FLOW单板的技术特点图列(快穿固定器)
- 格式:docx
- 大小:159.78 KB
- 文档页数:4

电磁阀VUVG/阀岛VTUGSubject to change –2017.062→Internet:/catalogue/...电磁阀VUVG主要特性创新通用可靠易安装•可设置为内先导或外先导,用于板式阀阀组•通过电接口插件可方便地更换连接技术•最大压力10bar •结构特点:–活塞滑阀,带密封圈(VUVG-LK,VUVG-BK)–活塞滑阀,带密封阀芯(VUVG-L,VUVG-B)•多种阀功能•可选快插接头•管式阀•板管式阀可用作气路板集成安装•M5和M7管式阀可组合在一块气路板上•气路板带多个压力分区•IP40,IP65•坚固耐用的金属元件–阀–气路板•快速排除故障,得益于360°LED 显示•可快捷地更换阀片,维护便利•可选手控装置:按钮式,封盖式,按钮式/锁定式或锁定式(不带附件)•牢固地安装到墙面或H 型导轨•随带螺丝和密封件,安装方便•通过电接口插件可方便地更换连接技术•标签支架,用于阀的标签阀岛配置器CAD 相关数据→阀岛配置器帮助您选择正确的阀岛VTUG ,订购正确的产品更方便。
阀岛VTUG 通过订货代码订购。
所有阀岛供货时已装配完毕并单独做过测试。
最大限度减少了装配和安装时间。
订货系统,用于阀岛VTUG →Internet:vtug-V-新产品VUVG-LK,VUVG-BK2017.06–Subject to change 3Internet:/catalogue/...电磁阀VUVG主要特性–气动元件单个阀和阀岛管式阀用作单个阀管式阀VUVG-LK/VUVG-L管式阀可无需气动耦合就可使用。
所有气接口位于阀上,可配备接头/气管。
电接口有多种不同的电接口插件可选。
如果使用过了特殊密封套件,管式阀VUVG 还可作为半管式阀安装在气路板(气动耦合)上。
板管式阀可用作气路板集成安装半管式阀VUVG-S阀岛VTUG 由半管式阀VUVG-S 组成对于半管式阀,进气口(1,3和5)通过气动耦合(如,气路板)与阀连接。
Easy! Software LLCEasy!Flow用户参考手册作者::Easy! Software LLC作者版本: 2.0状态: 已发布Easy! Software LLC通用商业信息本文件中包含的信息受版权保护。
任何对本文件所包含信息所进行的未被授权的发布、修订和出版,均是被禁止的。
使用此文件必须由美国Easy! Software LLC公司授权。
© Easy! Software LLC. 2008 - 2009索引术语 (3)1. 概述 (4)2. 项目计划与进度跟踪 (6)3. 文档管理 (14)4. 开发与集成 (17)5. 代码同级审查 (26)6. 用户发布管理 (30)7. 工作项状态变更 (31)8. 查询报表与项目度量 (32)9 自动化质量控制– 基于产品的过程策略定制 (39)附录 A – 参考链接 (41)附录 B - CMMI PAs (Process Areas) (42)术语工作项(Ticket):在Easy!Flow中,工作项(ticket)代表一个具体的可以被指派的工作任务细粒度项,具体而言,可以是一个新功能的开发、缺陷的修复、文档的变更等等。
每个工作项可以有父工作项和子工作项。
通过工作项的父子关系,可以将一个工作项进一步细化成多个子项。
任务(Task):任务(task)为项目计划中的工作任务粗粒度项。
可以为一个任务关联多个工作项。
也就是一个项目计划中的任务(task)可以关联多个工作项。
产品(Product): 被开发的最终交付用户使用的软件或软件系统。
特性(Feature): 满足特定用户需求的软件功能。
项目(Project):在Easy!Flow中,项目是指在软件产品的开发中,开发某些满足特定需求集合的工作的总称。
一个软件产品可以包含多个项目。
在极端的情况下,软件产品可能只包含一个项目。
版本(Version):为区分软件产品或项目的重大变化,在软件产品或项目中用版本来进行标识。
目录第一阶段:球阀设计打开模型……………………………………………………………………………1-1创建b 项目…………………………………………………………………1-2边界条件……………………………………………………………………………1-5定义工程目标…………………………………………………………………………1-7求解……………………………………………………………………………………1- 8监测求解过程…………………………………………………………………………1-8调整模型透明度………………………………………………………………………1-10切面云图……………………………………………………………………………1-10表面云图………………………………………………………………………………1-11等值图………………………………………………………………………………1-12流动迹线图…………………………………………………………………………1-13 XY 图………………………………………………………………………………1-15表面参数………………………………………………………………………………1-16分析球形部分中一个设计变化……………………………………………………… 1-16复制项目……………………………………………………………………………1-19分析b 应用中的一个设计变化……………………………………………1-19第一阶段:耦合热交换打开模型………………………………………………………………………………2-1 准备模型……………………………………………………………………………2-2 创建b 项目………………………………………………………………… 2-3 定义风扇………………………………………………………………………………2-6 定义边界条件…………………………………………………………………………2-8 定义热源………………………………………………………………………………2-9 创建新材料…………………………………………………………………………2-10 定义固体材料…………………………………………………………………………2-10 