四轮独立转向四轮驱动电动汽车的研制
- 格式:doc
- 大小:1.27 MB
- 文档页数:10



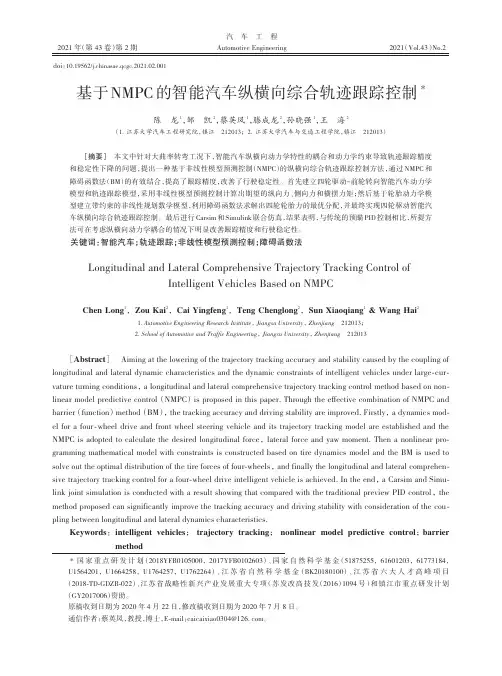
2021年(第43卷)第2期汽车工程Automotive Engineering2021(Vol.43)No.2 doi:10.19562/j.chinasae.qcgc.2021.02.001基于NMPC的智能汽车纵横向综合轨迹跟踪控制*陈龙1,邹凯2,蔡英凤1,滕成龙2,孙晓强1,王海2(1.江苏大学汽车工程研究院,镇江212013;2.江苏大学汽车与交通工程学院,镇江212013)[摘要]本文中针对大曲率转弯工况下,智能汽车纵横向动力学特性的耦合和动力学约束导致轨迹跟踪精度和稳定性下降的问题,提出一种基于非线性模型预测控制(NMPC)的纵横向综合轨迹跟踪控制方法,通过NMPC和障碍函数法(BM)的有效结合,提高了跟踪精度,改善了行驶稳定性。
首先建立四轮驱动-前轮转向智能汽车动力学模型和轨迹跟踪模型,采用非线性模型预测控制计算出期望的纵向力、侧向力和横摆力矩;然后基于轮胎动力学模型建立带约束的非线性规划数学模型,利用障碍函数法求解出四轮轮胎力的最优分配,并最终实现四轮驱动智能汽车纵横向综合轨迹跟踪控制。
最后进行Carsim和Simulink联合仿真,结果表明,与传统的预瞄PID控制相比,所提方法可在考虑纵横向动力学耦合的情况下明显改善跟踪精度和行驶稳定性。
关键词:智能汽车;轨迹跟踪;非线性模型预测控制;障碍函数法Longitudinal and Lateral Comprehensive Trajectory Tracking Control ofIntelligent Vehicles Based on NMPCChen Long1,Zou Kai2,Cai Yingfeng1,Teng Chenglong2,Sun Xiaoqiang1&Wang Hai21.Automotive Engineering Research Institute,Jiangsu University,Zhenjiang212013;2.School of Automotive and Traffic Engineering,Jiangsu University,Zhenjiang212013[Abstract]Aiming at the lowering of the trajectory tracking accuracy and stability caused by the coupling of longitudinal and lateral dynamic characteristics and the dynamic constraints of intelligent vehicles under large‑cur‑vature turning conditions,a longitudinal and lateral comprehensive trajectory tracking control method based on non‑linear model predictive control(NMPC)is proposed in this paper.Through the effective combination of NMPC and barrier(function)method(BM),the tracking accuracy and driving stability are improved.Firstly,a dynamics mod‑el for a four‑wheel drive and front wheel steering vehicle and its trajectory tracking model are established and the NMPC is adopted to calculate the desired longitudinal force,lateral force and yaw moment.Then a nonlinear pro‑gramming mathematical model with constraints is constructed based on tire dynamics model and the BM is used to solve out the optimal distribution of the tire forces of four‑wheels,and finally the longitudinal and lateral comprehen‑sive trajectory tracking control for a four‑wheel drive intelligent vehicle is achieved.In the end,a Carsim and Simu‑link joint simulation is conducted with a result showing that compared