工业机器人的轨迹规划实验报告
- 格式:pdf
- 大小:405.11 KB
- 文档页数:5
《6R工业机器人轨迹规划与控制研究》篇一一、引言随着工业自动化和智能制造的快速发展,6R(六轴)工业机器人在生产线上扮演着越来越重要的角色。
其高效、精准的作业能力极大地提高了生产效率与产品质量。
为了实现这一目标,对6R工业机器人轨迹规划与控制技术的研究变得至关重要。
本文将就6R工业机器人的轨迹规划与控制进行深入研究,以期为工业机器人技术的发展与应用提供参考。
二、6R工业机器人概述6R工业机器人,即具备六个旋转关节的机器人,其运动方式灵活多变,能够适应各种复杂的工作环境。
在制造业中,6R机器人广泛应用于装配、焊接、喷涂、搬运等工序,极大地提高了生产效率与产品质量。
三、轨迹规划研究(一)轨迹规划的重要性轨迹规划是机器人控制的关键技术之一,它决定了机器人在执行任务时的运动轨迹,从而直接影响作业效率与产品质量。
在6R工业机器人中,合理的轨迹规划能提高机器人的工作效率、减少能量消耗,并降低不必要的机械磨损。
(二)轨迹规划方法目前,常用的轨迹规划方法包括插补法、优化算法和智能算法等。
插补法通过在关键点之间插入适当的中间点,使机器人的运动更加平滑;优化算法则通过优化轨迹参数,使机器人在满足约束条件下达到最优轨迹;智能算法则利用人工智能技术,如神经网络、遗传算法等,实现复杂环境下的自适应轨迹规划。
四、控制技术研究(一)控制系统的结构6R工业机器人的控制系统通常采用分层结构,包括上层规划层、中层控制层和底层驱动层。
上层规划层负责任务规划与决策,中层控制层负责运动控制与协调,底层驱动层则负责机器人的具体运动执行。
(二)控制策略控制策略是机器人控制技术的核心,它决定了机器人在执行任务时的稳定性和精度。
常见的控制策略包括PID控制、模糊控制、神经网络控制等。
PID控制具有简单、可靠的优点,广泛应用于机器人控制;模糊控制则适用于复杂环境下的自适应控制;神经网络控制则能够根据机器人的实际运行情况,自动调整控制参数,提高机器人的作业效率与精度。
工业机器人的轨迹规划与运动控制算法研究工业机器人在现代制造业中发挥着重要的作用,它能够自动执行复杂的任务,提高生产效率和质量。
轨迹规划和运动控制算法是实现机器人自动化的关键技术,本文将对此进行研究和探讨。
一、轨迹规划轨迹规划是指确定机器人从起始位置到目标位置的路径,使得机器人能够在规定的约束条件下安全、高效地完成任务。
常见的轨迹规划方法包括规划点插值法、直线插值法、样条插值法等。
1. 规划点插值法规划点插值法是一种简单且常用的轨迹规划方法。
它将机器人的路径划分为若干离散的规划点,然后通过插值算法确定规划点之间的路径。
这种方法计算简便,但可能导致机器人移动时出现抖动或曲线过于锐利的问题。
2. 直线插值法直线插值法是指将机器人的路径划分为若干直线段,然后通过线性插值得到每个直线段上的点。
这种方法的优点是计算简单,路径平滑,适用于一些简单的轨迹规划问题。
3. 样条插值法样条插值法是一种基于曲线的轨迹规划方法,它能够生成更加平滑的路径。
通过使用样条曲线进行插值,可以得到平滑的机器人轨迹,提高机器人的运动控制性能。
样条插值法相对于前两种方法来说计算更加复杂,但更适用于一些复杂的轨迹规划问题。
二、运动控制算法运动控制算法是指机器人根据规划得到的路径执行运动时的控制方法。
常见的运动控制算法包括PID控制、模糊控制、自适应控制等。
