两轮自平衡直立车
- 格式:pptx
- 大小:3.66 MB
- 文档页数:17
基于MPU6050六轴传感器平衡小车的设计占华林;邹丽彬;欧阳烨【摘要】两轮自平衡小车是通过使用陀螺仪、加速度计等常用的姿态传感器来监测车身所处的俯仰状态和状态变化率,经数字控制中心处理与计算,再发出适当的指令给驱动电动机产生前进或后退的加速度,以保持车体前后平衡的状态.本设计选用STM32单片机作为主控制器,用MPU6050六轴传感器和两个陀螺仪传感器来检测车的状态,通过TB6612FNG控制小车的两个电机,让小车不断地处于新旧交替的平衡状态,实现了两轮小车的硬件控制系统.%Two wheel self balancing trolley monitors the pitch state and the rate of state change through the attitude sensors such as gyroscopes and accelerometers,via the digital control center processing and calculation,and then sends the appropriate instructions to the motor driven by the acceleration forward or backward in order to maintain the balance of the body.This project uses STM32 microcontroller as the main controller, detects the status of the car using MPU6050 six sensors and two axis gyroscopes sensors and controls two motors by TB6612FNG,lets the car constantly in a state of balance between the old and the new,thus reals the two wheel car hardware control system.【期刊名称】《电子测试》【年(卷),期】2017(000)021【总页数】2页(P10-11)【关键词】两轮自平衡小车;陀螺仪;MPU6050六轴传感器;加速度计【作者】占华林;邹丽彬;欧阳烨【作者单位】江西科技师范大学,江西南昌,330013;江西科技师范大学,江西南昌,330013;江西科技师范大学,江西南昌,330013【正文语种】中文最近几年,电子信息技术突飞猛进,移动机器人研究与开发越来越变得智能,已成为自然科学最活跃的领域之一,移动机器人也已经走进寻常百姓家。
第九届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告学校: 南京师范大学队伍名称: 先驱者参赛队员: 李昊洋王亮姜云磊带队教师: 沈世斌张亮关于技术报告和研究论文使用授权的说明本人完全了解第九届“飞思卡尔”杯全国大学生智能汽车邀请赛关于保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:李昊洋王亮姜云磊带队教师签名:沈世斌张亮日期:2014.8.10摘要本文以第九届全国大学生智能车竞赛为背景,介绍了两轮自平衡小车控制系统的软硬件结构和开发流程。
该比赛采用大赛组委会统一指定的E型车模,以Freescale半导体公司生产的32位单片机MK60FX512VLQ15 KinetisARM-Cortex M4为核心控制器,在IAR6.3开发环境中进行软件开发,使用MT9V022 CMOS摄像头进行赛道信息采集。
