空间数据索引算法
- 格式:ppt
- 大小:1.52 MB
- 文档页数:70
GIS常见的基本算法GIS(地理信息系统)领域中使用的基本算法非常多样化,可以分为数据处理算法、空间分析算法和地理可视化算法等方面。
以下是一些常见的基本算法:1.地图投影算法:地图投影是将地球表面上的经纬度坐标映射到平面坐标系上的过程。
常见的地图投影算法包括经纬度转换为平面坐标的算法,如墨卡托投影、等距圆柱投影、兰勃托投影等。
2.空间索引算法:空间索引算法是对空间数据进行高效存储和检索的关键。
常见的空间索引算法包括四叉树、R树、k-d树等。
这些算法能够将空间数据分割成多个子区域,并建立索引结构,以便在查询时快速定位目标数据。
3.空间插值算法:空间插值算法用于在已知或有限的观测点上估算未知点的值。
常见的空间插值算法包括反距离加权插值(IDW)、克里金插值和径向基函数插值等。
4.空间分析算法:空间分析算法用于研究地理现象之间的空间关系。
常见的空间分析算法包括缓冲区分析、空间叠置分析、网络分析、空间聚类分析等。
5.地图匹配算法:地图匹配是将实际观测点与地理信息数据库中的地理对象进行匹配的过程。
常见的地图匹配算法包括最短路径算法、马尔可夫链算法、HMM(隐马尔可夫模型)等。
6.空间平滑算法:空间平滑算法用于消除地理数据中的噪声和不规则性。
常见的空间平滑算法包括高斯滤波、均值滤波、中值滤波等。
7.空间插值算法:空间插值算法用于对连续型地理现象进行预测和估计。
常见的空间插值算法包括反距离加权插值(IDW)、克里金插值和径向基函数插值等。
8.地理网络算法:地理网络算法用于在地理网络上找到最短路径、最小生成树等。
常见的地理网络算法包括迪杰斯特拉算法、弗洛伊德算法等。
9.地理可视化算法:地理可视化算法用于将地理信息以可视化的形式展现出来。
常见的地理可视化算法包括等值线绘制算法、色彩映射算法、3D可视化算法等。
10.遥感图像分类算法:遥感图像分类是将遥感图像中的像素分配到不同的类别中的过程。
常见的遥感图像分类算法包括最大似然分类、支持向量机(SVM)分类、随机森林分类等。
空间索引算法随着科技的不断发展,数据量的急剧增加,如何高效地存储和检索数据成为了一个重要的问题。
在空间数据检索领域,空间索引算法是一种常用的解决方案。
本文将介绍空间索引算法的基本概念、分类和应用。
一、基本概念空间索引算法是一种将空间数据组织成索引结构以便快速检索的算法。
其基本思想是将空间数据划分为若干个空间单元,将数据存储在相应的单元内,并建立索引来加速检索。
空间单元的划分方式和索引结构的设计是空间索引算法的核心内容。
二、分类根据空间单元的划分方式和索引结构的设计,可以将空间索引算法分为以下几类。
1.基于网格的算法基于网格的算法是将空间数据划分为规则的网格单元,每个单元内存储相应的数据对象。
网格单元的大小可以根据数据密度和查询需求进行调整。
常见的网格单元有正方形和六边形。
基于网格的算法包括Quadtree、Octree、R-Tree等。
Quadtree是一种将空间划分为四叉树的算法,每个节点代表一个正方形空间单元。
从根节点开始,将空间逐级划分为四个子节点,直到每个节点内只包含一个数据对象。
查询时,从根节点开始递归遍历四叉树,找到与查询范围相交的节点,将其子节点加入遍历队列,直到队列为空。
Quadtree适用于二维空间数据的存储和检索。