定义工程目标…………………………………………………………………………2-11 定义体积目标…………………………………………………………………… 2-11 定义表面目标…………………………………………………………………… 2-13定义全局目标…………………………………………………………………… 2-14改变几何求解精度…………………………………………………………………2-15 求解…………………………………………………………………………………2-16 观察目标………………………………………………………………………………2-16 流动迹线图…………………………………………………………………………2-17 切面云图……………………………………………………………………………2-19 表面云图……………………………………………………………………………2-22第一阶段:多孔介质打开模型………………………………………………………………………………3-2 创建b 项目…………………………………………………………………3-2 定义边界条件…………………………………………………………………………3-4 创建一个等向性的多孔介质………………………………………………………3-5 定义多孔介质-等向性………………………………………………………3-7 定义表面目标………………………………………………………………………… 3-7 定义方程目标………………………………………………………………………3-8 求解……………………………………………………………………………………3-9 观察目标……………………………………………………………………………… 3-10 流动迹线图…………………………………………………………………………… 3-10 复制项目……………………………………………………………………………… 3-11 创建一个单向性的多孔介质………………………………………………………… 3-12 定义多孔介质-单向性……………………………………………………………… 3-12 比较等向性和单向性多孔介质……………………………………………………… 3-13确定水力损失模型描述……………………………………………………………………………4-2 创建项目……………………………………………………………………………… 4-3 定义边界条件………………………………………………………………………… 4-7 定义表面目标………………………………………………………………………… 4-8 运行计算……………………………………………………………………………… 4-9 监测计算……………………………………………………………………………… 4-10 复制项目……………………………………………………………………………… 4-10 创建切面云图………………………………………………………………………… 4-11创建全局目标………………………………………………………………………… 4-15 计算器使用…………………………………………………………………………… 4-16 改变几何参数………………………………………………………………………… 4-18圆柱体阻力系数创建项目…………………………………………………………………………… 5-2 定义2D 流动平面………………………………………………………………… 5-6 定义全局目标……………………………………………………………………… 5-7 定义方程目标……………………………………………………………………… 5-7 复制项目并且创建一个新例子…………………………………………………… 5-8 改变项目设置………………………………………………………………………5-9 改变方程目标………………………………………………………………………5-10 创建模板…………………………………………………………………………… 5-10 以模板方式创建一个项目………………………………………………………… 5-11 求解一系列项目…………………………………………………………………… 5-12 获取结果…………………………………………………………………………… 5-12 热交换系数打开模型…………………………………………………………………………… 6-2 创建项目…………………………………………………………………………… 6-3 对称边界条件……………………………………………………………………… 6-5 定义流体子区域…………………………………………………………………… 6-6 定义边界条件……………………………………………………………………… 6-7 定义固体材料……………………………………………………………………… 6-10 定义体积目标……………………………………………………………………… 6-11 运行求解…………………………………………………………………………… 6-11 观察目标…………………………………………………………………………… 6-12显示流动迹线图…………………………………………………………………… 6-14 计算表面参数……………………………………………………………………… 6-16 计算热交换系数…………………………………………………………………… 6-18 定义参数显示范围…………………………………………………………………6-18网格优化问题描述…………………………………………………………………………… 7-2 模型定义…………………………………………………………………………… 7-3 定义项目……………………………………………………………………………7-3 边界条件……………………………………………………………………………7-3 手动设置最小网格间隙尺寸……………………………………………………… 7-7 关闭自动网格定义…………………………………………………………………7-9 生成网格如下所示,约75000网格单元使用Local Intial Mesh 选项…………………………………………………7-10 定义控制平面………………………………………………………………………7-12 