有反向阻断能力,而且还具有正向阻断能力。 ( )3、晶闸管触发导通后,门极仍具有控制作用。 ( )4、晶闸管门极不加正向触发电压,晶闸管就永远不会导通。 ( )5、晶闸管导通后,若阳极电流小于维持电流IH,晶闸管必然自行关断。 三、选择题(将正确答案的序号填入括号中) 1、晶闸管导通后通过晶闸管的电流决定于( )。 A、电路的负载 B、晶闸管的电流容量 C、晶闸管阳极和阴极之间的电压 2、允许重复加在晶闸管阳极和阴极之间的电压为( )。 A、正反向转折电压的有效值 B、正反向转折电压的峰值减去100V C、正反向转折电压的峰值 3、在晶闸管标准散热和全导通时,允许通过的工频最大阳极电流为( )。 A、半波电流的峰值 B、半波电流的平均值 C、半波电流的有效值 四、问答题 1、晶闸管导通的条件是什么?
2、怎样用万用表区分晶闸管的阳极、阴极和门极?如何简单判别晶闸管的好坏? 3、某晶闸管型号规格为KP200-18F,请说明型号规格中各项所代表的含义。 五、综合题 1、图5-1所示为测试小功率晶闸管的简易方法,电路接好后,电流表有无读数?若用短导线将晶闸管的门极和阴极短接,电流表有无读数?再拿去短接导线,电流表有无读数?为什 么? 2、有效值为220V的交流电,电压最大值是多少?用于220V交流电时,选用耐压300V的晶闸管是否可以?