机械系统设计——割草机
- 格式:pdf
- 大小:52.75 KB
- 文档页数:1
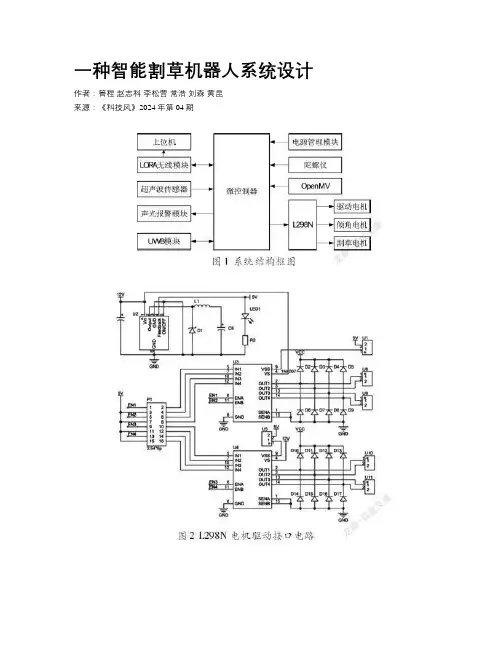
一种智能割草机器人系统设计作者:管程赵志科李松营常浩刘森黄昆来源:《科技风》2024年第04期摘要:该系统以微控制器为核心,采用OpenMV与超声波传感器相结合的方式实现导航与避障功能,通过陀螺仪实时检测地况平整度来调整刀具倾角,通过搭载的UWB模块与LORA模块实现路径规划与远程监控,并设计了整体机械结构及伸缩式刀具结构,为智能割草机器人提供了完整设计方案。
关键词:割草机器人;路径规划;远程监控中图分类号:TP242草坪在城市和景区绿化方面发挥着重要作用,然而随着草坪面积的不断增大,草坪的日常修剪成为一项繁重的工作。
为了减轻草坪修剪维护的成本,割草机器人应运而生[12]。
现有的割草机器人主要有轮式驱动和履带驱动两种方式。
履带式割草机人具有爬坡能力强,适应不同地况的优点,但自身重量偏重,对动力电池的要求较高。
轮式割草机器人具有驱动结构简单的优点,在现有的割草机器人中应用最为广泛。
割草路径规划是割草机器人智能化的重要特征。
现有的割草机器人主要借助超声波传感器、激光雷达、机器视觉、北斗导航等信息获取方式,并通过Dijkstra算法、A*算法、D*算法、人工势场法等路径规划算法实现最佳路径选择[34]。
近年来,随着人工智能和图像处理硬件性能的大幅提升,使得实时图像处理与控制决策成为可能,也使得YOLO等目标检测算法越来越多地应用于割草机器人的路径规划之中。
但是,这些割草机器人普遍存在智能化程度低,且仅能胜任平整草坪的修建工作,无法适应全天候、多种地况作业的修剪任务[5]。
特别是因缺乏智能路径选择算法,容易出现重复作业和遗漏未修剪的情况出现。
因此,迫切需要设计一种适应多种地况的新型智能割草机器人。
1系统总体设计本设计的智能割草机器人系统方案,如图1所示。
本设计的微控制选择STM32F407作为整个控制系统的核心,用于处理各个传感器获得的数据信息,并做出控制决策。
陀螺仪选用MPU6050,用于实时获取行进中机器人的位置姿态,根据运行姿态来调整割草刀具的倾斜角度。
智能化割草机控制系统设计与性能评估智能化割草机控制系统是一种利用先进的技术和算法,自动完成割草操作的设备。
本文将从设计和性能评估两个方面对智能化割草机控制系统进行探讨。
一、智能化割草机控制系统设计1. 系统架构设计智能化割草机控制系统的架构设计应包括感知模块、决策模块和执行模块。
感知模块负责采集割草机运行环境的相关信息,如障碍物、地形等。
决策模块基于感知模块的数据进行分析和决策,确定割草机的运动轨迹。
执行模块根据决策模块的指令,控制割草机进行相应的运动。
2. 感知模块设计感知模块主要包括传感器和数据采集装置。
传感器可以包括视觉传感器、超声波传感器等,用于获取割草机周围环境的信息。
数据采集装置负责将传感器采集到的数据进行处理和传输。
3. 决策模块设计决策模块是智能化割草机控制系统的核心部分,它通过算法和模型对感知模块获取的数据进行分析和决策。
常用的算法包括路径规划算法、障碍物识别算法等。
4. 执行模块设计执行模块负责将决策模块的指令转化为割草机的运动控制。
可采用电机控制、行驶控制等技术。
二、智能化割草机控制系统性能评估1. 功能性能评估功能性能评估主要包括割草机的割草效果、割草速度和割草范围等。
割草效果需要评估割草机的割草质量和均匀性。
割草速度需要评估割草机的工作效率和节省操作时间的能力。
割草范围需要评估割草机的工作覆盖面积和适应性。
2. 安全性能评估安全性能评估主要包括割草机对障碍物的识别和避障能力。
割草机需要具备辨识障碍物并采取相应措施避免碰撞的能力,确保使用时不会对人或物造成危害。
3. 稳定性能评估稳定性能评估主要包括割草机在不同地形和环境条件下的运行稳定性。
割草机需要能够在各种地形和环境条件下保持稳定的工作状态,确保割草效果和操作安全性。
4. 可靠性能评估可靠性能评估主要包括割草机的耐用性和故障率。
割草机需要能够长时间稳定工作而不发生故障,提高使用寿命和用户满意度。
总结:智能化割草机控制系统的设计和性能评估是提高割草机工作效率、安全性和可靠性的关键。
遥控割草机机械部分设计摘要:本文对国内外市场现存的割草机进行了介绍和比较,指出了现在割草机研制过程中需注意的关键技术,并结合以往的成功经验和遥控割草机控制系统的要求,进行了遥控机械本体设计。
首先,选择了结构容易实现的三轮车体机构。
其后,建立了自动割草机的运动学和动力学模型,并根据相关计算确定了所需驱动电动机的参数,并以此为基础进行了电机选型。