1. PID控制PID控制是一种常用的控制方法,它通过调节比例、积分和微分三个参数来实现对机器人的控制。
PID控制具有结构简单、调节灵活等优点,适用于对机器人位置和速度进行控制。
2. 模糊控制模糊控制是一种基于模糊逻辑的控制方法,它可以处理非线性和模糊的控制问题。
模糊控制通过将输入和输出变量模糊化,并使用一系列的模糊规则进行控制决策,实现对机器人的运动控制。
3. 自适应控制自适应控制是一种能够根据外部环境变化自动调整控制参数的控制方法。
它通过建立机器人与环境的数学模型,利用自适应算法实时调整控制器参数,以适应不同的工作条件。
一、引言随着科技的飞速发展,机器人技术在我国得到了广泛的应用,特别是在工业自动化、服务业、医疗等领域。
为了提高机器人的工作效率和智能化水平,机器人轨迹设计成为机器人技术中的一个重要环节。
本次实训旨在通过实践操作,掌握机器人轨迹设计的基本原理和方法,提高实际操作能力。
二、实训目的1. 理解机器人轨迹设计的基本概念和原理;2. 掌握机器人轨迹设计的基本方法;3. 培养学生独立思考和解决问题的能力;4. 提高学生的实践操作能力。
三、实训内容1. 机器人轨迹设计的基本概念机器人轨迹设计是指根据机器人的运动学和动力学特性,确定机器人在执行任务过程中的运动路径。
轨迹设计的主要内容包括:运动学分析、动力学分析、运动规划、路径优化等。
2. 机器人轨迹设计的基本方法(1)运动学分析:根据机器人的运动学模型,分析机器人各个关节的运动关系,确定机器人各个关节的运动轨迹。
(2)动力学分析:根据机器人的动力学模型,分析机器人各个关节的受力情况,确定机器人各个关节的运动加速度。
(3)运动规划:根据运动学分析和动力学分析的结果,规划机器人各个关节的运动轨迹,使机器人能够按照预期路径运动。
(4)路径优化:通过优化算法,对机器人运动轨迹进行优化,提高机器人工作效率,降低能耗。
3. 机器人轨迹设计实例本次实训以UR10机器人为例,进行轨迹设计。
UR10是一款6自由度的工业机器人,具有高精度、高速度、高可靠性等特点。
(1)运动学分析:首先,根据UR10的运动学模型,分析各个关节的运动关系,确定各个关节的运动轨迹。
(2)动力学分析:然后,根据UR10的动力学模型,分析各个关节的受力情况,确定各个关节的运动加速度。
(3)运动规划:根据运动学分析和动力学分析的结果,规划UR10各个关节的运动轨迹,使UR10能够按照预期路径运动。
(4)路径优化:最后,通过优化算法,对UR10的运动轨迹进行优化,提高UR10的工作效率,降低能耗。
四、实训过程1. 理论学习:学习机器人轨迹设计的基本概念、原理和方法,了解UR10机器人的运动学模型和动力学模型。
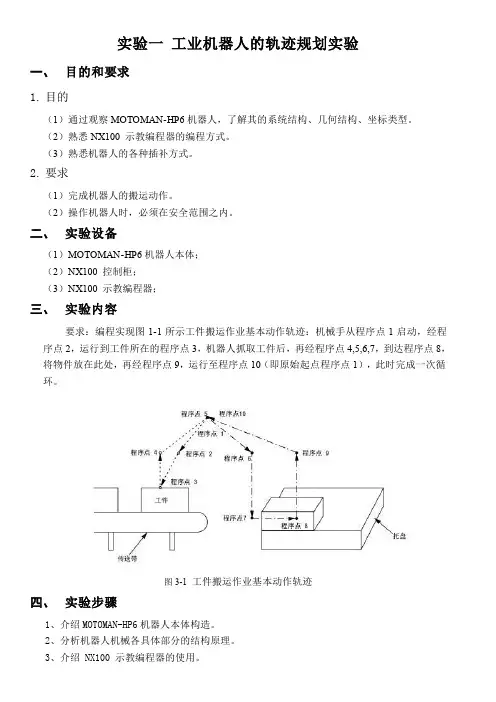
第1篇一、实验目的1. 理解轨迹编程的基本概念和原理。
2. 掌握轨迹编程的常用方法和技巧。
3. 培养编程思维和实际操作能力。
4. 分析轨迹编程在机器人、自动化等领域中的应用。
二、实验环境1. 操作系统:Windows 102. 编程语言:Python3.83. 轨迹规划库:OpenCV4.5.14. 机器人平台:某型号机器人(如:UR5)三、实验内容1. 轨迹编程基本概念2. 轨迹规划算法3. 轨迹生成与优化4. 轨迹仿真与测试5. 轨迹编程在实际应用中的案例分析四、实验步骤1. 熟悉轨迹编程基本概念,包括直线轨迹、曲线轨迹、圆弧轨迹等。
