PID控制器设计磁悬浮小球控制系统
- 格式:doc
- 大小:3.86 MB
- 文档页数:16
下推式动态磁悬浮装置摘要:改进了一种下推式动态磁悬浮装置。
该装置以Arduino开发板为控制元件,直流电机驱动板驱动两组线圈完成控制,首次将电位器加入装置中,从而使悬浮浮子的稳定性有非常大的提高,抗外界干扰能力也大大增强,适合实验表演和物理玩具,也期待应用。
关键词:磁悬浮下推式PID控制1 引言如今,磁悬浮技术以其独特的优越性在世界范围内快速发展,运用于经济建设的各个领域。
进行磁悬浮技术的研究可以实现物理学、自动控制等多个学科领域的交叉渗透,现实意义非常重要。
磁悬浮系统实质上来说,是一个不稳定的、非线性系统,因此该装置的稳定控制,一直都受到广泛的关注和研究。
为实现稳定的磁悬浮,使用控制的方法有很多,但大多比较复杂,且成本较高,难以用于实际应用。
目前,已经有了一定应用的磁悬浮装置多采用上拉式的设计,即用通电线圈提供向上的磁力,霍尔元件作为传感器,用于控制线圈磁力,使浮子受到磁力与重力平衡,达到悬浮的目的。
但是上拉式的控制方式中,浮子的浮力完全由线圈提供,系统的功耗相对较大,装置的体积也较大。
而且这样的系统控制方式比较简单,但是由于只提供了一个方向的约束,又是开环控制,稳定范围较窄,这些都限制了其应用的范围。
针对以上问题,本文设计的下推式动态磁悬浮装置采用改进型PID控制,算法简易高效,能够有效改善系统的动态品质,整个装置立体性强,集成度高,体积较小便于携带,更重要的是稳定性非常好。
2 原理2.1 装置原理根据悬浮的实现形式,磁悬浮现象可以分为静态磁悬浮与动态磁悬浮。
1842年,数学家山姆·恩绍(Samuel Earnshaw)用数学方法证明,单靠宏观的静态古典电磁力,磁悬浮是不可能实现的,即恩绍大定理。
在该定理的条件下,物件处于不平衡稳定,引力、静电场及静磁场等会使物件变得很不稳定。
但是,如果利用物质的抗磁性,则能够实现永磁悬浮系统中浮子的稳定悬浮。
目前,该静态磁悬浮现象的研究与应用主要集中在超导体与磁材的磁悬浮上。
磁悬浮列车的电磁浮升原理与控制优化磁悬浮列车是一种基于磁悬浮技术的先进交通工具,其独特的电磁浮升原理使得它能够在轨道上以高速行驶,具有较低的摩擦阻力和噪音。
本文将介绍磁悬浮列车的电磁浮升原理以及相关的控制优化技术。
一、电磁浮升原理磁悬浮列车的电磁浮升原理是通过利用轨道上的电磁力来使列车浮起并保持在一定的高度上。
具体而言,磁悬浮列车的轨道上铺设有一系列的电磁铁,这些电磁铁产生的磁场与列车上的磁体相互作用,从而产生一个向上的浮力。
在磁悬浮列车的轨道上,每个电磁铁都通过电流来产生磁场。
当列车上的磁体接近电磁铁时,由于磁体和电磁铁之间的相互作用,列车会受到一个向上的浮力。
通过控制电磁铁的电流,可以调节磁场的强度,从而控制列车的浮升高度。
二、控制优化技术为了实现磁悬浮列车的稳定浮升和高速行驶,需要对其进行精确的控制和优化。
以下是几种常见的控制优化技术。
1. PID控制PID控制是一种经典的控制算法,它通过不断调节控制器的输出来使得被控对象的输出与期望值尽可能接近。
在磁悬浮列车中,可以利用PID控制来调节电磁铁的电流,从而控制列车的浮升高度。
通过不断监测列车的浮升高度和速度,PID控制器可以根据误差信号来调整电流的大小,使得列车能够稳定地浮起并保持在一定的高度上。
2. 模糊控制模糊控制是一种基于模糊逻辑的控制方法,它可以处理一些复杂的非线性系统。
在磁悬浮列车中,由于列车的浮升高度和速度都是非线性的,传统的PID控制方法可能无法满足要求。
因此,可以采用模糊控制来处理这些非线性问题。
通过建立一套模糊规则和模糊推理系统,可以实现对电磁铁电流的精确控制,从而优化列车的浮升性能。
3. 遗传算法遗传算法是一种基于生物进化原理的优化算法,它可以通过模拟自然选择和遗传变异的过程来寻找最优解。
在磁悬浮列车中,可以利用遗传算法来寻找最佳的控制参数,从而优化列车的浮升性能。
通过不断迭代和优化,遗传算法可以逐步改进控制策略,使得列车的浮升高度和速度能够达到最佳状态。
基于模糊PID控制的球磨机自动控制系统设计摘要:提出了一种模糊控制对球磨机进行自动控制的技术方案,将模糊PID 控制理论引入到球磨机控制系统中,能够很好地克服球磨机非线性、时变等因素的干扰影响,能有效地避免球磨机发生胀磨或是空磨现象。
