单脉冲角度
- 格式:doc
- 大小:297.00 KB
- 文档页数:8
浅谈线性约束自适应单脉冲测角算法摘要:现代社会,随着导弹、卫星和宇航技术的发展,越来越多的领域需要用到雷达技术,并对其提出了越来越高的要求。
对于目标信号,雷达的任务不仅是测量距离和方位,还包括测量目标的角度,而在某些应用中为了快速地提供目标的精确坐标值,还需要采用自动测角的方法。
单脉冲测角技术定向精度高、实现简单、稳健性好,本文的工作就是围绕着单脉冲技术在阵列天线雷达中的应用展开的。
本文利用等距线阵对基于约束自适应阵列技术的单脉冲处理性能进行了仿真,结果表明:即使在主瓣和旁瓣干扰同时存在的情况下,约束自适应单脉冲处理技术也可以在约束范围内准确进行角度估计。
关键词:单脉冲技术,线性约束,算法中图分类号: tn820.5 文献标识码: a 文章编号:1、概述根据相关的研究表明无约束自适应算法,已经可以较好的抑制干扰,然而还是当存在主瓣干扰[1][2]时,单脉冲测角性能会严重下降。
当然主瓣干扰可以通过自适应波束形成方法在干扰处形成零陷抑制掉,但这也将使方向图的主波束产生明显的畸变,从而使用于角度估计的单脉冲比发生严重的失真,导致无法对目标进行正常测角及跟踪。
为了解决方向图畸变引起的单脉冲失真的问题,davis等人利用最大似然(mi)理论,提出了三种基于线阵的单脉冲表达式;nickel 提出了自适应单脉冲特性的一阶taylor展开表达式;paine提出基于最小均方误差的目标方向搜索方法[3],以自适应地确定最优差波束权值;然而,上述方法为得到校正的单脉冲比均需要很高的运算代价。
kai—bor等人提出一种对旁瓣干扰和主瓣干扰分别抑制的两级自适应单脉冲方法,而两级自适应单脉冲方法的缺点是需要准确估计主瓣干扰的相关信息,这给实际应用带来了难度;然后fante 提出了一种线性区单脉冲比约束的自适应处理方法[2],该方法实现简单,它利用了约束条件可以在抑制干扰的同时一定程度上保持单脉冲比鉴角特性不变。
2、主瓣干扰存在时自适应波束畸变的情况在现代复杂电磁环境下.除了旁瓣干扰,干扰还很可能从主瓣进入,当存在主瓣干扰时.继续采用自适应波束形成技术来抑制干扰,但此时这个方法会导致自适应方向图产生严重的畸变现象,主要表现为以下两点:一是副瓣电平增高,这将导致虚警概率的急剧上升;二是主波束严重变形,从而影响了测角的精度。
单脉冲调光三脉冲
单脉冲调光和三脉冲调光都是LED灯光调光技术中常见的方法。
首先,让我们来看看单脉冲调光。
单脉冲调光是一种简单的LED调
光技术,它通过改变LED灯的通电时间来控制亮度。
当LED灯接收
到一个脉冲信号时,它会发光,而当没有脉冲信号时,LED灯则不
发光。
通过改变脉冲信号的宽度和频率,可以实现LED灯的调光效果。
这种方法简单易行,但可能会引起闪烁和视觉不适的问题。
而三脉冲调光则是一种更先进的LED调光技术。
它通过在一个
周期内将LED的通电时间分成三个部分来实现调光。
这三个部分分
别是导通角、续流角和关断角。
通过控制这三个部分的时间比例,
可以实现LED灯的精细调光,同时减少闪烁和视觉不适的问题。
相
比单脉冲调光,三脉冲调光技术可以提供更稳定和舒适的光照效果。
从技术角度来看,单脉冲调光和三脉冲调光都有各自的优缺点。
单脉冲调光简单易实现,成本低,但容易出现闪烁和视觉不适;而
三脉冲调光技术能够提供更稳定和舒适的光照效果,但实现起来相
对复杂,成本也较高。
因此,在实际应用中,需要根据具体的场景
和要求来选择合适的调光技术。
