自控原理9(第九章418-437)
- 格式:ppt
- 大小:9.08 MB
- 文档页数:77
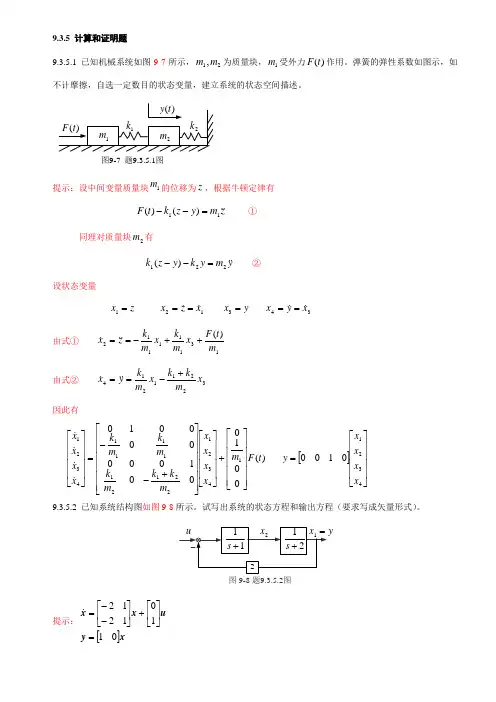
9.3.5 计算和证明题9.3.5.1 已知机械系统如图9-7所示,21,m m 为质量块,1m 受外力)(t F 作用。
弹簧的弹性系数如图示,如不计摩擦,自选一定数目的状态变量,建立系统的状态空间描述。
图9-7 题9.3.5.1图提示:设中间变量质量块1m 的位移为z ,根据牛顿定律有zm y z k t F 11)()(=-- ① 同理对质量块2m 有ym y k y z k 221)(=-- ② 设状态变量z x =1 12x zx == y x =3 34x y x == 由式① 13111112)(m t F x m k x m k z x++-== 由式② 32211214x m k k x m k y x+-== 因此有)(001000100000001143212212111114321t F m x x x x m k k m k m k m k x x x x ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡+--=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡ []⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=43210100x x x x y 9.3.5.2 已知系统结构图如图9-8所示。
试写出系统的状态方程和输出方程(要求写成矢量形式)。
y 图 9-8 题9.3.5.2图提示:[]xy u x x 01101212=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=9.3.5.3 已知系统的微分方程,试建立其相应的状态空间描述,并画出相应的状态结构图。
(1)u u u y y y y 86375++=+++ (2)u u uy y y y 23375++=+++ 提示:(1)[]x u x x 168100573100010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=y ,状态结构图略 (2)[]ux u x x +---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=54110057310001y ,状态结构图略。
第九章线性系统的状态空间分析与综合9-1 线性系统的状态空间描述9-2 线性系统的可控性与可观性9-3 线性定常系统的反馈结构及状态观测器9-4 李雅普诺夫稳定性分析9-5 控制系统状态空间设计9凯莱-哈密顿定理设n 阶矩阵A 的特征多项式:则A 满足其特征方程,即推论1 矩阵A 的次幂可表示为A 的n-1阶多项式:式中与A 阵的元素有关。
1110()n n n f I A a a a λλλλλ−−=−=++++ 1110()n n n f A A a A a A a I−−=++++ ()k k n ≥10 , n k mm m A A k n α−==≥∑m α9秩判据线性定常连续系统:其状态完全可控的充分必要条件是:其中,A 为n 维方阵;称为系统的可控性判别阵。
