一种基于路段惩罚法的合理路径集生成算法
- 格式:pdf
- 大小:239.05 KB
- 文档页数:6
TSP的几种求解方法及其优缺点一、什么是TSP问题旅行商问题,简称TSP,即给定n个城市和两两城市之间的距离,要求确定一条经过各城市当且仅当一次的最短路线。
其图论描述为:给定图G=(V,A),其中V为顶点集,A 为各顶点相互连接组成的边集,设D=(dij)是由顶点i和顶点j之间的距离所组成的距离矩阵,要求确定一条长度最短的Hamilton回路,即遍历所有顶点当且仅当一次的最短距离。
旅行商问题可分为如下两类:1)对称旅行商问题(dij=dji,Πi,j=1,2,3,⋯,n);2)非对称旅行商问题(dij≠dji,ϖi,j=1,2,3,⋯,n)。
非对称旅行商问题较难求解,我们一般是探讨对称旅行商问题的求解。
若对于城市V={v1,v2,v3,⋯,v n}的一个访问顺序为T={t1,t2,t3,⋯,t i,⋯,t n},其中t i∈V(i=1,2,3,⋯,n),且记t n+1=t1,则旅行商问题的数学模型为:minL=。
TSP是一个典型的组合优化问题,并且是一个NP完全难题,是诸多领域内出现的多种复杂问题的集中概括和简化形式,并且已成为各种启发式的搜索、优化算法的间接比较标准。
因此,快速、有效地解决TSP有着重要的理论价值和极高的实际应用价值。
二、主要求解方法基于TSP的问题特性,构造型算法成为最先开发的求解算法,如最近邻点、最近合并、最近插入、最远插入、最近添加、贪婪插入等。
但是,由于构造型算法优化质量较差,迄今为止已开发了许多性能较好的改进型搜索算法,主要有:1)模拟退火算法2)禁忌搜索算法3)Hopfield神经网络优化算法4)蚁群算法5)遗传算法6)混合优化策略2.1模拟退火算法方法1)编码选择:采用描述TSP解的最常用的一种策略——路径编码。
2)SA状态产生函数的设计:对于基于路径编码的SA状态产生函数操作,可将其设计为:①互换操作(SWAP);②逆序操作(INV);③插入操作(INS)。
3)SA状态接受函数的设计:min{1,exp(-△/t)}>random[0,1]准则是作为接受新状态的条件最常用的方案,其中△为新旧状态的目标值差,t为”温度”。
运营管理基于时空路径匹配的城市轨道交通新型清分算法马怀清1,杨德明2(1.深圳市地铁集团有限公司,广东深圳518035;2.深圳市城市交通规划设计研究中心股份有限公司,广东深圳518057)摘要:大多城市选择传统的“分配型”模型对轨道客流进行清分,即按照既定固化比例进行清分,未充分考虑乘客和列车的实际运行状态,导致清分结果存在一定偏差。
为进一步研究解决传统清分算法导致的偏差问题,提出基于时空路径匹配的客流清分模型,基于乘客刷卡数据和列车实际运行ATS数据,对乘客个体OD出行过程进行全方案搜索,同时融合手机信令等多元大数据,实现乘客-列车的精准匹配。
通过路网建模、乘车方案搜索与匹配,得出的客流清分结果,经采集手机信令数据进行分析验证,证明基于时空路径匹配的清分算法适用于轨道交通客流清分要求,可为轨道交通运营组织、客流调度、应急指挥等提供决策支持。
关键词:轨道交通;清分模型;时空路径匹配;客流清分中图分类号:U231 文献标识码:A 文章编号:1001-683X(2024)03-0118-07 DOI:10.19549/j.issn.1001-683x.2023.07.12.00030 引言轨道交通由于准点、快速、安全以及节能减排效果显著等特点,在公共交通体系中扮演着越来重要的角色,目前已成为缓解城市交通拥堵矛盾的重要手段。
随着各大城市轨道交通网络化运营快速推进,尤其运营主体多元化发展,对轨道客流及票务清分要求越来越高。
客流的精准清分与否关乎线路客流断面、车站换乘客流等精度的计算,影响运输组织方案。
当前,我国轨道交通客流清分模型大多采用“两阶段双比例”概率清分模型,经实际验证,该模型在清分精度和合理性方面存在一定问题,给地铁客流清分和票务收入清算造成一定困扰。
随着手机信令数据、列车载重数据、视频数据等多元大数据应用技术的发展,利用乘客刷卡数据、列车实际运行数据等进行融合分析,构建基于时空路径匹配的清分算法成为当前客流清分研究的热点。
智能交通中的路径规划算法优化智能交通是一种高效便利的交通方式,它不仅可以提高交通系统的资源利用效率,还可以增强交通系统的安全性和信息化水平。
在智能交通领域,路径规划是一个关键的技术,它可以为驾驶员和交通管理者提供更好的选择和决策。