系统运行可靠,抗干扰能力强,能较好地实现球磨机恒功率自动控制,提高了设备的生产率和自动化水平,具有较好的推广应用价值。
关键词:模糊PID控制;球磨机;自动控制系统;设计1前言球磨机是物料被破碎之后,再进行粉碎的关键设备,具有结构简单、单体容量大、破碎比高、产量大、连续运行稳定等优点,成为目前磨矿的一种主要设备。
在研磨过程中,需要对球磨机中的给矿、给水、给球进行严格控制,这些参数对产品质量有很大影响。
由于系统存在较大的惯性和滞后性,而且受外部供料条件的限制,当进入球磨机的性质发生变化时,造成球磨机的负荷波动很大,表现为运行电流大幅度摆动,且仅凭经验来判别球磨机运行是处于胀磨或是空磨状态,容易造成球磨机的损害,影响电动机及传动机械的正常运行,产品质量也得不到保证,因此对它的控制十分必要,实现其自动控制具有广阔的应用前景。
2系统设计2.1功能要求控制系统的主要控制目标是完成球磨机工作负荷稳定,也就是将控制驱动电机的功率稳定。
影响驱动电机功率稳定的主要因素是球磨机的给料量和出料量。
出料量一般为设定值,浮动范围不大,系统主要是利用控制球磨机的给矿量来控制电机在恒功率状态。
针对球磨机复杂的工况,常规的PID控制效果不佳,系统选用模糊PID 控制。
控制系统还将采集球磨机研磨时的声响、主轴的振动、主轴电机功率、润滑油温度及压力等参数及各开关与电机运行状态,在现场及上位机监控界面上显示,并运用声响、振动、功率3 个主要参数反映球磨机的负荷,更好地实现整个球磨机的优化控制。
2.2模糊控制系统结构球磨机模糊控制系统结构如图1 所示。
主驱动电动机功率通过功率变送器检测,检测到的功率信号转换成电信号送模糊控制器,模糊控制器由德国西门子公司生产的S7-300 型PLC 编程实现,采用二输入三输出的形式,模糊控制器将检测的功率值与设定的功率进行比较,根据其误差值e 及误差变化率ec作为模糊控制器的输入量,输出控制量KP、TI、TD作为PID 控制参数的输入量,根据被控过程对参数KP、TI、TD的自整定要求实现参数KP、TI、TD整定,以满足不同时刻电机功率偏差e 和偏差变化率ec对参数自动调整的要求,这样在实际控制中具有良好的动态性能,PID 的3 个参数能依据当前系统的状况来做出相应的调整。
高速列车磁悬浮系统的稳定性分析与控制高速列车磁悬浮系统是一种新型的交通工具,以磁悬浮技术为基础实现悬浮运行,具备高速、低能耗、低噪音等优势。
然而,由于列车磁悬浮系统的复杂性和外界环境的变化,需要对其稳定性进行深入分析与控制,以确保系统的运行安全和可靠性。
首先,对高速列车磁悬浮系统的稳定性进行分析是非常重要的。
磁悬浮系统的稳定性主要包括悬浮稳定性和横向稳定性两个方面。
悬浮稳定性是指列车在运行过程中与轨道之间的保持恒定的空气间隙,而横向稳定性则是指列车在运行过程中保持平稳的横向位置。
为了保证悬浮稳定性,需要对电磁铁力与列车重力之间的平衡进行精确控制,通过传感器对列车位置进行反馈,在系统中引入控制算法来实现悬浮高度的控制。
而横向稳定性则依赖于悬浮电磁铁的定位和控制系统,在列车运行过程中对其横向位置进行精确控制,以确保列车的平稳运行。
其次,对高速列车磁悬浮系统的稳定性进行控制是必不可少的。
控制系统是指通过传感器获取列车运行状态信息,并通过控制算法对电磁铁力进行调节的系统。
为了实现稳定的悬浮和运行,可采用PID控制、模糊控制或自适应控制等方法。
其中,PID控制算法是最常用的一种方法,可通过调节比例、积分和微分三个参数来实现对系统的稳定控制。
模糊控制则是一种基于模糊逻辑的控制方法,通过建立模糊规则集和模糊推理来实现对系统的精确控制。
自适应控制则是通过监测系统的状态和参数变化,自动调整控制参数,以适应外界环境变化和系统的动态特性。
这些控制方法可以结合使用,通过多个控制环节来实现对高速列车磁悬浮系统的稳定性控制。
此外,对高速列车磁悬浮系统的稳定性分析与控制还需考虑其他因素。
例如,温度对系统的稳定性会产生影响,因此需要进行温度补偿的设计。
同时,机械结构的稳定性以及气动效应等也需要进行综合考虑。
对于磁悬浮列车来说,风力对其稳定性的影响尤为重要,可以通过改变列车形状、增加外部防护以及控制系统的调整来降低风力对列车稳定性的影响。
基于PID的液位控制系统的设计与实现液位控制系统是工业生产过程中常用的控制技术之一、PID(比例-积分-微分)控制器是一种经典的控制算法,可以有效地实现液位控制。
