匀速转动内悬臂梁稳定性研究
- 格式:doc
- 大小:175.50 KB
- 文档页数:5

轴向运动简支—固支梁的横向振动和稳定性!TRANSVERSE VIBRATION AND STABI ITY OF AN A IA Y MOVING BEAM WITH PINNED AND FI ED ENDS李晓军!!陈立群(上海应用数学和力学研究所,上海大学力学系,上海200072)Ll Xiaojun CHEN Lioun(Shanghai Institute of Applied Mathematics and Mechanics,Department of Mechanics,Shanghai Uniuersity,Shanghai200072,China)摘要研究一端简支一端固支轴向运动梁的横向振动和稳定性。
提出在给定边界条件下确定一匀速运动梁固有频率和模态函数的方法。
当轴向运动速度在其常平均值附近作简谐波动时,应用多尺度法给出轴向变速运动梁参数共振时的不稳定条件。
用数值仿真说明相关参数对固有频率和不稳定边界的影响。
关键词轴向运动梁横向振动固有频率模态函数多尺度法稳定性中图分类号O326O343.9Abstract Vibration and stabiIity are investigated for an axiaIIy moving beam constrained by a pinned end and a fixed end.A scheme is proposed to derive naturaI freguencies and modaI functions of a beam under the given boundary conditions and moving axiaIIy at a constant speed.When the axiaI speed varies harmonicaIIy about a constant mean one,the method of muItipIe scaIes is appIied to the axiaIIy moving beam to determine the instabiIity boundary due to parametric resonance.NumericaI simuIations show the effects of reIated parameters on the naturaI freguencies and the instabiIity boundaries.Key words Axially moving beam;Transverse vibration;Natural freguency;Modal function;The method of multiple scales;StabilityCorresponding author:CHEN Lioun,E-mail:lgchen@,Tel:+86-21-66134972,Fax:+86-21-56553692 The project supported by the NationaI NaturaI Science Foundation of China(No.10472060),and the NaturaI Science Foundation of Shanghai City(No.04ZR14058)and Shanghai Leading DiscipIine Project(No.Y0103),China.Manuscript received20050113,in revised form20050308.1引言多种工程系统如传送带和带锯可以模型化为轴向运动梁,对于轴向运动梁横向振动的研究将有助于改进该类设备的设计与应用。

