机械系统设计2
- 格式:doc
- 大小:428.00 KB
- 文档页数:12


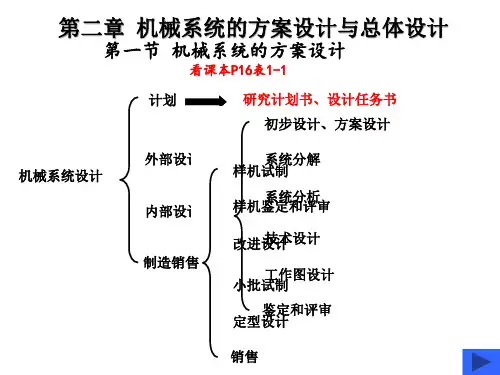



第三章机械系统的载荷特性和动力机选择第一节工作机械的载荷和工作制第二节动力机的类型、机械特性及其选用第一节工作机械的载荷和工作制任何机械系统都要承受各种外力的作用,这些外力称为载荷。
载荷不仅是计算强度和刚度的重要依据,而且也是进行动力计算和选用动力系统的主要依据之一。
载荷通常用力、力矩、压力、功率等参量表示。
一、载荷类型二、载荷的处理方法三、载荷的确定方法四、工作机械的工作制一、载荷类型按载荷作用的形式分:拉伸或压缩载荷、弯曲载荷和扭转载荷,常用力、力矩或扭矩的形式来表示,也可以用压力、功率、加速度等形式来表示。
按照载荷产生的来源分:z工作载荷——由工作阻力产生z动力载荷——由运动变化产生z自重载荷——自重量产生z温度载荷——温度变化产生z风力载荷——空气阻力产生z液力载荷——液体压力产生一、载荷类型按载荷与时间关系分:z静载荷:大小、方向和位置都不变的载荷;z动载荷:大小、方向和位置随时间而变化的载荷。
载荷历程:工程上常把载荷值随时间变化的规律称为载荷—时间历程周期性载荷非周期性载荷正弦变化载荷复杂周期性载荷准周期性载荷瞬变载荷确定性载荷随机载荷动载荷载荷—时间历程图)sin()(0ϕω+=t x t x F t复杂周期性载荷正弦规律变化载荷(一)周期性载荷:大小随时间作周期性变化的载荷(二)非周期性载荷准周期性载荷:指由若干频率比是有理数的简谐载荷的合成,它可用周期载荷的处理方法来表示。
瞬变载荷:指作用时间短、幅值变化较大的载荷。
瞬变载荷常采用傅里叶变换建立载荷的时间函数和频率函数之间的一一对应关系。
冲击载荷是一种比较典型的瞬变载荷。
(三)随机载荷随机载荷是一种无规则的、不能重复的载荷,对它只能进行统计描述。
随机载荷通常由现场实测(即采样)获得,每一次采样可以得到一个样本函数(也称子样)x(t)。
在相同的条件下,进行重复采样,就可以得到互不相同的许多样本函数x1(t),x2(t),…,xn(t),n个样本函数的集合形成了随即过程。
机械系统设计三、下列知识点可出计算类型题20.计算图示机构自由度并判定机构是否具有确定的运动(若含有复合铰链、局部自由度和虚约束请指出)。
(1)答:B 处为局部自由度;E 、D 之一为虚约束。
机构自由度:F=3n -2P L -P H =3×4-2×5-1=1因为机构主动件数和自由度数相等,所以机构有确定的运动。
21.计算图示机构自由度并判定机构是否具有确定的运动(若含有复合铰链、局部自由度和虚约束请指出)。
答: A 处为局部自由度;移动副G 、H 之一为虚约束; 机构自由度:F=3n -2P L -P H =3×6-2×8-1=1因为机构主动件数和自由度数相等,所以机构有确定的运动。
22.计算图示机构自由度并判定机构是否具有确定的运动(若含有复合铰链、局部自由度和虚约束请指出)。
答: F 处为局部自由度;移动副D 、E 之一为虚约束; 机构自由度:F=3n -2P L -P H =3×6-2×8-1=1因为机构主动件数和自由度数相等,所以机构有确定的运动。
23.计算图示机构自由度并判定该机构是否具有确定的运动(若含有复合铰链、局部自由度和虚约束请指出)。
答: G 处为局部自由度;移动副E 、F 之一为虚约束; 机构自由度:F=3n -2P L -P H =3×4-2×5-1=1因为机构主动件数和自由度数相等,所以机构有确定的运动。
24.计算图示机构的自由度并判断图示机构是否具有确定的运动(若含有复合铰链、局部自由度和虚约束请指出),其中CD ∥EF ∥GH ,CD =EF =GH ;CG ∥DH ,CE =DF ,EG =FH 。
答: C 处为复合铰链,EF 杆及相联接的转动副或GH 杆及相联接的转动副之一为虚约束。
机构自由度:F=3n -2P L -P H =3×5-2×7-0=1因为机构主动件数和自由度数相等,所以机构有确定的运动。
25.(1-3P14)计算图示机构自由度并判定机构是否具有确定的运动(若含有复合铰链、局部自由度和虚约束请指出)。
题24图B题20图题21图题22图题25图答:C处为复合铰链。
