常用机构分析
- 格式:ppt
- 大小:2.53 MB
- 文档页数:134
常用机构设计范文机构设计是指构建一个组织体系,明确组织结构、职能分工、管理制度和工作流程等方面的内容。
常用机构设计包括部门化机构设计、矩阵式机构设计、网络式机构设计等。
下面将详细介绍常用的几种机构设计。
一、部门化机构设计部门化机构设计是将组织按照职能或者业务划分成不同的部门,每个部门负责特定的职能或者业务。
这种机构设计的优点是职能明确,责任明确,便于管理和监督。
常见的部门化机构设计有:1.功能型机构设计功能型机构设计是按照业务功能划分组织部门,每个部门负责特定的功能,如生产部门、财务部门、营销部门等。
这种机构设计适用于业务单一、功能独立的组织,能够确保工作的专业性和效率。
2.地域型机构设计地域型机构设计是按照地理位置划分组织部门,每个部门负责特定的地区。
这种机构设计适用于业务范围广泛,分布在不同地区的组织,便于管理和协调各地区的工作。
3.项目型机构设计项目型机构设计是按照项目划分组织部门,每个部门负责特定的项目。
这种机构设计适用于需要频繁启动和关闭项目的组织,能够提高项目管理的效率和灵活性。
二、矩阵式机构设计矩阵式机构设计是将组织按照职能和项目两个维度划分,形成一个矩阵状的组织结构。
这种机构设计的优点是相对灵活,能够兼顾职能和项目的需求,促进信息流动和跨部门合作。
常见的矩阵式机构设计有:1.弱型矩阵弱型矩阵是在功能型机构设计的基础上增加项目组织,部门仍然保持较大的权力和决策权。
这种机构设计适用于项目对职能部门的需求较小,项目组织主要起协调和支持作用。
2.强型矩阵强型矩阵是在功能型机构设计的基础上增加项目组织,项目组织在权力和决策权上与职能部门保持平衡。
这种机构设计适用于项目对职能部门的需求较大,项目组织有较大的自治权。
3.混合型矩阵混合型矩阵是在功能型机构设计的基础上增加项目组织,部门和项目组织在权力和决策权上保持一定的平衡。
这种机构设计适用于项目对职能部门的需求较大,而且职能部门之间存在相互依赖关系的组织。
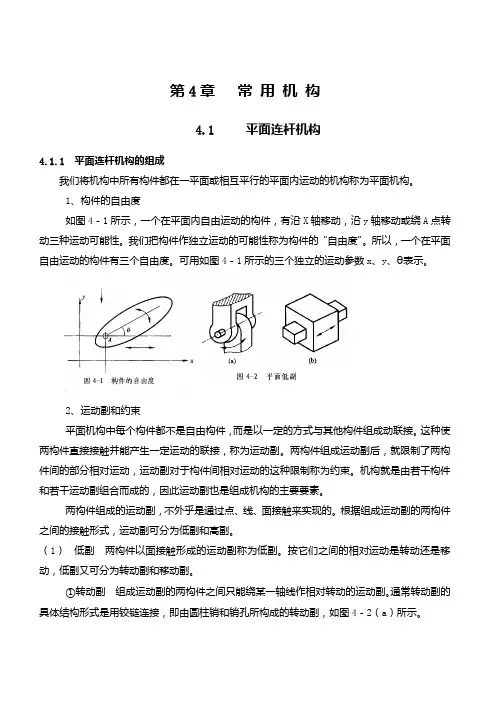
第4章常用机构4.1 平面连杆机构4.1.1 平面连杆机构的组成我们将机构中所有构件都在一平面或相互平行的平面内运动的机构称为平面机构。
1、构件的自由度如图4-1所示,一个在平面内自由运动的构件,有沿X轴移动,沿y轴移动或绕A点转动三种运动可能性。
我们把构件作独立运动的可能性称为构件的“自由度”。
所以,一个在平面自由运动的构件有三个自由度。
可用如图4-1所示的三个独立的运动参数x、y、θ表示。
2、运动副和约束平面机构中每个构件都不是自由构件,而是以一定的方式与其他构件组成动联接。
这种使两构件直接接触并能产生一定运动的联接,称为运动副。
两构件组成运动副后,就限制了两构件间的部分相对运动,运动副对于构件间相对运动的这种限制称为约束。
机构就是由若干构件和若干运动副组合而成的,因此运动副也是组成机构的主要要素。
两构件组成的运动副,不外乎是通过点、线、面接触来实现的。
根据组成运动副的两构件之间的接触形式,运动副可分为低副和高副。
(1)低副两构件以面接触形成的运动副称为低副。
按它们之间的相对运动是转动还是移动,低副又可分为转动副和移动副。