2. 学习轨迹规划算法,如:Dijkstra算法、A算法、RRT算法等。
3. 利用OpenCV库进行轨迹生成与优化,实现机器人从起点到终点的路径规划。
4. 使用仿真软件(如:MATLAB、ROS等)对轨迹进行仿真,观察轨迹效果。
5. 将轨迹编程应用于实际案例,如:机器人路径规划、自动化生产线路径优化等。
五、实验结果与分析1. 轨迹编程基本概念- 实验结果:成功理解轨迹编程的基本概念,包括直线轨迹、曲线轨迹、圆弧轨迹等。
- 分析:通过查阅资料和实际操作,掌握了轨迹编程的基本概念,为后续实验奠定了基础。
2. 轨迹规划算法- 实验结果:掌握了Dijkstra算法、A算法、RRT算法等轨迹规划算法。
- 分析:通过编程实现这些算法,了解了它们在不同场景下的适用性和优缺点。
3. 轨迹生成与优化- 实验结果:成功使用OpenCV库生成和优化轨迹。
- 分析:通过实际操作,掌握了OpenCV库在轨迹生成与优化方面的应用,提高了编程能力。
4. 轨迹仿真与测试- 实验结果:在仿真软件中对轨迹进行仿真,观察轨迹效果。
- 分析:通过仿真,验证了轨迹的可行性和有效性,为实际应用提供了依据。
5. 轨迹编程在实际应用中的案例分析- 实验结果:将轨迹编程应用于实际案例,如:机器人路径规划、自动化生产线路径优化等。
《6R工业机器人轨迹规划与控制研究》篇一一、引言随着制造业的快速发展,工业机器人作为智能制造的重要设备,其在生产线上的应用日益广泛。
6R工业机器人以其灵活性和高效性在各种领域得到了广泛的应用。
其中,轨迹规划与控制技术作为机器人的核心研究内容,对于提高机器人的工作效率、运动精度和稳定性具有重要意义。
本文将重点研究6R工业机器人的轨迹规划与控制技术,探讨其相关理论、方法及实际应用。
二、6R工业机器人概述6R工业机器人是一种具有六个旋转关节的机器人,能够在三维空间内进行复杂的运动。
其运动学模型、动力学特性和控制策略是机器人研究的基础。
6R工业机器人具有高精度、高速度和高负载等特点,广泛应用于汽车制造、电子装配、食品包装等领域。
三、轨迹规划方法研究轨迹规划是6R工业机器人的重要研究内容,它决定了机器人的运动路径和速度。
本文将介绍几种常见的轨迹规划方法:1. 插补法:通过在关键点之间插入中间点,生成平滑的轨迹。
该方法简单易行,适用于对轨迹精度要求不高的场合。
2. 优化法:以机器人的运动学模型为基础,通过优化算法求解最优轨迹。
该方法可以提高机器人的运动精度和效率,但计算量较大。
3. 智能算法:如遗传算法、神经网络等,通过学习的方式获取最优轨迹。
该方法具有较高的自适应性和学习能力,但需要大量的训练数据。
四、控制策略研究控制策略是6R工业机器人的核心,它决定了机器人的运动稳定性和精度。
本文将介绍几种常见的控制策略:1. 经典控制策略:如PID控制、模糊控制等,通过设定阈值和规则来控制机器人的运动。
2. 现代控制策略:如自适应控制、鲁棒控制等,根据机器人的实际运动情况调整控制参数,提高机器人的适应性和稳定性。
3. 智能控制策略:如基于深度学习的控制策略,通过学习机器人的运动数据来优化控制策略,提高机器人的运动精度和效率。
五、实际应用与展望6R工业机器人的轨迹规划与控制在制造业中得到了广泛的应用。
通过合理的轨迹规划和控制策略,可以提高机器人的工作效率、运动精度和稳定性,从而降低生产成本、提高产品质量。