机构自由度:F=3n-2P L-P H=3×5-2×7=1因为机构主动件数和自由度数相等,所以机构有确定的运动。
26.(1-3P14)计算图示机构自由度并判定机构是否具有确定的运动(若含有复合铰链、局部自由度和虚约束请指出)。
题26图答:B、F处为复合铰链。
机构自由度:F=3n-2P L-P H=3×7-2×10=1因为机构主动件数和自由度数相等,所以机构有确定的运动。
27.(1-3P14)计算图示机构自由度并判定该机构是否具有确定的运动(若含有复合铰链、局部自由度和虚约束请指出)。
题27图答:机构自由度:F=3n-2P L-P H=3×5-2×7=1因为机构主动件数和自由度数相等,所以机构有确定的运动。
28.(1-3P14)计算图示机构的自由度并判断图示机构是否具有确定的运动(若含有复合铰链、局部自由度和虚约束请指出)。
题28图答:移动副F、G之一为虚约束。
机构自由度:F=3n-2P L-P H=3×5-2×7-0=1因为机构主动件数和自由度数相等,所以机构有确定的运动。
四、下列知识点可出综合应用题28.阐述平面机构运动简图的绘制方法答:(1)分析机械的动作原理、组成情况和运动情况,搞清固定构件与活动构件、主动件与从动件。
(2)沿着运动传递路线,逐一分析每两个构件间相对运动的性质,以确定运动副的类型和数目。
(3)恰当地选择运动简图的视图平面,对于平面机构通常选用与各构件运动平面相平行的平面作为视图平面。
必要时也允许把机械不同部分的视图展开到同一图面上,或用其他视图表达,总之以能简单清楚地把机械的结构及运动传递的情况正确地表达为原则。
(4)选择适当的比例尺(5)从原动件开始,根据确定出的各运动副的相对位置,用各运动副的代号、常用机构运动简图符号和简单线条,按传动顺序绘制出机构运动简图。
29.阐述机构结构分析的方法和步骤答:机构的结构分析就是将机构分解为原动件、机架和基本杆组,并确定机构的极别。
与机构组成过程相反,一般是从远离原动件的构件开始拆组。
其要领及步骤如下:(1)检查并除去机构中的局部自由度和虚约束。
(2)用低副代替机构中的高副。
(3)正确计算机构的自由度,明确机构的原动件。
机构原动件的数目应等于机构自由度的数目。
(4)从机构中拆杆组。
首先从传动关系上离原动件最远的部分开始试拆,先试拆Ⅱ级杆组,如不能拆卸,再试拆Ⅲ级杆组或更高级杆组,直到剩下原动件和机架为止。
注意每次试拆组后,机构剩余部分的运动特性与拆杆组前相同,不允许出现只属于一个构件的运动副和只有一个运动副的构件(原动件除外)。
四、下列知识点可出综合应用类型题32.已知连杆BC 的长度及其预定位置B 1C 1、B 2C 2、B 3C 3,设计出四杆机构如图。
叙述图解过程。
答:连杆BC 的轨迹分别是以固定铰链A 、D 为圆心的圆弧或圆。
根据“三点定一圆”的几何原理,分别作B 1B 2、B 2B 3的垂直平分线b 12、b 23,它们的交点即为固定铰链A 的中心位置;同理,分别作线段C 1C 2、C 2C 3的垂直平分线c 12、c 23,它们的交点即为固定铰链D 的中心位置。
连接AB 1和C 1D 即为所求的四杆机构。
此问题有唯一解。
上述问题中,如果给定连杆的两个预定位置B 1C 1、B 2C 2,那么固定铰链A 、D 点就可以分别在b 12、c 12上任意取,这时所求的四杆机构有无穷多组解。
具体设计时,一般再根据其他条件,来得到一组确定解。
33.设计一铰链四杆机构,使其两连架杆实现下列三组对应关系:θ11=30°,θ31=45°;θ12=60°,θ32=90°;θ13=90°、θ33=135°。
(可取1件长a =300mm )解:根据机构的位置方程)]()cos[()cos()cos(00313031021ϕαθθθϕθα-+-=+++-i i i i P P P 取0000==ϕα,,则由上式得)cos(cos cos )cos(cos cos )cos(cos cos 331333313213212323122131113131121θθθθθθθθθθθθ-=+--=+--=+-P P P P P P P P P 将三组参数代入上式则)13590cos(135cos 90cos )9060cos(90cos 60cos )4530cos(45cos 30cos 321321321︒-︒=︒+︒-︒-︒=︒+︒-︒-︒=︒+︒-P P P P P P P P P 解方程组求出三个待定参数 3657.19313.16728.1321===P P P图32题题33图由常数关系式 ⎪⎭⎪⎬⎫==-++=a d P c d P ac b d c a P //2/)(3222221根据实际需要决定构件1的长度a 后,其他构件的杆长b 、c 、d 便可确定。
