转子动力学课件第1次课 共27页PPT资料
- 格式:ppt
- 大小:528.00 KB
- 文档页数:27
转子动力学是固体力学的一个分支。
本文主要研究转子支承系统在旋转状态下的振动,平衡和稳定性,特别是在接近或超过临界转速的情况下转子的横向振动。
转子是涡轮机,电动机和其他旋转机械的主要旋转部件。
200多年来,工程和科学界一直关注转子振动。
w.j.m. 1869年英格兰的兰金(Rankin)和1889年法国的拉瓦尔(c.g.p.de Laval)对挠性轴的测试是研究此问题的先驱。
随着现代工业的发展,高速细长转子逐渐出现。
由于它们通常在柔性状态下工作,因此它们的振动和稳定性变得越来越重要。
转子动力学的主要研究内容如下:①临界速度由于制造误差,转子每个微小部分的质心与旋转轴略有偏离。
当转子旋转时,由上述偏差引起的离心力将使转子产生横向振动。
在某些速度(称为临界速度)下,这种振动似乎非常强烈。
为了确保机器不会在工作速度范围内产生共振,临界速度应适当偏离工作速度,例如大于10%。
临界速度与转子的弹性和质量分布有关。
对于具有有限集总质量的离散旋转系统,临界速度的数量等于集总质量的数量;对于具有连续质量分布的弹性旋转系统,临界速度是无限的。
传递矩阵法是计算大型转子支撑系统临界转速的最常用数值方法。
要点是:首先,将转子分成几个部分,每个部分左右两端的四个部分参数(挠度,挠度角,弯矩和剪切力)之间的关系可以通过传递来描述。
该部分的矩阵。
以此方式,可以获得系统的左端和右端的横截面参数之间的总传递矩阵。
然后,根据边界条件和自然振动中非零解的条件,通过试错法求出各阶的临界速度,得到相应的振动模式。
②通过临界速度的状态通常,转子以可变速度通过临界速度,因此通过临界速度的状态是不稳定的。
与以临界速度旋转时的静止状态不同,有两个方面:一是振幅的最大值小于静止状态的振幅,速度越大,振幅的最大值越小。
另一个是振幅的最大值不会在像静止状态那样的临界速度下出现。
在不稳定状态下,频率转换干扰力作用在转子上,这使分析变得困难。
为了解决这种问题,在数值计算或非线性振动理论中必须使用渐近法或级数展开法。
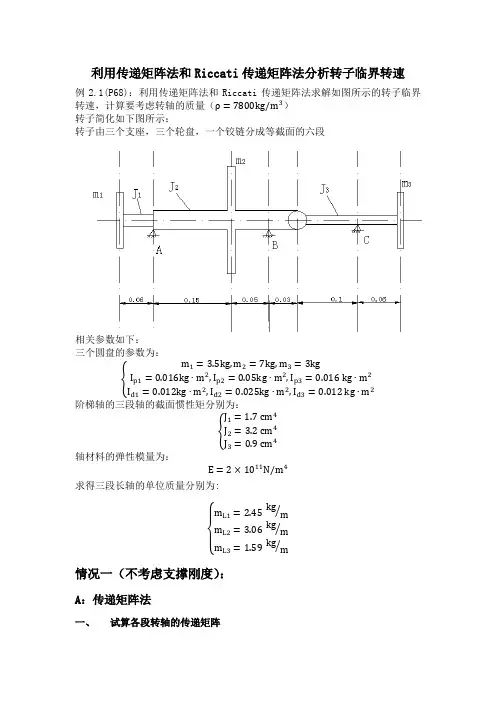
利用传递矩阵法和Riccati 传递矩阵法分析转子临界转速 例2.1(P68):利用传递矩阵法和Riccati 传递矩阵法求解如图所示的转子临界转速,计算要考虑转轴的质量(ρ=7800kg/m 3)转子简化如下图所示:转子由三个支座,三个轮盘,一个铰链分成等截面的六段相关参数如下:三个圆盘的参数为:{m 1=3.5kg,m 2=7kg,m 3=3kgI p1=0.016kg ∙m 2,I p2=0.05kg ∙m 2,I p3=0.016 kg ∙m 2I d1=0.012kg ∙m 2,I d2=0.025kg ∙m 2,I d3=0.012 kg ∙m 2阶梯轴的三段轴的截面惯性矩分别为:{J 1=1.7 cm 4J 2=3.2 cm 4J 3=0.9 cm 4轴材料的弹性模量为:E =2×1011N/m 4求得三段长轴的单位质量分别为:{ m L1=2.45 kg m ⁄m L2=3.06 kg m ⁄m L3=1.59 kg m ⁄ 情况一(不考虑支撑刚度):A :传递矩阵法一、 试算各段转轴的传递矩阵取试算转速p=ω=1500 rad s⁄ ; 则各轴段的传递矩阵分别为:第1段{l=0.06 mJ=1.7×10−8 m4 m L1=2.45 kg m⁄p=1500rad/s ; H1=[10.060.058415.29e−7 1.06e−81.77e−5 5.29e−79.92e31983.31e59.92e31 0.060.0584 1]第2段{l=0.15 mJ=3.2×10−8 m4 m L2=3.06 kg m⁄p=1500rad/s ; H2=[10.150.60611.76e−68.79e−82.35e−5 1.76e−67.76e4 3.88e31.04e67.76e41 0.150.606 1]第3段{l=0.05 mJ=3.2×10−8 m4 m L2=3.06 kg m⁄p=1500rad/s ; H3=[10.050.022411.95e−7 3.26e−97.81e−6 1.95e−78.61e31433.44e58.61e31 0.050.0224 1]第4段{l=0.03 mJ=3.2×10−8 m4 m L2=3.06 kg m⁄p=1500rad/s ; H4=[10.034.84e−317.03e−87.03e−104.69e−67.03e−83.10e331.02.07e53.10e31 0.034.84e−3 1]第5段{l=0.1 mJ=0.9×10−8 m4 m L3=1.59 kg m⁄p=1500rad/s ; H5=[10.10.33112.78e−69.26e−85.57e−5 2.78e−61.79e45963.58e5 1.79e41 0.10.331 1]第6段{l=0.06 mJ=0.9×10−8 m4 m L3=1.59 kg m⁄p=1500rad/s ; H6=[10.060.071611.00e−62.00e−83.33e−5 1.00e−66.44e31292.15e5 6.44e31 0.060.0716 1]此6段传递矩阵均采用MATLAB编程求解,MATLAB的源文件为zhouduan.m二、采用传递矩阵法进行各段轴的状态参数的传递初始参数列阵为:[X01θ01M01 Q01]=[X01θ01−(1−ωPI pI d)I d p2θ01m1p2X01]令X01=1,则初始矩阵可化为:[1θ019000θ017.875e6]以初始矩阵乘第一轴段的传递矩阵,则可得第一段轴的终端状态参数:[X k1θk1M k1 Q k1]=[1.08+0.065θ014.23+1.16θ014.825e5+9.206e3θ018.21e6+1.045e3θ01]根据X k1=0可计算得:θ01=−16.739;则,可得支座A后第2段的起始端参数阵为:[X02θ02M02 Q02]=[−15.1853.28e58.038e6−R A]其中,R A为刚性支座的反作用力;用第2段的传递矩阵乘此矩阵,可得第2段终端参数:[X k2θk2M k2Q k2]=[−1.003−8.79e(−8)∗R A6.353−1.76e(−6)∗R A1.488e6−0.15∗R A7.241e6−1.023R A]用中间圆盘的传递矩阵乘第2段终端参数阵,即可得第3段起始端参数:[X03θ03M03 Q03]=[−1.003−8.79e(−8)∗R A6.353−1.76e(−6)∗R A1.85e6−0.249∗R A−8.556e6−2.408∗R A]用第3段传递矩阵乘其始端参数矩阵,得其终端参数:[X k3θk3M k3Q k3]=[−0.353−2.32e(−7)∗R A19.08−4.184e(−6)∗R A1.41e6−0.371∗R A−8.81e6−2.459∗R A]则,根据X k3=0可得:R A=−1.518e6;则,可得支座B后第4段的起始端参数阵为:[X04θ04M04 Q04]=[25.431.974e6−5.075e6−R B]同上,用此段轴的传递函数乘其起始端的状态参数,可得:[X k4θk4M k4 Q k4]=[0.898−7.03e(−10)∗R B34.33−7.03e(−8)∗R B1.822e6−3e(−2)∗R B−4.987e6−R B]则,根据M k4=0可得:R B=6.075e7;则,可得第5段的起始参数矩阵:[X05θ05M05 Q05]=[0.85530.055+θ5−6.574e7]其中,θ5为铰链处的转角。