一、引言随着科技的飞速发展,工业自动化逐渐成为制造业的重要趋势。
机器人作为工业自动化的重要载体,其应用领域越来越广泛。
地轨作为机器人运动的基础设施,对于提高机器人作业效率、降低生产成本具有重要意义。
为了更好地了解机器人地轨的设计、安装与调试,我们组织了一次机器人地轨实训。
以下是实训报告。
二、实训目的1. 熟悉机器人地轨的基本原理和组成。
2. 掌握机器人地轨的设计、安装与调试方法。
3. 培养团队协作能力,提高动手实践能力。
三、实训内容1. 机器人地轨基础知识(1)地轨的类型:直线地轨、弯曲地轨、转盘地轨等。
(2)地轨的组成:地轨本体、连接件、导向件、滚轮等。
(3)地轨的材料:不锈钢、铝合金、工程塑料等。
2. 机器人地轨设计(1)地轨长度、宽度和高度的设计。
(2)地轨形状和弯曲半径的设计。
(3)地轨与机器人的连接方式设计。
3. 机器人地轨安装(1)地轨基础的施工。
(2)地轨与机器人的连接安装。
(3)地轨与其它辅助设备的连接安装。
4. 机器人地轨调试(1)地轨运动平稳性测试。
(2)地轨导向精度测试。
(3)地轨与机器人配合度测试。
四、实训过程1. 理论学习(1)通过查阅资料、教师讲解,了解机器人地轨的基本原理、组成和设计方法。
(2)学习地轨安装与调试的相关知识和技能。
2. 实践操作(1)根据设计要求,绘制地轨施工图。
(2)组织施工队伍进行地轨基础施工。
(3)进行地轨安装,包括地轨本体、连接件、导向件、滚轮等。
(4)调试地轨,测试地轨运动平稳性、导向精度和与机器人的配合度。
3. 团队协作(1)明确各成员职责,确保项目顺利进行。
(2)加强沟通,协调解决施工过程中遇到的问题。
五、实训结果1. 成功完成地轨设计、安装与调试。
2. 机器人地轨运动平稳,导向精度高,与机器人配合良好。
3. 培养了团队协作能力和动手实践能力。
六、实训总结1. 机器人地轨在工业自动化领域具有重要作用,掌握地轨设计、安装与调试方法对于提高生产效率具有重要意义。
三一文库()〔工业机器人实验报告 1300字〕
工业机器人实验指导书
田军营韩建海
河南科技大学机电工程学院
MOOMA工业机器人平面轨迹控制实验
班级:姓名:组别:实验成绩:
一、实验学时:2学时
二、实验目的:
学习并掌握MOOMA工业机器人在不同坐标系里的平面运动轨迹控制原理和控制方法。
三、实验原理:
通过使用MOOMA工业机器人的示教编程器,在机器人的不同坐标系中控制机器人工具坐标系的平面运动。
四、实验设备:
一台日本安川电气生产的MOOMA工业机器人。
五、主要实验模块及编程:
1、说明机器人示教编程中的坐标系选择方法,并通过实验说明不同坐标系中坐标轴的控制。
2、说明示教控制机器人在选择坐标系后平面运动控制的便利性和在不同坐标系中接近平面一个点的共性。
3、选择合适的坐标系,控制机器人在平面上走出一个三角形(说明理由和方法)。
□□
六、实验思考题:
1、说明在选择坐标系后,在平面上画直线、圆弧的方法?
2、说明构建机器人平面运动轨迹的方法(通过各种轨迹路线的运动加以说明)?
3、画图说明,在选择坐标系后,当机器人的实际运动是平面上的一个长方形时,你的实际操作可能是什么?(无论采用什么方法,只要能说清楚问题即可)
4、说明在选择坐标系后,你编程控制机器人运动过程中机器人没有发生干涉,机器人在这个过程中形成的程序控制下的运动会发生干涉吗?为什么?