本文将设计和实现基于PID的液位控制系统。
液位控制系统一般由传感器、执行器和控制器组成。
传感器用于测量液位高度,执行器用于调节液位,而控制器则根据测量值和设定值之间的差异来控制执行器的运动。
在这个过程中,PID控制器起到关键的作用。
首先,我们需要设计传感器来测量液位高度。
常见的液位传感器有浮子式、压力式和电容式传感器。
根据实际应用需求,选择适合的传感器。
传感器的输出值将作为反馈信号输入到PID控制器中。
其次,我们需要选择合适的执行器来调节液位。
根据液位的控制需求,可以选择阀门、泵等执行器。
这些执行器的动作是由PID控制器输出的控制信号来控制的。
接下来,我们将重点介绍PID控制器的设计和实现。
PID控制器由比例、积分和微分三个部分组成。
比例部分输出和误差成正比,积分部分输出和误差的累积和成正比,微分部分输出和误差的变化率成正比。
PID控制器的公式为:输出=Kp*错误+Ki*积分误差+Kd*微分误差其中,Kp、Ki、Kd是PID控制器的三个参数。
这些参数的选择对于系统的稳定性和响应速度有重要影响。
参数的选择需要通过实验和调试来确定。
在PID控制器的实现中,有两种常用的方式:模拟PID和数字PID。
模拟PID控制器基于模拟电路实现,适用于一些低要求的应用场景。
数字PID控制器基于微处理器或单片机实现,适用于更复杂的控制场景。
在具体的实现中,我们需要先进行系统建模和参数调整。
系统建模是将液位控制系统转化为数学模型,以便进行分析和设计。
常见的建模方法有传递函数法和状态空间法。
参数调整是通过实验和仿真等手段来确定PID控制器的参数。
接下来,根据建模和参数调整的结果,我们可以进行PID控制器的实际设计和实现。
在设计过程中,需要注意选择合适的控制算法和调试方法,以保证系统的稳定性和性能。
磁悬浮电机的设计与实现引言磁悬浮电机是一种基于磁悬浮技术和电动机原理相结合的先进电机。
与传统的机械轴承支撑电机不同,磁悬浮电机利用磁力使转子浮在空中,消除了摩擦损耗和机械磨损,从而提高了电机的效率和可靠性。
本文将介绍磁悬浮电机的设计原理和实现方法。
设计原理磁悬浮电机的设计原理基于磁力平衡和电力驱动。
首先,通过使用永磁体和电磁体产生的磁场相互作用,可以使转子悬浮在气隙中。
然后,通过改变电磁体的电流来调节磁场的强度,从而控制转子的位置。
最后,通过施加交变电流使转子旋转,实现电机的工作。
磁悬浮电机通常采用两种磁悬浮方式:永磁悬浮和电磁悬浮。
永磁悬浮电机通过使用稳定的永磁体来产生悬浮力,从而实现转子的悬浮和驱动。
电磁悬浮电机则通过使用电磁体来产生悬浮力,需要外部电源来提供悬浮力。
两种方式各有优点和适用范围,具体选择应根据实际应用需求进行。
设计步骤1. 确定设计要求在开始设计磁悬浮电机之前,需要确定设计要求,包括功率、转速范围、悬浮方式等。
这些要求将直接影响到电机的设计参数和性能。
2. 选取磁悬浮方式根据设计要求和应用需求,选择适合的磁悬浮方式。
永磁悬浮适用于小功率和高速应用,电磁悬浮适用于大功率和低速应用。
3. 选择磁悬浮材料根据悬浮方式选择合适的磁悬浮材料。
永磁悬浮电机通常采用永磁体材料,如永磁铁、钕铁硼等。
电磁悬浮电机可以选择软磁材料,如硅钢片等。
4. 设计磁悬浮系统设计磁悬浮系统包括磁悬浮轴承和磁悬浮电磁体。
根据转子的重量和转速范围,选择合适的磁悬浮轴承类型,如径向磁悬浮轴承、轴向磁悬浮轴承等。
设计磁悬浮电磁体时,需要考虑电磁体的尺寸、线圈参数等。
5. 设计控制系统设计控制系统是磁悬浮电机设计的关键。
控制系统需要实时监测转子位置和速度,并根据要求调整电磁体的电流,实现转子的悬浮和驱动。
常用的控制策略包括PID控制、模糊控制、自适应控制等。
6. 制造和调试在完成设计后,进行磁悬浮电机的制造和调试。
制造过程包括制造磁悬浮轴承、制造电磁体、组装电机等。
磁悬浮实验的基本原理和设计思路一、悬浮原理磁悬浮实验的基本原理是利用磁力的相互作用,使物体在空气中悬浮。
具体来说,磁悬浮实验是通过电磁感应的方式产生一个交变电流,这个电流会产生一个变化的磁场。
当物体放置在这个变化的磁场中时,它会受到一个向上的推力,从而使物体悬浮在空气中。
二、设计思路1. 系统结构磁悬浮实验系统主要由以下几部分组成:控制系统、传感器、电源、导轨和载体。
其中,控制系统负责控制电源输出和传感器采集数据;传感器用于检测载体位置和速度;电源提供所需的电能;导轨是载体运动的基础;载体则是被悬浮在导轨上的物体。