①转动副组成运动副的两构件之间只能绕某一轴线作相对转动的运动副。
通常转动副的具体结构形式是用铰链连接,即由圆柱销和销孔所构成的转动副,如图4-2(a)所示。
②移动副组成运动副的两构件只能作相对直线移动的运动副,如图4-2(b)所示。
由上述可知,平面机构中的低副引入了两个约束,仅保留了构件的一个自由度。
因转动副和移动副都是面接触,接触面压强低,称为低副。
我们将由若干构件用低副连接组成的机构称为平面连杆机构,也称低副机构。
由于低副是面接触,压强低,磨损量小,而且接触面是圆柱面和平面,制造简便,且易获得较高的制造精度。
此外,这类机构容易实现转动、移动等基本的运动形式及转换,因而是在一般机械和仪器中应用广泛。
平面连杆机构也有其缺点:低副中的间隙不易消除,引起运动误差,且不易精确地实现复杂的运动规律。
常用机构的类型工作原理
机构是人类在生产和生活中创造的一种物理工具,它通过结构、运动和力的转换实现各种工作。
常用机构的类型和工作原理包括以下几种:
1.齿轮机构:由齿轮和齿轮组成,通过啮合传递转矩和动力。
2.链传动机构:通过链条连接的轴和齿轮传递动力,常见于自行车和摩托车等车辆中。
3.凸轮机构:通过凸轮和连杆实现线性或旋转运动,常见于汽车发动机中的气门机构。
4.摆线机构:通过与摆线齿轮啮合的摆线齿轮实现线性或旋转运动。
5.蜗杆机构:由蜗杆和蜗轮组成,通过螺旋传递转矩和动力,常见于电动工具和机床中。
6.滚柱机构:由滚柱和导轨组成,通过滚动运动实现线性运动,常见于工业机械和自动化设备中。
以上是常用机构的类型和工作原理,不同类型的机构在不同的应用中具有不同的优点和缺点,因此需要根据具体的需求进行选择和设计。
- 1 -。



简述常用的传动机构
传动机构是指将动力通过机械连接传递到需要运动的部件中的机构,是机械系统中的重要组成部分。
常见的传动机构包括齿轮传动、链传动、带传动、轴传动等。
1. 齿轮传动
齿轮传动是一种常用的传动机构,将动力通过齿轮的咬合传递到需要运动的部件。
齿轮传动的优点是传递功率大、平稳、精度高,缺点是制造成本高、维护麻烦。
2. 链传动
链传动是一种将动力通过链状部件传递的传动机构,适用于需要一定速度范围内的运动,具有传递功率大、结构简单、维护方便等优点。
3. 带传动
带传动是将动力通过带状部件传递的传动机构,适用于高速、高精度、低噪音、易于维护等特点,是许多工业设备中常用的传动方式之一。
4. 轴传动
轴传动是将动力通过轴传递的传动机构,适用于需要一定速度范围内的运动,但传递功率不如其他传动方式大。
轴传动的优点是制造成本低、结构简单、维护方便,缺点是精度较低。
除了上述常见的传动机构,还有一些其他类型的传动机构,例如弹性传动、气动传动等。
不同的传动机构适用于不同的场合,选择合适的传动机构对于机械系统的正常运行至关重要。
常用机构的转动惯量与扭矩的计算引言:在机械工程中,常常需要计算机构的转动惯量和扭矩,这些参数是设计和分析机械系统的重要指标。
本文将介绍一些常用机构的转动惯量和扭矩的计算方法,以帮助读者更好地理解机械系统的运动行为。
一、刚性转动连杆机构刚性转动连杆机构是一种常见的机构,在此之前,我们需要对转动惯量和扭矩有所认识。