再后根据选择的电机情况为遥控割草机设计了驱动系统的减速箱。
最后,结合遥控割草机的任务特点,为其设计了割草的机构。
作为割草机的主体部分,割台及调高部分技术成熟,性能稳定。
本文在这方面采用传统设计理念,和遥控部分配合,做了适当的调整。
关键词:遥控;割草机;差速驱动;人机工程学Design of Remote Control Lawn Mower about Mechanic OpponetAbstract: T his article introduces and compares to existing lawn mower , the key technologies and the successful experience for remote control lawn mower development be pointed out, scheme out the mechanical framework of remote control lawn mower. First, chose a simple tricycle structure. Second, establish the kinematics and dynamics model of autonomous robot lawn mower,confirm the driving motor parameters by corresponding calculation, and use those parameters as the basis select the driving motors.[1]Third, based on the selected driving motors, design a gear box for the remote control lawn mower.Finally, design a special adjustable cutting mechanism for the robot according to its lawn trimming task.The construction technique of mowing platform and turning up, which are the main part of my lawn mower, is mature degree and reliable performance. In this respect, my text applies a conventional technology and makes some appropriate readjustments to adapt to remote control.[2]At the end of the text, I finish ergonomics design of hand holding bracket and the adaptive design of chassis.Keywords: remote control; lawn mower; differential driving; man-machine engineering目录摘要 (1)关键词 (1)1 前言 (1)1.1 课题研究的目的及意义 (1)1.2 课题研究的范围和技术要求 (1)1.3 课题解决的主要问题 (2)2 系统主要结构及总体设计 (2)2.1 系统功能描述 (2)2.2 割草机工作原理 (2)2.3 功能解析 (3)2.4 遥控割草机整体方案设计 (4)2.4.1 遥控割草机驱动方案的选择 (6)2.4.2 割台方案的选择 (4)2.4.3 调高方案的选择 (5)3 遥控割草机的机械本体设计 (6)3.1 车体驱动电机的选择 (6)3.2 遥控割草机车体减速箱的设计 (9)3.2.1 各主要部件的选择 (9)3.2.2 分配传动比 (9)3.2.3 传动系统的运动和动力参数的设定 (9)3.2.4 设计齿轮 (10)3.2.5 输入轴及其轴承装置、键的设计 (14)3.2.6 输出轴及其轴承装置、键的设计 (19)3.2.7润滑与密封 (22)3.2.8 箱体结构尺寸 (23)3.2.9割台设计 (24)3.3.0 刀片有关参数的确定及驱动机参数的确定 (24)3.3.1 割刀的运动分析 (24)3.3.2 割刀的转速确定 (25)3.3.3 刀片数的确定 (27)3.3.4 割刀的技术数据 (27)3.3.5 割草机割草部分驱动机的选择 (28)3.4 遥控割草机体设计 (29)3.5 草坪修剪高度调节机构的设计 (30)3. 5. 1 修剪高度调节范围的确定 (32)3.5. 2 高度调节机构原理 (32)3.5. 3 调高机构的计算 (321)3.6 扶手的人机工程学设计 (32)4结论 (35)参考文献 (35)致谢 (36)1 前言1.1 课题研究的目的及意义伴随着各国城市城区的绿化程度的提高,许多的高尔夫球场,足球草坪场,街道草坪等公共绿地都需要进行维护。