2. 系统工作原理系统工作原理如下:(1)控制系统通过传感器采集载体位置和速度信息,并将其送回控制器。
(2)控制器根据采集到的信息计算出所需输出的电流,并将其发送给电源。
(3)电源根据控制器发送过来的信号输出相应大小和方向的电流。
(4)导轨上的线圈受到电流的作用,产生一个变化的磁场。
(5)载体中的磁体受到变化的磁场作用,产生一个向上的推力,使其悬浮在导轨上。
(6)载体位置或速度发生变化时,传感器会重新采集信息,控制系统会重新计算输出电流,并将其发送给电源,以保持载体在正确位置上悬浮。
三、关键技术1. 控制系统控制系统是整个磁悬浮实验中最关键的部分之一。
它需要能够准确地控制电源输出和传感器采集数据,并根据采集到的数据计算出所需输出的电流。
因此,在设计控制系统时需要考虑如何提高控制精度、降低噪声干扰等问题。
2. 传感器传感器是另一个关键技术。
它需要能够准确地检测载体位置和速度,并将这些信息反馈给控制系统。
常用的传感器包括霍尔元件、光电开关等。
在选择传感器时需要考虑其精度、响应速度等因素。
3. 电源磁悬浮实验中需要使用高频交流电源。
在选择电源时需要考虑其输出电流大小和稳定性等因素。
4. 导轨导轨是载体运动的基础,因此其设计也非常重要。
常用的导轨包括线圈导轨和永磁导轨两种。
在选择导轨时需要考虑其制造工艺、成本等因素。
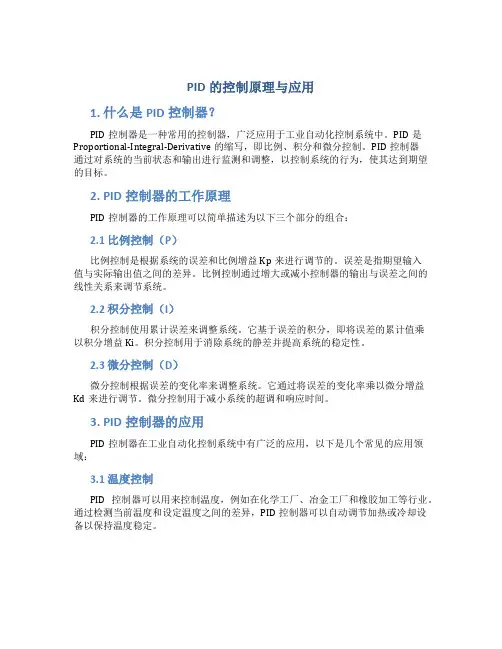
PID的控制原理与应用1. 什么是PID控制器?PID控制器是一种常用的控制器,广泛应用于工业自动化控制系统中。
PID是Proportional-Integral-Derivative的缩写,即比例、积分和微分控制。
PID控制器通过对系统的当前状态和输出进行监测和调整,以控制系统的行为,使其达到期望的目标。
2. PID控制器的工作原理PID控制器的工作原理可以简单描述为以下三个部分的组合:2.1 比例控制(P)比例控制是根据系统的误差和比例增益Kp来进行调节的。
误差是指期望输入值与实际输出值之间的差异。
比例控制通过增大或减小控制器的输出与误差之间的线性关系来调节系统。
2.2 积分控制(I)积分控制使用累计误差来调整系统。
它基于误差的积分,即将误差的累计值乘以积分增益Ki。
积分控制用于消除系统的静差并提高系统的稳定性。
2.3 微分控制(D)微分控制根据误差的变化率来调整系统。
它通过将误差的变化率乘以微分增益Kd来进行调节。
微分控制用于减小系统的超调和响应时间。
3. PID控制器的应用PID控制器在工业自动化控制系统中有广泛的应用,以下是几个常见的应用领域:3.1 温度控制PID控制器可以用来控制温度,例如在化学工厂、冶金工厂和橡胶加工等行业。
通过检测当前温度和设定温度之间的差异,PID控制器可以自动调节加热或冷却设备以保持温度稳定。
3.2 速度控制PID控制器可用于调节马达或电机的转速,例如在机械制造、运输设备和自动化生产线等领域。
PID控制器根据实际转速与设定转速之间的差异,通过调节电压或电流来控制系统的速度。
3.3 液位控制PID控制器在液态介质的存储和流动中也有应用,例如在水处理厂、化工厂和石油工业中。
通过监测液位,PID控制器可以自动调节阀门或泵的开关以维持液位稳定。
3.4 压力控制PID控制器可用于控制管道或容器内的压力,例如在石油、天然气和化工行业。
PID控制器通过检测实际压力与设定压力之间的差异,自动调节阀门或泵的开闭以控制压力。

超高速列车磁悬浮控制系统设计与实现近年来,高速列车作为人们出行的重要选择,受到了越来越多的关注。
其中,磁悬浮列车具有高速稳定、无摩擦、无噪音等优点,被广泛认可作为未来城市轨道交通的发展方向。
而磁悬浮列车的核心部分便是磁悬浮控制系统。
本文将从磁悬浮控制系统的原理、设计和实现三个方面,介绍超高速列车磁悬浮控制系统的相关知识。
一、磁悬浮控制系统的原理磁悬浮列车是通过磁力悬浮技术实现悬浮和牵引的。
其中,磁悬浮控制系统是核心部分,它由车体姿态控制系统、悬浮力控制系统和进出站控制系统三个大部分构成。
1. 车体姿态控制系统车体姿态控制系统主要作用是控制车体在行驶中的姿态,确保车体的稳定性。
它能够通过控制悬浮力合力点(又称“补偿点”)的位置,来实现车体姿态的调整。
2. 悬浮力控制系统悬浮力控制系统主要作用是控制车体与轨道间的距离,以保持合适的悬浮高度。