取原动件1长度a =300mm ,将P 1、P 2、P 3及a 代入上式求出其余杆尺寸分别为b =299.9mmc =212.1mmd =409.7mm34.已知摇杆长CD ,摆角ψ,和行程速比系数K ,根据给出的图示结果,阐述用图解法设计曲柄摇杆机构的设计步骤。
答:1)计算出极位夹角11180+-︒=K K θ 任取一点D 作为摇杆转动中心,以此为顶点作等腰三角形△DC 1C 2,使∠C 1DC 2=ψ,两腰长CD D C D C ==21。
2)计算出极位夹角11180+-︒=K K θ,过C 1点作C 1N ⊥C 1C 2,过C 2作C 2M 使∠C 1C 2M=90°-θ,两直线交于P 点。
3)△作直角三角形△C 1C 2P 的外接圆,则此圆周上任意点均可作为曲柄转动中心A 。
A 确定后机架长AD 即可确定。
由几何关系得曲柄和连杆长度:a=(AC 2-AC 1)/2,b=(AC 2+AC 1)/2。
因A 点位置有无数个,所以有无穷多解。
常用最小传动角γmin 或其他附加条件确定A 点的确切位置。
三、下列知识点可出综合应用类型题21.理论廓线曲率半径为ρa ,实际廓线曲率半径为ρb ,滚子半径为r r ,分析滚子半径对凸轮实际轮廓的影响。
答:对于内凹凸轮廓线,其三者之间的关系为ρb =ρa +r r ,因此无论滚子半径大小如何,实际轮廓线总是可以作出的。
对于外凸凸轮廓线,其三者间的关系为ρb =ρa -r r ,ρa >r r 时,ρb >0,此时可以求出正常的实际轮廓;当ρa =r r 时,ρb =0,凸轮实际轮廓将出现尖点,尖点处极易磨损;ρa <r r 时,则ρb <0为负值,实际上轮廓将出现交叉,在加工时,交叉部分被切掉,使从动件不能按预期的运动规律运动,从而导致从动件运动失真。
因此,为了使滚子从动件凸轮机题34图构不发生失真,保证任何情况下都不发生实际轮廓变尖或相交,应使实际轮廓外凸部分的最小曲率半径不小于某一许用值 [ρb ],即ρbmin =ρamin -r r ≥[ρb ],其中[ρb ]=3~5mm 。
三、下列知识点可出计算类型题41.图示渐开线。
已知基圆半径r b =45mm ,求r k =60mm 时,渐开线K 点的压力角αk 、曲率半径ρk ;基圆压力角αb 和曲率半径ρb 各是多少。
答:由几何关系 ︒=∴===41407506045r r k k b k ..cos αα曲率半径 mm 6939r k b k .tan ==αρ 基圆压力角和曲率半径 00==b b ρα39.一渐开线斜齿圆柱齿轮,z=14,m n =4mm ,β=12°,求齿轮的当量齿数;判断齿轮是否发生根切。
答:当量齿数 z v =z/(cos 3β)=14/(cos 312°)=15.53不根切直齿轮的最少齿数为17,不根切斜齿轮的最少齿数为 z min =z vmin cos 3β=17 cos 315°=15.91 由于 z v <z min 所以发生根切。
40.一对外啮合渐开线斜齿圆柱齿轮,z 1=16,z 2=40,m n =4mm ,β=15°,b=30mm ,求无侧隙啮合的中心距、端面模数及轴面重合度βε。
答:答:中心距 a =m n (z 1+z 2)/(2cos β)=4×(16+40)/(2cos15°)=115.5mm 端面模数 m t =m n /cos β=4/cos15°=4.14mm轴面重合度 βε=(bsin β)/(πm n )=(30×sin15°)/ (π×4)=0.6241.已知一齿轮的模数m=3mm ,齿数z=20,压力角α=20°,h a *=1,求齿顶圆处的渐开线压力角和曲率半径。