悬臂梁受力分析报告高一博2016.11.13西安理工大学机械与精密仪器工程学院摘要利用ANSYS对悬臂梁进行有限元静力学分析,得到悬臂梁的最大应力和挠度位移。
从而校验结构强度和尺寸定义,从而对结构进行最优化设计修正。
关键词:悬臂梁,变形分析,应力分析目录一.问题描述: (4)二.分析的目的和内容: (4)三.分析方案和有限元建模方法: (4)四.几何模型 (4)五.有限元模型 (4)六.计算结果: (5)七.结果合理性的讨论、分析 (8)八.结论 (8)参考文献 (8)一.问题描述:现有一悬臂梁,长500MM,一端固定,另外一端施加一个竖直向下的集中力200N。
其截面20MMX20MM的矩形,现在要分析该梁的在集中力作用下产生的位移,应力和局部应力。
二.分析的目的和内容:1.观察悬臂梁的变形情况;2.观察分析悬臂梁的应力变化;3.找出其最大变形和最大应力点,分析形成原因;三.分析方案和有限元建模方法:1.使用ANSYS-modeling-create-volumes-block建模,2.对梁进行材料定义,网格划分。
3.一端固定,另外一端施加一个向下的200N的力。
4.后处理中查看梁的应力和变形情况。
四.几何模型500X20X20的梁在在ANSYS中进行绘制.由于结构简单规则,无需简化。
五.有限元模型单元类型:solid brick8node45材料参数:弹性模量2e+11pa,泊松比0.3边界条件:一端固定,一端施加载荷载荷:F=200N划分网格后的悬臂梁模型六.计算结果:变形位移图等效应力图局部应力图七.结果合理性的讨论、分析1.位移分析:在变形位移图上,在约束端位移最小为零,受压端位移最大。
与实际结果一致。
2.应力分析:在应力图上,应力最大处在约束端,而最小的位于受压端,与变形图相对应。
通过材料力学计算可知约束端的所受弯矩最大。
两个结果印证无误。
3.局部应力分析:在局部应力图上,可以看出在固定端上表面存有较大的应力,且为拉应力,受压端直角尖处有最大应力,从形成原因上分析属于尖角处应力集中。


悬臂转动机械非线性振动分析0.前言火力发电公司悬臂转动机械很多,如:排粉风机、动叶可调的一次风机二级叶轮、送风机等,相关统计分析得悬臂机械振动故障,大多数是转子质量不平衡引起的。
设备振动的特点基频成分占90%以上,振动幅值及相位稳定。
现场悬臂机械振动也有另类情况。
本文介绍两个具有振动异常特征的事例。
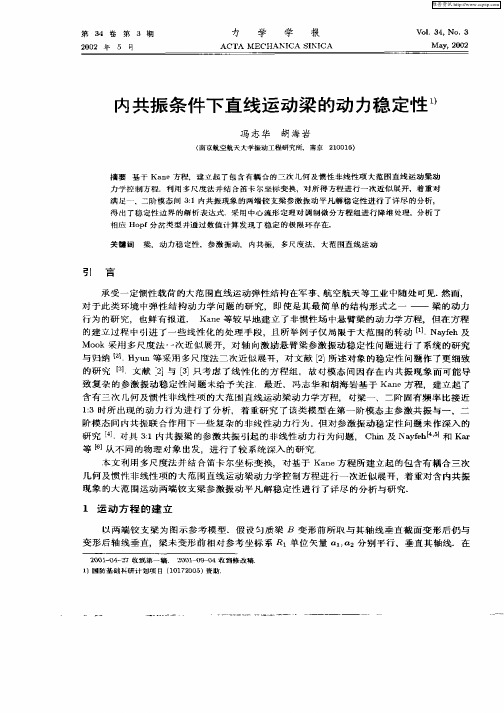
1.某排粉风机振动处理情况某发电公司锅炉排粉风机,系沈阳鼓风机厂生产的M6-31No19D型离心式,配沈阳电机厂的YKK450-4型异步电动机。
该排粉风机组支承轴承均为滚动轴承。
电机由A、B两个轴承支承,通过联轴器与风机转子连接,C、D两个轴承支承风机。
见轴系分布简图。
图1:轴系支承系统简图该风机小修中更换叶轮,小修后排粉风机启动,在工作转速1493 r/min下,D轴承振动最大,振动最大幅值186μm,通过对振动数据进行频谱分析得到:1X:89μm∠354° 2X:80μm,表明轴承振动成分中存在较大倍频分量,与基频振动量值相当。
探讨振动原因参考文献[1]、[2]认为,转子外伸端存在不平衡故障,振动特征应以基频为主,占90%以上分量。
依照文献[3]~[5]观点,初步分析风机应存在不对中缺陷,需要对该排粉风机转子中心进行检查。
通过检测发现联轴器对轮中心偏差较大,调整对轮中心数据均达检修装配规程要求指标,再次启动风机振动基本不变。
结合现场条件,对风机进行动平衡试验。
在排粉风机叶轮上配重500g,D轴承振动降低到45μm,1X:23μm∠323°2X:20μm,排粉风机设备振动达到合格水平。
2.某一次风机振动处理情况某发电公司#2炉B一次风机,系沈阳鼓风机厂生产的AST-1960/1400型双级动叶可调式,配上海电机厂有限公司的YKK630-4型异步电动机。