整个系统涉及硬件电路设计、控制策略、整车机械架构等多个方面。
为提高在高速运行下的稳定性,进行了不同方案的设计,并使用Matlab进行了大量的数据分析以及上位机的设计调试,确定了现有的整车架构和相关控制参数。
车模使用飞思卡尔加速度传感器MMA7361以及MPU6050的陀螺仪模块进行角度融合,获取车模姿态,完成平衡直立。
根据MT9V022采集到的赛道信息进行软件二值化后路径规划,通过两轮电子差速实现转向。
关键词:Freescale,智能车,MT9V022,第九届摄像头,卡尔曼滤波目录引言 (Ⅴ)第一章两轮自平衡智能车硬件电路设计 (1)1.1两轮自平衡智能车的电源管理 (1)1.2最小系统板设计 (2)1.3 两轮自平衡智能车的电机驱动设计 (4)1.4两轮自平衡智能车的姿态传感器模块的设计 (5)1.5 摄像头的选用 (6)1.6速度反馈模块 (7)1.7 人机交互模块的设计 (7)第二章两轮自平衡智能车机械结构设计 (9)2.1车模底板的微改装 (9)2.2电池的安装 (10)2.3摄像头传感器的安装 (10)2.4姿态传感器的安装 (11)第三章程序控制说明 (13)3.1系统软件流程 (13)3.2中断处理与程序分配 (13)3.3位置式PID (14)3.4摄像头图像处理与识别 (14)3.5两轮平衡控制 (15)3.6速度控制 (16)3.7直立控制、速度控制、转向控制融合 (17)第四章系统开发及调试工具 (19)4.1开发工具 (19)4.2MATLAB数据处理 (19)第五章心得总结 (22)参考文献 (25)附录 A 人字弯处理程序 (Ⅵ)引言全国大学生“飞思卡尔”杯智能汽车竞赛是以“立足培养、重在参与、鼓励探索、追求卓越”为宗旨,鼓励创新的一项科技竞赛活动。

一种基于PID算法的自平衡车控制系统设计作者:吴振磊孙二威李笑笑来源:《甘肃科技纵横》2019年第08期摘要:自平衡小车相当于一台小型移动机器人,因为它是集机械、通信、数据处理、电子等于一身的移动智能处理系统,并且拥有较复杂的非线性系统,将它作为各种控制算法的理想平台再合适不过了。
本文设计了一种基于PID算法的自平衡车控制系统,首先根据控制要求对其进行了建模,从原理上解释了控制的方式,并采用PID算法进行实行。
关键词:自平衡车;PID算法;平衡建模;中图分类号: TP319;;;;;;;; 文献标志码:A1;; 引言自平衡小车可以说是小型移动机器人,因为它是集机械、通信、数据处理、电子等于一身的移动智能处理系统,并且拥有较复杂的非线性系统,将它作为各种控制算法的理想平台再合适不过了。
这些年来,由于人类科学技术的不断进步,微电子领域的急速发展,各种各样新型的、模块化的、低成本的集成芯片成为电子产品设计的重要组成部分,朝着体积愈来愈小,重量愈来愈轻,功用愈来愈巨大的目标飞速成长,使得本来仅仅存在于理论上的两轮自平衡小车得以设计出来,并大批运用到军事领域。
同样在民用领域,由于其绿色无污染、独特的外观和人性化的设计,并且相对于普通轮式机器人来说,它的优点更是突出,因为是两轮直立所以占用的空间更小,相当小的转弯半径使得它适用于多种应用场景,如仓储运输、载人工具、自动投递等。
2;; 基本控制要求2.1 总体要求本设计是在假定小车在获得来自两轮的动力能保持自身平衡的状态情况下进行的,在有这样假定的前提下,我们对小车的平衡系统进行分析就会相对容易,那我们就可以得到一个控制理论:只要通过控制驱动模块来控制电机的运行状态就可以实现对小车的平衡状态进行控制。