采用惯性导航技术的割草机自动导航系统设计一、引言割草机在现代农业生产中有着广泛应用,可以自动完成割草任务,提高工作效率。
而惯性导航技术是一种基于加速度计和陀螺仪等传感器测量割草机姿态和位置变化的技术,可以实现高精度的自主导航。
本文旨在设计一种采用惯性导航技术的割草机自动导航系统,以提升其导航精度和效率。
二、惯性导航技术的原理1. 加速度计:加速度计可以测量割草机在空间中的加速度变化,通过积分可以得到速度和位置信息。
2. 陀螺仪:陀螺仪可以测量割草机的姿态变化,包括旋转角速度和姿态角度等。
三、采用惯性导航技术的割草机自动导航系统设计1. 传感器选择:选择高精度的加速度计和陀螺仪,以保证导航系统的准确性。
2. 信号处理与融合:对加速度计和陀螺仪的原始信号进行处理和融合,得到割草机的姿态和位置信息。
3. 运动状态检测:基于加速度计和陀螺仪的数据,设计算法检测割草机的运动状态,如行驶、转弯、停止等。
4. 自动路径规划:根据割草区域的形状和大小,设计路径规划算法,将割草机的运动轨迹优化,以提高割草效果和减少能耗。
5. 避障与安全:设计割草机的避障系统,当遇到障碍物时,割草机能够自动停止或绕行,确保割草安全。
6. 地图创建与更新:导航系统可以生成割草区域的地图,定期更新地图信息,为割草机提供更准确的导航引导。
7. 用户界面设计:设计用户界面,使用户可以设定割草区域、设定路径规划参数、监控割草机状态等。
四、系统优化与改进途径1. 引入其他传感器:如GPS、激光雷达等,与惯性导航技术相结合,提高导航精度和稳定性。
2. 智能学习与自适应:通过学习割草机在不同环境下的导航行为,优化算法,提升系统的自适应性和智能化水平。
3. 通信与联网功能:割草机导航系统可以与其他设备和系统进行通信和联网,实现远程监控和控制,提高系统的灵活性和便利性。
4. 能耗优化:优化导航算法和路径规划算法,减少割草机的能耗,延长电池寿命。
5. 集成机器学习和人工智能:采用机器学习和人工智能技术,让割草机具备自主学习和决策的能力,提高系统的智能性和效率。
割草机电动驱动系统优化设计与分析一、引言割草机作为一种常见的农业工具,广泛应用于家庭庭院、公园、高尔夫球场等场所。
传统的割草机主要采用燃油引擎作为驱动力源,但燃油引擎存在噪音大、排放污染等问题。
为解决这些问题,本文旨在优化设计割草机的电动驱动系统,提高其性能和环境友好性。
二、电动驱动系统的构成与工作原理1. 电动驱动系统的构成:- 电动马达:作为割草机的动力源,提供转动力矩。
- 电池组:提供电能供应,为电动马达提供动力。
- 控制器:负责控制电动马达的启停、转速调节等功能。
2. 电动驱动系统的工作原理:电池组为电动马达提供电能,电池组通过控制器与电动马达相连。
当控制器接收到启动信号后,它将驱动电动马达开始运转。
电动马达通过传动装置与割草刀片相连,实现割草机的割草功能。
三、优化设计与分析内容1. 电动马达的选择:- 功率和转速匹配:根据割草机的负载需求,选择合适功率和转速的电动马达。
功率过大会浪费电能,而功率过小会导致割草效果不佳。
- 高效率和低噪音:选择功率转换效率高、噪音低的电动马达,以提高割草机的整体性能和使用体验。
2. 电池组的优化:- 储能容量选择:根据割草机的使用时间长短和割草面积大小,选择适当的储能容量。
容量过小会导致电池快速电量耗尽,而容量过大则增加了割草机的重量。
- 快速充电技术:采用快速充电技术,可以缩短电池充电时间,提高使用效率和便捷性。
- 高能量密度电池:选择高能量密度的电池类型,提高电池组的能量储存密度,延长割草机的使用时间。
3. 控制器的优化:- 智能控制功能:加入智能控制功能,通过传感器实时监测电动马达的负载、温度等信息,根据实际需求动态调整驱动力。
- 多档可调速:设计多档可调速系统,根据不同割草需求调整驱动力的大小,提高割草效果。
- 电池管理系统:结合电动马达的负载情况,实现对电池组的智能管理,包括电池充放电保护、温度监控、寿命预测等,提高电池的使用寿命和安全性能。