with the traditional preview PID control,the method proposed can significantly improve the tracking accuracy and driving stability with consideration of the cou‑pling between longitudinal and lateral dynamics characteristics.Keywords:intelligent vehicles;trajectory tracking;nonlinear model predictive control;barrier method*国家重点研发计划(2018YFB0105000,2017YFB0102603)、国家自然科学基金(51875255,61601203,61773184,U1564201,U1664258,U1764257,U1762264)、江苏省自然科学基金(BK20180100)、江苏省六大人才高峰项目(2018‑TD‑GDZB‑022)、江苏省战略性新兴产业发展重大专项(苏发改高技发(2016)1094号)和镇江市重点研发计划(GY2017006)资助。
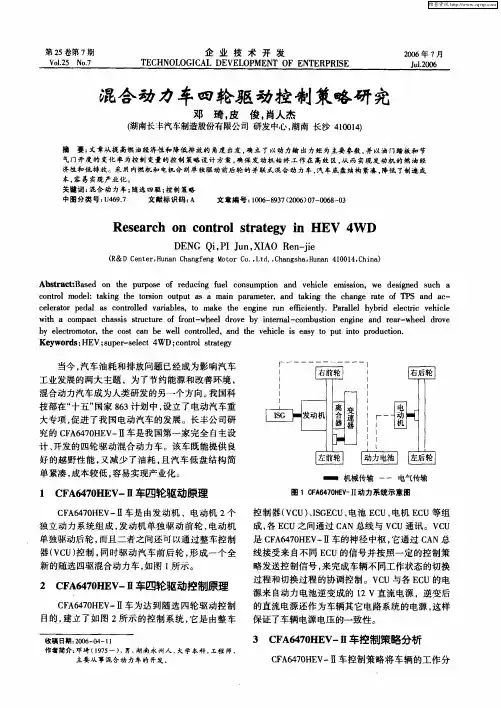
四驱电动汽车变附着路面行驶操稳性控制研究
顾柳恒;张军
【期刊名称】《机械设计与制造》
【年(卷),期】2024()2
【摘要】针对四轮驱动电动汽车行驶时路面峰值附着系数和附着利用率变化的问题,提出利用直接横摆力矩控制提高操纵稳定性的控制策略。
该策略采用分层控制,上层控制器负责目标车速的追踪、滑移率调整力矩的计算、以及根据行驶危险程度实现对质心侧偏角和横摆角速度的协调控制,下层控制器包括以轮胎利用率最优为目标的分配算法及集成滑移率控制的分配算法,根据滑移率大小实时切换。
Carsim-Simulink联合仿真结果表明,在对开路面行驶时,相比于转矩平均分配控制策略,该控制策略能够使车辆具有良好操稳性的同时保持各车轮处于最佳滑移率区间内,有效改善了车辆性能。
【总页数】5页(P36-40)
【作者】顾柳恒;张军
【作者单位】北京理工大学机械与车辆学院
【正文语种】中文
【中图分类】TH16
【相关文献】
1.分布式电动汽车行驶状态与路面附着系数估计
2.分布式电动汽车行驶状态与路面附着系数估计
3.考虑路面附着条件影响的电动汽车制动力变比值优化分配算法研
究4.分布式驱动电动汽车操稳性鲁棒增益调度控制研究5.低附着路面下四轮独立驱动电动汽车稳定性控制
因版权原因,仅展示原文概要,查看原文内容请购买。
关于四驱技术特点的描述中-概述说明以及解释1.引言1.1 概述四驱技术是指车辆通过四个车轮驱动力来提供动力的一种技术。
相比于普通的两驱车辆,四驱技术具有更强的抓地力和稳定性,在各种路况下表现更出色。
四驱技术广泛应用于越野车、SUV以及高性能轿车等车型中,为驾驶者带来更好的操控感和驾驶体验。
四驱技术的优势主要在于其出色的操控性和车辆动力的平衡性。
通过四个车轮分别提供驱动力,四驱车辆能够更好地适应各种复杂路况,如雨雪、泥泞或崎岖山路等。
这是因为四驱车辆可以通过调节四个车轮的扭矩分配,将动力传递给抓地能力较好的车轮,从而提高车辆的牵引力和通过能力。
此外,四驱技术还可以提升车辆的稳定性和操控性。
在高速行驶或急转弯时,四驱车辆能够更好地分配车辆的重量,保持车辆的平衡状态,提高行驶的稳定性。
同时,四驱技术还能够提供更大的侧向抓地力,减少车辆在转弯时的侧滑风险,使驾驶者更有信心和掌控力。
总而言之,四驱技术通过四个车轮的驱动力分配和调节,能够提供更好的抓地力、稳定性和性能操控,成为越野车、SUV以及高性能轿车等车型中的重要技术。
未来,随着科技的不断进步,四驱技术还有望进一步完善和创新,为驾驶者提供更卓越的驾驶体验。
1.2文章结构文章结构部分描述了整篇文章的组织和内容安排。
在本篇长文中,文章结构可以按照以下方式进行描述:文章结构部分:本文将按照以下结构来展开对四驱技术特点的描述:1. 引言部分1.1 概述:对四驱技术进行简要介绍,说明其在汽车行业中的重要性和应用范围。
1.2 文章结构:介绍本文的组织结构和内容安排,包括各个章节的主题和要点。
1.3 目的:明确本文的写作目的,阐述作者对四驱技术特点描述的目标和意义。
2. 正文部分2.1 四驱技术的定义:详细解释四驱技术的概念和定义,并介绍其基本原理和工作方式。
2.2 四驱技术的优势:探讨四驱技术的优势和特点,包括增强车辆驱动力和操控性、提高行驶稳定性和通过性等方面。
四轮轮毂电机驱动电动汽车建模与联合仿真
葛平淑;张涛;赵秀春;崔艳秋
【期刊名称】《大连民族学院学报》
【年(卷),期】2017(019)005
【摘要】利用Carsim和Matlab/Simulink搭建驾驶员闭环控制的四轮轮毂电机独立驱动电动汽车仿真模型;根据轮毂电机驱动电动汽车特点,建立轮毂电机模型、速度控制模型和整车模型;设计横摆力矩控制器和力矩分配控制策略,实现联合仿真的接口设置;最后利用双移线工况验证了所开发模型的正确性和转矩分配策略的有效性.