其调节基于电磁簧的线圈,通过改变电磁簧中的电磁场强度,来修正车体与引导轨之间的距离差。
3. 进出站控制系统进出站控制系统主要作用是控制列车的运行速度、加减速度和停车位置等,以保证列车安全、平稳地进出车站。
二、磁悬浮控制系统的设计磁悬浮控制系统的设计,主要包括控制模型的建立和控制算法的设计。
1. 控制模型的建立磁悬浮控制系统的建模是为了寻找一种适合控制的模型,通常可以使用状态空间模型或者其他控制模型。
其中,状态空间模型可以将动态系统表示为一系列微分方程,从而便于控制器的设计和控制器参数的调整。
2. 控制算法的设计控制算法是磁悬浮控制系统的关键部分,无论是经典的PID控制算法,还是先进的自适应控制算法,都需要针对具体情况进行设计。
比如,对于磁悬浮列车,由于其速度快、重量轻、摩擦小等特点,采用传统的PID控制算法可能存在一些性能不佳的问题。
因此,一些高级控制算法,如模糊控制、神经网络控制、自适应控制等,已经应用到了磁悬浮列车的控制系统中。
三、磁悬浮控制系统的实现磁悬浮控制系统的实现是将设计好的控制器标准化和生产。
磁悬浮轴承系统的控制设计学生姓名沈炯锋指导老师贺红林摘要:磁悬浮轴承(简称磁轴承)是一种新型的支撑部件,是一种典型的机电一体化产品。
与传统轴承相比,它具有无接触、回转速度高、无磨损等特点,在航空航天、机械工程、机器人等高科技领域内,具有广泛的应用前景。
磁轴承的工作性能主要取决于其控制系统的好坏。
因此,本文着重地研究了磁轴承的控制系统的设计问题。
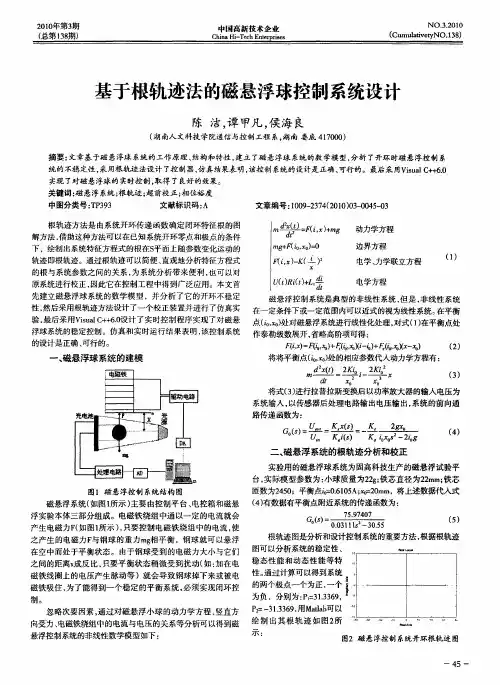
通过对磁轴承的发展历史和研究现状进行总结和回顾,论文首先简要地介绍了磁轴承的工作原理及其典型结构;然后,根据磁学和动力学的有关理论建立起了单自由度向心磁轴承的运动方程模型;紧接着,文中提出并研究了磁轴承闭环控制系统的结构方案;为了保证磁轴承工作的性能,文中引入了不完全微分的PID算法对其进行控制,同时还以MATLAB为工具对PID控制器的参数进行了整定;为了检验控制实施后磁轴承的性能,本文还从时域和频域等多方面对系统进行了仿真,结果表明,基于PID控制的磁轴承系统能获得预期的性能;在论文的最后,作者对全文进行了总结,并对进一步的研究工作进行了展望。
关键词:磁轴承系统 PID算法控制设计性能仿真指导老师签名:A design of control system on magnetic bea r ingsPrepared by: Shen JiongfengSupervisor: He HonglinAbstract:As a new kind of supporting components and a typical metronics product, magnetic bearings have many advantages such as no contact, high speed, and no abrasion etc. Magnetic bearings can be applied in many fields such as aviation and spaceflight , mechanical engineering and robot . The performance of control system is the key for the magnetic bearings to work steadily, so, the most important work in this paper is to design a steady control system.By the review of the history and the development of the magnetic bearings, the work principle and typical structure of such a bearing is introduced firstly; and then, based on magnetism and dynamics the kinematical equation of the bearing is built; after that, a control structure using PID law is