再创建一个局部初始网格…………………………………………………………7-14EFD Zooming的应用问题描述……………………………………………………………………………8-1 两种使用b 进行求解问题的方式…………………………………………8-3 EFD Zooming 方法步骤……………………………………………………………8-3 EFD Zooming 第一阶段………………………………………………………8-4 EFD Zooming 项目第一阶段…………………………………………………8-4 EFD Zooming 第二阶段………………………………………………………8-8 EFD Zooming 项目第二阶段…………………………………………………8-8 改变散热器……………………………………………………………………8-14 复制项目到存在的模型定义…………………………………………………8-14局部初始化网格方法………………………………………………………………8-15 使用局部初始化网格方法的b 项目(Sink No1) …………………… 8-15 使用局部初始化网格方法的b 项目(Sink No2) …………………… 8-18 结果………………………………………………………………………………… 8-18纺织机械问题描述…………………………………………………………………………… 9-1 模型定义…………………………………………………………………………… 9-2 定义项目…………………………………………………………………………… 9-3 边界条件…………………………………………………………………………… 9-3 定义旋转壁面……………………………………………………………………… 9-4 初始条件-旋转…………………………………………………………………… 9-5 定义目标…………………………………………………………………………… 9-6 结果-光滑表面…………………………………………………………………… 9-7 显示粒子流和流动迹线……………………………………………………………9-8 模拟粗糙旋转壁面………………………………………………………………… 9-10 改变壁面粗糙度…………………………………………………………………… 9-10 结果-粗糙壁面…………………………………………………………………… 9-11圆形通道中的非牛顿流体流动问题描述………………………………………………………………………………10-1 模型定义………………………………………………………………………………10-2 定义非牛顿流体……………………………………………………………………… 10-2 定义项目………………………………………………………………………………10-2 边界条件………………………………………………………………………………10-3 定义目标…………………………………………………………………………10-3 与流体水进行比较…………………………………………………………………… 10-4 改变项目设置……………………………………………………………………10-4具有反射镜和屏幕的加热球问题描述…………………………………………………………………………… 11-1 模型结构…………………………………………………………………………… 11-2 案例 1 ………………………………………………………………………………11-3 定义项目……………………………………………………………………… 11-3 定义计算域……………………………………………………………………11-3 调整自动网格设置……………………………………………………………11-4 定义辐射表面…………………………………………………………………11-4 定义物体对于热辐射的可穿透性…………………………………………… 11-5 热源和目标定义………………………………………………………………11-5 案例 2 ……………………………………………………………………………… 11-6 改变辐射表面状况……………………………………………………………11-6 定义全局目标…………………………………………………………………11-6 定义固体的初始条件…………………………………………………………11-6结果………………………………………………………………………………… 11-7旋转叶轮问题描述………………………………………………………………………………12-1 模型定义………………………………………………………………………………12-2 定义项目………………………………………………………………………………12-2 边界条件………………………………………………………………………………12-3 定义静止壁面……………………………………………………………………12-4 叶轮效率………………………………………………………………………………12-4 定义项目目标…………………………………………………………………………12-5 结果……………………………………………………………………………………12-7CPU 冷却器问题描述………………………………………………………………………………13-1 模型定义………………………………………………………………………………13-2 定义项目………………………………………………………………………………13-2 定义计算域……………………………………………………………………………13-2 旋转区域………………………………………………………………………………13-3 定义静止壁面…………………………………………………………………………13-5 固体材料………………………………………………………………………………13-6 热源……………………………………………………………………………………13-6 初始网格设置…………………………………………………………………………13-7结果……………………………………………………………………………………13-11特性列表下面罗列了出现在教程中的b 相应的物理和界面特性。
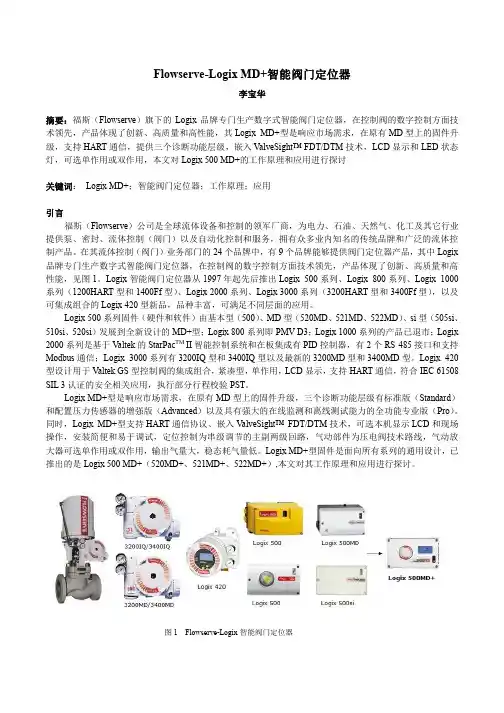