【总页数】5页(P451-455)
【作者】葛平淑;张涛;赵秀春;崔艳秋
【作者单位】大连民族大学机电工程学院,辽宁大连116605;大连民族大学机电工程学院,辽宁大连116605;大连民族大学机电工程学院,辽宁大连116605;大连民族大学信息与通信工程学院,辽宁大连116605
【正文语种】中文
【中图分类】U469.72
【相关文献】
1.四轮轮毂电机驱动电动汽车电机/液压系统联合控制策略 [J], 杨鹏飞;熊璐;余卓平
2.基于ADAMS/Simulink联合仿真的电动汽车四轮轮毂电机驱动控制 [J], 余波
3.分布式电动汽车四轮轮毂电机驱动系统开发 [J], 刘文超;陈国迎;宗长富;李春善;张冰
4.四轮轮毂电机驱动电动汽车建模与联合仿真 [J], 葛平淑;张涛;赵秀春;崔艳秋;
5.轮毂电机驱动电动汽车的四轮转向操纵稳定性分析 [J], 李安
因版权原因,仅展示原文概要,查看原文内容请购买。
毕业设计(论文)开题报告结构,减轻了电动轮系统的质量.集成化设计程度相当高,电动轮结构如图错误!文档中没有指定样式的文字。
.4所示。
TM4公司研制的这个电动轮系统的永磁无刷直流电动机性能非常高,其峰值功率可咀达到80kw,峰值扭矩为670Nm.最高转速为1385rpm,额定功率为18.5kw.额定转速为950rpm,额定工况下的平均效率可以达到96.3%。
国内,哈尔滨工业大学一爱英斯电动汽车研究所研制开发的EV96-1型电动汽车驱动电动轮也属于外转予型电动机。
该电动机选用的是一种“多态电动机”的永磁电动机,兼有同步电动机和异步电动机的双重特性,集成盘式制动嚣,采用风净敖热系统。
同济大学汽车学院试制的四轮驱动电动汽车“春晖一号”、“春晖二号一和“春晖三号"均采用四个直流无刷轮毂电动机,外置式盘式制动器。
比亚迪于2004年在北京车展上展出的ET概念车也采用了4个轮边电机独立驱动的模式。
中国科学院北京三环通用电气公司研制的电动轿车用直流无刷轮毂电机,又称电动车轮。
单个电动车轮功率为7.5kW,电压264V,双后轮直接驱动。
国内,哈尔滨工业大学一爱英斯电动汽车研究所研制开发的EV96-1型电动汽车驱动电动轮也属于外转予型电动机。
该电动机选用的是一种“多态电动机”的永磁电动机,兼有同步电动机和异步电动机的双重特性,集成盘式制动嚣,采用风净敖热系统。
同济大学汽车学院试制的四轮驱动电动汽车“春晖一号”、“春晖二号一和“春晖三号"均采用四个直流无刷轮毂电动机,外置式盘式制动器。
比亚迪于2004年在北京车展上展出的ET概念车也采用了4个轮边电机独立驱动的模式。
中国科学院北京三环通用电气公司研制的电动轿车用直流无刷轮毂电机,又称电动车轮。
单个电动车轮功率为7.5kW,电压264V,双后轮直接驱动。
图错误!文档中没有指定样式的文字。
.1KAZ电动汽车图错误!文档中没有指定样式的文字。
.2 Eliica电动汽车图错误!文档中没有指定样式的文字。
第1章差速器/差速锁——不能混淆的基础概念!1.1差速器从世界上第一辆汽车的诞生之后不久,差速器这个东西也就随之诞生了,它存在的意义只有一个——为了汽车能正常转弯。
过去的马车两侧车轮是通过一根硬轴链接的,所以两侧的车轮的转速永远是相同的,因为无法差速,转弯的时候内侧的车轮除了滚动摩擦外还会有滑动摩擦,还好马车的车轮是木头做的,耐磨……同理汽车在转弯的时候也会有同样的问题,如果还是采用一根硬轴链接,那么转弯时汽车的轮胎等部件将会受到严重的损伤。
为了解决这个问题,当今汽车都是两个半轴的设计,将两个半轴链接起来的就是差速器,有了差速器也就允许两侧车轮有转速差。
『直行状态下差速器不工作』『转弯状态下差速器工作』能达到实现两侧车轮转速不一样,最重要的是差速器里面的一组行星齿轮。
为了通俗易懂,我们做一个比喻:差速器壳体里面的一组行星齿轮就可以抽象地看作为只有一个齿的“齿轮”,也就是一根棍子,这个棍子可以链接两侧的半轴,并带动两个半轴旋转。