1.转动惯量的计算转动惯量是描述物体绕一些轴线转动的惯性大小。
对于刚性连杆机构而言,其转动惯量可以通过以下公式计算:I=m*r^2其中,I表示转动惯量,m表示物体的质量,r表示质点与轴线距离。
扭矩是描述物体受力作用下产生的转动效果的物理量。
对于刚性连杆机构而言,其扭矩可以通过以下公式计算:T=r*F其中,T表示扭矩,r表示力矩臂,F表示力的大小。
二、常见机构的转动惯量和扭矩计算1.单摆机构单摆机构由一个固定轴和一个摆动物体组成,其转动惯量和扭矩的计算公式如下:I=m*L^2T = m * g * L * sinθ其中,I表示摆动物体的转动惯量,m表示摆动物体的质量,L表示摆长,g表示重力加速度,θ表示摆动物体相对垂直方向的偏角。
2.齿轮传动机构齿轮传动机构由驱动轮和从动轮组成,其转动惯量和扭矩的计算公式如下:I=m*r^2T=F*r其中,I表示轮的转动惯量,m表示轮的质量,r表示轮的半径,F表示作用在轮上的力。
3.曲柄摇杆机构曲柄摇杆机构由曲柄和摇杆组成,其转动惯量和扭矩的计算公式如下:I=m*r^2T=F*r其中,I表示摇杆的转动惯量,m表示摇杆的质量,r表示摇杆的长度,F表示作用在摇杆上的力。
4.平行四边形机构平行四边形机构由两个平行的连杆和两个交叉连杆组成,其转动惯量和扭矩的计算公式如下:I = m * a^2 * (sinδ)^2 + 1/12 * m * b^2T = F * a * sinδ其中,I表示交叉连杆的转动惯量,m表示交叉连杆的质量,a表示平行连杆的长度,δ表示平行连杆与交叉连杆之间的夹角,b表示交叉连杆的长度,F表示作用在交叉连杆上的力。
产品结构常用机构一、螺纹连接螺纹连接是一种常见的产品结构机构,它通过螺纹的嵌合来实现零部件的连接。
螺纹连接具有结构简单、拆装方便、可靠性高等优点,广泛应用于各种机械设备中。
二、键连接键连接是一种通过键的嵌入来实现零部件连接的结构机构。
键连接常用于轴与轮、轴与轴套之间的连接,具有传递力矩大、结构紧凑等优点。
三、销连接销连接是一种通过销的嵌入来实现零部件连接的结构机构。
销连接常用于轴与孔之间的连接,具有结构简单、装拆方便等特点。
四、齿轮传动齿轮传动是一种通过齿轮的啮合来实现转动传递的结构机构。
齿轮传动具有传递力矩大、传动效率高等优点,广泛应用于各种机械设备中。
五、链传动链传动是一种通过链条的传动来实现转动传递的结构机构。
链传动具有传递力矩大、传动平稳等优点,广泛应用于各种机械设备中。
六、皮带传动皮带传动是一种通过皮带的传动来实现转动传递的结构机构。
皮带传动具有传递力矩大、传动平稳、噪音小等优点,广泛应用于各种机械设备中。
七、滑动轴承滑动轴承是一种通过滑动摩擦来实现零部件支撑和转动的结构机构。
滑动轴承具有结构简单、摩擦损失小等优点,广泛应用于各种机械设备中。
八、滚动轴承滚动轴承是一种通过滚动摩擦来实现零部件支撑和转动的结构机构。
滚动轴承具有承载能力大、摩擦损失小等优点,广泛应用于各种机械设备中。
以上是一些常见的产品结构机构,它们在实际应用中发挥着重要的作用。
了解这些机构的特点和应用领域,对于产品设计和制造过程具有重要的指导意义。
在实际应用中,我们可以根据需要选择合适的结构机构,以实现产品的功能要求和性能目标。
希望本文对大家了解产品结构机构有所帮助。