Octree是一种将空间划分为八叉树的算法,每个节点代表一个立方体空间单元。
从根节点开始,将空间逐级划分为八个子节点,直到每个节点内只包含一个数据对象。
查询时,从根节点开始递归遍历八叉树,找到与查询范围相交的节点,将其子节点加入遍历队列,直到队列为空。
Octree适用于三维空间数据的存储和检索。
R-Tree是一种将空间划分为多维矩形的算法,每个节点代表一个矩形空间单元。
从根节点开始,将空间逐级划分为多个子节点,直到每个节点内只包含一个数据对象或者达到最大容量。
查询时,从根节点开始递归遍历R-Tree,找到与查询范围相交的节点,将其子节点加入遍历队列,直到队列为空。
R-Tree适用于多维空间数据的存储和检索。
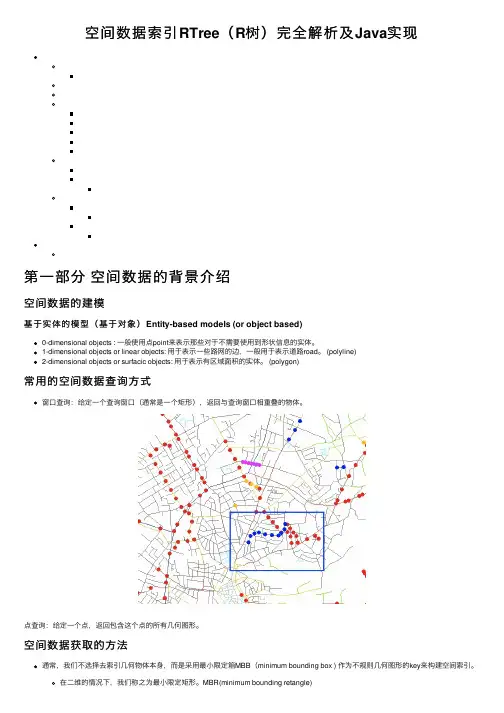
空间数据索引RTree(R树)完全解析及Java实现第⼀部分空间数据的背景介绍空间数据的建模基于实体的模型(基于对象)Entity-based models (or object based)0-dimensional objects : ⼀般使⽤点point来表⽰那些对于不需要使⽤到形状信息的实体。
1-dimensional objects or linear objects: ⽤于表⽰⼀些路⽹的边,⼀般⽤于表⽰道路road。
(polyline)2-dimensional objects or surfacic objects: ⽤于表⽰有区域⾯积的实体。
(polygon)常⽤的空间数据查询⽅式窗⼝查询:给定⼀个查询窗⼝(通常是⼀个矩形),返回与查询窗⼝相重叠的物体。
点查询:给定⼀个点,返回包含这个点的所有⼏何图形。
空间数据获取的⽅法通常,我们不选择去索引⼏何物体本⾝,⽽是采⽤最⼩限定箱MBB(minimum bounding box ) 作为不规则⼏何图形的key来构建空间索引。
在⼆维的情况下,我们称之为最⼩限定矩形。
MBR(minimum bounding retangle)三维的情况下,我们称最新限定箱MBB(minimum bounding box)通过索引操作对象的MBB来进⾏查询⼀共分为两步Filtering: 过滤掉MBB不相交的数据集,剩下的MBB被索引到的称为⼀个数据的超集。
Refinement: 测试实际的⼏何形状会不会满⾜查询条件,精确化。
如何⽤数据表⽰⼀个MBR通常,我们只需要两个点就可限定⼀个矩形,也就是矩形某个对⾓线的两个点就可以决定⼀个唯⼀的矩形。
通常我们使⽤(左下,右上两个点表⽰)或者使⽤右上左下,都是可以的。
表⽰⼀个点的数据: public class Point{ //⽤⼀个类来表⽰⼀个点 public Float x; public Float y } 表⽰⼀个MBR的数据 public class MBR{ public Point BottomLeft; public Point TopRight; }如何判断两个MBR是否相交? >如果⼀个MBR的TopLeft或者BottomRight的(x,y)位于另⼀个MBR的xRange和yRangle⾥⾯,则说明这两个MBR相交。
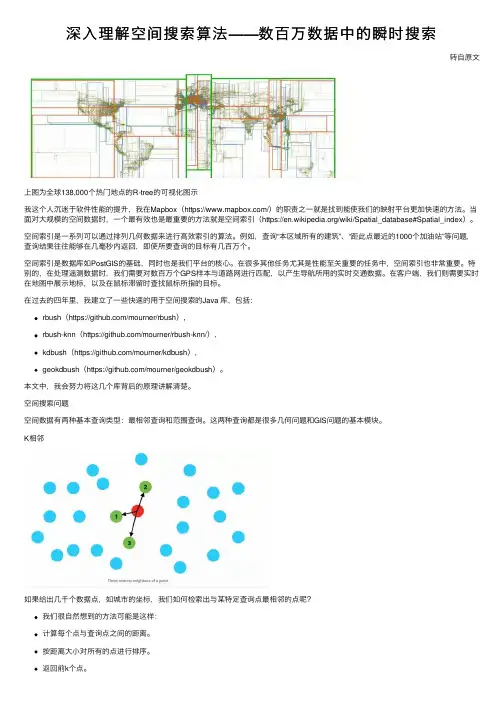
深⼊理解空间搜索算法——数百万数据中的瞬时搜索转⾃原⽂上图为全球138,000个热门地点的R-tree的可视化图⽰我这个⼈沉迷于软件性能的提升,我在Mapbox(https:///)的职责之⼀就是找到能使我们的映射平台更加快速的⽅法。