路径规划指的是在交通网络中,通过计算成本、参数等多个因素,从起点到终点之间选择最短或最优的路径。
对于自动驾驶汽车、物流配送、紧急救援等应用场景,路径规划的优化是非常重要的。
本文将围绕路径规划算法的优化展开讨论。
一、传统路径规划算法的缺点在传统的路径规划算法中,通常基于Dijkstra算法和A*算法,这些算法主要是基于贪心策略或启发式算法,而且仅考虑了单一的成本因素。
传统算法在某些场景下会出现以下问题:1. 计算复杂度高。
传统算法需要计算所有的路线,并且需要同时考虑多种因素,如距离、通行时间、交通状况、天气等因素,因此计算量相当大。
2. 无法处理多种交通状况。
当路况发生变化时,传统算法需要重新计算所有的路径,因为他们没有实时的交通状况数据。
3. 不适用于复杂场景。
在某些复杂场景下,如城市中心区域和高速公路网,传统算法会出现问题,因为空间复杂度和维度太高,无法考虑所有变量。
二、路径规划算法的优化方向由于传统路径规划算法的缺点,人们开始寻找新的算法来实现路径规划的优化。
以下是一些可行的优化方向:1. 基于机器学习的路径规划算法。
随着机器学习和深度学习的普及,许多研究人员已经探索过基于机器学习的路径规划算法。
这些算法可以根据历史交通数据分析出最佳路线,并考虑实时交通数据和预测交通变化的影响。
这些算法需要从数据中学习规律,模型的准确性和可靠性主要取决于数据的质量和特征选择。
2. 基于物理模拟的路径规划算法。
虽然机器学习可以根据历史数据学习规律,但它们不一定能反映物理规律或车辆行为。
另一种方法是通过基于物理模拟的路径规划算法,它可以考虑车辆的加速度、转向等物理规律,并基于这些规律来实现路径规划。
智能交通系统中的路径规划与优化方法智能交通系统是利用先进的信息技术和传感器设备对交通实时情况进行监测、收集、分析和处理,以实现交通流量优化、拥堵缓解、出行效率提升等目标。
路径规划与优化方法是智能交通系统中的关键技术之一,它能够为交通参与者提供最佳的出行路径,从而降低通行时间、提高出行效率。
本文将讨论智能交通系统中的路径规划与优化方法,并介绍其中的几种常用算法。
1. Dijkstra算法Dijkstra算法是一种经典的图搜索算法,被广泛应用于路径规划中。
该算法通过计算起点到其他节点的最短路径来确定最佳路径。
它将节点分为两个集合:已知最短路径的节点和未知最短路径的节点。
通过迭代计算,每次选择从起点出发到一个未知节点的最短路径,并更新起点到其他节点的最短路径。
最终,得到起点到所有节点的最短路径。
2. A*算法A*算法是一种启发式搜索算法,在路径规划中被广泛应用。
该算法根据启发函数估计从当前节点到目标节点的最佳路径,并通过优先级队列来选择下一个节点进行搜索。
启发函数通常使用两个评估值:代价函数(估计从起始节点到当前节点的代价)和启发函数(估计从当前节点到目标节点的代价)。
通过评估这两个值的和,A*算法选择具有最小总代价的节点进行搜索,直到找到目标节点为止。
3.遗传算法遗传算法是一种模仿生物进化过程的优化算法,在路径规划中常被用来寻找最佳路径。
该算法通过对路径进行编码,将路径表示为一系列基因。
然后使用选择、交叉和变异等运算,生成新的路径,并根据某个适应度函数对路径进行评估和选择。
经过多代迭代之后,遗传算法可以找到最优解。
4.模拟退火算法模拟退火算法是一种启发式优化算法,通过模拟固体物质在退火过程中的原子运动,来寻找最优解。
在路径规划中,模拟退火算法将路径抽象为一个状态空间,并通过随机的状态转移来搜索最优路径。
通过温度的递减和接受差解的概率,模拟退火算法可以在解空间中逐渐收敛,找到最优解。
5.禁忌搜索算法禁忌搜索算法是一种基于迭代局部搜索的优化算法,常被用于路径规划中。
动态路网中基于实时路况信息的分布式路径生成算法
龙其;叶晨;张亚英
【期刊名称】《计算机科学》
【年(卷),期】2014(041)009
【摘要】动态路网中的寻路问题在交通诱导和交通流仿真中有重要意义.提出一种基于实时路况信息的分布式路径规划算法,根据安装在道路路口的智能摄像头所采集到的交通参数对路口的畅通程度进行建模,估算车辆在路口间通行需要的时间.当有车辆需要交通诱导时,通过智能摄像头之间的网络进行基于网络路由思想的分布式最短路径寻路,在寻路过程中加入延时发送机制.网络中的智能摄像头根据车辆所在路口的畅通程度和到邻近路口的距离设置一定的延时,来广播路径询问数据包,使数据包能模拟当前的路况,从而有效、迅速地获得路径规划的结果.