该一次风机组支承轴承均为滚动轴承。
电动机由A、B两个轴承支承,通过联轴器与风机转子连接,C、D两个轴承支承风机,见轴系分布简图。
图2:轴系支承系统简图2013年3月一次风机检修后。
悬臂梁的受力分析与结构优化吴鑫龙3136202062【摘要】悬臂梁不管是在工程设计还是在机械设计中都有着广泛的应用,其有着结构简单,经济实用等优点。
但受到其自身结构的限制,一般悬臂梁的力学性能和使用性能都会受到很大的限制。
本篇主要探究悬臂梁在使用中的受力情况并从材料力学的角度来对其进行优化设计,并对新设计悬臂梁进行分析。
【Abstract 】Cantilever whether in engineering or mechanical design have a wide range of applications, it has a simple structure, economical and practical advantages. But by its own structural limitations, the general cantilever mechanical properties and performance will be greatly limited. This thesis is focus on exploring the cantilever in use from the perspective of the forces and the mechanical design to be optimized., and analysis the new design cantilever .【关键词】悬臂梁受力设计【Keywords】cantilever force analysis optimization背景及意义悬臂梁是指梁的一端为不产生轴向、垂直位移和转动的固定支座,另一端为自由端(可以产生平行于轴向和垂直于轴向的力)。
在实际工程分析中,大部分实际工程受力部件都可以简化为悬臂梁。
但是悬臂梁的缺点在于它的受力性能不好,即使只是在悬臂梁末端施加一个较小的载荷,通过较长力臂的放大作用,也会对底部连接处产生一个很大的弯矩。
悬臂梁的受力分析与结构优化悬臂梁是一种常见的结构,由于其特殊的支持方式,受力分析和结构优化对于设计师来说是非常重要和关键的。
本文将详细介绍悬臂梁的受力分析和结构优化。
首先,我们需要了解悬臂梁的基本结构和受力情况。
悬臂梁由一个固定支座和一个悬挑段组成,其中,固定支座是悬挑段的唯一支撑点。
常见的悬臂梁结构包括悬臂梁、悬臂梁连接梁柱和榀架等。
悬臂梁的受力分析可以通过静力学的原理来进行。
在进行悬臂梁的受力分析时,可以采用以下步骤:1.确定受力类型:首先需要确定悬臂梁所受的外力类型,包括集中力、均布力以及倾覆力。
根据具体情况,可以分析受力的大小、方向和作用点位置。
2.绘制受力图:针对所确定的受力情况,绘制受力图可以帮助我们更加直观地了解悬臂梁的受力情况。
受力图包括受力箭头和标注力的大小、方向和作用点位置。
3.计算受力大小:利用受力图,可以通过应力平衡原理计算出悬臂梁各个部分的受力大小。
利用平衡方程,可以计算出悬臂梁在不同位置的剪力、弯矩和轴力。
4.分析受力状况:通过计算出的受力大小,可以分析悬臂梁的受力状况。
在分析过程中,需要注意各个受力点的正负号,以及受力的分布情况。
在进行悬臂梁的结构优化时,可以采用以下方法:1.材料选型:选择适当的材料是悬臂梁结构优化的重要因素之一、优先选择具有较高的强度和刚度的材料,以减小悬臂梁的自重;同时还要考虑材料的成本和可获得性。
2.梁型设计:根据实际需求,选择合适的梁型可以优化悬臂梁的结构。
常见的梁型包括矩形梁、圆形梁、槽式梁等,每种梁型具有不同的性能和应用范围。