四、优化设计与分析方法1. 研究现有电动驱动系统的性能和问题,分析其优化空间;2. 借鉴先进的电动驱动技术和理念,如无刷电机、功率电子技术等;3. 进行模拟和仿真实验,测试不同电动马达、电池组和控制器的组合效果;4. 使用优化算法对电动驱动系统参数进行优化,如遗传算法、粒子群算法等;5. 设计并制造新的电动驱动系统样机,进行实地试验验证。

高效能割草机的结构设计与性能改进一、引言高效能割草机是一种用于割除草坪上过长杂草的机械设备。
随着人们对于美观整洁环境的要求不断提高,高效能割草机的需求也逐渐增加。
本文将着重讨论高效能割草机的结构设计与性能改进,以提高割草机的工作效率和使用寿命。
二、割草机的结构设计1. 动力系统高效能割草机的动力系统需要满足割草作业的需求。
常见的动力系统包括内燃机、电动机和电池动力。
对于大面积的割草作业,内燃机的功率较高且连续工作时间较长,是一个理想的选择。
电动机适用于小型割草机,具有无噪音、零尾气排放的优点。
电池动力则是一种新兴的选择,既环保又方便携带。
2. 刀具系统割草机的刀具系统是关键的设计部分,直接影响割草机的割草效率。
为提高效率,刀具应具有一定的宽度和强度,能够快速割断草坪上的杂草。
同时,刀具的材质和结构也需要进行优化,以提高刀具的耐用性和抗磨损性能。
3. 手柄系统高效能割草机的手柄系统设计应考虑用户的舒适性和操控性。
手柄的高度和角度应可调节,以适应不同用户的需求。
同时,手柄的材质应具有良好的防滑性能,以提高操作时的稳定性和安全性。
4. 底盘系统割草机的底盘系统需要具备良好的承载能力和稳定性。
底盘材质宜选择轻量化的同时又具备足够的强度,以减轻用户的劳动强度并延长机器的使用寿命。
底盘底部可设计成弯曲形状,以提高草坪表面与刀具的贴合度,进一步提高割草效果。
三、高效能割草机的性能改进1. 引入智能控制技术通过引入智能控制技术,可实现割草机的自动化和智能化。
比如,可以利用视觉传感器识别草坪上的杂草,通过图像处理算法精确定位并自动执行割草任务。
这样不仅提高了割草机的工作精度和效率,也减轻了用户的操作负担。
2. 优化刀具结构针对刀具的优化,可以通过使用优质材料制作刀片,提高刀具的硬度和耐磨性,延长使用寿命。
同时,可以设计可更换刀片,方便用户进行维护和更换,降低维护成本。
3. 引入自动清理装置割草作业过程中,草坪杂草可能会堆积在割草机的底部,影响刀具的正常运转。
割草机驱动系统的设计与性能分析1. 引言割草机作为一种常见的园艺工具,广泛应用于园林、农田等场所。
割草机的驱动系统是其核心组成部分,直接影响着割草机的性能和工作效率。
本文旨在对割草机驱动系统进行设计与性能分析,以提升割草机的性能和效率。
2. 驱动系统的设计2.1 驱动类型选择割草机驱动系统通常采用内燃机或电动机作为动力源。
根据具体需求和使用场景,合理选择驱动类型。
内燃机具有功率大、作业时间长等特点,适用于大面积草坪的修剪;电动机则具有环保、噪音低等特点,适用于小面积草坪的修剪。
2.2 动力传递设计驱动系统需要将动力从驱动源传递至割草刀片,同时保证传递效率和稳定性。
根据驱动类型的不同,采取不同的传递方式,如通过齿轮传动、链条传动或皮带传动等。
在设计过程中需考虑传递效率、传递损耗和传递稳定性等因素。
2.3 转速匹配与控制割草机的割草刀片需要具有一定的转速,以确保割草效果。
因此,在驱动系统的设计中,需进行转速匹配与控制。
通过合理选择传动比例或添加可控制的变速器等方式,实现割草刀片转速的控制。
3. 性能分析3.1 效率分析割草机的效率是衡量其性能的重要指标。
通过对驱动系统进行性能测试和数据分析,可以得出割草机的总功率、实际割草功率以及能源利用效率等数据。
通过对比不同驱动类型和不同设计参数的割草机,评估其效率,以提升割草机性能。
3.2 能耗分析割草机在工作时需要消耗能源,因此能耗也是一个重要的性能指标。
通过对驱动系统和割草机整体的能耗进行分析,可以评估不同驱动系统和不同设计参数对能耗的影响。
在此基础上,进行能耗优化,提高割草机的能源利用效率。
3.3 声音与振动分析割草机在工作时会产生一定的噪音和振动,对使用者和环境都会造成一定的影响。
通过对驱动系统和割草机的噪音与振动进行分析,可以评估不同驱动系统和设计参数对噪音与振动的影响程度。
在此基础上,进行噪音和振动控制的优化,提升割草机的舒适性和环保性能。
4. 结论割草机驱动系统的设计与性能分析对于提升割草机的性能和效率具有重要作用。
割草机底盘设计与悬挂系统优化分析一、引言割草机底盘设计与悬挂系统优化分析是对割草机底盘结构和悬挂系统进行分析和优化的过程。
本文将从设计要求、底盘结构分析、悬挂系统设计和优化等方面进行探讨。