此外,从能源效率的角度来看,三脉冲调光技术相对于单脉冲调光技术能够更好地实现能源的节约,因为它可以更精细地控制LED的亮度,从而在满足照明需求的同时减少能源的消耗。
综上所述,单脉冲调光和三脉冲调光都是LED灯光调光技术中常见的方法,它们各自有着不同的特点和适用场景。
在选择LED调光方案时,需要综合考虑技术实现、成本、光照效果和能源效率等因素,以找到最适合的解决方案。

单脉冲天线角度跟踪模拟技术苏勋【摘要】通过对单脉冲天线方向图数学模型的研究,提出了一种角度跟踪模拟方法.采用信标和数控衰减器组合的方式,结合VxWorks操作系统成功实现了天线主、副瓣信号的模拟,工程应用情况良好,对当前武器装备仿真模拟训练系统的研制具有重要的参考价值.【期刊名称】《电讯技术》【年(卷),期】2012(052)006【总页数】4页(P948-951)【关键词】测控系统;单脉冲天线;天线方向图;偏离角模拟;天线副瓣【作者】苏勋【作者单位】中国西南电子技术研究所,成都610036【正文语种】中文【中图分类】TN82;V556仿真模拟训练系统的研制是当前武器装备建设的重要内容,在测控领域已经引起了广泛关注。
对靶场测控系统使用的训练模拟器而言,模拟内容包括角跟踪性能模拟、距离和速度动态模拟[1-3]、遥测遥控功能模拟、数传接收解调性能模拟等多项具体内容,其中角跟踪性能的仿真模拟难度较大。
测控系统中角度捕获是关键,它关系到整个测控活动的成败。
S频段测控系统可以通过跟踪过境卫星进行角度捕获的任务演练,但对于C频段测控系统,由于没有过境的低轨卫星跟踪,测控系统缺少一种可随时对设备跟踪性能进行检查、模拟演练的环境,因此有必要研究一种角跟踪模拟设备,与测控系统的天线与接收分系统一起构成角跟踪闭环系统,通过模拟各种测控活动前的校相过程、实际捕获过程,以达到对岗位人员进行实景训练提升技能的目的。
角跟踪模拟器以射频信号源、数控衰减器、数控移相器、信号处理单元为基础构建硬件模拟环境,模拟信号从高频接收机场放输入端注入测控系统。
根据天线和路/差路信号幅度归一化数学模型进行波束跟踪信号仿真,可得到天线波束捕获目标过程中完整的和路/差路信号电平、天线偏离角、误差电压理论值等原始数据;通过天线对塔标校可获得跟踪系统的AGC-S/Υ曲线、和路与差路信号在波束内的真实幅度差值。
据此可建立天线偏离角与角误差信号之间的参数映射表,存储在信号处理单元中以备调用。
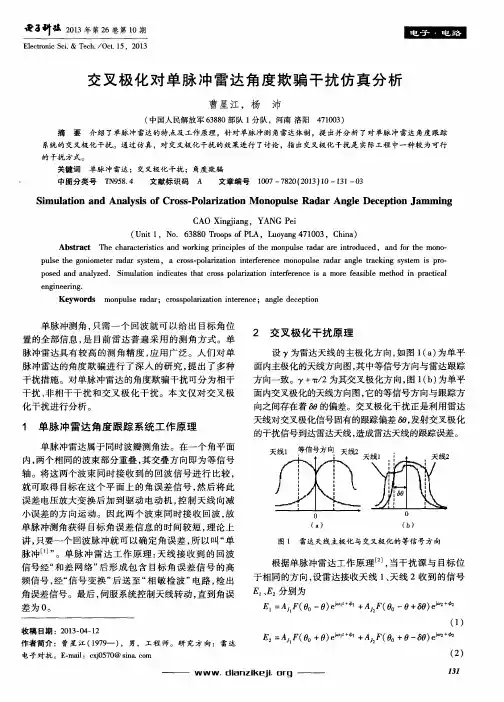
比幅单脉冲测角波束指向偏差分析朱灿;钱国栋;张宁;匡华星【摘要】主要阐述了被动超视距相控阵雷达中波束指向偏差对比幅测角精度的影响.研究了面阵存在倾斜时波束方向图切割方法和工程中面阵安装精度对波束指向的影响,提出了被动相控阵雷达比幅测角时方向图切割准则与面阵安装精度要求.理论仿真和工程实践结果证明了所提出方法的正确性.【期刊名称】《雷达与对抗》【年(卷),期】2018(038)002【总页数】4页(P10-13)【关键词】被动相控阵雷达;比幅测角;波束方向图切割;面阵安装精度【作者】朱灿;钱国栋;张宁;匡华星【作者单位】中国船舶重工集团公司第七二四研究所,南京211153;海军驻南京地区雷达系统军事代表室,南京210003;中国船舶重工集团公司第七二四研究所,南京211153;中国船舶重工集团公司第七二四研究所,南京211153【正文语种】中文【中图分类】TN955.20 引言多数战术三坐标雷达和超远程相控阵雷达均采用单脉冲测角方法来获得目标的角度信息[1],即通过形成两个天线波束方向图,对它们接收到的回波信号进行幅度或相位比较,再通过内插运算来确定目标偏离中心位置的角度。