3.截面设计:选择合适的悬臂梁截面形状和尺寸可以优化悬臂梁的结构性能。
通过计算悬臂梁的受力情况,可以确定截面的强度和刚度需求,然后选择合适的截面形状和尺寸。
4.强度验证:在进行结构优化后,需要进行强度验证。
通过对悬臂梁进行负荷测试或使用有限元分析方法,可以验证悬臂梁是否满足强度和刚度的要求。
如果不满足要求,需要对结构进行调整和优化。
悬臂梁振动参数测试实验悬臂梁是一种常见的结构,广泛应用于工程领域。
在实际应用中,悬臂梁的振动参数对结构的稳定性和性能有重要影响。
因此,进行悬臂梁振动参数测试实验具有重要意义。
悬臂梁的振动参数主要包括自然频率、阻尼比和模态形态等。
自然频率是指悬臂梁在无外界力作用下固有振动的频率。
阻尼比是描述悬臂梁振动衰减速度的参数。
模态形态是指悬臂梁不同振型下的振动特征。
悬臂梁的振动参数测试实验可以通过使用加速度传感器和激励源等测量设备进行。
实验流程如下:首先,确定悬臂梁的几何尺寸和材料参数。
将悬臂梁固定在实验平台上,并保证其支座位置与实际使用条件相同。
接下来,以悬臂梁的自然频率为目标进行实验。
采用激励源施加不同频率的激励信号,并通过加速度传感器测量相应的振动响应。
利用悬臂梁的振幅-频率响应曲线,可以得到悬臂梁的自然频率。
然后,以阻尼比为目标进行实验。
在悬臂梁上施加周期性激励信号,在加速度传感器的测量下获取悬臂梁的振动响应。
利用悬臂梁的振幅-时间曲线,可以计算出悬臂梁的阻尼比。
最后,以模态形态为目标进行实验。
通过在悬臂梁不同位置施加冲击或连续激励信号,可以观察到悬臂梁的振动模态。
利用高速摄像机或激光干涉仪等设备,可以记录下悬臂梁不同振型的形态,从而得到悬臂梁的模态形态。
实验完成后,可以对悬臂梁的振动参数进行分析和评价。
如果实测值与设计值或理论值相符,则说明实验结果准确可靠;如果存在较大偏差,则可能需要重新检查实验方法或设计参数。
总之,悬臂梁振动参数测试实验是一个关键的工程实验,可以用于评估和改进悬臂梁的振动性能。
通过合理设计实验方案和选用合适的测量设备,可以得到准确的振动参数,为悬臂梁的设计和应用提供有力支持。
匀速转动内悬臂梁稳定性研究
李涛 高卫民 洪善桃
(同济大学,汽车工程系,上海200092)
摘要: 本文采用了简化模型和连续体梁模型分析了匀速转动内悬臂梁的稳定性,指出了匀速转动内悬臂梁
动力柔化的原因在于梁的大范围平动。提出了匀速转动内悬臂梁的内转半径和外转半径的概念。指出匀速
转动内悬臂梁的内转半径和外转半径比值存在一定关系时,系统为一阶稳定。
柔性多体动力学的发展和现代航天器、机器人、车辆、机械和兵工等工程领域的发展紧
密联系的。自1988年以来,关于大范围转动引起连续体梁的动力刚化现象的研究已经有多
年的历史。但近年来研究表明,大范围运动的连续体梁存在着动力柔化现象,这尤其以大范
围匀速转动的内悬臂梁为突出。本文推导了同时进行大范围平动和转动的简化柔性梁以及连
续体梁的控制方程。以匀速转动内悬臂梁为例,说明了动力柔化产生的原因是大范围平动造
成的,并提出了内悬臂梁匀速转动的内转半径和外转半径的概念。
1、简化柔性梁模型
采用恰当的简化模型可以方便地揭示所研究问题的本质。在凯恩当年研究柔体大范围转
动对变形运动影响的时候,凯恩就曾经向研究者建议了一种说明传统建模方式缺陷的简化模
型(图4.1),并被学者采用发表在文献中[74],对该简化模型建模的修正非常清晰地揭示了
大范围转动惯性力对非线性结构作用的影响。其它研究者在研究过程中也采用过类似的简化
模型[67]。图4.1模型为单集中质量4自由度模型,其中单集中质量位于节点2处,四个自由
度分别为节点0的两个平动自由度0x、0y。杆01在绝对坐标系中的转角1,杆12相对于
杆01的转角。
图 1 凯恩简化柔性梁模型
1
l
A
2
1
A
1
2
l
0
1
2