二、设计要求1. 底盘结构稳定性:底盘结构应能承受割草机在不同工况下的荷载,并保证稳定性和安全性;2. 悬挂系统舒适性:悬挂系统应减缓割草机在不平地面上的震动和冲击,提供舒适的操作环境;3. 防护性能:底盘结构应具备一定的防护性能,能够抵御碎石和其它外部物体的侵入,保护机器正常运行;4. 结构刚度:应确保底盘结构具有足够的刚度,以满足割草机在割草作业中的稳定性需求。
三、底盘结构分析1. 结构类型:考虑到底盘的结构稳定性和可靠性,建议采用框架式结构,具备良好的承载能力和刚性;2. 材料选择:底盘结构材料应选用高强度、耐腐蚀和耐磨损的材料,如碳钢或铝合金等;3. 结构设计:底盘结构设计应考虑到割草机的作业需要和力学原理,合理布局割草刀和底盘骨架的位置,以尽可能减少横向和纵向的扭曲变形。
四、悬挂系统设计与优化1. 悬挂类型选择:基于舒适性和稳定性的综合考虑,建议采用多点悬挂系统,通过多个弹簧和减震器组成的悬挂系统来减缓震动和冲击;2. 弹簧与减震器的选用:悬挂系统中应选择合适的弹簧和减震器,以达到减震的效果。
同时,应考虑到弹簧和减震器的刚度和阻尼特性,以满足割草机的各项工作要求;3. 悬挂点布置:悬挂点的布置应合理,以达到均匀分布载荷和提高底盘的稳定性。
可通过动态分析和试验来优化悬挂点的位置和数量;4. 调节性能:悬挂系统应具备一定的调节性能,以适应不同工况下的负荷和路面条件。
可通过调节弹簧和减震器的刚度和预紧力来实现;5. 悬挂系统与底盘结构的协调性优化:悬挂系统应与底盘结构相匹配,确保两者协调工作,提高整体性能和可靠性。
五、结论通过底盘结构设计和悬挂系统优化分析,可以提高割草机的稳定性、舒适性和防护性能。
建议采用框架式结构,选用高强度材料,并合理布置割草刀和底盘骨架的位置。
小型电动割草机的设计目录摘要 (1)关键词 (1)1前言 (2)1.1 研究的目的和意义 (2)1.2国内外发展现状 (2)1.2.1国外牧草收割机的生产研究概况 (2)1.2.2国内牧草收割机的生产研究概况 (3)1.2.3国内外牧草收割机械切割部件发展概况 (4)2 整体方案的确定 (6)2.1 收割机类型的选择 (6)2.1.1 按切割装置分类 (6)2.1.2 往复式割草机分类 (6)2.2 方案确定 (7)2.3 本章小结 (8)3 切割系统的设计 (9)3.1切割器主要参数分析 (9)3.1.1 往复式切割器影响切割质量的因素分析 (9)3.1.2 技术参数的分析和评价 (10)3.2 凸轮轴的设计 (10)3.2.1 凸轮轴的设计 (10)3.2.2 确定凸轮轴各段的直径和长度 (11)3.3 切割装置的设计 (11)3.3.1 动刀的结构 (11)3.3.2 刀片间隙的调整 (12)3.3.3 偏心轮的设计 (13)3.3.4 切割装置附件的设计 (13)3.4 本章小结 (14)4传动系统的设计 (15)4.1 传动系统的结构设计和传动比确定 (15)4.1.1 传动系统结构设计 (15)4.1.2 传动比确定 (15)4.2 收割机功率需求分析和传动效率 (16)4.2.1 收割机的功率分析 (16)4.2.2 收割机的传动效率 (17)4.3 减速器的设计 (28)4.3.1 锥齿轮的设计 (28)4.3.2 减速箱输入轴的设计和校核 (22)4.3.3 曲柄主轴的设计和校核 (26)4.3.4 箱体及附件的设计 (30)4.4 本章小结 (33)5 输送系统的设计 (34)5.1 输送带速度计算 (34)5.2 输送系统参数确定 (35)5.2.1 输送系统中带传动的设计 (35)5.2.2 拨齿高度和间距 (37)5.2.3 输送带高度 (37)5.2.4 割台前伸量 (37)5.3 链传动的设计 (37)5.4 输送主轴的设计和校核 (39)5.4.1 输送主轴的设计 (39)5.4.2 确定输送主轴各段的直径和长度 (40)5.4.3 轴的受力分析 (40)5.4.4 输送主轴的强度校核 (41)5.5 本章小结 (41)结论 (42)参考文献 (43)致谢 (45)小型电动割草机的设计摘要:随着农村现代化进程的加快,农业产业结构正朝着多元化的方向发展。
割草机系统的工作原理与设计优化割草机是一种被广泛应用于农业、园艺和城市绿化领域的机械设备,主要用于割除草坪、田地和花园中的杂草。
它通过刀片的旋转将草坪上的杂草割断,使其保持整洁美观。
本文将介绍割草机系统的工作原理,并提出设计优化的方法。
一、割草机系统的工作原理割草机系统由动力系统、传动系统和刀具系统组成。
其工作原理可以简述如下:1. 动力系统割草机可以采用多种动力系统,如内燃机、电动机或人力驱动。