在被动超视距相控阵雷达中,由于目标辐射源方向及其运动特性未知,通常采用同时多个独立的、主瓣相邻的接收波束进行方位扇区覆盖,以提高辐射源截获概率,缩短截获时间。
此时,对于同一个辐射源信号来说,存在一对相邻波束分别输出最强和次强信号,可通过双波束比幅测角的方法进行辐射源方位测向,即通过比较相邻波束输出信号包络幅度的相对大小来确定辐射源的方位。
[2]比幅单脉冲测角误差来源于波束指向偏差和比幅区间内波束方向图畸变导致的波束中心偏移量误差。
大多数研究从接收信号的信噪比变化[3]、通道幅相一致性[4-5]等方面展开测角误差理论分析。
本文主要从工程实现角度出发,在分析双波束比幅测角原理的同时,对单脉冲比幅测角工程应用中天线波束方向图切割方法和面阵安装精度对测角精度的影响进行了研究。
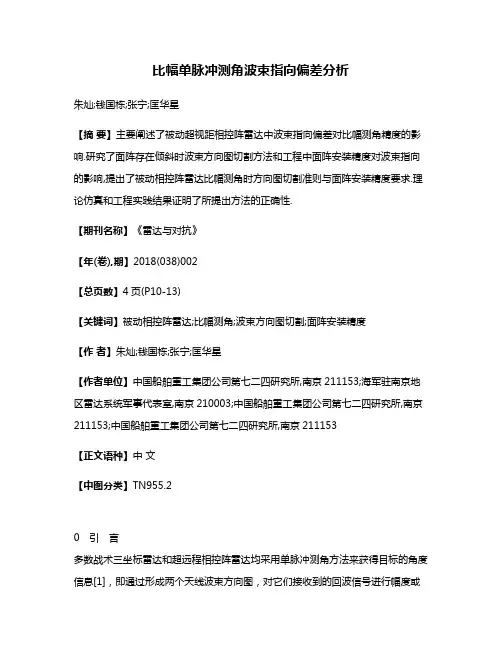
单脉冲雷达四通道联合的高分辨测角新方法戴幻尧;王建路;韩慧;周波;汪连栋【摘要】常规单脉冲雷达具有方位、俯仰二维角度的测量能力,其角度分辨力取决于天线波束宽度,对主波束宽度内的双/多目标不具备分辨能力.为了提高传统单脉冲雷达测角分辨能力,提出一种新的单脉冲雷达系统结构,巧妙的提取和利用了雷达对角线差通道的接收信号;提出了一种四通道联合单脉冲测角新方法,一次脉冲测量即可同时获得主波束范围内2个目标的二维角度信息,显著提高单脉冲雷达的角度分辨能力.该算法简单便于工程实现,并且在不同信噪比和2目标回波功率比条件下都具有很好的稳定性.最后,通过仿真分析验证了方法的有效性.%The conventional monopulse radar has the ability to measure the elevation and azimuth angles,and the angular resolution depends on the width of antenna beam,normally it can't distinguish two or multiple targets in the main beam.In order to improve the angular resolution of conventional monopulse radar,a novel system structure of monopulse radar is proposed,and a new solution to raise the angle resolution using a single pulse of four channels is presented.This new method skillfully chooses and uses the received signal of diagonal difference channel,and it can simultaneously derive two targets' twodimension angular information at main beam during one measuring process,so the new method can distinctly improve the angular resolution capability.The algorithm is simple and easy to carry out,and its stability is very good on the condition of different SNR and different return power ratio.Numerical simulations have demonstrated the effectiveness of the approach proposed.