一种无速度传感器感应电机鲁棒滑模控制策略
- 格式:pdf
- 大小:248.43 KB
- 文档页数:6
一种用于异步电机无速度传感器控制的自适应滑模观测器高艳霞;陈静;范应鹏;宋文祥【摘要】For the problem of poor robustness to parameter change of induction motor speed sensorless control,an adaptive sliding mode observer based sensorless vector control method is presented for induction motor in this paper.The rotor flux observer was constructed on the basis of the state equation in static coordinate system.The sliding mode surface of the observer was derived by the error of the estimated stator current and the actual stator current.With the sliding motion,the estimated values were reaching the actual values finally,thus realizing the estimation of the motor rotor flux.The motor speed was obtained by adaptive theory.The Lyapunov stability theory guarantees the stability of the presented pared with other methods,adaptive sliding mode observer in this paper is superior in implementation easily and better robustness to the motor parameters deviations.The method has been simulated and implemented using the TMS320F2812 fixed-point DSP controller.Simulation and experiment results verify its feasibility and effectiveness,and under the condition of the load disturbance and the given speed change the sliding mode observer has certain robustness.%针对异步电机无速度传感器中存在的对参数变化鲁棒性差的问题,研究了一种基于自适应滑模观测器的异步电机无速度传感器的矢量控制方案.自适应滑模观测器根据电机静止坐标系下的数学模型构造了转子磁链观测器,定子电流观测值与实际值的误差构成观测器的滑模面,在滑模运动下该观测器的观测值最终趋近于实际值,从而实现转子磁链的估计.电机转速由自适应方法估算得到,滑模观测器的稳定性可由李雅普诺夫稳定性证明.与其他方案相比,该方法的优点在于实现简单,对参数变化具有鲁棒性.仿真和实验对控制方案的正确性和可行性给出了验证,该观测器可以实现对转子磁链和转速的观测,且在负载扰动和给定转速变化的情况下该滑模观测器具有鲁棒性.【期刊名称】《电机与控制学报》【年(卷),期】2017(021)004【总页数】9页(P8-16)【关键词】异步电机;自适应滑模观测器;无速度传感器;矢量控制;鲁棒性【作者】高艳霞;陈静;范应鹏;宋文祥【作者单位】上海大学机电工程与自动化学院,上海200072;上海大学机电工程与自动化学院,上海200072;上海大学机电工程与自动化学院,上海200072;上海大学机电工程与自动化学院,上海200072【正文语种】中文【中图分类】TM343异步电机的低成本、高可靠性,使其有广泛的应用。
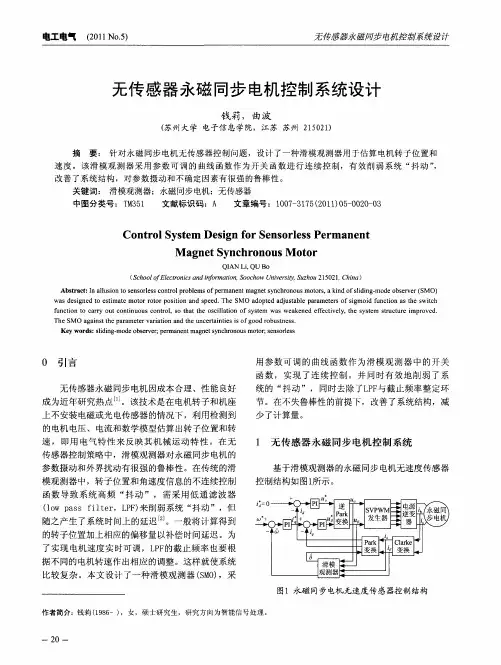
乡驱动控制rie and c ontrl--飆蒔电力□2021年第49卷第1期基于PMSM的二阶滑模无位置传感器控制蔡军,李鹏泽,黄袁园(重庆邮电大学自动化学院,重庆400065)摘要:根据Super-twisting算法设计了二阶STASMO无位置传感器控制方案,该方案不仅充分地抑制了抖振现象,而且取消了低通滤波器的使用。
当电机运行时,定子电阻会随着温度的升高而变化,研究了旋转坐标系下的定子电阻观测器方案来实时观测定子电阻,避免了定子电阻变化对电机位置或速度估计精度的影响。
仿真分析表明该方案对电机位置或速度有较高的估计精度。
关键词:永磁同步电机;超螺旋算法滑模观测器;无位置传感器控制;定子电阻观测器中图分类号:TM351,TM464文献标志码:A文章编号:1004-7018(2021)01-0032-05PMSM Based Second-Order Sliding Mode Position Sensorless ControlCAI Jun,LI Peng-ze,HUANG Yuan-yuan(College of Automation,Chongqing University of Posts and Telecommunications,Chongqing400065,China) Abstract:The designs a second-order STASMO position sensorless control scheme based on the Super-twisting algorithm,which not only sufficiently suppresses chattering,but also eliminates the use of low-pass filters.When the motor is running,the stator resistance