proposed and studied. At the same time, the controller parameter is given; for verifying the performance of magnetic bearing with PID controller, the control system is analyzed by MATLAB in many aspects such as time domain and frequency domain. The result indicated that the magnetic bearings, which based on PID control, could acquire anticipant performance. Finally, the summary of this paper and the vista of further study are given by the author.Key words: magnetic bearings PID law design of controller simulation The signature of supervisor:目录1、绪论 (1)1.1、磁悬浮轴承简介 (1)1.2、磁悬浮轴承的基本原理 (2)1.3、磁悬浮轴承的研究现状与发展 (3)1.4、论文的主要工作 (6)2、磁悬浮轴承机械系统的设计 (8)2.1、磁悬浮轴承的结构及材料 (8)2.2、磁悬浮轴承系统的结构布置形式 (8)2.3、电磁铁的设计 (9)2.4、初始参数的选择 (11)3、磁悬浮轴承动力学模型的建立 (13)3.1、单自由度转子的数学模型 (13)3.2、转子的位移方程 (14)4、控制系统分析 (16)4.1、控制系统概述 (16)4.2、控制系统方框图 (18)4.3、传感器 (19)4.4、功率放大器 (20)4.4.1、线性功放 (21)4.4.2、开关功放 (21)4.5、控制器 (22)4.5.1、系统校正的概念 (22)4.5.2、校正的分类 (22)4.5.3、PID控制器 (23)5、控制系统的设计 (27)5.1、控制策略的选择 (27)5.2、控制系统主要元器件参数选择 (28)5.3、控制系统的性能指标 (29)5.4、控制系统仿真工具简介 (30)5.4.1、MATLAB介绍 (31)5.4.2、SIMULINK3.0 (32)5.5、控制器参数整定及仿真分析 (33)5.5.1、动态特性参数法(Ziegler-Nichols整定公式) (33)5.5.2、基于SIMULINK的仿真 (37)5.5.3、结果分析 (45)6、总结与展望 (47)致谢 (48)参考文献 (49)1、绪论1.1 磁悬浮轴承简介现代机械工程都在朝着信息化、自动化、智能化发展,近几十年的发展表明,在现代机械工程领域里,几乎所有有生命力、有发展前途、有较大影响的新技术、新工艺和新生科研方向都集中在机电一体化(mechantronics)领域。
MATLAB课程设计课程名称:采用PID控制器设计磁悬浮小球控制系统学院:电气工程学院学号:P*********姓名:***班级:10级自动化一班指导教师:杨成慧老师目录摘要........................................................11.引言.........................................................22.系统分析与设计..................................... 52.1系统建模及仿真..............................................5 2.2建立磁悬浮小球系统框图....................................72.3 PID控制系统..........................................82.4 仿真结果分析..............................................13 2.5 总结.....................................................132.6 答谢.....................................................133.参考文献.......................................................14摘要:本文通过对一个磁悬浮小球的分析,简单的描述了磁悬浮列车的原理。