因此,两轮自平衡小车的控制要求可以分为以下三个基本任务:(1)车身的平衡控制:在进行下一步控制前首先要保持小车自身的平衡,這只需要对小车的两个车轮进行控制,从而保持小车模型不向一边倾倒;(2)车身的速度控制:在一定的倾斜角度下,对小车倾倒的快慢进行控制,经过一系列控制后,电机的速度最终演变为实现电机的速度;(3)车身的转向控制:我们可以通过控制车模的转速不一样从而形成速度差,这样就可以实现对运行方向的选择,并且转弯半径较小;并且无论平衡、速度还是转向,所有的控制要求最终都只能通过两个车轮的驱动电机所完成,所以在控制时各个任务之间就会存在相互耦合。
基于STM32的平衡车设计文章鉴于平衡车在当今世界的发展热潮提出了一种设计方案。
文章基于STM32微处理器,通过卡尔曼滤波法和PID控制实现了两轮平衡车的自平衡控制。
该设计方案采用加速度计和陀螺仪共同采集获取姿态角,得到可靠的输出。
标签:平衡车;加速度计;陀螺仪;卡尔曼滤波;PID算法前言平衡车作为一种交通工具,广泛应用于航空、安保等领域。
鉴于其绿色、节能、方便、灵活、轻巧等优点,解决了很多诸如交通、能源、环保等问题带来的压力,平衡车作为一种理想的交通工具具有很大的市场。
随着现代科技的不断进步,对于市场上平衡车的响应的精确度和速度的要求不断提高,文章设计方案通过陀螺仪测量角度和角速度,并通过加速度计来矫正陀螺仪的角度漂移,实现了精确度的提高。
1 力学原理分析如图1所示,类比倒立摆,控制车轮做加速运动,得到车模恢复力:F=mgsin?兹-macos?兹≈mg?兹-mk1?兹(1)式(1)中k1是车轮加速度a与偏角θ的比例。
因为空气中存在摩擦力,即阻尼力,则式(1)变作:F=mg?兹-mk1?兹-mk2■ (2)可得:a=k1?兹+k2■ (3)式(3)中k1大于g,k2大于0;k1决定了车模平衡的位置,k2决定了车模的响应时间。
从上述数学模型中可以看出,只需知道车模的倾角及角速度,即可推得车轮的加速度,从而可以控制电机的转速,实现对车轮的正确控制。
2 控制系统设计控制系统的整体设计方案是:通过陀螺仪测得车模的倾角和角速度,加速度计用来消除陀螺仪角度漂移。
两者测得数据经过A/D转换输入到控制器中,经过卡尔曼滤波得到可靠的车模角度。
同时编码器测得车轮速度传递到控制器中。
处理器经过PID算法结合车模角度和车轮速度输出PWM控制量驱动电机运转,改变车轮的转速。
具体框图如图2所示。
图2系统整体采用PID控制算法,如图3所示。
在速度控制和角度控制中都使用了微分环节,目的是使车模快速的稳定下来,加快了响应时间。

基于图像信息采集的自动寻迹平衡小车设计作者:崔渊姬丰欣陈祝洋高倩钱铮来源:《江苏理工学院学报》2021年第06期摘要:針对循迹自平衡车的两个关键技术难点——直立控制和视觉导航,采用STM32F407VET6单片机为控制核心。
一方面,采集MPU6050六轴传感器的加速度与角速度数据,经卡尔曼滤波后得到精准的直立倾角信息,结合速度-姿态串级PID控制器,加快电机对误差的响应速度,实现对平衡车直立的精确控制;另一方面,利用DMA机制采集OV7670摄像头的图像信息,并对其进行灰度化、高斯图像滤波、图像二值化、路径提取和拟合等处理,得到精确的路径信息,实现平衡车的视觉导航。
为了增强人机交互体验,平衡车的关键数据还将实时传输到Android 端App,并可通过App对平衡车进行控制。
关键词:STM32;自平衡车;卡尔曼滤波;循迹;串级PID;Android中图分类号:TM935.3文献标识码:A文章编号:2095-7394(2021)06-0031-11自平衡车一直是机器人领域的研究热点,它的出现改变了人们的生产生活方式,极大地提高了生产效率,降低了生产成本和危险性,进一步促进了人们对智能化生活的需求。