动力系统为割草机提供所需的动力,使其能够工作。
2. 传动系统传动系统将动力传递到刀具系统。
通常,传动系统包括离合器、齿轮或皮带传动装置。
离合器用于启动和停止刀具的旋转,齿轮或皮带传动装置将动力传递到刀具系统。
3. 刀具系统刀具系统是割草机最关键的部分,主要由刀片和刀具座构成。
刀片通过旋转切割草坪上的杂草,而刀具座则固定刀片并提供支撑。
刀具系统的设计和维护对割草机的工作效果和使用寿命至关重要。
二、割草机系统的设计优化针对割草机系统的工作原理,可以进行一些设计优化,以提高割草机的效率和可靠性。
以下是几个设计优化的建议:1. 动力选择在选择割草机的动力系统时,应根据具体需要和使用场景进行选择。
内燃机可以提供较大的动力输出,适用于大面积的割草工作。
电动机则更环保无污染,适用于小面积或室内使用的割草工作。
根据具体需求选择合适的动力系统,可以提高工作效率并降低成本。
2. 刀具设计刀具是割草机系统最重要的组成部分,其设计直接影响割草机的工作效果。
在刀具设计中,应考虑刀片材质的选用、刀片尺寸的合理搭配以及刀具结构的优化。
例如,选择锋利耐磨的刀片材料,合理设计刀片的几何形状以提高切割效率和使用寿命。
3. 传动系统改进传动系统的设计是割草机系统中的关键环节。
对传动系统进行改进可以提高割草机的传动效率和可靠性。
例如,采用高效、低摩擦的传动机构,减少能量损耗和噪音产生;合理选择传动装置的材质和结构,以降低摩擦和磨损,延长使用寿命。

2018年第10期引言随着生活水平的不断提高,人们对环境质量的要求也越来越高,人们已经不仅仅满足于吃得好、穿得暖,追求更高层次的生活质量已经成为社会发展的趋势。
在这一社会背景下,植被绿化覆盖率越来越高,尤其是公路两旁为了吸收来往车辆排放的废气而种植的绿化带,一段时间后就变得参差不齐。
而传统的依靠园丁手工作业的方式劳神又费力,不能适应人们对高效率作业的要求,解决这一问题变得至关重要。
1 割草机的整体结构与工作原理1.1割草机的整体结构割草机在设计过程中为了让它既能够实现在不同地面对草坪进行修剪,又能够最大限度地避免修剪后的枝叶到处乱飞的目的,在整体布局上采用将高速旋转割草弯盖、双带啮合筒、对称收拢草结构和搅碎拨叉布置于各个部位,实现整台割草机高效协调性工作。
图1 割草机主要工作部分的整体结构1.2割草机的工作原理当割草机的工作部分遇到杂草时,前面的六个割草弯盖快速旋转,将面前的杂草修剪整齐。
两侧的收拢草结构将割草机旁边的杂草拨到中央,杂草段进入双管啮合筒,将杂草内多余水分挤压出来,后面的搅碎拨叉将前半部分的杂草碎拨齐并进行收集。
各个部分的协调合作,保证了割草机工作的正常进行。
图2 割草机工作流程图2 机械结构设计2.1割草弯盖六个割草弯盖接触紧密,转动一致,高效快速地将割草机前面的杂草进行修剪,并且高效率地将杂草传递到下一部分中去。
图3 割草弯盖结构示意图2.2双管啮合筒从割草弯盖过来的杂草碎,因为带着水分不能够更好地完成后面收集工作的存储,所以在此部分进行水分的挤压。
两个啮合筒相互交错转动,将水分更好地挤出来。
图4 双管啮合筒结构示意图2.3 搅碎拨叉通过搅碎拨叉的转动,七个转动叶快速将杂草碎再次碾轧并收集起来。
防止飞扬的杂草碎飘在空中,污染环境。
图5 搅碎拨叉结构示意图3 结论在越来越重视保护环境绿色发展的今天,环保越来越成为人们生活的一部分。
随着日常生活中绿化面积的不断扩大,依据人工修剪作业的传统作业方式已不能够满足社会的发展,所以割草机越来越能够发挥它的巨大优势,能够高效地利用自动化机械减轻工人的工作强度,减轻劳动者的工作负担。
割草机运行原理割草机是一种常见的园艺工具,用于修剪草坪和草地上过长的草。
它通过刀片在高速旋转的同时将草坪割下,让草地保持整洁美观。
割草机的运行原理是基于一系列的机械和工程原理,并通过能源转换和传动实现割草功能。
1. 深度评估和解析让我们深入评估和解析割草机的运行原理。
割草机通常由以下几个主要组成部分构成:发动机、刀片、传动系统和控制手柄。
- 发动机:割草机通常使用燃油发动机或电动发动机作为动力源。
燃油发动机通过点火系统将燃油燃烧转化为能量,并驱动刀片旋转。
电动发动机则通过电能转化为机械能,同样驱动刀片旋转。
- 刀片:割草机刀片是割草的关键部分。
刀片通常由坚固的金属制成,具有尖锐的刀刃。
刀片安装在割草机底部的刀片座上,并与发动机的动力源相连接。
当发动机启动后,刀片会快速旋转,割切草坪上的长草。
- 传动系统:割草机的传动系统起到将动力从发动机传递到刀片的作用。
传动系统通常由传动带、传动轴和传动齿轮组成。