注意,这个棍子除了随着传动轴公转,同时还可以自转。
如果两侧的车辆受到的摩擦力是相同的,那么这根棍子就不会有自转,即两侧车轮转速也相同;如果有一侧车轮受到的摩擦力大于另一侧,那么这根棍子本身就会发生自转,这样在不改变公转转速的情况加上自转,就可以达到两侧转速不一样的目的。
也就是说,如果一侧的轮子被卡死不能转动了,那也无妨,虽然动力依然存在,但这个会自转的棍子就会带动那个没有被卡死的轮子转动。
如果再加上更多的棍子,也就形成了齿轮,即行星齿轮,也是差速器的核心部分。
当今的汽车通常有一组四个行星齿轮。
优点:可以让车辆正常转弯,允许两侧车轮有转速差;缺点:在越野路况下差速器会影响车辆的脱困性。
小贴士:一般来说,越野性能的是否优良一般是由两个指标来判断的。
①通过性:接近角、离去角、车身最小离地间隙越大的车通过性越好。
②脱困性:在极限路况下能够自救的能力。
(有差速锁的车型脱困性较强)差速器对越野性能的影响:由于差速器允许车轮以不同转速转动,所以在泥泞等路面,当一个车轮打滑时,动力全部消耗在飞快转动的打滑车轮上了,其他车轮会失去动力。
论述四轮驱动的形式和特点(三级)一、什么是四轮驱动?说到四轮驱动,总能使人们想起那些身材魁梧、威猛超群的越野车。
的确,四轮驱动的出现就是为了针对恶劣路况,征服那些两只车轮无法通过的险峻地形。
最初,四轮驱动是纯种越野车的专门配备。
但随着汽车工业的发展,以及人们对于汽车文化更加深入的认识,四驱车型通过性、爬坡性、转弯性能、启动和加速性能以及直线行驶性能都有较高的提升,虽说结构复杂、重量增加、成本升高、震动和噪音略有升高、油耗增加,但越来越多的车辆采用了四轮驱动系统。
四轮驱动,顾名思义是指汽车前后轮都有动力驱动,可以按照行驶路面状态的不同而将发动机输出扭矩按不同比例分布在前后所有的轮子上,遇到路况不好才不易出现车轮打滑,汽车的通过能力得到相当大地改善:对SUV、越野车来说,能提高越野路况的通过能力,而对轿车来说,则主要提高弯道的操控性能。
四轮驱动一般用4×4或者4WD来表示,注明这些符号的汽车就是有四轮驱动的功能。
二、为什么很多车辆需要四轮驱动呢?根本原因就在于,通常情况下四轮驱动比起两轮驱动,具有更高的通过性能,也就是指车辆通过复杂地形的能力。
当车辆行驶于复杂路况时,对于一辆普通的两驱车来说,一旦两个驱动轮中的任何一个车轮无论何种原因而失去行驶附着力的话,理论上讲,在不借助任何外力的情况下,车辆将无法继续前进。
车辆进行直线行驶时,两侧车轮的行驶距离是完全相同的,并无转速差异。
但在转弯时,如果继续保持这种行驶状态,将会对车辆造成严重的损伤,并且无法顺利通过弯道,原因是,车辆在弯道行驶时,外侧车轮行驶的距离要大于内侧车轮,由于通过的时间相等,所以两侧车轮之间存在转速差,所以不能采用刚性连接。
差速器的出现巧妙地解决了这一问题,差速器的差速原理是:弯道行驶时,车辆两侧驱动轮所受到的转动阻力是不同的,差速器的实际功能就在于消除两侧车轮的阻力差,也就是说,只有两侧驱动轮出现阻力差,差速器才会工作,并且差速器的“差速程度”与“阻力差”是成正比的。
独立驱动电动汽车稳定性的滑模变结构控制林程;彭春雷;曹万科【摘要】为充分利用双电机独立驱动电动汽车两侧电机独立可控这个特点来提高车辆稳定性,在研究汽车动力学与稳定性特点的基础上,利用MATLAB/Simulink建立了包括任意路径下的单点预瞄驾驶员模型和“魔术公式”轮胎模型在内的8自由度的“人-车”闭环动力学仿真平台.运用滑模变结构控制原理,分别设计了以两侧电机为执行机构,以横摆角速度、质心侧偏角和横摆角速度与质心侧偏角联合为控制变量的3种等速趋近滑模变结构控制器,在仿真平台进行了稳定性控制的仿真.结果表明,3种控制器均可有效提高汽车极端工况下的操纵稳定性,其中,又以横摆角速度与质心侧偏角为联合控制变量的控制器效果最好.