自平衡车是一个典型的倒立摆系统,由于倒立摆系统其本质是不稳定的,所以需对车身进行实时调整才能保持其稳定状态[1]。
目前,基于自平衡车这种面临环境的不确定性,人们对其自主处理事务能力的要求越来越高,国内外的相关研究也取得了大量重要成果,包括典型的PID控制、模糊控制以及人工神经网络控制等[2]。
相比于传统的超声波、光电对管等传感器只能获取单一的环境信息而言,摄像头获得的信息更加全面丰富,但同时也加剧了处理器的运算负担,所以视觉算法难以获得广泛应用。
近年来,由于半导体制造技术的快速发展以及机器视觉算法的成熟,这些瓶颈逐步得到突破,为基于视觉导航的自平衡车的研究奠定了重要基础。
目前,虽然市面上平衡车琳琅满目,但大多价格昂贵、功能单一,并且需要人为控制,在智能化程度方面尚不能满足人们的需求。
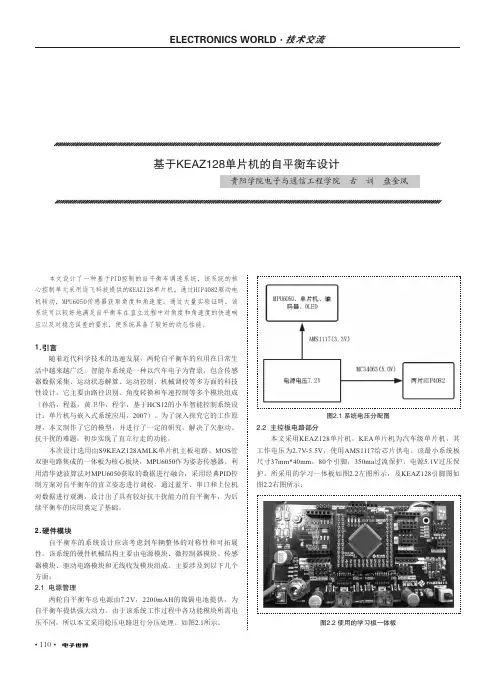
• 110•本文设计了一种基于PID控制的自平衡车调速系统,该系统的核心控制单元采用逐飞科技提供的KEAZ128单片机,通过HIP4082驱动电机转动,MPU6050传感器获取角度和角速度。
通过大量实验证明,该系统可以较好地满足自平衡车在直立过程中对角度和角速度的快速响应以及对稳态误差的要求,使系统具备了较好的动态性能。
1.引言随着近代科学技术的迅速发展,两轮自平衡车的应用在日常生活中越来越广泛。
智能车系统是一种以汽车电子为背景,包含传感器数据采集、运动状态解算、运动控制、机械调校等多方面的科技性设计。
它主要由路径识别、角度转换和车速控制等多个模块组成(孙浩,程磊,黄卫华,程宇,基于HCS12的小车智能控制系统设计:单片机与嵌入式系统应用,2007)。
为了深入探究它的工作原理,本文制作了它的模型,并进行了一定的研究,解决了欠驱动、抗干扰的难题,初步实现了直立行走的功能。
本次设计选用由S9KEAZ128AMLK 单片机主板电路、MOS 管双驱电路集成的一体板为核心板块,MPU6050作为姿态传感器。
利用清华滤波算法对MPU6050获取的数据进行融合,采用经典PID 控制方案对自平衡车的直立姿态进行调校。
通过蓝牙、串口和上位机对数据进行观测,设计出了具有较好抗干扰能力的自平衡车,为后续平衡车的应用奠定了基础。
2.硬件模块自平衡车的系统设计应该考虑到车辆整体的对称性和可拓展性。
该系统的硬件机械结构主要由电源模块、微控制器模块、传感器模块、驱动电路模块和无线收发模块组成。
主要涉及到以下几个方面:2.1 电源管理两轮自平衡车总电源由7.2V ,2200mAH 的镍镉电池提供,为自平衡车提供强大动力。
由于该系统工作过程中各功能模块所需电压不同,所以本文采用稳压电路进行分压处理。
如图2.1所示。
图2.1 系统电压分配图2.2 主控板电路部分本文采用KEAZ128单片机,KEA 单片机为汽车级单片机,其工作电压为2.7V-5.5V ,使用AMS1117给芯片供电。
一种新的两轮自平衡电动车控制方法
段其昌;翁珏;李丰兵
【期刊名称】《计算机应用研究》
【年(卷),期】2013(030)012
【摘要】为了克服目前两轮自平衡电动车控制系统存在的噪声和漂移误差大,受扰后调节时间长,超调量较大等问题,提出了一种新的控制方法.该方法基于卡尔曼信号融合滤波,构建了直接转矩电流伺服单元,对电动车进行滑模变结构控制.实验表明滤波后倾角度噪声误差由6°降到2.5°;角速度噪声误差由0.25 rad·s-1降到
0.10rad·s-1;零位漂移误差由0.25 rad· s-1降为0.08 rad·s-1;系统受扰动后,该方法调节时间更短、无超调、鲁棒性更强.实验结果均表明该方法有更好的动态性能和稳定性.