发动机的动力经过传动带传递到传动轴上,然后通过传动齿轮的配合将动力传递给刀片,使其旋转。
- 控制手柄:割草机的控制手柄用于控制割草机的操作。
通常,控制手柄上配有启动按钮或拉线,用于启动或停止发动机。
手柄还可以控制割草机的速度和方向,以便操作者能够轻松控制割草过程。
2. 由浅入深的探讨割草机的运行原理接下来,让我们由浅入深地探讨割草机的运行原理,以便更深入地理解。
当操作者按下启动按钮或拉动启动绳索时,发动机开始工作。
燃油发动机通过点火系统将混合燃料点燃,产生爆炸力推动活塞运动。
这一过程将动能转化为旋转动能,并通过传动带传递到传动轴上。
传动轴连接到刀片座上的齿轮系统,这些齿轮通过配合使刀片开始旋转。
刀片的旋转速度和方向由传动齿轮的设计和传动比例确定。
当刀片开始旋转时,操作者将割草机控制手柄推动到草地上。
割草机底部的刀片通过对高速旋转的切割,将长草逐渐割断。
切割后的草经过割草机底部的出料口排出,可以通过操作者推动割草机的方向控制,使割草机在草地上移动并完成割草任务。
智能化割草机的设计与控制系统优化智能化割草机作为一种自动化的园艺设备,可以自主地完成草坪的修剪工作。
为了实现割草机的高效工作和智能化控制,设计与控制系统的优化变得至关重要。
本篇回复将从设计和控制两个方面进行讨论,以达到优化智能化割草机的工作性能和用户体验。
1. 设计优化1.1 强化机械结构:智能化割草机的机械结构是其工作的基础。
在设计中,应考虑使用高强度材料以增加割草机的结构稳定性和耐久性,确保其在不同草坪条件下的可靠性和稳定性。
1.2 优化刀片系统:刀片是割草机的核心部件,对割草效果有着直接影响。
为了提高效率和质量,可以采用多刀片系统来增大割草宽度,并增加刀片的旋转速度以提高修剪的精度。
此外,定期检查、清洁和磨刀,以保持刀片的锐利度。
1.3 加强安全系统:智能化割草机使用时应注重安全。
在设计中,应添加传感器来检测障碍物,以便割草机能够及时避免碰撞。
此外,还可以考虑添加密码或指纹识别系统,以确保只有授权人员可以操作割草机。
1.4 考虑人体工程学:智能化割草机的设计应考虑用户的人体工程学需求,以提供更好的使用体验。
例如,割草机的手柄和控制面板应设计合理、易于操作,使用户能够轻松控制割草机的运作。
2. 控制系统优化2.1 引入智能化控制算法:智能化割草机的控制系统需要有一个智能化的算法来指导其运行。
可以采用机器学习算法和传感器技术,对割草机进行训练和监测,以实现更智能、高效的草坪修剪。
通过不断学习和优化,割草机能够适应不同草坪的特性,并根据需求进行割草规划。
2.2 远程控制功能:为了提高用户的便利性和灵活性,可以将智能化割草机的控制系统与无线通信技术相结合,实现远程控制功能。
用户可以使用手机或智能设备通过应用程序控制割草机的启停、路径规划和割草策略,而不需要亲自操作割草机。
2.3 自动化充电系统:为了确保割草机的长时间工作,应配置自动化充电系统。
割草机在电量低下时,应能够自动返回充电桩进行充电,并在充电完成后继续工作。
智能化割草机系统设计与控制智能化割草机系统是一种集成了人工智能和自动化控制技术的创新产品。
它通过传感器和算法来感知和分析周围环境,从而能够自主地进行割草操作,并有效地追踪草坪的状态,确保草坪保持整洁、均匀和美观。
一、传感器与感知技术智能化割草机系统中的传感器负责感知周围环境,以便进行精确的草坪割草操作。
常用的传感器包括激光传感器、超声波传感器、倾斜传感器、触摸传感器等。
这些传感器可实时测量草坪的高度、坡度、障碍物的距离等数据,并将这些数据发送给控制系统进行分析和处理。
二、自动化控制系统智能化割草机系统依靠自动化控制系统来实现割草操作的自主性。
该系统包括微处理器、执行机构(电机、刀片等)和电池等组件。
微处理器根据传感器的数据进行实时分析,然后通过控制执行机构的工作,使割草机能够自主地在草坪上行走并完成割草操作。
三、路径规划与避障算法为了确保智能化割草机系统能够有效地割草并避免碰撞障碍物,路径规划和避障算法是至关重要的。
路径规划算法可以根据草坪的形状和大小,在最短时间内完成割草任务。
避障算法则可以利用传感器数据,实时检测周围障碍物,并采取相应的措施,避免与障碍物发生碰撞。
四、智能化控制功能除了基本的割草操作外,智能化割草机系统还可以具备一些智能化的控制功能,以进一步提升用户体验。
例如自动充电功能,割草机在电池电量低时能自动返回充电站进行充电;区域划分功能,用户可以通过指定划定区域,让割草机只在特定区域进行工作;手机远程控制功能,用户可以通过手机App实时监控和控制割草机的工作状态等。