控制要求通过调节电流使小球的位置始终保持在平衡位置。
通过对磁悬浮小球系统进行数学建模,求出它的系统传递函数,采用PID算法设计调节器,对小球的稳定性进行了分析和仿真,在MATLAB平台仿真获得适当的PID参数范围,进行频域分析,使得磁悬浮小球系统处在平衡状态,在仿真过程中对PI,PD,及PID三种方式进行了比较和分析,对其加入扰动信号,即正弦扰动信号,观察输出波形,对扰动进行分析。
本文通过对磁悬浮小球系统的分析,体现了MATLAB的强大功能,突出了它在运算以及作图仿真方面的优势。
关键字: MATLAB, PID控制器, 磁悬浮小球系统,稳定性1.引言磁悬浮列车的原理并不深奥。
它是运用磁铁“同性相斥,异性相吸”的性质,使磁铁具有抗拒地心引力的能力,即“磁性悬浮”。
将“磁性悬浮”这种原理运用在铁路运输系统上,使列车完全脱离轨道而悬浮行驶,成为“无轮”列车,时速可达几百公里以上。
这就是所谓的“磁悬浮列车”,亦称之为“磁垫车”。
由于磁铁有同性相斥和异性相吸两种形式,故磁悬浮列车也有两种相应的形式:一种是利用磁铁同性相斥原理而设计的电磁运行系统的磁悬浮列车,它利用车上超导体电磁铁形成的磁场与轨道上线圈形成的磁场之间所产生的相斥力,使车体悬浮运行的铁路;另一种则是利用磁铁异性相吸原理而设计的电动力运行系统的磁悬浮列车,它是在车体底部及两侧倒转向上的顶部安装磁铁,在T形导轨的上方和伸臂部分下方分别设反作用板和感应钢板,控制电磁铁的电流,使电磁铁和导轨间保持10─15毫米的间隙,并使导轨钢板的吸引力与车辆的重力平衡,从而使车体悬浮于车道的导轨面上运行。
磁悬浮列车的产生让人们又多了一种交通方式的选择,磁悬浮列车与当今的高速列车相比具有很多优点:由于磁悬浮列车是轨道上行驶,导轨与机车之间不存在任何实际的接触,成为“无轮”状态,故其几乎没有轮、轨之间的摩察,时速高达几百公里;磁悬浮列车可靠性大、维修简便、成本低,其能源消耗仅是汽车的一半、飞机的四分之一;噪音小,当磁悬浮列车时速达300公里以上时,噪声只有656分贝,仅相当于一个人大声地说话,比汽车驶过的声音还小;由于它以电为动力,在轨道沿线不会排放废气,无污染,是一种名副其实的绿色交通工具。
PID控制器中文叫比例、微分、积分控制器。
其中P也就是比例,它的作用是将误差放大,作为控制量输出;I积分,它的作用是不断的将误差加起来,也就是考虑了以前时刻的误差量,把这些误差加起来作为控制量输出;D微分,就是考虑连续2个时刻的误差变化,将这个变化作为控制量输出。
PID控制器是在工业领域中常见的控制部件,其把偏差用作新的输入值,改善系统的动态和稳态性能,使被控变量的实际值与工艺要求的预定值基本一致.PID控制器,由比例环节P,积分环节I和微分环节D组成。
其传递函数为()⎪⎭⎫ ⎝⎛++=s T s T k s G 2111,通过k,T1,T2三个参数的整定来实现对系统的精确控制。
2.系统分析与设计2.1、系统建模及仿真(参考材料:物理力学、电磁学)磁悬浮小球系统简介:它主要由铁芯、线圈、位置传感器、放大器、控制器和控制对象小球组成,系统开环结构如图所示。
控制要求:调节电流,使小球的位置x 始终保持在平衡位置。
下面来建立其控制系统传递函数。
忽略小球受到的其它干扰力,则受控对象小球在此系统中只受电磁吸力F 和自身重力mg 。
球在竖直方向的动力学方程可以如下描述:),()(22x i F mg dt t x d m -= _______________________(1)式中:x ——磁极到小球的气隙,单位m ;m ——小球的质量,单位Kg ;F(i,x)——电磁吸力,单位N ;g ——重力加速度,单位m/s 2。
由磁路的基尔霍夫定律、毕奥-萨格尔定律和能量守恒定律,可得电磁吸力为:2220),(⎪⎭⎫ ⎝⎛-=x i AN x i F μ———————————(2)式中:0μ——空气磁导率,4π*10-7H/m ;A ——铁芯的极面积,单位m 2;N ——电磁铁线圈匝数;x ——小球质心到电磁铁磁极表面的瞬时气隙,单位m ;i ——电磁铁绕组中的瞬时电流,单位A 。