【总页数】4页(P3678-3681)
【作者】段其昌;翁珏;李丰兵
【作者单位】重庆大学自动化学院,重庆400030;重庆大学自动化学院,重庆400030;重庆大学自动化学院,重庆400030;桂林电子科技大学数学与计算科学学院,广西桂林541004
【正文语种】中文
【中图分类】TP242.3
【相关文献】
1.自平衡两轮电动车控制系统仿真研究 [J], 姚尚明;童亮;杜迪
2.基于卡尔曼滤波的自平衡两轮电动车多传感器信息融合研究 [J], 朱军;刘慧君;李香君;王栋
3.直立式两轮自平衡电动车电控系统的研究 [J], 郭爽;黄钰媛;赵文宝;霍岩
4.基于形态仿生的两轮平衡电动车设计研究 [J], 韦雪岩
5.一种两轮自平衡机器人比例-积分-微分控制方法 [J], 闫辉;贾彦茹;董建军
因版权原因,仅展示原文概要,查看原文内容请购买。
一、实习背景随着科技的飞速发展,智能平衡车作为一种新型的交通工具,逐渐走进了人们的生活。
它不仅能够满足人们日常出行需求,还具有时尚、环保的特点。
为了深入了解智能平衡车的研发、生产及使用过程,我于近期参加了智能平衡车实习,现将实习情况报告如下。
二、实习目的1. 了解智能平衡车的基本原理和组成结构;2. 掌握智能平衡车的生产流程及质量控制方法;3. 熟悉智能平衡车的操作方法及维护保养技巧;4. 提高自己的实践能力和团队合作精神。
三、实习内容1. 智能平衡车基本原理及组成结构智能平衡车采用两轮共轴设计,通过陀螺仪、加速度传感器等设备实现自平衡功能。
其核心部件包括:(1)电池:为智能平衡车提供动力;(2)电机:驱动车轮转动;(3)控制器:负责智能平衡车的运行控制;(4)陀螺仪:检测车体倾角,实现自平衡;(5)加速度传感器:检测车体加速度,辅助陀螺仪实现自平衡;(6)无线通信模块:实现手机APP远程控制。
2. 智能平衡车生产流程及质量控制智能平衡车的生产流程主要包括以下步骤:(1)原材料采购:根据设计要求,选购合适的电池、电机、控制器等原材料;(2)零部件加工:对原材料进行切割、焊接、组装等加工;(3)组装:将加工好的零部件组装成整车;(4)调试:对整车进行各项性能测试,确保其正常运行;(5)包装:将合格的产品进行包装,准备发货。
在智能平衡车的生产过程中,质量控制至关重要。
主要控制方法如下:(1)原材料检验:确保原材料符合设计要求;(2)加工过程控制:严格控制加工精度,确保零部件质量;(3)组装过程控制:确保零部件组装牢固,无虚焊、漏焊现象;(4)性能测试:对整车进行各项性能测试,确保其符合国家标准。
3. 智能平衡车操作方法及维护保养智能平衡车操作方法如下:(1)开机:长按电源键,等待陀螺仪稳定;(2)前进:向前倾斜身体;(3)后退:向后倾斜身体;(4)左转:向左倾斜身体;(5)右转:向右倾斜身体;(6)停止:保持身体直立。
自平衡车的电流环串级PID控制设计林嘉裕;戴廷飞;熊慧【摘要】为了解决两轮自平衡电动车用传统占空比控制无法实现对转矩的精确控制问题,本文采用飞思卡尔微处理器MK60DN512ZVLQ10,卡尔曼滤波算法获取车身倾角实时最优值,基于电流环的串级PID控制来调节直流电机.电流传感器精度能达到1%左右,系统受扰动后,此方法调节时间更短、超调量更小、鲁棒性更强.实验结果表明,直接转矩控制在快速性、稳定性和抗扰性等方面明显优于传统占空比控制.