当⾯对⼤规模的空间数据时,⼀个最有效也是最重要的⽅法就是空间索引(https:///wiki/Spatial_database#Spatial_index)。
空间索引是⼀系列可以通过排列⼏何数据来进⾏⾼效索引的算法。
例如,查询“本区域所有的建筑”、“距此点最近的1000个加油站”等问题,查询结果往往能够在⼏毫秒内返回,即使所要查询的⽬标有⼏百万个。
空间索引是数据库如PostGIS的基础,同时也是我们平台的核⼼。
在很多其他任务尤其是性能⾄关重要的任务中,空间索引也⾮常重要。
特别的,在处理遥测数据时,我们需要对数百万个GPS样本与道路⽹进⾏匹配,以产⽣导航所⽤的实时交通数据。
在客户端,我们则需要实时在地图中展⽰地标,以及在⿏标滞留时查找⿏标所指的⽬标。
在过去的四年⾥,我建⽴了⼀些快速的⽤于空间搜索的Java 库,包括:rbush(https:///mourner/rbush),rbush-knn(https:///mourner/rbush-knn/),kdbush(https:///mourner/kdbush),geokdbush(https:///mourner/geokdbush)。
本⽂中,我会努⼒将这⼏个库背后的原理讲解清楚。
空间搜索问题空间数据有两种基本查询类型:最相邻查询和范围查询。
这两种查询都是很多⼏何问题和GIS问题的基本模块。
K相邻如果给出⼏千个数据点,如城市的坐标,我们如何检索出与某特定查询点最相邻的点呢?我们很⾃然想到的⽅法可能是这样:计算每个点与查询点之间的距离。
按距离⼤⼩对所有的点进⾏排序。
返回前k个点。
当有⼏百个数据点时我们可以⽤这种⽅法,但是当我们⾯临数百万的数据点时,这种⽅法就显得太慢且⽆法应⽤到实际情景。
索引方法:网格索引——点要素(图元),线、面要素,有冗余四叉树索引——线、面要素,有冗余改进的四叉树索引——线、面要素R树——空间重叠一、网格索引,四叉树索引在介绍空间索引之前,先谈谈什么叫“索引“。
对一个数据集做”索引“,是为了提高对这个数据集检索的效率。
书的”目录“就是这本书内容的”索引“,当我们拿到一本新书,想查看感兴趣内容的时候,我们会先查看目录,确定感兴趣的内容会在哪些页里,直接翻到那些页,就OK了,而不是从第一章节开始翻,一个字一个字地找我们感兴趣的内容,直到找到为止,这种检索内容的效率也太低了,如果一本书没有目录,可以想象有多么不方便…可见书的目录有多重要,索引有多重要啊!现在大家对索引有了感性认识,那什么是“空间索引“呢?”空间索引“也是”索引“,是对空间图形集合做的一个”目录“,提高在这个图形集合中查找某个图形对象的效率。
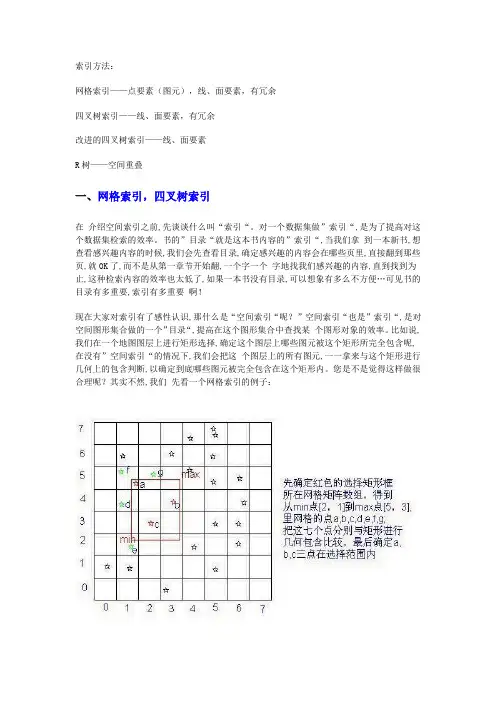
比如说,我们在一个地图图层上进行矩形选择,确定这个图层上哪些图元被这个矩形所完全包含呢,在没有”空间索引“的情况下,我们会把这个图层上的所有图元,一一拿来与这个矩形进行几何上的包含判断,以确定到底哪些图元被完全包含在这个矩形内。
您是不是觉得这样做很合理呢?其实不然,我们先看一个网格索引的例子:我们对这个点图层作了网格索引,判断哪些点在这个矩形选择框内,是不需要把这个图层里所有的点都要与矩形进行几何包含运算的,只对 a,b,c,d,e,f,g这七个点做了运算。