五、能源管理与环境保护智能化割草机系统应采用高效的能源管理策略,以提高电池的使用效率并延长电池寿命。
例如,通过智能化的充放电控制策略,割草机可以根据草坪大小和任务进度,合理调节电池的使用,以保证割草机在工作时间内能完成割草任务。
此外,割草机还可以利用太阳能等可再生能源进行充电,减少对传统能源的依赖,实现环境友好型割草系统。
割草机的工作原理
割草机是一种用于修剪草坪的机械设备,工作原理主要包括刀片旋转和驱动系统两个方面。
首先,割草机的工作原理是基于刀片旋转。
割草机通常搭配有一个或多个刀片,刀片的旋转由发动机或电动机驱动。
发动机通常采用内燃机,而电动机则通过接通外部电源来提供动力。
在发动机或电动机的驱动下,刀片以高速旋转,通过切割的方式将草坪上过长的草叶切除。
其次,割草机的工作原理还需要考虑到驱动系统。
驱动系统主要由传动机构和轮胎组成。
传动机构包括齿轮、连杆和带动装置等零部件。
传动机构的作用是将发动机或电动机的动力传递到刀片,使其旋转。
在割草机正常工作时,刀片在切割草坪的同时也需要具备一定的推动力,以确保割草机能够顺利移动。
这时,轮胎就发挥了重要的作用。
轮胎通过与地面接触,产生一定的摩擦力,将割草机向前推动。
除了上述的基本工作原理之外,现代的割草机还常常配备一些额外的功能和技术,以提高割草的效果和用户的体验。
例如,一些割草机在刀片上方配备了航空原理的翅片,通过自身的旋转产生的气流将草叶吹起,使其在切割时更加均匀。
还有一些割草机采用多刀片设计,能够一次切割多片草叶,提高工作效率。
此外,一些高级割草机还搭载了自动导航系统,通过扫描周围环境,自动规划割草路径,实现智能割草。
总结起来,割草机的工作原理主要包括刀片旋转和驱动系统。
刀片旋转是实现切割草坪的核心,而驱动系统确保割草机能够顺利推动。
随着科技的发展,割草机的性能和功能不断提升,使得修剪草坪变得更加高效、方便和智能化。
电动割草机动力系统的设计与优化随着人们生活水平的提高,对生活品质的要求也在不断提升。
同时,环境保护和减少人工劳动力成为了人们关注的焦点。
电动割草机作为现代化的割草工具,在减少噪音污染和减轻身体劳动力负担方面发挥着重要作用。
本文将重点讨论电动割草机动力系统的设计与优化,以提高其性能和效率。
首先,电动割草机的动力系统主要由电动机和电池组成。
要设计出高效、稳定和可持续的动力系统,我们需要考虑以下几个关键因素。
1. 电动机选型:选择合适的电动机是动力系统设计中的首要任务。
电动机应具备高效能、低噪音、轻巧且耐用的特点。
一般来说,无刷电机因其高效率和长寿命的优势而被广泛应用于电动割草机。
此外,根据割草机的需求,选择合适的功率和转速范围的电动机也很重要。
2. 电池选型:电池作为割草机的能量储存装置,在一定程度上决定了割草机的工作时间和效率。
因此,在设计电动割草机时,我们需要选择具有高容量、高能量密度和长寿命的电池。
目前,锂离子电池被广泛应用于电动割草机中,因为它们具有较高的能量密度和充电效率,并且没有记忆效应。
3. 动力系统控制:动力系统的控制是确保割草机正常工作的关键。
在设计电动割草机的动力系统时,我们需要选择合适的控制方法和系统。
通常,采用PWM (脉宽调制)技术来控制电动机的转速和功率输出。
此外,还可以考虑添加过载保护、电池管理系统和智能控制功能,以提高割草机的安全性和稳定性。
在优化电动割草机动力系统的设计中,我们还可以考虑以下几个方面。
1. 重量和平衡:为了提高电动割草机的操作性和便携性,我们应该尽量减少割草机的重量,并保持割草机的平衡性。
通过合理的结构设计和材料选择,可以实现割草机的轻便化和平衡性,从而提高操作的灵活性和舒适性。
2. 力量传输和转动效率:力量传输和转动效率直接影响到割草机的工作性能和效率。
在设计和布置割草机的传动系统时,需考虑功率传输的稳定性和效率,选择合适的齿轮、传动带和轴承等零部件,减少能量损失,提高割草机的工作效率。
割草机的设计(草稿)
一、背景简介
在剪草机问世之前,草坪的修剪主要工具是镰刀,放牧牛羊也是保持草地平整的重要方法。
随着高尔夫球、网球及足球等运动的兴起,人们拥有平整美观的草地做运动场地的要求越来
越迫切。1805年英国人普拉克内特发明了第一台收割谷物并能切割杂草的机器,由人推动机
器,通过齿轮传动带动旋刀割草,这就是旋刀割草机的雏形。1830年,英国纺织工程师比尔.
布丁取得了滚筒割草机的专利,1832年兰赛姆斯农机公司开始批量生产滚筒剪草机,1902
年英国人伦敦恩斯制造了内燃机做动力的滚筒式剪草机,其原理至今还在使用。在西方发达
国家,20世纪初期,剪草机就得到了快速的发展。