5、说明在选择坐标系后,你在机器人平面运动控制中的体会。
工业机器人动作规划算法实验报告一、实验目的随着工业自动化的不断发展,工业机器人在生产线上的应用越来越广泛。
为了提高工业机器人的工作效率和精度,需要对其动作规划算法进行深入研究和优化。
本次实验的目的是通过对不同动作规划算法的比较和分析,找到一种适合工业机器人的高效、精确的动作规划算法,并对其性能进行评估。
二、实验设备和环境(一)实验设备1、工业机器人本体:选用了_____品牌的六自由度工业机器人,型号为_____。
2、控制器:采用了与机器人本体配套的控制器,型号为_____。
3、传感器:包括位置传感器、力传感器等,用于获取机器人的运动状态和环境信息。
4、计算机:用于运行机器人控制软件和算法程序,配置为_____。
(二)实验环境1、实验场地:在一个面积为_____平方米的实验室中进行实验,场地内配备了必要的安全防护设施。
2、工作对象:选择了一些常见的工业零部件,如螺栓、螺母、齿轮等,作为机器人的操作对象。
三、实验原理和算法(一)动作规划原理工业机器人的动作规划是指根据给定的任务目标和约束条件,确定机器人从初始状态到目标状态的运动路径和动作序列。
动作规划需要考虑机器人的运动学和动力学特性、工作空间的限制、避障要求以及任务的时间和精度要求等因素。
(二)常见动作规划算法1、基于路径点的规划算法这种算法通过预先设定一系列的路径点,然后让机器人依次经过这些路径点来完成任务。
路径点的确定通常需要人工干预,算法的灵活性较差,但计算简单,适用于一些简单的任务。
2、基于样条曲线的规划算法利用样条曲线来描述机器人的运动轨迹,如三次样条曲线、五次样条曲线等。
这种算法可以生成平滑的运动轨迹,提高机器人的运动精度和稳定性,但计算复杂度较高。
3、基于人工势场法的规划算法将机器人的工作空间视为一个势场,目标点产生吸引力,障碍物产生排斥力,机器人在势场的作用下运动。
这种算法可以实现实时的避障规划,但容易陷入局部最优解。
4、基于随机采样的规划算法通过在工作空间中随机采样生成大量的路径点,然后从中筛选出可行的路径。
《工业机器人轨迹规划算法的研究与实现》一、引言随着工业自动化技术的飞速发展,工业机器人已成为现代制造业不可或缺的重要工具。
轨迹规划作为机器人运动控制的核心技术之一,对于提高机器人的工作效率、精度和灵活性具有重要意义。
本文旨在研究工业机器人轨迹规划算法,探讨其实现方法,并分析其在工业领域的应用前景。
二、工业机器人轨迹规划算法概述工业机器人轨迹规划是指根据任务需求,为机器人规划出一条从起始点到目标点的最优路径。
这一过程涉及到机器人的运动学、动力学以及环境因素等多方面因素。
常见的轨迹规划算法包括插补法、优化法、学习法等。
1. 插补法插补法是一种基于数学模型的轨迹规划方法,通过在关键点之间插入适当的中间点,形成平滑的轨迹。
插补法具有计算简单、实时性好的特点,适用于对精度要求不高的场景。
2. 优化法优化法是一种以优化目标函数为手段的轨迹规划方法。
它通过考虑机器人的运动学、动力学约束以及任务需求,建立优化模型,并采用相应的优化算法求解。
优化法可以获得更优的轨迹,提高机器人的工作效率和精度。
3. 学习法学习法是一种基于机器学习技术的轨迹规划方法。
它通过学习历史数据和经验知识,自主生成适应新任务的轨迹。
学习法具有较高的自适应性和智能性,适用于复杂多变的工业环境。
三、工业机器人轨迹规划算法的实现实现工业机器人轨迹规划算法需要综合考虑机器人的运动学模型、动力学模型以及任务需求等因素。
下面以优化法为例,介绍轨迹规划算法的实现过程。
1. 建立优化模型根据任务需求和机器人的运动学、动力学约束,建立优化模型。
优化模型通常包括目标函数和约束条件两部分。
目标函数用于描述轨迹的优劣,如时间最短、能耗最低等;约束条件用于描述机器人的运动学、动力学约束以及安全要求等。
2. 选择优化算法根据优化模型的特点和需求,选择合适的优化算法进行求解。
常用的优化算法包括梯度下降法、遗传算法、模拟退火算法等。
在选择优化算法时,需要考虑算法的收敛速度、求解精度以及计算复杂度等因素。
《6R工业机器人轨迹规划与控制研究》篇一一、引言随着科技的快速发展和制造业的不断升级,工业机器人作为智能生产的重要部分,其在制造流程中的应用逐渐成为业界研究的热点。
尤其是6R(六个旋转轴)工业机器人,其多关节的灵活性和高精度的运动控制能力,使得它在装配、焊接、搬运等复杂任务中发挥着重要作用。