可以推想一下,如果一个点图层有十万个点,不建立空间索引,任何地图操作都将对整个图层的所有图元遍历一次,也就是要For循环10万次;建立索引将使得For循环的次数下降很多很多,效率自然提高很多!呵呵…想必大家都知道空间索引的好处了,也不知不觉向大家介绍了点图层的网格索引,还有哪些常用的空间索引呢?这些空间索引又该如何实现呢?带着这样的问题,下面介绍几种常用的空间索引。
网格索引网格索引就是在一个地图图层上,按每个小网格宽△w,高△h打上均匀的格网,计算每个图元所占据的网格或者所经过的网格单元集合,在这些网格单元中,记录下图元对象的地址或者引用,比如:声明一个对象二维数组List grid[m][n]; m代表网格的行数,n代表网格的列数,每个数组元素为一个“集合对象”,用于存储这个网格单元所关联的所有图元的地址或引用,这样网格索引就建立好了。
qgis空间索引用法QGIS是一款功能强大的开源地理信息系统软件,它支持各种空间数据的处理和分析。
空间索引是其中一个重要的功能,在处理大型空间数据时,能够提高查询和分析的效率。
本文将介绍QGIS中空间索引的使用方法。
一、什么是空间索引空间索引是一种数据结构,用于加快对空间数据的查询速度。
它可以通过将空间数据划分为多个格网或栅格,以便快速定位和检索特定区域的数据。
空间索引可以应用于各种空间数据类型,包括点、线、面等。
二、为什么使用空间索引当处理大型空间数据集时,传统的查询方式可能会非常缓慢,特别是需要筛选特定区域的数据时。
空间索引可以大大提高查询效率,减少数据处理时间。
同时,它还可以支持一些高级的空间分析操作,例如空间连接、空间查询等。
三、QGIS中的空间索引插件QGIS提供了多个空间索引插件,可以根据不同的需求选择使用。
以下简要介绍一些常用的空间索引插件:1. Spatial IndexSpatial Index是QGIS的默认空间索引插件,它使用了R树算法来构建空间索引。
可以在QGIS软件的插件管理器中找到并安装该插件。
使用Spatial Index插件,可以为任意矢量图层创建空间索引,并且可以通过选择合适的索引类型和参数来优化索引性能。
2. SAGA GISSAGA GIS是一款功能强大的地理信息系统软件,它也提供了一些空间索引功能。
可以通过QGIS的插件管理器安装SAGA GIS插件,并在SAGA工具箱中使用相关的空间索引工具。
3. PostGISPostGIS是一个开源的空间数据库扩展,它与PostgreSQL数据库系统紧密结合。
通过使用PostGIS,可以在PostgreSQL数据库中创建和管理空间索引,然后在QGIS中加载和查询这些索引。
四、空间索引的创建和管理在QGIS中创建和管理空间索引非常简单。
以下是一个简单的示例:步骤1:创建一个矢量图层,例如一个点图层。
步骤2:选择图层,并右键单击,在上下文菜单中选择“属性”选项。
空间索引原理在计算机科学领域中,空间索引是用于管理和查询空间对象的一种数据结构。
它的作用是将具有空间延伸的数据组织在一起,使得查询操作更加高效。
空间索引是空间数据库技术的核心,通常被应用于地理信息系统、遥感技术和计算机图形学等领域。
这篇文章将介绍空间索引的原理和常用的空间索引结构。
空间索引结构通常由两个部分组成:空间索引节点和数据节点。
空间索引节点包含了对数据节点的引用,而数据节点则包含了对实际数据的引用。
空间索引节点通常按照一定的规则来组织,以便于查询操作的执行。