【总页数】5页(P259-262,278)
【作者】龙其;叶晨;张亚英
【作者单位】同济大学电子与信息工程学院上海 201804;同济大学嵌入式系统与服务计算教育部重点实验室上海 201804;同济大学嵌入式系统与服务计算教育部重点实验室上海 201804
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.基于四叉树的分形地形实时动态生成算法 [J], 王洪瑞;陈伟磊;刘秀玲
2.基于动态锁技术的分布式实时文本协同编辑算法 [J], 周洋鸥;陈毛狗
3.动态车辆路径问题中实时信息生成算法 [J], 王江晴;康立山
4.LEO卫星网中基于地理位置的分布式动态路由算法的研究 [J], 徐小龙;王汝传
5.多移动机器人路径规划研究算法
—基于分布式实时仿真系统 [J], 周莹莹;张东涛;张玉华
因版权原因,仅展示原文概要,查看原文内容请购买。
城市道路汽车自动驾驶路径生成算法赵倬祺;张引;张琨;王严【摘要】文章通过离散化候选路径与参考路径之间的横向距离和车辆行驶过参考路径的弧长,形成多个目标状态.状态包括位置和方向.根据车辆当前状态和目标状态,求解五次多项式,使车辆与目标状态中间形成平滑连接.使用弗莱纳公式,将多项式上的点转换到参考路径平面坐标下,即形成候选路径.同时对平顺性、行驶偏差、路径长度计算路径代价,使用人工势场计算障碍物代价,选取最优路径.【期刊名称】《汽车实用技术》【年(卷),期】2018(044)004【总页数】3页(P38-40)【关键词】人工势场;弗莱纳标架;代价函数【作者】赵倬祺;张引;张琨;王严【作者单位】华晨汽车工程研究院,辽宁沈阳 110141;华晨汽车工程研究院,辽宁沈阳 110141;华晨汽车工程研究院,辽宁沈阳 110141;华晨汽车工程研究院,辽宁沈阳110141【正文语种】中文【中图分类】U461.6前言汽车自动驾驶研究中,应用了大量自动控制及机器人控制算法,但由于应用场景的差异以及对动态性的高度需求,出现了许多适用于特定场景的路径生成算法。
例如泊车工况下,要求车辆可以倒退;非结构化道路下,仅有终点状态和障碍物约束,不限制中间运动状态;而结构化道路要求车辆以相对平稳的状态在车道内行驶或换道。
非结构化场景工况常用的算法包括启发式搜索、维诺图、快速扩展随机树[5]、人工势场[7]等。
其中 A*[6]和快速扩展随机树,以及其优化算法和得到了广泛应用,并在其原模型基础上加入了阿克曼转向约束。
结构化道路受到约束较少,主要以离散化车辆可能行驶路径再进行筛选的方式生成路径;也有一些路径生成算法使用了迭代优化的方式。
在车辆可能行驶路径离散化过程中,受道路曲率或曲线表达式的影响,为保证离散过程中的鲁棒性,算法需要许多特殊处理。
本文使用的路径生成算法使用离散化车辆相对参考路径的偏移量的方式,提高算法鲁棒性。
同时将人工势场加入路径的代价函数计算中,实现避障。
面向复杂场景的智能车辆局部路径规划算法
闫春来;徐聪;刘咏诗;潘常春;孙凯
【期刊名称】《传感器与微系统》
【年(卷),期】2024(43)6
【摘要】针对复杂道路环境的实时规划问题,提出一种新的智能车辆局部路径规划算法。
首先,利用Frenet坐标系将车辆运动解耦为独立的横向和纵向运动。
其次,根据车辆的初始配置和目标配置,借助多项式法求得车辆的路径集合。
进行路径可行性检查得到候选路径集,并将行车风险场(DRF)理论和最小化加速度变化率引入到路径规划中,使规划出的路径更符合驾驶人的主观感受。