本文旨在研究6R工业机器人的轨迹规划与控制技术,以提高其工作效率和作业精度。
二、6R工业机器人概述6R工业机器人,指的是具有六个旋转轴的工业机器人,具有高度灵活性和高精度的工作能力。
它能够在复杂的作业环境中进行精准的定位和操作,是实现自动化、智能化生产的关键设备。
其工作原理是通过电机驱动各个关节的旋转,从而实现机器人的运动。
三、轨迹规划轨迹规划是工业机器人作业过程中的重要环节,它决定了机器人运动的速度、加速度以及位置等信息。
一个好的轨迹规划可以提高机器人的工作效率,同时也可以保证作业的精度和稳定性。
对于6R工业机器人而言,轨迹规划主要包括以下步骤:1. 任务分析:根据作业需求,分析机器人的运动轨迹和姿态变化。
2. 路径规划:根据任务分析结果,确定机器人的运动路径。
3. 速度与加速度规划:在路径规划的基础上,进行速度和加速度的规划,以实现平滑的运功过程。
4. 优化:通过优化算法对轨迹进行优化,以减小运动过程中的能量消耗和机械磨损。
四、控制策略控制策略是工业机器人实现精准运动的关键。
对于6R工业机器人而言,其控制策略主要包括以下方面:1. 运动学控制:通过建立机器人的运动学模型,实现精确的位置和姿态控制。
2. 动力学控制:根据机器人的动力学特性,进行速度和力的控制,以保证机器人在运动过程中的稳定性和安全性。
3. 智能控制:通过引入人工智能技术,实现机器人的自主学习和决策能力,提高机器人的智能水平和工作效率。
五、实验与分析为了验证本文提出的轨迹规划与控制策略的有效性,我们进行了相关实验。
实验结果表明,经过优化后的轨迹规划能够显著提高6R工业机器人的工作效率和作业精度。
《工业机器人轨迹规划算法的研究与实现》一、引言随着工业自动化技术的快速发展,工业机器人已成为现代制造业不可或缺的一部分。
轨迹规划作为机器人运动控制的核心技术之一,对于提高机器人的工作效率、精度和稳定性具有重要意义。
本文将针对工业机器人轨迹规划算法进行研究与实现,旨在为工业机器人的应用提供理论支持和实用方法。
二、工业机器人轨迹规划概述工业机器人轨迹规划是指根据机器人的工作任务和要求,制定出一条从起始位置到目标位置的合理路径。
该路径应满足机器人的运动学和动力学约束,同时尽可能提高工作效率和精度。
轨迹规划算法是机器人运动控制的核心,其优劣直接影响到机器人的性能表现。
三、常见的工业机器人轨迹规划算法1. 直线插补法:该方法将目标位置与起始位置之间的路径近似为直线,通过计算直线上的离散点来规划机器人的运动轨迹。
该方法简单易行,但精度较低。
2. 圆弧插补法:该方法利用圆弧来逼近目标位置与起始位置之间的路径,提高了轨迹的平滑性和精度。
但该方法对机器人的运动学约束考虑不足,可能导致实际运动中产生较大的误差。
3. 优化算法:包括遗传算法、蚁群算法、粒子群算法等,通过寻找最优解来规划机器人的运动轨迹。
这些算法可以充分考虑机器人的运动学和动力学约束,得到较为理想的轨迹。
但计算量大,实现难度较高。
四、本研究采用的轨迹规划算法本研究采用一种基于遗传算法的轨迹规划方法。
该方法首先建立机器人的运动学模型和动力学模型,然后根据工作任务和要求,设定合理的评价函数。
通过遗传算法在解空间中搜索最优解,得到机器人的最佳运动轨迹。
该方法可以充分考虑机器人的运动学和动力学约束,提高轨迹的精度和平滑性。
五、算法实现1. 建立机器人运动学模型和动力学模型:根据机器人的结构和工作环境,建立精确的运动学模型和动力学模型。
2. 设定评价函数:根据工作任务和要求,设定合理的评价函数,包括路径长度、运动时间、能量消耗等指标。
3. 遗传算法搜索最优解:采用遗传算法在解空间中搜索最优解,得到机器人的最佳运动轨迹。
工业机器人时间最优轨迹规划仿真研究1. 引言1.1 研究背景工业机器人在现代生产中扮演着越来越重要的角色,其高效、精准的运动控制能力使得生产线更加自动化和灵活化。
而工业机器人在执行任务时需要遵循一定的轨迹规划,以确保其运动路径具有最佳性能,如快速、平稳、节省能源等。
时间最优轨迹规划是工业机器人领域的热点问题之一,通过寻找机器人在规定时间内能够完成任务的最佳运动路径,可以提高生产效率,降低成本。
由于受制约于机器人本身的动力学特性、环境约束等因素,时间最优轨迹规划并非是一项简单的任务。
对工业机器人时间最优轨迹规划进行研究具有十分重要的意义。
通过深入研究和探索,可以为工业机器人的运动控制提供更科学、更高效的方法,提升生产效率,降低生产成本,提高产品质量。