Flowserve-Logix MD+智能阀门定位器李宝华摘要:福斯(Flowserve)旗下的Logix品牌专门生产数字式智能阀门定位器,在控制阀的数字控制方面技术领先,产品体现了创新、高质量和高性能,其Logix MD+型是响应市场需求,在原有MD型上的固件升级,支持HART通信,提供三个诊断功能层级,嵌入V alveSight™ FDT/DTM技术,LCD显示和LED状态灯,可选单作用或双作用,本文对Logix 500 MD+的工作原理和应用进行探讨关键词:Logix MD+;智能阀门定位器;工作原理;应用引言福斯(Flowserve)公司是全球流体设备和控制的领军厂商,为电力、石油、天然气、化工及其它行业提供泵、密封、流体控制(阀门)以及自动化控制和服务,拥有众多业内知名的传统品牌和广泛的流体控制产品。
在其流体控制(阀门)业务部门的24个品牌中,有9个品牌能够提供阀门定位器产品,其中Logix 品牌专门生产数字式智能阀门定位器,在控制阀的数字控制方面技术领先,产品体现了创新、高质量和高性能,见图1。
Logix智能阀门定位器从1997年起先后推出Logix 500系列、Logix 800系列、Logix 1000系列(1200HART型和1400Ff型)、Logix 2000系列、Logix 3000系列(3200HART型和3400Ff型),以及可集成组合的Logix 420型新品,品种丰富,可满足不同层面的应用。
Logix 500系列固件(硬件和软件)由基本型(500)、MD型(520MD、521MD、522MD)、si型(505si、510si、520si)发展到全新设计的MD+型;Logix 800系列即PMV D3;Logix 1000系列的产品已退市;Logix 2000系列是基于V altek的StarPac TM II智能控制系统和在板集成有PID控制器,有2个RS 485接口和支持Modbus通信;Logix 3000系列有3200IQ型和3400IQ型以及最新的3200MD型和3400MD型。
福斯FLOWSERVE阀门定位器福斯定位器配置指南福斯(FLOWSERVE)阀门定位器调试方法(锦菲特I3599429OO2)[Q-Q,6696 22933]flowserve阀门、Flowserve 3400IQ定位器、LOGIX500、LOGIX510、LOGIX520、D3系列P-5 气动定位器电动气动数字 - 通用,IS 和 EXHART、Profibus、Foundation 现场总线反馈机组、限位开关比如 PP5XX-HPGU-23K01-PV9DA-3ZPMV P-1700 系列阀门专为腐蚀或高温环境应用设计,其所有外部零件均由不锈钢制造而成。
P-1700 和 1720 型阀门的内部零件采用不锈钢制造,而P-1710 和 P-1730 型阀门的内部零件则采用铝制。
P-1720 和P-1730 型阀门具有超高的空气传送能力。
P-1700 系列阀门专为双向操作应用设计,不过也可通过旋动一个阀座轻松实现单向操作。
不锈钢磁场外壳内的PMV I/P转换器很容易安装在 P-1700 系列阀门上。
P-1500 P-1520P-1700 P-1720P-1710 P-1730Digital具有 PID 控制的2000 数字定位器品牌 Logix说明福斯 Logix 2000 是一款具有板载 PID 控制的数字定位器。
通信方式为 4-20mA 或Modbus。
阀门上安装的 PID 控制器每秒更新阀杆次,从而减少了控制系统延迟。
Logix3200IQ 数字定位器 3200IQ-10-D6-M-04-40-0G-0F3200IQ-10-D6-M-04-40-0G-00品牌 Logix说明福斯 Logix 3200IQ 数字 HART? 定位器使用先进的 piezo 技术提供一流的性能和可靠性。
通过使用本地按钮、HART 手持设备和SoftTools软件可轻松配置 Logix 3200IQ。
LOGIX 3201IQ定位器 P/N:215809.999.000,SN:4107028LOGIX 3202IQ定位器 P/N:221734.999.000,SN:4907010LOGIX 3203IQ定位器 P/N:216428.999.000,SN:610727定位器 P/N:215809.999.000,SN:55070043400IQ Digital Positioner品牌 Logix说明 The Flowserve Logix 3400 Series digital Foundation? Fieldbuspositioner utilizes state-of-the-art piezo technology to provide…500 数字定位器品牌 Logix说明福斯 Logix 500 数字定位器是下一代本质安全型 Logix 500 系列的代表。
MIKE 21/3 FLOW MODEL FM沙模块用户使用手册目录(Contents)目录(Contents) (1)1 关于本文档(About this guide) (3)1.1 编写本文档的目的(Purpose) (3)1.2 用户所需的知识背景(Assumed User Background) (3)1.3 MIKE Zero模型编辑器程序界面结构(General Editor Layout) (3)1.3.1 导航栏(Navigation tree) (3)1.3.2 编辑窗体(Editor window) (3)1.3.3 有效性显示窗体(Validation window) (4)1.4 在线帮助系统(Online Help) (4)2 引言(Introduction) (5)2.1 概述(General specification) (5)2.1.1 适用范围(Application areas) (5)3 说明(Getting started) (6)4 示例(Examples) (7)4.1 概述(General) (7)4.2 U型河道示例(U-shaped flume) (7)4.3 环流示例(Sand transport in circulation