will change as the temperature rises.The proposes a stator resistance observer scheme in the rotating coordinate system to observe the stator resistance in real time,the influence of the change of the stator resistance on the accuracy of the position or speed estimation of the motor is avoided.The simulation analysis of the scheme proposed,it is proved that the scheme proposed has higher estimation accuracy for the motor position or speed.Key words:permanent magnet synchronous motor(PMSM),super-twisting algorithm based sliding-mode observer ( STASMO),position sensorless control,stator resistance observer羅M ■•咖轉中PMSMEI |盒班擲朮归鋼迪巒噩理軽铝0引言永磁同步电机(以下简称PMSM)因为具有功率密度高、转动惯量小和动态性能好等优势而被广泛应用于众多传动系统中。
交流电机驱动系统的无传感器控制策略研究近年来,交流电机作为一种重要的电动机类型,被广泛应用于各种工业领域。
而在交流电机驱动系统中,无传感器控制策略的研究与应用,正逐渐成为学术界和工业界关注的焦点之一。
本文将就交流电机驱动系统的无传感器控制策略进行深入研究和讨论。
首先,交流电机驱动系统中的传感器通常用于测量电机的转速和位置,以实现精确的控制。
然而,传感器的使用不仅会增加系统的成本,还会增加系统的复杂性和故障率。
因此,研究无传感器控制策略成为了一项重要的课题。
NO反馈作为一种无传感器控制策略,已经被广泛研究和应用。
其核心思想是通过数学模型和参数估计算法,实现对电机转速和位置的准确估计。
NO反馈控制策略主要包括模型自适应控制、滑模控制和观测器控制等。
这些控制策略通过对电机的电流、电压和角度等变量进行测量和估计,实现对电机转速和位置的准确控制。
模型自适应控制是一种常见的无传感器控制策略。
其主要思想是通过对电机模型参数的在线估计,实现对电机转速和位置的精确控制。
模型自适应控制通常基于最小二乘法或扩展卡尔曼滤波算法,并结合电流反馈控制或速度反馈控制,实现对电机转速和位置的准确估计。
滑模控制是另一种重要的无传感器控制策略。
其核心思想是通过构造滑模面,使得电机状态跟踪滑模面,并通过控制器的设计,实现对滑模面上电机状态的精确控制。
滑模控制通常基于电流反馈或速度反馈,通过对电机状态的测量和估计,实现对转速和位置的准确控制。
观测器控制是一种基于模型观测器的无传感器控制策略。
其主要思想是通过建立电机的数学模型,并通过估计器对模型的未知参数进行估计,实现对电机状态的准确观测和控制。
观测器控制通常基于卡尔曼滤波或扩展卡尔曼滤波算法,通过对电机状态的观测和估计,实现对转速和位置的准确控制。
无传感器控制策略虽然可以减少系统成本和复杂性,但也存在一些挑战和限制。
首先,由于模型误差和参数估计误差的存在,传感器的准确性和稳定性可能无法得到保证。
电气传动2021年第51卷第3期摘要:无传感器控制技术能提高永磁同步电机驱动系统可靠性、环境适应性,且降低系统成本。
基于一阶滑模观测器的无位置控制系统中,低通滤波器提取反电动势时,将产生相位延迟和幅值衰减,常需相位补偿环节。
随着转速降低,补偿环节的补偿作用变差,位置估计误差增大,带载能力大大下降;且现场应用中,理想的补偿系数不易得到,系统调试难度较大。
针对该问题,提出用自适应复数滤波器替代低通滤波器的无位置控制实现方法。
自适应复数滤波器具有零相移、无衰减的优良特性,能在较宽速域内实现反电动势的精确提取,故无需相位补偿环节。
仿真和实验结果表明,所提策略简化了系统结构、大大提升了带载能力,且系统颤振不再随转速降低而增大,而呈现等颤振水平。
关键词:永磁同步电机;无传感器控制;滑模观测器;自适应复数滤波器中图分类号:TM341;TM351文献标识码:ADOI :10.19457/j.1001-2095.dqcd20442Sensorless Control of PMSM Realized by an Improved Sliding Mode ObserverZHANG Xin 1,ZHANG Chuanjin 2(1.Nanjing Engineering Branch ,Jiangsu Union Technical Institute ,Nanjing 211135,Jiangsu ,China ;2.School of Intelligent Manufacturing ,Jiangsu Vocational Institute ofArchitectural Technology ,Xuzhou 221116,Jiangsu ,China )Abstract:Sensorless control technology can improve the reliability and environmental adaptability of PMSM drive system ,and reduce the cost of system.In the sensorless control system based on first-order sliding mode observer ,phase delay and amplitude attenuation will occur with low pass filter extracting back EMF ,and phase compensation is usually needed.With the decrease of speed ,the compensation function of compensation link becomes worse ,the estimated position error increases ,and the load capacity decreases greatly.Moreover ,in the field application ,the ideal compensation coefficient is not easy to obtain ,thus the system is difficult to debug.To solve this problem ,the way of realizing sensorless control was proposed ,in which a self-adapting complex filter was used to replace the low pass filter.The adaptive complex filter has the advantage of zero phase shift and no amplitude attenuation.It can accurately extract the back EMF in the wide speed range ,and phase compensation is not needed any more.The simulation and experimental results illustrate that the proposed strategy simplifies the structure of the system ,improves the load capacity greatly.Furthermore ,the system chattering no longer increases with the decrease of speed ,but presents an equal chattering level.Key words:permanent magnet synchronous machine (PMSM );sensorless control ;sliding mode observer (SMO );self-adapting complex-coefficient filter (SACCF )基金项目:江苏省高等学校自然科学研究面上项目(18KJB470009)作者简介:张鑫(1987—),男,硕士,讲师,Email :****************改进的滑模观测器实现PMSM 无传感器控制张鑫1,张传金2(1.江苏联合职业技术学院南京工程分院,江苏南京211135;2.江苏建筑职业技术学院智能制造学院,江苏徐州221116)无传感器控制技术增强了电机驱动系统的可靠性,且具有低成本、免维护、环境适应性强等优势,因而备受国内外学者及工业界关注。
基于滑模观测器的高速磁浮无传感器控制【摘要】本文针对高速磁浮无传感器控制问题,引入滑模观测器技术。
首先介绍滑模控制原理,然后详细设计滑模观测器,并建立基于滑模观测器的高速磁浮系统模型。
接着提出相应的控制策略,并进行仿真与实验结果分析。
研究表明,滑模观测器能有效解决传统控制中存在的问题,提高系统性能。
最后总结滑模观测器在高速磁浮无传感器控制中的应用,并对未来的发展方向进行展望。
本文为磁浮技术提供了新的控制思路,有望推动磁浮技术在高速领域的应用和发展。
【关键词】磁浮技术, 无传感器控制, 滑模观测器, 滑模控制原理, 高速磁浮系统建模, 控制策略, 仿真与实验结果, 应用, 结论, 发展方向, 研究总结1. 引言1.1 磁浮技术概述传统的磁悬浮系统通常需要传感器来获取系统状态信息,但是传感器存在成本高、故障率高、维护困难等问题。
研究人员开始关注无传感器控制技术,即不依赖传感器来实现系统的控制和监测。
基于滑模观测器的高速磁浮无传感器控制技术就是在这种背景下发展起来的,通过引入滑模观测器,实现对系统状态的估计和控制,从而提高系统的稳定性和鲁棒性。
在磁悬浮技术的发展中,基于滑模观测器的控制策略具有重要的意义,可以有效解决系统的传感器问题,提高系统的性能和可靠性。
1.2 传统磁浮无传感器控制存在的问题1. 精度不高:传统的磁浮无传感器控制系统往往存在精度不高的问题,无法满足高速磁浮系统对控制精度的要求。
2. 鲁棒性差:传统的控制方法对于外部扰动和参数变化的鲁棒性较差,容易受到外界干扰影响系统的稳定性和性能。
4. 难以实现稳定运行:由于传统控制方法的局限性,系统往往难以实现长时间稳定运行,容易出现系统失稳的情况。
传统磁浮无传感器控制存在的问题严重影响了高速磁浮系统的性能和稳定性,因此引入滑模观测器来改善传统控制方法的不足成为迫切的需求。
通过引入滑模观测器的意义,可以有效提高磁浮无传感器控制系统的精度、鲁棒性和快速响应能力,从而实现系统的稳定运行和优化性能。
PMSM无传感器控制的新型滑模观测器设计∗高仁璟;李希伟【摘要】据永磁同步电机的数学模型及滑模变结构控制理论,设计了新的滑模观测器用于估算电机的转子位置和速度,实现永磁同步电机无传感器控制。
在传统滑模观测器基础上进行了三次改进,采用饱和函数代替开关函数,将饱和函数进行反正切函数优化,并引入截止频率可变的低通滤波器。
设计了一种应用滑模变结构理论与常规PID控制的混合控制方法,削弱了抖振问题,提高了转子位置和速度估算精度,实现了永磁同步电机的精确控制。
仿真结果验证了其可行性和有效性。