根据基尔霍夫定律,线圈上的电路关系如下:()()dt t di Lt Ri t U )(+=——————————(3)式中:L ——线圈自身的电感,单位H ;i ——电磁铁中通过的瞬时电流,单位A ;R ——电磁铁的等效电阻,单位Ω。
当小球处于平衡状态时,其加速度为零,即所受合力为零,小球的重力等于小球受到的向上电磁吸力,即:()20020002,⎪⎪⎭⎫⎝⎛-==x i AN x i F mg μ__________________(4)综上所述,描述磁悬浮小球系统的方程可完全由下面方程确定:),()(22x i F mg dt t x dm-=2220),(⎪⎭⎫⎝⎛-=x i AN x i F μ()20020002,⎪⎪⎭⎫⎝⎛-==x i AN x i F mg μ()()dt t di Lt Ri t U )(+=以小球位移为输出,电压为输入,可得系统的传递函数为:31123312)(k k s k s k s k k s G +--=其中:220AN k μ-=3212mx ki k =222mx ki k -=L R k -=3设系统参数如下表1所示:序号 参数数量单位1 m 28 g2 R 13 Ω 3 L 118 mH4 x 0 15.5 mm 5 i 0 1.2 A6 k 4.587x10-5Nm 2/A 2则有:k k 1 k 2 k 3 4.5877x10-51264.5175032.09110.17表1 参数设定2.2、建立磁悬浮小球系统框图1:图1 磁悬浮小球系统框图具体操作:打开MATLAB软件,在命令窗口中输入simulink,利用sinmulink中模块库中的基本模块,建立系统模型,得到如上图所示的系统框图,经过运行得到仿真图形如图2所示:图2 未加PID控制器前的仿真图形从示波器所显示的特性可以看出,此系统是一开环不稳定系统,当有一微小扰动时,小球将偏离平衡位置。
因此,我们需要使用某种方法来控制小球的位置。
下面,我们将使用PID控制器来稳定系统。
2.3、PID控制系统在做PID控制系统之前,先通过几个例子来了解和区分一下PI,PD,PID 控制器的在系统稳定性中的作用。
首先是一个PI的程序和图形3:G0=zpk([],[-1,-2],1);Ti=[0.5,1,3,6,10,15];kp=3;for i=1:6;Gc=tf([kp,kp/Ti(i)],[1 0])sys=feedback(G0*Gc,1)step(sys)hold ongrid onylabel('x0(t)')legend ('Ti=0.5','Ti=1','Ti=3','Ti=6','Ti=10','Ti=15')title('Kp=3时不同积分常数下的单位响应曲线对比图')end图3 PI曲线仿真图从上图可以看出,PI环节由于累积效应,可以消除余差,改善系统的稳态性能。
PD程序及图形4:G0=zpk ([],[-1 -2],1);Td=[0,0.3,0.7,1.5,3,5];for i=1:6Gc=tf([3*Td(i),3],1)sys=feedback(G0*Gc,1)step(sys)hold ongrid onylabel('x0(t)')legend('Td=0','Td=0.3','Td=0.7','Td=1.5','Td=3','Td=5')title('Kp=3时不同微分常数下的单位响应曲线对比图')end图4 PD曲线仿真图PD环节具有超前调节作用,可以使系统的快速性得以提高,提高系统的动态性能。
PID程序及仿真图形5如下:kp=100;Ti=0.8;Td=1;G=tf(1,[1 1 1 2]);for i=1:length(Td);Gc=tf(kp*[Ti*Td(i),Ti 1]/Ti,[0 1]);sys=feedback(Gc*G,1);step(sys)hold ongrid onylabel('x0(t)')axis([0,1,0,1.2])title('Kp=100,Ti=0.8,Td=1时单位响应曲线') end图5 PID曲线仿真图PID控制器对于系统来说,有很大的改善作用,不仅影响系统的动态性能,也能改善系统的稳态性能。
从上图可以看出,系统已经稳定。
下面就利用PID来改善磁悬浮小球控制系统的性能。
利用MATLAB设计具有PID控制器的磁悬浮小球控制系统,其控制系统简图如图6所示。