current) (7)5 沙模块(Sand Transport Model) (7)5.1 模型定义(Model Definition) (7)5.1.1 概述(General description) (8)5.1.2 床面活动层厚度(Layer thickness) (8)5.1.3 驱动力参数(Forcing parameters) (8)5.1.4 单一水流工况(Pure flow) (8)5.1.5 波流共同作用工况(Combined current and waves) (9)5.2 时间参数(Time Parameters) (10)5.3 求解格式(Solution technique) (10)5.3.1 备注与提示(Remarks and hints) (11)5.4 泥沙特性(Sediment properties) (11)5.4.1 泥沙特性(Sediment properties) (11)5.4.2 推荐取值(Recommended values) (12)5.5 床面阻力(Bed resistance) (12)5.5.1 概述(General description) (12)5.5.2 参数取值(Data) (13)5.5.3 推荐取值(Recommended value) (13)5.6 驱动力参数(Forcings) (13)5.6.1 波浪(Waves) (14)5.6.2 水流(Flow) (15)5.7 扩散(Dispersion) (16)5.7.1 平流扩散(Horizontal dispersion) (16)5.7.2 对流扩散(Vertical dispersion) (17)5.7.3 推荐设置(Recommended values) (17)5.8 源汇项(Sources) (17)5.8.1 源汇项设定(Source specification) (18)5.8.2 备注与提示(Remarks and hints) (18)5.9 初始条件(Initial Conditions) (18)5.9.1 泥沙粒径组分浓度(Fraction Concentration) (19)5.9.2 床面活动层厚度(Layer thickness) (19)5.10 边界条件(Boundary Conditions) (20)5.10.1边界设置(Boundary Specification) (20)5.11 地貌演化模块(Morphology modoule) (21)5.12 输出(Outputs) (21)5.12.1 图形化查看(Geographic view) (21)5.12.2 输出类型(Output type) (22)5.12.3 输出项(Output items) (26)6 地貌演化模块(Morphology module) (29)6.1 概述(General description) (29)6.2 模型定义(Model definition) (29)6.3 时间参数(Time Parameter) (30)6.4 河岸侵蚀(Bank Erosion) (30)6.5 边界条件(Boundary conditions) (30)6.5.1 边界说明(Boundary specification) (30)1 关于本文档(About this guide)1.1 编写本文档的目的(Purpose)编写本文档的主要目的在于指导用户使用MIKE 3 Flow Model FM模型中的沙模块(非粘性泥沙输移的计算)。
推拉式快速夹手柄和手摇杆固定方式结构设计说明书1. 引言本文旨在对推拉式快速夹手柄和手摇杆的固定方式进行结构设计说明。
推拉式快速夹手柄和手摇杆是一种常用于机械设备中的控制装置,用于固定和操作工件。
本文将详细介绍设计的原理、结构及其优势。
2. 设计原理推拉式快速夹手柄和手摇杆的固定方式设计基于以下原理:2.1 快速夹紧推拉式快速夹手柄采用了一种特殊的机械结构,能够实现快速而稳定地夹紧工件。
通过推动或拉动夹手柄,内部机械装置会迅速固定住工件,并保持牢固的连接。
这种设计可以提高生产效率,并减少操作人员的劳动强度。
2.2 手摇控制手摇杆作为操作控制装置,通过旋转或移动来实现对工件的控制。
它具有灵活性好、操作简单等优点,适用于各种不同类型的机械设备。
手摇杆的固定方式需要保证其稳定性和可靠性,以确保操作的准确性和安全性。
3. 结构设计推拉式快速夹手柄和手摇杆的固定方式结构设计如下:3.1 推拉式快速夹手柄固定方式推拉式快速夹手柄的固定方式采用了螺栓连接结构。
具体设计如下:•手柄底部设计有一个孔,用于安装螺栓。
•螺栓通过孔穿过手柄,并与底座上的螺母相连。
•底座上预留了与手柄孔对应的孔,以便螺栓穿过并与螺母相连。
这种固定方式简单、易于操作,并且能够提供足够的稳定性和牢固度,确保工件在操作过程中不会松动或脱落。
3.2 手摇杆固定方式手摇杆的固定方式采用了多点支撑结构。
具体设计如下:•手摇杆底部设计有多个支撑点,分布在不同位置。
•支撑点通过螺钉或焊接与机械设备的支架相连。
•支架上预留了与手摇杆支撑点对应的孔或焊接接口。
这种固定方式能够提供多个支撑点,增加了手摇杆的稳定性和可靠性。
同时,可以根据实际需求进行调整和改变,以适应不同类型的机械设备。
4. 优势推拉式快速夹手柄和手摇杆的固定方式设计具有以下优势:•简单易用:固定方式结构设计简单,易于操作和安装。
•稳定可靠:采用螺栓连接和多点支撑结构,提供了足够的稳定性和牢固度。