【期刊名称】《现代防御技术》【年(卷),期】2017(045)003【总页数】6页(P98-103)【关键词】四通道单脉冲;对角差信号;角度分辨力;高分辨;测角;主瓣内【作者】戴幻尧;王建路;韩慧;周波;汪连栋【作者单位】电子信息系统复杂电磁环境效应国家重点实验室,河南洛阳471003;中国洛阳电子装备试验中心,河南洛阳471003;中国洛阳电子装备试验中心,河南洛阳471003;电子信息系统复杂电磁环境效应国家重点实验室,河南洛阳471003;中国洛阳电子装备试验中心,河南洛阳471003;电子信息系统复杂电磁环境效应国家重点实验室,河南洛阳471003【正文语种】中文【中图分类】TN958.4;TP391.9单脉冲雷达由于测角精度高,得到了广泛应用[1-7]。
雷达基础知识雷达⼯作原理 雷达即⽤⽆线电的发现⽬标并测定它们的空间位置。
那么你对雷达了解多少呢?以下是由店铺整理关于雷达知识的内容,希望⼤家喜欢! 雷达的起源 雷达的出现,是由于⼀战期间当时英国和德国交战时,英国急需⼀种能探测空中⾦属物体的雷达(技术)能在反空袭战中帮助搜寻德国飞机。
⼆战期间,雷达就已经出现了地对空、空对地(搜索)轰炸、空对空(截击)⽕控、敌我识别功能的雷达技术。
⼆战以后,雷达发展了单脉冲⾓度跟踪、脉冲多普勒信号处理、合成孔径和脉冲压缩的⾼分辨率、结合敌我识别的组合系统、结合计算机的⾃动⽕控系统、地形回避和地形跟随、⽆源或有源的相位阵列、频率捷变、多⽬标探测与跟踪等新的雷达体制。
后来随着微电⼦等各个领域科学进步,雷达技术的不断发展,其内涵和研究内容都在不断地拓展。
雷达的探测⼿段已经由从前的只有雷达⼀种探测器发展到了红外光、紫外光、激光以及其他光学探测⼿段融合协作。
当代雷达的同时多功能的能⼒使得战场指挥员在各种不同的搜索/跟踪模式下对⽬标进⾏扫描,并对⼲扰误差进⾏⾃动修正,⽽且⼤多数的控制功能是在系统内部完成的。
⾃动⽬标识别则可使武器系统最⼤限度地发挥作⽤,空中预警机和JSTARS这样的具有战场敌我识别能⼒的综合雷达系统实际上已经成为了未来战场上的信息指挥中⼼。
雷达的组成 各种雷达的具体⽤途和结构不尽相同,但基本形式是⼀致的,包括:发射机、发射天线、接收机、接收天线,处理部分以及。
还有电源设备、数据录取设备、抗⼲扰设备等辅助设备。
雷达的⼯作原理 雷达所起的作⽤和眼睛和⽿朵相似,当然,它不再是⼤⾃然的杰作,同时,它的信息载体是⽆线电波。
事实上,不论是可见光或是⽆线电波,在本质上是同⼀种东西,都是电磁波,在真空中传播的速度都是光速C,差别在于它们各⾃的频率和波长不同。
其原理是雷达设备的发射机通过天线把电磁波能量射向空间某⼀⽅向,处在此⽅向上的物体反射碰到的电磁波;雷达天线接收此反射波,送⾄接收设备进⾏处理,提取有关该物体的某些信息(⽬标物体⾄雷达的距离,距离变化率或径向速度、⽅位、⾼度等)。
步进电机控制方法
步进电机是一种常用的电动机,它通过控制电流脉冲的频率和方向来实现旋转运动。
下面将介绍几种常见的步进电机控制方法。
1. 单脉冲控制:这种方法简单直接,通过给步进电机施加一个脉冲信号来控制其步进角度,每个脉冲代表一个步进角度。