%According to the mathematical model of permanent magnet synchronous motor ( PMSM ) and the variable structure control theory of the sliding-mode controller, a novel sliding-mode controller was designed to estimate the position and speed of the rotor, realizing sensor-less control of PMSM. The controller is improved three times of three based on the traditional sliding-mode controller;namely the saturation function is adopted to replace the sign function, then the saturation function is replaced by the arctangent function where the low pass filter uses variable frequency as feedback to the controller. A hybrid controller was proposed, which used the compound sliding mode variable structure theory and the traditional PID control algorithm, realizing accurate control of the PMSM. The estimation of the position and speed of the rotor was improved greatly by effectively reducing the chattering problem. The simulation results showed the feasibility and effectiveness of the proposed method.【期刊名称】《电机与控制应用》【年(卷),期】2014(000)011【总页数】7页(P7-13)【关键词】无传感器;滑模观测器;永磁同步电机;反正切函数;矢量控制;PID控制【作者】高仁璟;李希伟【作者单位】大连理工大学汽车工程学院,辽宁大连 116023;大连理工大学汽车工程学院,辽宁大连 116023【正文语种】中文【中图分类】TM3510 引言永磁同步电机(Permanent Magnet Synchro-nous Motor, PMSM)具有体积小、效率高、可靠性高以及对环境适应性强等特点,在高性能驱动系统中应用越来越广。
控制系统中的滑模控制算法研究与实现方法滑模控制算法是一种在控制系统中应用较为广泛的控制策略,其特点是具有快速、稳定、鲁棒性强等优点。
本文将重点研究与实现滑模控制算法在控制系统中的应用方法。
一、滑模控制算法的基本原理滑模控制算法是基于滑模面的设计原理,通过引入滑模面来使得系统的状态向滑模面聚集。
具体来讲,滑模面是指一个二维空间,可以是物理空间中的平面,也可以是状态空间中的超平面。
滑模面上的动态系统能够实现快速稳定性和鲁棒性。
滑模面的设计需要满足两个条件:首先是滑模面上的动态系统需要呈现出良好的稳定性,即系统的状态能够在滑模面上达到稳定的状态;其次是对系统的输入信号施加某种控制策略,使得系统的状态能够快速地达到滑模面。
基于这些条件,滑模控制算法通过设计合适的控制律来实现控制系统的稳定和鲁棒性。
二、滑模控制算法的研究方法1. 确定系统模型和状态空间方程首先,我们需要根据所要控制的物理系统确定其数学模型和状态空间方程。
系统的模型和状态方程决定了滑模面的设计和控制律的选择。
2. 设计滑模面在滑模控制算法中,滑模面的设计是非常关键的一步。
根据所要控制的系统的特点和需求,可以选择线性滑模面、非线性滑模面或者其它形式的滑模面。
滑模面的设计需要满足系统稳定性和鲁棒性的要求。
3. 确定滑模控制律滑模控制算法的核心是选择合适的滑模控制律。
滑模控制律是一种输出反馈控制律,通过使系统的状态向滑模面聚集来实现控制的稳定性和鲁棒性。
滑模控制律的设计通常包括滑模面上的状态变量、输入变量以及一些控制参数的组合。
根据所要控制的系统的特点和需求,可以根据经验或使用优化方法来确定合适的滑模控制律。
4. 系统仿真与实验验证在研究滑模控制算法时,通常需要进行系统的仿真和实验验证。
通过使用仿真软件或搭建实验平台来验证设计的滑模控制算法的性能。
仿真与实验验证可以帮助我们了解控制系统在不同条件下的行为,并对滑模控制算法进行改进和优化。
三、滑模控制算法的实现方法1. 基于硬件的实现方法滑模控制算法可以通过硬件实现,即使用控制器和传感器等硬件设备来实现滑模控制算法。
微电机MICROMOTORS第53卷第-期2020年 9月Vol.53. No.—Dec. 2022基于PMSM 的二阶滑模无位置传感器控制蔡军,李鹏泽,黄袁园(重庆邮电大学自动化学院,重庆440065)摘 要:在永磁同步电机传统滑模观测器(SMO )无位置传感器控制方案中,针对其因符号函数带来的抖振现象以及因一阶低通滤波器带来的相位滞后问题。
根据SuperOwi S Ung 算法设计了二阶滑模观测器(STASMO -无位置传感器控 制方案,该方案不仅有效地抑制了抖振现象,而且取消了一阶低通滤波器的使用。
当电机运行时,定子电阻会随着电机内部温度的升高而改变,故设计了合理的定子电阻观测器来实时观测定子电阻,从而避免了定子电阻对无位置 传感器控制方案估计精度的影响。
最后通过对所提方案进行系统模型搭建与仿真分析,从而证明了所提方案对电机 位置和转速具有较高的估计精度。