最后,构建损失函数,选择损失函数最小的路径作为最优路径。
结果表明,该方法能够在复杂场景下给出更合理的行车方案。
【总页数】4页(P161-163)
【作者】闫春来;徐聪;刘咏诗;潘常春;孙凯
【作者单位】齐鲁工业大学(山东省科学院)信息与自动化学院;上海交通大学北斗导航与位置服务上海市重点实验室
【正文语种】中文
【中图分类】TP242
【相关文献】
1.复杂场景下面向群体路径规划的改进人工蜂群算法
2.融合TangentBug与Dubins曲线的智能轮式车辆局部路径规划算法
3.智能车辆局部路径规划与跟踪控
制算法研究4.基于B样条算法的智能车辆局部避障路径规划5.面向复杂物流配送场景的车辆路径规划多任务辅助进化算法
因版权原因,仅展示原文概要,查看原文内容请购买。
智能交通系统中的车辆动态路径规划算法随着城市交通拥堵问题的日益严重,智能交通系统引起了广泛的关注和研究。
车辆动态路径规划是智能交通系统中的关键技术之一。
它通过分析路况信息和车辆需求,为车辆提供最优的路径方案,以提高交通效率,并减少车辆行驶时间和能源消耗。
本文将介绍智能交通系统中的车辆动态路径规划算法,重点讨论最短路径算法、最佳路径算法和实时路径算法。
最短路径算法是最基本的路径规划算法之一。
它通过计算路径长度来确定最短路径,即选择路径上的节点之间的最短距离。
最短路径算法在智能交通系统中具有广泛的应用,例如导航系统、快递配送系统等。
其中,迪杰斯特拉算法和弗洛伊德算法是两种常用的最短路径算法。
迪杰斯特拉算法是一种贪心算法,通过从起点开始,逐步选择当前最短路径,更新路径长度,直到到达目标节点。
该算法的时间复杂度为O(n^2),其中n为节点数。
弗洛伊德算法是一种动态规划算法,通过比较任意两个节点之间的路径长度,逐步更新最短路径,直到更新完所有节点的路径长度。
该算法的时间复杂度为O(n^3),其中n为节点数。
这两种算法都能有效地计算出车辆的最短路径,但在大规模数据下,弗洛伊德算法的效率较低。
除了最短路径算法,最佳路径算法也能满足特定的需求。
最佳路径算法不仅考虑路径长度,还考虑其他因素,如路况、车流量、工作时间等,以提供用户最佳的路径方案。
最佳路径算法通过使用启发式搜索算法、遗传算法等方法,综合多个因素来确定最佳路径。
例如,A*算法是一种基于启发式搜索的最佳路径算法,它通过对节点进行估值,通过选择估值最小的节点来搜索路径。
遗传算法是一种模拟进化过程的优化算法,通过生成多个个体,通过选择、交叉和变异等操作,逐步优化路径。
这些最佳路径算法能够更好地满足车辆的需求,提供更加智能和个性化的路径方案。
实时路径算法是在最短路径算法和最佳路径算法的基础上进行了进一步的改进。
实时路径算法通过实时获取和分析路况信息,根据实时交通状况进行路径规划。
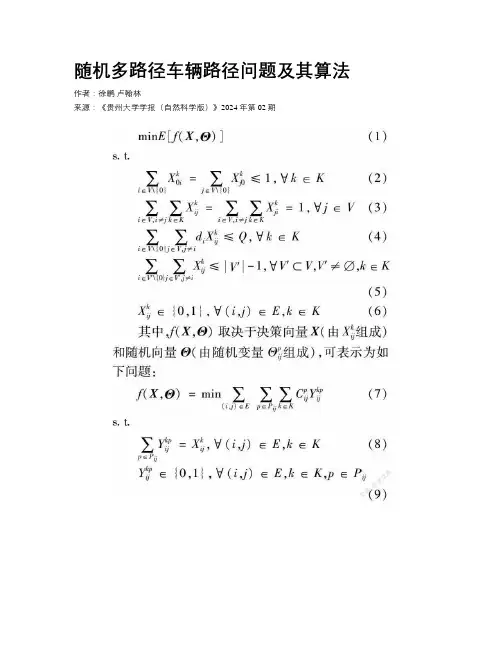
第41卷第2期贵州大学学报(自然科学版)Vol.41No.22024年 3月JournalofGuizhouUniversity(NaturalSciences)Mar.2024文章编号 1000 5269(2024)02 0060 07DOI:10.15958/j.cnki.gdxbzrb.2024.02.09随机多路径车辆路径问题及其算法徐 鹏,卢翰林(河海大学土木与交通学院,江苏南京210098)摘 要:为了更加契合现实的城市配送运作环境,本文对经典的车辆路径问题进行了新的拓展研究,考虑了任意两个物流节点之间存在多条路径且每条路径的通行成本不确定的情况,建立了随机多路径车辆路径问题(sto chasticmulti pathvehicleroutingproblem,SMP VRP)模型,并针对所研究的问题设计了具有较高求解效率的两阶段算法。