但是由于只控制脉冲的频率和方向,无法准确控制电机的位置。
2. 双脉冲控制:这种方法在单脉冲控制的基础上,加入了一个脉冲信号来标记零点位置。
通过控制脉冲信号的频率和方向,可以实现步进电机的精准定位。
但是双脉冲控制需要额外的硬件电路支持,复杂性较高。
3. 微步进控制:微步进控制是一种更加精细的步进电机控制方法。
它通过改变脉冲信号的宽度和相位来控制电机的旋转角度,可以实现更高的分辨率和平滑的运动。
但是微步进控制需要更复杂的电路和算法支持。
除了以上几种常见的步进电机控制方法外,还有其他的一些高级控制方法,如闭环控制、矢量控制等,用于实现更精确的控制效果。
具体选择哪种控制方法,可以根据实际应用需求和成本考虑。
对网络信息对抗与电子信息对抗的分析现现在的时期是信息的时期,天天都会有大量的信息流通或交互,但自从斯诺登曝光美国政府的“棱镜”打算以后,信息平安问题也成了每一个人乃至整个国家所不能不重视的问题,而网络信息对抗技术与电子信息对抗技术也成了那个问题的核心。
一、网络信息对抗1。
网络解决技术要紧有效劳拒绝型解决、利用型解决、信息搜集型解决、假消息解决、破坏型解决、密码解决和辨别解决。
随着运算机及其网络技术的进展,网络解决技术已从初期的单一解决方式(口令破解、拒绝效劳、特洛伊木马)进展到今天的综合解决方式(如网络欺骗解决、散布式拒绝效劳解决和散布式网络病毒解决相结合)。
依照网络对抗的4个层次,即实体(物理)层次、能量层次、逻辑层次和超逻辑层次,其相应的网络解决方式要紧有物理层次的解决、能量层次的解决、逻辑层次的解决和超逻辑层次的解决。
1。
1 物理层次的网络解决物理层次的网络解决主若是破坏信息技术、通信装备的靠得住性或中断可用的数据信息,解决要紧以军用网络为目标、以硬杀伤为要紧手腕,破坏行动可利用火力摧毁和特种军队,也可采纳高新技术武器,如芯片细菌、微米/纳米机械人等来解决敌方运算机网络中的重要部件或接口装备,专门是破坏运算机的中央处置器、硬盘、存储芯片,和与其他设备互换数据的接口部位。
物理层次的网络解决具有完全性、不可逆性。
1。
2 能量层次的网络解决能量层次的网络解决主若是采纳诸如电磁脉冲炸弹一类的高功率定向能武器。
电磁脉冲进攻能产生庞大的破坏作用,会破坏通信装备、通信基础设施、卫星导航、目标跟踪传感器、导弹防御系统,乃至给整个国家造成灾难性的阻碍。
1 。
3 逻辑层次的网络解决逻辑层次的网络解决要紧以软杀伤的形式显现,目前最有效的网络解决方式有:a)利用运算机病毒或蠕虫、特洛伊木马、逻辑炸弹等歹意代码,改变、操纵程序。
b)采纳散布式拒绝效劳解决。
c)利用多变代码技术、反侦破技术和跳板式解决技术,逃避入侵检测系统的检测,绕开防护墙,悄然侵入、潜入网络的隐蔽解决。
第十三章单脉冲天线一、引言单脉冲雷达体制系统,主要用于高速目标的跟踪定位。
如飞机、导弹、火箭、人造卫星的跟踪。
单脉冲雷达系统中的天线称为单脉冲天线。
单脉冲雷达天线要求产生一个主瓣的和波束,以及具有两个(或四个)主瓣的差波束,如下图13-1 所示。
差波束的两个峰值之间的最小值称为“零值”。
和波束的作用是探测目标的距离(r)并行距离跟踪;差波束的作用是探测目标的方位角和俯仰角信息()并行角跟踪。
一个目标的距离信息r和角信息「宀已知,则目标的空间位置就确定了。
如果目标正好在和波束最大值方向,则差波束接收到的信号很弱(为零值);当目标移动时,则差波束接收到的信号由弱变强,则可利用差信号来驱动伺服机构,使天线在俯仰或方位上转动,始终使差波束的零值方向对准目标,从而实现跟踪。