【期刊名称】《汽车工程》【年(卷),期】2015(037)002【总页数】7页(P132-138)【关键词】独立驱动电动车;稳定性控制;驾驶员模型;滑模变结构控制器【作者】林程;彭春雷;曹万科【作者单位】北京理工大学机械与车辆学院,北京100081;北京理工大学机械与车辆学院,北京100081;中国北方车辆研究所,北京100072;北京理工大学机械与车辆学院,北京100081【正文语种】中文节能、环保、安全是汽车发展的三大主题,作为汽车主动安全重要技术的电子稳定程序ESP(或ESC、VDC)受到越来越多的关注,目前ESP主要通过3种方式来实现汽车的稳定性控制:调整转向角[1]、调整垂向载荷和调整驱动制动力。
调整转向角进行稳定性控制,只在汽车的线性范围内比较有效;调整垂向载荷进行稳定性控制,只适用于装有主动悬挂的汽车,而且也只有在很大的侧向加速度或侧倾角时才有效;随着ABS和TCS的发展,控制汽车的制动力和驱动力比较容易,而制动力和驱动力的控制对汽车的具体设计也没有特殊要求。
因此目前多采用第3种方法,即通过对制动力和驱动力的控制来实现汽车的稳定性控制。
传统内燃机汽车通过驱动进行稳定性控制比较复杂而且难以实现精确控制,而双电机独立驱动电动汽车的两个驱动电机独立可控,且响应快速准确,通过驱动力来控制汽车的稳定性将强化目前的TCS和ESP功能,有助于增强汽车的操纵稳定性和行驶安全性。
四轮驱动EV自适应抗差无迹粒子滤波状态估计作者:龙云泽韦韬封进张瑞宾来源:《湖南大学学报·自然科学版》2022年第02期摘要:针对四轮毂电机驱动电动汽车转矩控制中整车质心侧偏角等关键状态参数无法直接检测及车速等测量值易受到随机误差干扰的问题,建立四轮毂电机驱动电动汽车七自由度动力学模型,进行整车行驶状态参数滤波估计.结合抗差滤波原理及无迹粒子滤波算法,提出一种整车状态滤波估计方法.运用自适应抗差无迹粒子滤波,实现电动汽车行驶过程中纵向速度、侧向速度和质心侧偏角的准确滤波估计.搭建CarSim与Matlab/Simulink联合仿真实验平台对估计算法进行验证.结果表明:所搭建四轮毂电机驱动汽车动力学模型对整车行驶状态具有较高的预测精度;基于自适应抗差无迹粒子滤波算法能实现整车行驶状态估计,能有效对测量参数进行滤波,且具有较高的估计精度.关键词:四轮毂电机驱动;电动汽车;车辆状态估计;自适应抗差无迹粒子滤波中图分类号:U461.1文献标志码:A收稿日期:2021-07-06基金项目:广西高校中青年教师科研基础能力提升项目(2020KY21014,2021KY0795)作者简介:龙云泽(1984—),男,广西桂林人,桂林航天工业学院工程师†通信联系人,E-mail:******************四轮驱动电动汽车(Electric Vehicle,EV)省去了传统燃油车较长的传动链,具有车辆底盘结构简单、传动效率高、驱动形式多样化等优点,已成为全球汽车领域研究热点[1].四轮驱动EV的轮毂电机驱动力独立可控,可实现整车多动力学状态驱动,而整车状态参数值的精确性是影响驱动模式优化及主动安全控制的关键因素.近年来,改进卡尔曼滤波算法在四轮毂电机汽车整车状态估计中得到了广泛的运用[2].扩展卡尔曼滤波(extendedKalmanfilter,EKF)理论可实现整车非线性系统的狀态估计,但此方法需要计算复杂的雅可比矩阵,且存在线性化误差的影响[3-4].无迹卡尔曼滤波(unscentedKalmanfilter,UKF)引入无损变换的思想,有效地克服EKF估计精度低、稳定性差的问题,在四轮驱动汽车状态估计中得到了较好的应用,但其对整车参数估计结果在系统强非线性状态下,精度会下降明显[5].粒子滤波(particlefilter,PF)的思想是利用粒子集来表示概率,从后验概率中抽取的随机状态粒子来表达其分布,该滤波方法具有较强的非线性适应能力及多模态处理能力.但该方法在重采样阶段会造成样本有效性和多样性的损失,导致样本贫化现象.