在0x、0y为已知,1也为已知,变形为小量的情况下,得到的控制方程为:
21210210120120221222cossinsincoslllylxlylxlllmK (3)
显然,大范围转动和大范围平动对系统横向振动的影响是耦合的,不能简单地叠加,而
且大范围平动对于简化柔性梁振动特性的影响可能是刚化,也可能是柔化。
以内悬臂柔性梁为例,将对应于内悬臂梁的边界条件和初始条件为:
trxcos0
trysin0
t1
代入控制方程,可以得到:
20202212cossinltymltxlrl,2222lmK= (4)
通过分析方程(4),可以得到以下结论:
在将r称为内转半径,rl1称为外转半径的前提下,外回转半径大于0时,系统横向
振动处于刚化状态,反之,系统处于柔化状态。当2221llr,系统没有周期解,处
于发散状态。
通过前面的分析可以得出以下结论,大范围转动和平动对简化柔性梁横向振动的影响是
非线性耦合的,不能叠加。大范围平动会导致柔性梁出现动力柔化现象,简化内悬臂柔性梁
进行匀速转动的时候,由于柔性梁进行大范围平动,当外转半径小于0时,系统处在柔化状
态,外转半径大于0时系统处在刚化状态。因此,简化柔性内悬臂梁的动力稳定状态和该梁
的内转半径以及外转半径有关。
2、连续体梁模型
同时作大范围平动和转动的连续体梁模型如图2所示,设梁的总长为l。距离梁端为X
处的微元在局部坐标系中的位移为w,设梁端在绝对坐标系中的的位移为x0,y0,转角为0。
r
t
1
l
1
0
1
2
图2 连续体梁模型
则系统的控制方程变为:
lXyxAlXAwwAEIw000020224sincos
2
1
(5)
上述方程化为拟线性偏微分方程:
令tAlEIlylxlwvlX400,,,,=
可以得到无量纲化的控制方程:
1sincos12100202204vvvv- (6)
悬臂梁的边界条件为:
0,10,10,00,0v
v
v
v
(7)
将方程(6)和(7)的解表示为如下形式:
ev,
(8)
带入控制方程(6)可以得到
g2024-
(9)
其中1sincos12100202g
用乘以方程的两边并从0到1积分可以得到
X
w
102101022010221
0
2
101
0
dggddd-
根据边界条件(7):
102102201021022dddgd
(10)
显然当,
0==
时,
102102201022201022121dddd
根据Schwarz不等式可以得到:
01211021022dd
则0系统具有周期解,系统为无条件稳定,这对应大范围转动下的动力刚化现象。
如果令式(6)中cosr=、sinr=、00,
其中lRr,则对应于内悬臂梁旋转的条件:
202
1121rg
式(10)变为:
1021022010222010221121dddrd
(11)
取满足边界条件的一阶假设模态为:23464
1212423、1224122
则有:
31.264102234102dd
8.281224121022102dd
rdrdr59.371.211211212411211022231022
(12)
将(12)代入(11)得:
8.284.059.3201022rd
(13)
显然当91r时,系统始终保持稳定。这和文献[108]中的结论一致。
当91r时,系统存在临界转速,4.059.38.2820r=,当转速高于临界转速时,系统将不能
进行周期运动而发散。
91r的物理意义如图3,R 为系统的内转半径,9
1
r
时,即系统的内转半径小于内
悬臂梁的长度l的91时,无论系统的转速多大,系统外转半径l98所产生的刚化效应影响将
大于系统支座大范围转动所造成的内转柔化效应,系统将进行周期运动,系统整体处于刚化
状态。而当91r时,即系统的内转半径过大时,系统将产生柔化现象。
l
R
转动中心
图3 内悬臂梁的转动