图13-1单脉冲天线方向图、单脉冲天线组成。
在雷达应用中,单脉冲天线可采用阵列天线,也可采用反射面和单脉冲馈源组成。
如果是后者,则馈源一般采用多个(4个)叭或者单口多模喇叭。
形成差波束的关键是使用了比较器(和差器)o三、分类。
根据比较回波信号的幅度和相位,单脉冲分为幅度单脉冲、相位单脉冲和幅相单脉冲,它们的主要区别在于天线。
无论是幅度还是相位单脉冲,为了确定目标在某一平面的角度(方位、俯仰),都要求同时产生两个形状相同的波束。
这里只讨论幅度单脉冲(比幅)o 四、工作原理。
为了说明问题,先考虑一个平面(俯仰面)内单脉冲技术的工作原理。
当一个横向偏焦的喇叭,置于抛面焦点附近时天线将产生一个偏离天线轴的波瓣,其波束偏移角廷正比于偏焦距离x。
为了获得两个对称于天线轴,并有相同偏移角3的波瓣,图13-2幅度比较单脉冲可用两个对称于天线轴的横向偏焦喇叭来完成,如图13-2若探测到一个目标,来自A方向,这时两波束收到的回波信号,相位相同, 但幅度不等。
两信号相减形成的差信号是目标方向的函数。
这个差信号的大小,表示了目标偏离天线轴向角度的大小,差信号的正负,则表示目标偏向哪一边。
“雷达原理”
作业报告
题目关于单脉冲角度跟踪在雷达系统中的
应用的研究
学生
年级
班级
学号
专业
学院
摘要介绍了单脉冲雷达角跟踪系统的组成及比幅度单脉冲角跟踪原理,同时置零法原理,并对同时置零法进行了计算机仿真。
引言
单脉冲测角,顾名思义即只需要一个回波脉冲,就可以给出目标角位置的全部信息。
它不仅能够抑制幅度调制的干扰信号,并且具有较强的跟踪干扰源的能力,成为目前雷达普遍采用的测角方式。
1脉冲雷达角跟踪系统的组成及比幅度原理
单脉冲雷达角跟踪系统一般由扫描天线以及信号变换(混频、中放等)、相敏检波和伺服系统组成,其系统的组成如图l所示。
其中和差网络完成和、差处理,形成和差波束。
信号变换用以变换信号参数之间的相位关系。
相敏检波形成角跟踪误差信号。
伺服系统根据角跟踪误差信号控制天线的转动。
图1 角跟踪系统组成框图
基本工作原理为:天线接收到的回波信号经“和差网络”后形成包含目标角误差信号的高频信号,经“信号变换”(包括混频、中放等)后送至“相敏检波”电路,检出角误差信号。
最后,伺服系统控制天线转动,直到角误差为0(天线电轴对准目标)。
2 比幅度单脉冲角跟踪原理
角误差信号。
雷达天线在一个角平面内有两个部分重叠的波束, 如图1 所示, 振幅和差式单脉冲雷达取得角误差信号的基本方法是将这两个波束同时收到的信号进行和、差处理, 分别得到和信号与差信号。
其中差信号即为该角平面内的角误差信号。
设和信号为EΣ,其振幅为两信号振幅之和, 相位与到达和端的两信号相位相同,且与目标偏离天线轴线的方向无关。
假定两个波束的方向性函数完全相同, 设为F(θ), 两波束接收到的信号电压振幅为
E1、E2,并且到达和差比较器Σ 端时保持不变, 两波束相对天线轴线的偏角为δ, 则对于方向θ的目标,和信号的振幅表达式如下:
式中,为接收和波束方向性函数,与发射和波束的方向性函数完全相同。
图2 单脉冲比幅测角原理图
在和差比较器的Δ(差)端,两信号反相相加, 输出差信号, 设为EΔ。
若到达Δ端的两信号用E1、E2表示,它们的振幅仍为E1、E2,但相位相反, 则差信号的振幅为:
现假定目标的误差角为ε,则差信号振幅为。
在跟踪状态, 很
小,将F (ε) 展开成台劳级数并忽略高次项, 则:
因ε很小,上式中 , 。