%In order to solve the problem that the traditional duty cycle control of two-wheeled self-balancing electric vehicle can not realize the accurate control of torque,the design uses MK60DN512ZVLQ10 as the core,the real-time inclination angle of vehicle body is obtained by kalman filter algorithm,the loop cascade PID control is used to regulate the DC motor.The accuracy of the current sensor can reach about 1%,when the system is disturbed,this method has the shorter settling time,the smaller overshoot and the stronger robustness.So the direct torque control is superior to conventional duty control in terms of fastness,stability and immunity.【期刊名称】《单片机与嵌入式系统应用》【年(卷),期】2017(017)005【总页数】5页(P63-67)【关键词】卡尔曼滤波算法;电流环;串级PID控制;MK60DN512ZVLQ10【作者】林嘉裕;戴廷飞;熊慧【作者单位】天津工业大学电气工程与自动化学院,天津 300387;天津工业大学电气工程与自动化学院,天津 300387;天津工业大学电气工程与自动化学院,天津300387【正文语种】中文【中图分类】TP212.9;TP273引言两轮自平衡电动车以其具有结构简单、转弯灵活、无刹车、易于驾驶和环保节能等优点,已经成为移动机器人领域的一大研究热点[1]。
FRONTIER DISCUSSION | 前沿探讨1 引言由于轻量级、简单的设计和易于操纵的特点,自行车深受人们所喜爱,世界上第一辆自行车是德国巴登男爵卡尔·冯·德莱斯于1817年研制出来的一种木轮车,它有车把可以控制方向,这辆木质自行车对人类有着重大贡献,为日后自行车的更迭换代打下了基础,它的诞生距今已有上百年时间。
随着社会科技与经济实力的不断发展,人们的生活也变得越发富足了起来,人们对生活的追求已经从仅仅解决个人的温饱问题逐渐转变为更加舒适、健康的生活,因此,人们越来越追求精致的智能生活,智能手环,智能家居,智能汽车等产品的相继出现,进一步推动了“互联网+”的热潮,智能化生活已成为时代之大势所趋,在今天,自行车也因为本身使用率极高,而突然立于这一课题的风口浪尖,传统自行车正面临着科技智能化的挑战[1]。
众所周知,自行车的平衡性与其行进速度的快慢息息相关,行驶速度越快,自行车的平衡性也就越稳定,骑行者能够通过左右摆动车把轻松控制自行车的行进方向,而当自行车处于低速或者完全静止,或受到外力影响的情况下,骑行者无法通过控制车把而使自行车长时间保持平衡,所以,若要使自行车实现智能化,其需要解决的最根本的问题便是车体的平稳性。
以下论文将对近年来无人自行车平衡系统的发展史进行概述,总结在研究中所出现的优缺点,并对无人自行车的发展前景寄予期望。
2 结构优化2.1 车身结构一辆普通的自行车的基础结构主要包括:导向、制动以及驱动系统。
早在19世纪whpple等人就在对自行车动力学的研究中提及了关于自行车自平衡的机械问题[2],但受限于技术上的困难,并没有对此做出过于深入的研究。
长久以来,研究人员们为了保障自行车在无人操控的情况下也能够保持平衡状态行进,在自行车的结构方面不断的进行优化,并使用了许多方法进行论证和试验。
针对无人自行车进行结构上优化这一难题,我国首次对此进行研究是由学者刘延柱在1990年所发布的对人车系统稳定性的探讨中指出的此前国外学者将骑行者与车身视为一体以此进行分析的不合理结论,并凭借大量数据进行对比分析纠正了此类错误[3]。