$xputTWFIN ... Time to end calculation. Default is TWFIN=10.0unless thermal cycling is activated (see ThermalCycling Options).计算结束时间,在热循环开启的情况下默认值为10.0(参考热循环选项)计算完成时间ITB ... Indicator for free surfaces or sharp interfaces=0, no free surface or sharp interface=1, free surface or sharp interfaceDefaults to 0 if IDRG 5; defaults to 1 if IDRG=5.自由表面或粗糙界面的指示器=0表示二者都没有=1表示二者有其一是否考虑熔汤表面与空气的影响GY 0.0 Gravity component in y direction. See GRAVY in namelistMOTN for orientation varying gravity. Note: Forcylindrical coordinates, use GRAVX, GRAVY.考虑重力对压铸影响,注意g的方向且为-980,单位为CGS。
GRAVX 0.0 Initial x-direction component of gravity.坐标系为极坐标时用上述参数IFENRG ... Flag for internal energy evaluation=0, no energy solution=2, solve transport equation for internal energy (1storder advection)=3, solve energy transport equation using monotonicitypreserving,second order method.Defaults to 0 if ICMPRS=0 and IHTC=0;defaults to 2 if ICMPRS=1 or IHTC>0.选择能量方程用于计算ISHRNK 0 Solidification shrinkage flag. Shrinkage models mayonly be used for one-material problems (NMAT=1) whenITB=1. Solidification must be activated and solidifieddensity (RHOFS) must be different than liquid fluid #1density (RHOF). Shrinkage cavitation pressure (PCAV)must also be set for Dynamic Shrinkage model. (PCAV,RHOFS and RHOF are in namelist PROPS.)=0, no shrinkage model=1, activate Dynamic Shrinkage model=2, activate Rapid Shrinkage model.凝固收缩的定义:0表示不收缩。

APV H OM OG E NI Z E R S Rannie 275QCOST E FFI CI E NT AN D R E LIAB LEThe new homogeniser demonstrates exceptional operational efficiency. Its latest technology design combines low energy and water consumption with reliable operation. With flow rates ranging from 10,000 – 55,000 L/h (2,642-14,500 gal/h), customers can select exactly the right version for their needs.I N N OVATIVE S E RVI CE CON CE PTSpecial attention has also been given to ease of maintenance and performance monitoring to ensure that the homogeniser runs at optimum efficiency at all times. In the event that homogenisation pressure, feed pressure, cooling water flow, oil pressure, oil level or oil temperature move from prescribed parameters, electric signals can be passed to the control room to alert the operator. This sophisticated set of diagnostics, which provides unique operational advantages, is APV’s latest step in the development of the “intelligent” homogeniser. Additionally, they allow key operating parameters to be collected and saved into a database for review in order to determine optimum performance.In addition visual indicators are placed on the machine itself. The Power End is prepared for installation of sensors for monitoring of roller bearings and gear wheel conditions.E NVI R ONM E NTALLY FR I E ND LYThe APV brand 275Q is equipped with a low noise cabinet as standard. Other environmentally friendly features include a cooling system, which minimizes the use of water by engaging automatically only when the