0()()(), (0), 0xt Ax t Bu t x x t =+=≥ 1n rank B AB A B n −⎡⎤=⎣⎦1 n S B AB A B −⎡⎤=⎣⎦9PBH 秩判据线性定常连续系统:其状态完全可控的充分必要条件是:式中,是矩阵A 的所有特征值。
另一种等价描述为:说明:因为这个判据是由波波夫(Popov ) 和贝尔维奇(Belevitch ) 首先提出,并由豪塔斯(Hautus ) 最先指出其可广泛应用性,故称为PBH 秩判据。
0()()(), (0), 0xt Ax t Bu t x x t =+=≥ (1,2,,)i i n λ= [] ; 1,2,,i rank I A B n i nλ−== [] ; rank sI A B n s C−=∀∈9对角线规范型判据线性定常连续系统:矩阵A 的特征值两两相异,变为对角线规范型:系统完全可控的充要条件不包含元素全为零的行12,,,n λλλ 12 0 0 n x x Bu λλλ⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎣⎦ 0()()(), (0), 0xt Ax t Bu t x x t =+=≥ B4. 输出可控性如果系统需要控制的是输出量,而不是状态,则需要研究系统的输出可控性。
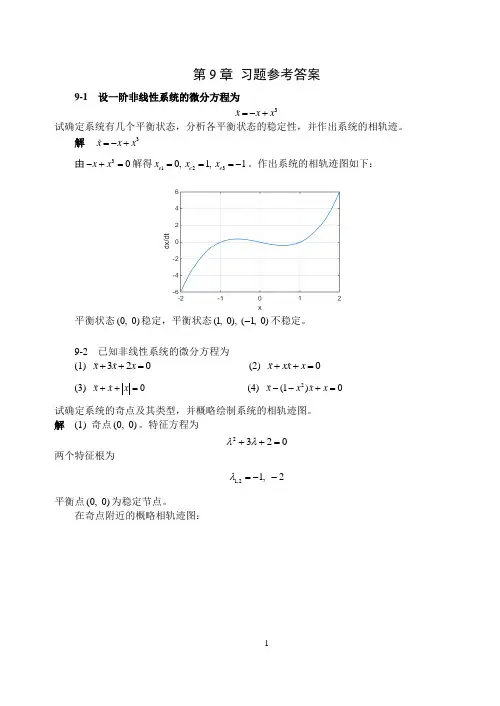
第9章 习题参考答案9-1 设一阶非线性系统的微分方程为3x x x =-+试确定系统有几个平衡状态,分析各平衡状态的稳定性,并作出系统的相轨迹。
解 3x x x =-+由30x x -+=解得1230, 1, 1e e e x x x ===-。
作出系统的相轨迹图如下:平衡状态(0, 0)稳定,平衡状态(1, 0), (1, 0)-不稳定。
9-2 已知非线性系统的微分方程为(1) 320x x x ++= (2) 0x xx x ++= (3) 0x x x ++= (4) 2(1)0x x x x --+= 试确定系统的奇点及其类型,并概略绘制系统的相轨迹图。
解 (1) 奇点(0, 0)。
特征方程为2320λλ++=两个特征根为1,21, 2λ=--平衡点(0, 0)为稳定节点。
在奇点附近的概略相轨迹图:x(2) 奇点(0, 0)。
在平衡点(0, 0)的邻域内线性化,得到的线性化模型为0x x +=其特征方程为210λ+=两个特征根为1,2j λ=±平衡点(0, 0)为中心点。
在奇点附近的概略相轨迹图:x(3) 奇点(0, 0)。
原方程可改写为0000x x x x x x x x ++=≥⎧⎨+-=<⎩其特征方程、特征根和类型为21,221,2100.50.866 10 1.618, 0.618 j λλλλλλ⎧++==-±⎪⎨+-==-⎪⎩稳定焦点鞍点 在奇点附近的概略相轨迹图:(4) 奇点(0, 0)。
在平衡点(0, 0)的邻域内线性化,得到的线性化模型为x x x-+=其特征方程为210λλ-+=两个特征根为1,20.50.866jλ=±平衡点(0, 0)为不稳定焦点。
在奇点附近的概略相轨迹图:xx9-3 非线性系统的结构图如图9-48所示。
系统开始是静止的,输入信号r(t)=4·1(t),试写出开关线方程,确定奇点的位置和类型,在e-e平面上画出该系统的相平面图,并分析系统的运动特点。