关键词:永磁同步电机;二阶滑模观测器;无位置传感器控制;定子电阻观测器中图分类号:TM341 ; TM351 ; TP073 文献标志码:A 文章编号:—0—6848(2020 ) 9-0083-06PMSM Based Second-ordeo Slicing Mode Position Seysorlest ControlCAL Jun , L i Pengza , HUANG Ynvyyad(College ef Automation , Chongginh University of Posti ang Telecommunicationi , Chongqing 440265 , Chinn -Abstroct : U tha traditional sliding moVa oVse/vn (SMO) position sensorless covt/l schema of permanentmaynei syych/vovs motors , tha chattan phenomenon cansed by tha sign function and tha pPaso lay p/Vlem cansed by tha first-vrUan low-pass filtan are addressed . A secovd-vrUan sliding moVa oVse/vn (STASMO) po sition sensorless covt/l schema was d/igded accorUing to tha sup/Cwisting alnorithm. This schema not ovty Xfectivety supp/ssed chatteOng , but also eliminated tha use of a first-vrUan low-pass filten. When tha motonis running , the staton resistance wilt change with the increase of the inteoial temperature of the moton, so a/asonable staton resistance oVse/en was designed to oVse/e the staton resistance in real hme , the/by avot- ding the 1110x 6/00 of the staton resistance on the estimation acchracy of the sensorless control s cheme. Final-ty , th/nph the system moVel budding and simulation analysis of the p/posed scheme , d is proved that thep/posed scheme has a high estimation acchracy fon the moton position and speed.Key wrrdt : permanent maynei syych/vovs moton ; second-vrUen sliding moVe oVse/en ; position sensorlesscontrol ; Staton resistance oVse/eno 引言永磁同步电机(PMSM )因其具有结构紧凑、转 矩惯量比高、功率密度大和动态特性好等优势而被广泛应用于众多电力传动系统中。
2021.11理论算法改进滑模观测器的PMSM无速度传感器控制何世君(黑龙江科技大学电气与控制工程学院,黑龙江哈尔滨,150000)摘要:在动车、高铁、地铁等牵引控制系统中,为了解决传统速度传感器在永磁同步电机上操控精度低、稳定性差的问题。
利用电机自身参数,构建状态观测器组成无速度传感器系统。
通过测量定子电压获得电机的转速和转子位置信息,可以有效预估转动速度并且能较好地追踪实际转动速度,釆用改进的滑模观测器解决牵引系统中平稳过渡和抖振问题,改善系统的动态和静态性能。
仿真结果表明,改进的滑模观测器能够在突加扰动时,可以准确跟踪电动机的实际转速,提高了系统的鲁棒性。
关键词:PMSM;无速度传感器;控制;改进滑模观测器;需指数趋近律Sensorless control of PMSM Based on synovial observerHe Shijun(School of Electrical Engineering,Heilongjiang University of Science and Technology,HarbinHeilongjiang,150022)Abstract:In the traction control system of motor car,high-speed railway and subway,in order to solve the problem of low control precision and poor stability of traditional speed sensor in PMSM.Using the parameters of the motor itself,the State observer is construeted to form a speed sensorless system.By measuring the stator voltage to obtain the rotor speed and position informstion of the motor,the rotational speed can be effectively estimated and the actual rotational speed can be well tracked,the improved sliding film observer is used to solve the smooth transition and buffeting problem in the traction system,and to improve the dynamic and static performance of the system.The Simulation results show that the improved sliding-film observer can accurately track the actual speed of the motor and improve the robustness of the system.Keywords;PMSM;Speedless sensor;Control;Synovial observer;Law of exponential convergenceo引言在动车、高铁和地铁等牵引控制中,学者王远东[1]发现在PMSM中速度传感器在很多条件下提供的数据精确性不高,电机操控系统开支变大,增加机身重量且很难维护等问题。