国内外不少学者运用粒子群优化粒子滤波算法实现整车状态估计,取得较好效果,但算法存在计算量较大,工程实现困难大的问题.[6-8]无迹粒子滤波(unscented particle filter,UPF)算法运用无迹卡尔曼滤波方法生成建议密度函数,使先验概率峰值与似然函数峰值具有良好的吻合性,达到降低粒子退化的目的,但其运算精度受系统噪声不确定性的影响,且缺少自适应调整机制,不能对滤波增益及相关参数进行实时调节.抗差估计滤波方法,可对滤波器参数进行实时调节,对干扰噪声具有较好的自适应性[9].基于抗差滤波原理及无迹粒子滤波算法,构建自适应抗差无迹粒子滤波算法(adaptive robust unscented particle filter,ARUPF),通过整车动力学模型理论预测与实际测量融合的方法,实现四轮驱动电动汽车状态的精确估计.为解决四轮驱动电动汽车状态估计问题,建立整车七自由度整车动力学模型,通过引入权矩阵及自适应调节因子构建自适应抗差无迹粒子滤波算法,实现对整车状态的精确估计,并运用CarSim与Matlab/Simulink软件进行联合仿真验证该方法的有效性.1四轮驱动电动汽车动力学建模从七自由度整车动力学模型、车轮运动学模型、轮胎模型三个方面搭建四轮驱动汽车动力学模型.通过魔术公式轮胎模型计算各轮胎纵向及侧向驱动力,并结合七自由度整车动力学模型与车轮运动学模型进行整车动力学状态分析[10].1.1七自由度整车动力学模型建立四轮毂电机驱动车七自由度动力学模型,如图1所示.研究的目标为对整车行驶过程中纵向速度、侧向速度、质心侧偏角进行实时准确估计.因此模型考虑整车纵向运动、侧向运动、横摆运动及四轮毂电机转动自由度.模型作了以下近似:1)忽略整车垂向运动、绕y轴的俯仰运动、绕x轴侧倾3个运动的影响;2)忽略滚动阻力影响;3)忽略风阻影响;4)假设两前轮具有相同的转向角和侧偏角;5)采用传统的前轮转向方式;6)假设两后轮的侧偏角一致;7)假设各轮胎动力学特性一致.七自由度四轮毂驱动汽车动力学方程如下[11-12].式中;vx为整车纵向速度;vy为整车侧向速度;γ为整车横摆角速度;ax为纵向加速度;ay为侧向加速度;Fxfl、Fxfr、Fyfl、Fyfr、Fxrl、Fxrr、Fyrl、Fyrr分别为左前轮纵向力、右前轮纵向力、左前轮侧向力、右前轮侧向力、左后轮纵向力、右后轮纵向力、左后轮侧向力、右后轮侧向力;M为横摆力矩;β为质心侧偏角;δf为前轮转向角;m为整车质量;d、d分别为前、后轮轮距.α、frflαfr、αrl、αrr分别为左前轮、右前轮、左后轮、右后轮轮胎侧偏角.1.2车轮运动学模型四轮驱动电动汽车车轮运动学模型为:式中:Iw为车轮转动惯量;ωfl、ωfr、ωrl、ωrr分别为左前轮、右前轮、左后轮、右后轮转动角速度;Tfl、Tfr、Trl、Trr分别为左前轮、右前轮、左后轮、右后轮驱动转矩;Tbfl、Tbfr、Tbrl、Tbrr分别为左前轮、右前轮、左后轮、右后轮制动转矩;Re为车轮滚动半径.1.3魔术公式轮胎模型魔术公式轮胎模型能较好地模拟轮胎非线性动力学特性,得出各轮的纵向力与侧向力.魔术公式轮胎模型公式如下:式中:Fxij为车轮纵向力;Fyij为车轮侧向力;B为刚度因子;C为曲线形状因子;D为峰值因子;E为曲线曲率因子;λ为纵向滑移率;α为侧偏角.其中纵向滑移率λij分为驱动与制动两情况[13]:式中:re为车轮有效滚动半径;ωij为车轮滚动角速度;vij为车轮中心运动速度.2ARUPF整车状态估计算法以七自由度汽车动力学模型为基础,四轮驱动电动汽车行驶状态估计原理如图2所示.基于ARUPF算法,运用整车状态预测值与传感器观测值相结合,实现对整车行驶状态的实时估计[14].传统的粒子滤波算法存在迭代过程中粒子退化的缺陷,造成计算资源浪费、估计结果精度偏低等问题.为解决以上问题,常运用增加粒子数、重采样、选择合理的建议密度函数等方法对滤波算法进行优化.增加粒子数可有效缓解粒子退化,但增加了系统计算工作量.