随着人工智能、物联网等新技术的不断发展和应用,使得工业机器人的智能化和自适应性也呈现出新的发展方向。
借助于仿真技术对工业机器人的时间最优轨迹规划进行研究,将为工业机器人的智能化发展提供有力的支持和保障。
1.2 研究意义工业机器人在现代生产制造中扮演着越来越重要的角色,其高效、精确的运动能力为企业的生产效率和产品质量提供了有力支持。
而工业机器人的时间最优轨迹规划则是保证其运动效率和稳定性的重要技术之一。
时间最优轨迹规划不仅可以使工业机器人在执行任务过程中更加高效地移动,减少能源消耗,还可以提高机器人的工作精度和生产效率,从而为生产制造企业节约成本,提高竞争力。
时间最优轨迹规划还可以减少机器人在运动过程中的损耗,延长其使用寿命,降低维护成本,为企业创造更大的经济效益。
研究工业机器人时间最优轨迹规划具有重要的理论价值和实际意义。
通过深入探讨和研究,可以不断提升工业机器人的运动性能和智能化水平,推动工业机器人技术的发展和应用,促进现代制造业的转型升级,为实现智能制造和工业4.0提供强有力的支持。
2. 正文2.1 工业机器人轨迹规划概述工业机器人轨迹规划是指为工业机器人制定最佳路径以实现任务目标的过程。
工业机器人的最优时间与最优能量轨迹规划一、本文概述Overview of this article随着科技的飞速发展和工业自动化的不断推进,工业机器人已成为现代制造业中不可或缺的重要工具。
其中,工业机器人的轨迹规划问题成为了研究的关键点之一。
轨迹规划不仅决定了机器人的运动路径,更直接关系到机器人的工作效率、能源消耗以及使用寿命。
因此,如何实现工业机器人的最优时间与最优能量轨迹规划,成为了当前研究的热点和难点。
With the rapid development of technology and the continuous advancement of industrial automation, industrial robots have become an indispensable and important tool in modern manufacturing. Among them, the trajectory planning problem of industrial robots has become one of the key points of research. Trajectory planning not only determines the motion path of a robot, but also directly affects its work efficiency, energy consumption, and service life. Therefore, how to achieve optimal time and energy trajectory planning for industrialrobots has become a hot and difficult research topic.本文旨在深入探讨工业机器人的最优时间与最优能量轨迹规划问题,分析现有方法的优缺点,并提出一种更加高效、节能的轨迹规划方法。
6R工业机器人运动仿真与轨迹规划中期报告一、研究背景和意义随着现代工业的不断发展,工业机器人越来越受到重视,已成为工业自动化的重要组成部分。
而工业机器人的运动仿真和轨迹规划则是机器人控制系统设计的重要环节。
在机器人运动控制中,对产生的轨迹进行规划并控制机器人运动,实现机器人在空间中高精度的运动,是机器人控制的核心问题。
因此,针对工业机器人运动仿真和轨迹规划,进行相关研究和开发具有重要的理论和应用价值。
二、研究内容和方法本文的研究内容主要包括6R工业机器人运动仿真和轨迹规划。
首先,根据工业机器人的动力学模型,建立6R机器人的运动学模型,并采用MATLAB工具箱对模型进行数值计算和仿真,验证模型的正确性。
其次,针对机器人的轨迹规划问题,基于基于贝塞尔曲线的轨迹规划算法,结合机器人的工作空间和其他约束条件,对机器人的轨迹进行规划和优化。
最后,针对机器人的运动控制问题,探讨机器人的电机控制、力矩控制和PID控制等问题,从而实现机器人运动的高精度和稳定性。
三、研究进展和成果目前,我们已完成了6R工业机器人的动力学模型的建立,验证了模型的正确性。
同时,我们也初步探讨了6R机器人的轨迹规划和优化方法。