oil temperature moves outside the critical range of 40-50°C (104-122°F). The APV brand 275Q is also designed to eliminate the risk of water contamination in the oil. EAS E OF I N S PE CTI ONThe low noise cabinet has panels and doors for inspection and maintenance. The interior of the APV brand 275Q is conveniently lit for ease of inspection.BAS I C MACH I N EThe APV brand 275Q homogeniser, a five-plunger, reciprocating pump, is fitted with a single-stage homogenising valve (optional two-stage) with hydraulic actuation.The APV brand 275Q incorporates a durable slow-speed Power End that reduces vibration and noise. Easy access to the hydraulic actuation system, oil treatment unit and other auxiliary systems simplifies maintenance saving time and money.The Latest T echnology Combining Operational Efficiency With Exceptional Reliability3TH E LI QU I D E N D I N CLU D E S:• Inlet pressure gauge with low pressure switch• Pressure gauge incl. 4-20 mA output for total product pressure (1st stage prepared for automatic control)• Flow switch and solenoid valve for plunger lubrication • Weld-stub product connectionsTH E P OWE R E N D CONTR OL FEATU R E S I N CLU D E:• Oil filter alarm switch• Oil condition monitoring and control equipment • External coolerTH E HVA U N IT I N CLU D E S:• Quick unloading valve • Electrical proportional valve(s)• Pressure gauges for total hydraulic pressure and individual actuator pressure(s)• Oil temperature sensor (4-20 mA)TH E I N STR U M E NTATI ON I N CLU D E S: • Emergency stop• Potentiometers for manual pressure control • Display for total product pressureAll equipment wired to a terminal box. The APV brand 275Q is built into a low noise stainless steel cabinet.STAN DAR D OPTI ON S• Two-stage hydraulic valve actuation (HVA)• Aseptic cylinder design• High-pressure outlet connections • Micro-Gap homogenising valve • Motor starter• Controllers for automatic pressure control• Control cabinet, stainless steel• Choice of materials for cylinder block, plungers, homogenizing valves, packings, pump valves, valve seats, and seals.• Pulsation dampener(s): inlet and outlet • Flow meter for lubrication oil, monitoring slide bearings condition• Pressure transducer for lubrication oil pressure (4-20 mA output)• External cooling fan/main motor S PE CIAL OPTI ON SWe will be happy to discuss any other requirements youmay have.Transmission (Power End)Oil and HydraulicUnitsControl PanelPower Inlet137.0" (3,480 mm)84.6" (2,150 mm)67.3" (1,710 m m )40.5" (1,030 mm)D I ME NS I ONSRAN N I E /TH R E E-PI E CE VALVE H OU S I N G P OPPET/BALL TYPE VALVESSPX FLOW, Inc. reserves the right to