重采样方法可增加粒子的多样性,避免粒子退化.自适应抗差无迹粒子滤波算法利用无迹变换算法为每个粒子计算均值和协方差并建立合理建议密度函数,并结合抗差滤波估计算法自动调节增益矩阵及系统方差,使样本点分布较好地与最大似然函数吻合.无迹粒子滤波算法易于工程实现,能有效减少系统计算工作量,其具体方法如下:1)初始化,k=0,从先验分布抽取初始状态粒子.式中:-x(i)、P(i)分别为初始粒子数学期望和方差;-x(i)a、P(i)a分别为初始Sigma点数学期望和方差;Q、R分别为系统协方差矩阵及观测协方差矩阵.2)重要性采样.运用无迹卡尔曼算法计算均值与方差.(1)抽取Sigma点集合.式中:x1p,分别为抽取粒子数学期望和方差;n、入分别为状态维数和缩放比例因子.(2)对Sigma点集进行一步预测.式中:xk|k-1、xk|k-1、Pk|k-1分别为一步预测后Sigma粒子状态值、数学期望和方差;Z-1灬Z-1分别为一步预测后Sigma点输入观测方程所得观测值和观测均值.Wm、W,分别为Sigma对应的均值计算权值和协方差计算权值.(3)融入观测数据,更新Sigma点集均值、卡尔曼增益及协方∑差.式中:P--、P分别为加权计算所得观测协方差和系统方差;K、x、P分别为状态更新后系统增益矩阵、状态值和方差.3)ARUPF算法.ARUPF算法基于抗差估计滤波理论,对动力学模型观测量值异常情况加以控制,并构建自适应因子对动力学模型误差加以控制.设P为状态向量的权矩阵,则等价权阵为下=diag(Pi,P2,·,P).运用IGG(Institute of Geod-esy&Geophysics)方法产生等价权函数,其原理如下:为传感器探测残差值;调节因子参考取值范围K0∈(1,1.5);调节因子参考取值范围K∈(3,8).g令傳感器感知矩阵为A,根据权矩阵,对系统状态向量进行更新.可得自适应抗差卡尔曼滤波的系统状态解向量为:式中:αk为自适应因子;调节因子c0参考取值范围c0∈(1,1.5);调节因子c1参考取值范围c1∈(3,8);tr为矩阵求迹运算符.-上述公式中通过判断残差获得权矩阵Pk;通过状态估计值与预报值的差值运算获得自适应因子αk.运用两个参数同时调节Kalman增益、采样粒子均值及粒子权值,更新粒子并归一化权重.式中:K*为抗差算法计算后Kalman增益;-x(i)*为状态样本均值;P^(i)*为样本方差.W (i)*为更新后的粒子权Kk重值.利用重采样算法,基于归一化权值对粒子集合进行淘汰与复制,对新粒子重新设置权重.当预测模型存在过大的异常干扰时,自适应因子αk减小,可以减弱干扰的影响.当观测模型存在较大干扰时,通过调节权矩阵Pk减小干扰造成的异常影响.运用自适应抗差无迹粒子滤波算法可有效解决系统观测粗大误差问题及状态异常问题,建立合理的粒子分布,有效地解决了粒子的退化问题.3仿真实验验证运用CarSim与Matlab/Simulink软件进行联合仿真实验对估计算法进行验证.CarSim软件专门针对车辆动力学特性搭建出各种车型动力学仿真模型,其模型的仿真性能接近于实车,仿真结果被国际众多汽车制造商和零部件供应商所采用.在CarSim软件中搭建四轮毂驱动电动汽车模型,将其部分运行参数作为整车传感器测量参数输入Simulink仿真软件.在Simulink软件中搭建车辆动力学模型及ARUPF滤波算法,进行车辆运行状态估计,并将估计值与CarSim 软件车辆模型进行对比验证[15].整车关键参数如表1所示.CarSim整车模型选用B型车,仿真实验工况选用ISO双移线实验工况,车速为30km/h,路面附着系数为0.6.所搭建CarSim与Matlab/Simulink联合仿真模型如图3所示.基于ARUPF算法,选取所估计的状态向量为x=[vxvyβ]T.以Carsim整车模型部分参数,作为传感器所测得的车辆状态真实值,输入至Simulink整车动力学模型,进行状态预测.Carsim整车模型的前轮转角、车轮转速、纵向加速度、侧向加速度、横摆角速度如图4(a)~图4(e)所示.