下一步,我们将继续深入研究机器人的轨迹规划和优化算法,探讨机器人的运动控制问题,并对结果进行仿真和实验验证,以取得更加实用和可靠的方法和技术。
四、存在的问题和未来展望在研究过程中,我们也遇到了一些问题,比如模型的精度不够高、算法的复杂性等等。
在未来的研究工作中,我们将继续优化模型和算法,并实践验证,以提高研究结果的可靠性和实用性。
同时,我们也将探讨机器人运动仿真和轨迹规划在其他领域的应用,以进一步扩展研究范围和应用前景。
《6R工业机器人轨迹规划与控制研究》篇一一、引言随着现代工业自动化水平的不断提升,6R工业机器人在制造领域中的应用日益广泛。
作为能够进行多轴协同运动的重要工具,6R工业机器人能够实现复杂的工艺操作和高效的自动化生产。
其中,轨迹规划和控制系统作为机器人的核心技术,直接决定了其工作性能和效率。
本文旨在研究6R工业机器人的轨迹规划与控制方法,以期提升机器人的运动精度和效率。
二、6R工业机器人概述6R工业机器人是一种多关节机器人,具有六个可独立控制的旋转轴。
其运动灵活,能够适应各种复杂的作业环境。
在制造业中,6R工业机器人广泛应用于装配、焊接、喷涂、搬运等工艺流程中,具有极高的自动化和智能化水平。
三、轨迹规划研究轨迹规划是6R工业机器人控制的关键技术之一,其目的是根据机器人的工作任务和要求,规划出最优的路径和速度曲线。
轨迹规划的优劣直接影响到机器人的工作效率和精度。
(一)轨迹规划方法目前,常用的轨迹规划方法包括插值法和优化法。
插值法通过已知的起点和终点信息,利用插值函数生成中间路径;优化法则是在满足约束条件下,通过优化算法寻找最优路径。
在实际应用中,根据具体任务需求选择合适的轨迹规划方法。
(二)轨迹规划算法针对6R工业机器人,常用的轨迹规划算法包括多项式插值法、梯形速度规划法、S型曲线速度规划法等。
这些算法具有不同的特点和适用范围,需要根据具体任务要求进行选择。
例如,S型曲线速度规划法能够使机器人以平滑的速度变化进行运动,适用于对速度变化要求较高的任务。
四、控制策略研究控制策略是6R工业机器人实现精确运动的关键,直接影响到机器人的工作性能和效率。
(一)控制方法目前,常用的控制方法包括经典控制方法和现代控制方法。
经典控制方法如PID控制、模糊控制等,具有简单易实现的特点;现代控制方法如神经网络控制、自适应控制等,具有较高的控制精度和鲁棒性。
在实际应用中,根据具体需求选择合适的控制方法。
(二)控制器设计控制器是机器人的“大脑”,负责发出指令控制机器人的运动。
工业机器人的轨迹规划与控制方法研究工业机器人作为现代制造业中非常重要的设备之一,广泛应用于不同的生产领域。
为了实现高效的生产和精确控制,工业机器人的轨迹规划与控制方法成为研究的热点。
本文将就工业机器人的轨迹规划和控制方法进行探讨。
一、轨迹规划方法工业机器人的轨迹规划是指通过对机器人的运动轨迹进行优化设计,实现灵活高效的运动。
常见的轨迹规划方法有直线轨迹规划、圆弧轨迹规划和样条曲线轨迹规划等。
直线轨迹规划是指机器人按照直线路径移动的方法。
这种方法简单直接,适用于一些直线型的加工任务。
但在某些情况下,直线轨迹规划缺乏灵活性,不能满足复杂加工任务的要求。
圆弧轨迹规划是指机器人按照圆弧路径移动的方法。
这种方法可以在机器人的运动过程中实现曲线的变化,提高机器人的运动灵活性。
但圆弧轨迹规划存在圆弧半径选择和切换问题,需要对机器人的运动空间进行规划和优化。
样条曲线轨迹规划是一种更加灵活和精细的方法。
通过将机器人的运动轨迹划分为多段曲线,可以实现更加复杂的运动规划。
此外,样条曲线轨迹规划可以实现光顺的路径转变和加工过程,提高机器人的运动效果和精度。
二、控制方法工业机器人的控制是指对机器人的姿态、速度和力矩等参数进行调整和控制,以实现精确的加工和运动。
常见的控制方法有位置控制、力控制和力/位置控制等。
位置控制是指通过控制机器人的关节位置来实现对机器人运动的控制。
这种控制方法简单易行,但在一些复杂的加工任务中,只依靠位置控制难以满足精度和稳定性的要求。
力控制是指通过对机器人施加外力来实现对机器人运动的控制。
这种控制方法用于需要对加工件施加力矩的工艺过程,可以实现对力矩的高精度控制。
但力控制方法对机器人和加工环境的刚性要求较高,应用范围有限。
力/位置控制是将位置控制和力控制方法结合起来的一种综合控制方法。
通过同时对机器人的位置和外力进行控制,可以实现更加灵活和精确的加工过程。
力/位置控制方法适用于大部分工业机器人的控制需求,具有较好的适应性和灵活性。