incorporate our latest design and material changes without notice or obligation.Design features, materials of construction and dimensional data, as described in this bulletin, are provided for your information only and should not be relied upon unless confirmed in writing. Please contact your local sales representative for product availability in your region. For more information visit .The green “” and “” are trademarks of SPX FLOW, Inc.ISSUED 10/2018 3162-05-11-2012-GB COPYRIGHT © 2018 SPX FLOW, Inc.S PX FLOWOestmarken 7DK-2860 Soeborg, Denmark Phone: +45 70 278 222Fax: +45 70 278 223E:**********************Based in Charlotte, North Carolina, SPX FLOW, Inc. (NYSE: FLOW) is a multi-industry manufacturing leader. For more information, please visit 。
Reflex木芯 Flow最轻,最灵敏的木芯,带给人类已知的最高强度-重量比的木芯结构。
在你所需要的区域侧重响应性,特定区域使用更多中低密度木芯,在增加强度的同时减轻重量。
皇家威士忌使用玻璃纤维的全新剪裁,好处就是消除了固定器脚跟和脚尖的区域的抖动。
增加了边刃控制力并提供流畅平顺的滑行。
枪手威士忌一种反V字型设计,使用4条炭纤维实现疯狂的弹性,同时让板头、板尾不受约束,拥有轻快和灵活的滑行感觉。
双轴纤维(0/90度)大部份纤维在0度轴上,用于增加额外的弹性和使雪板拥有更自然的扭力弹性。
OPTIX 2000 快速并少维护。
EZDT(E-DT)边刃为EZ-Rock和另一个版本的EZ
Flat-Rock设计,EZDT在固定器和板头之间是一条小弧度的边刃,在固定器区域是更加积极抓地的边刃。
这样更加容易上手滑行,同时混合的大弧度刃也可以做出快速的换刃。
纯双向板头板尾的距离相等,使滑行在任何
方向滑行都有相同的感觉。
单向板头比板尾略长,固定器安装孔
后置,板尾跳跃会获得更多的弹性,更好的野雪漂浮。
3DT(3D-过渡)边刃平顺并拥有的宽泛的抓地能力,3D
过渡边刃的混合方式很与众不同,两脚之间弧度小的是为I-Rock,弧度超大的是为了采用Pop-Cam的雪板。
小弧度板头和固定器区域较大的弧度提供一个无限的抓地性,具综合性的超平顺和轻快的滑行感觉。
摇椅传送带一条炭纤维带子水平的放置在木芯下面,在每款摇椅雪板上创造出一个轻微凸起的板底。
从上铁杆儿到呲铁杆滑行都变得更平顺了。
摇滚威士忌位于脚跟和脚尖下面的4片玄武岩薄片直接将滑
手的能量传递到雪板上的关键控制区域。
同时也使强度和全地形的边刃控制得到加倍,并且不会影响到滑行的平顺。
I-ROCK 摇椅凸起板底的摇椅拱形在铁杆上更自然的感觉,在
多边的情况下也能保持稳定。
在固定器区域的外侧结合了反弓,I-ROCK提供了稳定和反弓的弹性,使之拥有了从高山到公园的性能。
EZ-ROCK 固定器之间超微小的凸起摇椅板底和固定器区域外侧反弓提供了独一无二的稳定。
无论你将固定器安装在哪,压板都非常容易和稳定。
POP-CAM 三段式的反弓使之成为市场上最有
趣的反弓结构。
脚下还是传统反弓,固定器之间是平面,这种特有的设计增大冰面的抓地性,在野雪也有更好的漂浮性呲杆儿更稳定。
4000烧结最快,超硬,雪蜡高吸收性和高耐久性。
四向纤维(0/30)有着最多的纤维部署,从板头到板尾每30度方向,这种矩阵在提供了大量的弹力和自由扭力同时将固定器的力量分散到了一个更大片
的区域。
ABT 板底扩展技术(ABT)是第一款3D扩展板底并可以适应任何地形的技术。
我们嵌入了硅胶来吸收冲击力,降低抖动并提供最平稳的滑行。
ABT移动自然,提供一个更加稳定的平台,无论是跳台着陆,呲铁杆还是在个总雪况下滑行。
DT侧切将两条回转半径组合.一条弧度大的边刃适合快速,灵敏的回转,再混合一条弧度小的半径在板头板尾之外,用以对付更艰难的地形,高速度,在跳跃的同时也拥有很好的容错性.
有方向性的纯双向;让你有机会选择有一些后置滑行或者双向滑行。
固定器安装孔后置,木芯会侧重板尾弹性,板头在野雪里更好滑行一些。
TRUFLEX木芯TRUFLEX木芯和Reflex木芯相似,TRUFLEX木芯技术特有高强度-重量比木芯结构,利用不同密度的杨木的不同属性,在你做各种滑行的时候给你提供优秀的全能响应。
威士忌X技术配置了4片可以增加强度和减震的钛合金盘片,他们之间通过竹子和预固化的纤维连接。
不同材料物质的组合造就了超级平顺和轻松的滑行。
PDT(渐进DT)边刃拥有3段边刃,固定器区域是平的,两脚之间
有不同的弧度设计,弧度小的是为Pow-Rock,弧度大的是为Pow-Cam。
组合了一条渐进的弧线和小弧度的板头,PTD提供了一个冲浪般的滑行和无与伦比的抓地性。
钢筋威士忌独特的V字形设计,使用4条碳纤维释放增加扭力和急扭边刃力量,同时使抖动最小化。
POW-ROCK
依靠两个反弓区域和一个柔和的弓形带凸起的板底使你触雪的表面积最大化,在深厚的野雪里有更好的漂浮性。
在任何雪况下都能增加弹性和稳定性。
POW-CAM
带有摇椅板头的三段式反弓适合野雪并兼具反弓的抓地性和弹性。
脚下是传统反弓,固定器之间是平面,这加大了冰面的抓地性,并在野雪有更好的漂浮性。
释放无限的力量和回转性能。
EZ-Flat ROCK
平面反弓并,安装孔外侧带有少许摇椅的板头板尾,让滑行平顺稳定,并降低抖动。