算法的第一阶段,采用具有约束的K means算法对客户进行分组,将SMP VRP问题转化为随机多路径旅行商问题(stochasticmulti pathtravelingsalesmanproblem,SMP TSP);算法的第二阶段,将SMP TSP问题先转化成等价的情景规划问题,再近似成确定型规划问题;通过对SMP TSP问题的求解,进而得到SMP VRP问题的解。
算例测试表明,相较于采用贪心策略的配送组织方法,本文所提出的两阶段算法可以降低7%左右的平均配送成本,并且表现出良好的稳定性,为物流配送车辆路径优化问题提供了新的研究思路,且具有较强的应用价值。
关键词:城市配送;车辆路径问题;随机多路径;两阶段算法;K means算法中图分类号:TP18;U492.22 文献标志码:A 近年来,以小批量、多频次、多品种、时效性强为主要特征的城市配送业务增长迅猛。
以快递业为例,根据国家邮政局统计,我国快递业务量从2012年的56 85亿件增长到2022年的1105 8亿件[1],十年间增长了近20倍。
随机多路径车辆路径问题及其算法作者:徐鹏卢翰林来源:《贵州大学学报(自然科学版)》2024年第02期文章编号10005269(2024)02006007DOI:ki.gdxbzrb.2024.02.09摘要:为了更加契合现实的城市配送运作环境,本文对经典的车辆路径问题进行了新的拓展研究,考虑了任意两个物流节点之间存在多条路径且每条路径的通行成本不确定的情况,建立了随机多路径车辆路径问题(stochastic multipath vehicle routing problem,SMPVRP)模型,并针对所研究的问题设计了具有较高求解效率的两阶段算法。
算法的第一阶段,采用具有约束的Kmeans算法对客户进行分组,将SMPVRP问题转化为随机多路径旅行商问题(stochastic multipath traveling salesman problem,SMPTSP);算法的第二阶段,将SMPTSP问题先转化成等价的情景规划问题,再近似成确定型规划问题;通过对SMPTSP问题的求解,进而得到SMPVRP问题的解。
算例测试表明,相较于采用贪心策略的配送组织方法,本文所提出的两阶段算法可以降低7%左右的平均配送成本,并且表现出良好的稳定性,为物流配送车辆路径优化问题提供了新的研究思路,且具有较强的应用价值。
关键词:城市配送;车辆路径问题;随机多路径;两阶段算法;Kmeans算法中图分类号:TP18;U492.22文献标志码:A近年来,以小批量、多频次、多品种、时效性强为主要特征的城市配送业务增长迅猛。
以快递业为例,根据国家邮政局统计,我国快递业务量从2012年的5685亿件增长到2022年的1 1058亿件[1],十年间增长了近20倍。
面对早已拥堵不堪的城市道路,规模庞大的城市配送业务让“最后一公里”[2]难题变得更加严峻。
因此,为城市配送业务提供核心解决方案的车辆路径问题(vehicle routing problem,VRP),受到物流研究人员和从业人员的关注[3]。