由上式可知, 在一定的误差角范围内,差信号的振幅EΔ与误差角ε成正比。
EΔ的相位与E 1、E 2中的强者相同.例如, 若目标偏在波束1 一侧, 则E 1>E 2,此时EΔ与E 1同相,反之,则与E 2同相。
由于在Δ端E 1、E 2 相位相反,故目标偏向不同,EΔ的相位差180°。
因此,Δ端输出差信
号的振幅大小表明了目标误差角ε 的大小,其相位则表示目标偏离天轴线的方向。
3 同时置零法原理
由于实际单脉冲跟踪雷达的工作环境往往存在干扰,并且干扰信号的功率会远大于目标回波信号,所以必须采取某种办法抑制干扰。
线性约束最小方差算法是一种经常使用的DBF算法。
该算法在期望信号方向上,保持固定常数的增益,同时使得波束形成器在输出功率上达到最小,从而使得干扰和噪声对于输出的影响最小。
部分自由度在期望信号方向上形成波束,其余自由度在干扰方向上形成零陷。
LCMV 算法用公式可以表示为:
ω是权重系数,R 是输入信号的协方差矩阵,C 是约束方向的导向性矢量,f 是矢量。
上式的最优解为
LCMV 算法的权重系数亦可以通过迭代的方式来求解。
设定X(k)是N×1 的数据向量,C 是N×1 的约束向量,W(k)是N×1 自适应权重向量。
那么基本的LCMV 算法可以如下表示:
,
其中,, f 是响应向量。
可以利用超分辨DOA 算法(如MUSIC 算法),预先知道期望信号和干扰信号的方向,所以可以假设期望信号的方向和干扰信号的方向是已知的。
利用LCMV 算法分别形成波束1 和波束2,波束1 和波束2 分别指向期望信号方向的左侧和右侧某个小角度,并且它们关于期望信号方向是对称的。
同时,LCMV 算法对于波束1 和波束2,在上干扰方向上同时产生零陷,那么由波束1、波束2 的和产生的和波束,以及由波束1、波束2 之差产生的差波束,都将同时在干扰方向上形成零陷,达到抑制干扰的目的。
4计算机仿真结果
仿真中采用半波长均匀线阵,阵元个数为20 个。
一个期望信号,方向是0 度,一个干扰信号,角度是20 度。
信噪比SNR=10dB,干扰噪声比INR=60dB。
波束1 和波束2 的指向分别在2 度和-2 度的位置上。
图4.1 波束天线方向图
由波束1 和波束2 产生的和波束和差波束方向图如图4.2、4.3。
图4.2 和波束天线方向图
图4.3 差波束天线方向图
从方向图上可以看出,和、差波束同时在干扰方向20 度的地方产生了一个零陷。
角度误差电压随误差角度的变化曲线如图4.4所示.
图4.4 测向曲线
误差电压信号随着误差角度的增大而增大,并且误差角度的正负决定了误差电压相对与和波束电压的相位差,是相差0 度还是180 度。
仿真中,采用单载频矩形脉冲信号,载波频率为10MHz,脉冲宽度为1us,脉冲重复周期为1ms,观察不同误差角度下的回波信号,如图4.5所示。
图4.5 不同偏角的误差电压信号
5结论
本文介绍了和、差波束同时置零的单脉冲角度跟踪算法,利用现有的比较稳健的DBF 算法,有效的抑制了大功率干扰对角度跟踪带来的误差,对于单脉冲测角性能的提高起到了一定的作用。
参考文献
[1] 李朝伟单脉冲雷达主波束内多目标的检测方法.电子学报,2006(6):1026-1030
[2] 赵永波一种多目标情况下的单脉冲测角方法. 西安电子科技大学学报, 2005(32):383-386
[3] 张江华单脉冲雷达测角特性的分析, 火控雷达技术2005(34):55-58
[4] 王玮DBF 算法研究及其硬件实现
[5] 丁鹭飞,耿富录. 雷达原理.西安电子科技大学出版社,1995年。