下面我们将介绍一些常用的空间索引结构。
1. R树R树是一种高效的空间索引结构,它主要针对范围查询这种场景进行优化。
R树的每个节点都表示一个矩形范围,而每个子节点则包含了更小的矩形范围。
根据这种方式,R树可以有效地组织大规模空间对象数据。
2. QuadtreeQuadtree是一种基于四叉树的空间索引结构。
它将一个二维空间划分为四个象限,每个象限又按照同样的方式划分为四个象限,以此类推。
Quadtree的每个节点都代表一个区域,而每个子节点则代表更小的区域。
Quadtree通常用于处理离散点数据,例如地图上的地理位置坐标。
3. KD treeKD tree是一种基于分割维度的空间索引结构,它可以有效地处理高维数据。
在KD tree中,每个节点代表一个超矩形区域,而每个子节点则代表该区域内的子集。
KD tree 的基本思路是根据数据特征进行递归划分,以便将数据按照一定的规律组织在一起。
BSP tree是一种基于二分法的空间索引结构,它主要用于分割多边形数据。
在BSP tree中,每个节点代表一个平面构成的空间体积,而每个子节点则代表该空间体积内的多边形集合。
BSP tree通常用于图形渲染和游戏开发等领域。
以上介绍的空间索引结构都是针对不同数据类型和应用场景的需求而设计的。
当我们需要选择一个具体的空间索引结构时,需要考虑以下几个因素:1. 数据类型:不同类型的数据需要不同的数据结构进行管理。
数据库中的空间索引算法随着数据的不断增长和应用的不断丰富,数据库领域中的空间数据处理越来越受到关注。
数据库中存储的数据除了数字等简单类型数据之外,还存在着很多和空间有关的数据,比如地理位置信息、医学影像等。
这些数据的处理和查询需要使用到更加复杂的算法和数据结构,其中空间索引算法就是其中的一种。
一、空间索引算法概述空间索引算法是一种用于空间数据查询的技术,用于提高查询效率和查询精度。
基本上,空间索引算法的核心思路是将二维或三维空间数据映射到一维的数轴上,以此来进行数据的存储和查询。
具体来说,空间索引算法会构建一些数据结构,用来保存空间数据和其对应的位置信息。
这些数据结构可以是树型结构,也可以是网格结构等其他形式的结构。
在构建好数据结构之后,空间索引算法可以使用各种算法来实现对空间数据的查询,比如范围查询、最近邻查询等。
二、常见的空间索引算法1. R树R树是一种用于空间数据查询的常见数据结构,特别适用于范围查询和最近邻查询等场景。
R树的基本思路是将空间数据按照其位置信息分成多个区域,每个区域对应一颗子树,从而形成一棵树形结构。
查询时,R树会在树上不断递归查找符合查询条件的区域,直到找到所有符合条件的数据为止。
2. KD树KD树是一种用于高维数据查询的数据结构,适用于最近邻查询等场景。
KD树的基本思路是将高维数据按照其每个维度的值进行划分,以此形成一棵二叉树。
查询时,KD树会按照维度的顺序遍历二叉树,不断递归查找符合查询条件的数据节点,直到找到所有符合条件的数据为止。
3. R*树R*树是R树的改进版本,旨在解决R树在范围查询等场景下存在的一些不足。
R*树的基本思路是将相邻的区域进行合并,以此来减少树的层数和查询时的扫描次数。
与R树相比,R*树在处理范围查询等场景时更加高效。
4. Grid-FileGrid-File是一种网格索引算法,适用于范围查询等场景。
它的基本思路是将数据按照网格划分,以此来进行数据的存储和查询。