将预测值与观测状态加入随机噪声,共同输入ARUPF滤波器进行状态估计.将粒子滤波、无迹粒子滤波与自适应抗差无迹粒子滤波后整车状态估值与理想值对比,所得结果如图5(a)~图5(c)所示.由仿真结果可知,CarSim软件输出的真实值与Simulink中所搭建仿真动力学模型的ARUPF状态估计值相接近,验证了动力学模型的正确性.PF估计值在后期由于粒子退化的原因易造成较大的估计误差,所采用ARUPF状态估计算法有效地解决了传统粒子滤波算法样本贫化造成的精度下降问题,其状态估计的精度优于UPF算法.所搭建ARUPF滤波器针对过程噪声的滤波效果较好,具有较好的自适应性及抗干扰能力.魔术公式轮胎模型能较好地模拟轮胎非线性动力学特性,得出各轮的纵向力与侧向力.魔术公式轮胎模型公式如下:式中:Fxij为车轮纵向力;Fyij为车轮侧向力;B为刚度因子;C为曲线形状因子;D为峰值因子;E为曲线曲率因子;λ为纵向滑移率;α为侧偏角.其中纵向滑移率λij分为驱动与制动两情况[13]:式中:re为车轮有效滚动半径;ωij为车轮滚动角速度;vij为车轮中心运动速度.2ARUPF整车状态估计算法以七自由度汽车动力学模型为基础,四轮驱动电动汽车行驶状态估计原理如图2所示.基于ARUPF算法,运用整车状态预测值与传感器观测值相结合,实现对整车行驶状态的实时估计[14].传统的粒子滤波算法存在迭代过程中粒子退化的缺陷,造成计算资源浪费、估计结果精度偏低等问题.为解决以上问题,常运用增加粒子数、重采样、选择合理的建议密度函数等方法对滤波算法进行优化.增加粒子数可有效缓解粒子退化,但增加了系统计算工作量.重采样方法可增加粒子的多样性,避免粒子退化.自适应抗差无迹粒子滤波算法利用无迹变换算法为每个粒子计算均值和协方差并建立合理建议密度函数,并结合抗差滤波估计算法自动调节增益矩阵及系统方差,使样本点分布较好地与最大似然函数吻合.无迹粒子滤波算法易于工程实现,能有效减少系统计算工作量,其具体方法如下:1)初始化,k=0,从先验分布抽取初始状态粒子.式中:-x(i)、P(i)分别为初始粒子数学期望和方差;-x(i)a、P(i)a分别为初始Sigma点数学期望和方差;Q、R分别为系统协方差矩阵及观测协方差矩阵.2)重要性采样.运用无迹卡尔曼算法计算均值与方差.(1)抽取Sigma点集合.式中:x1p,分别为抽取粒子数学期望和方差;n、入分别为状态维数和缩放比例因子.(2)对Sigma点集进行一步预测.式中:xk|k-1、xk|k-1、Pk|k-1分别为一步预测后Sigma粒子状态值、数学期望和方差;Z-1灬Z-1分别为一步预测后Sigma点输入观测方程所得观测值和观测均值.Wm、W,分别为Sigma对应的均值计算权值和协方差计算权值.(3)融入观测数据,更新Sigma点集均值、卡尔曼增益及协方∑差.式中:P--、P分别为加权计算所得观测协方差和系统方差;K、x、P分别为状态更新后系统增益矩阵、状态值和方差.3)ARUPF算法.ARUPF算法基于抗差估计滤波理论,对动力学模型观测量值异常情况加以控制,并构建自适应因子对动力学模型误差加以控制.设P为状态向量的权矩阵,则等价权阵为下=diag(Pi,P2,·,P).运用IGG(Institute of Geod-esy&Geophysics)方法产生等价权函数,其原理如下:为传感器探测残差值;调节因子参考取值范围K0∈(1,1.5);调节因子参考取值范围K∈(3,8).g令传感器感知矩阵为A,根据权矩阵,对系统状态向量进行更新.可得自适应抗差卡尔曼滤波的系统状态解向量为:式中:αk为自适应因子;调节因子c0参考取值范围c0∈(1,1.5);调节因子c1参考取值范围c1∈(3,8);tr为矩阵求迹运算符.-上述公式中通过判断残差获得权矩阵Pk;通过状态估计值与预报值的差值运算获得自适应因子αk.运用两个参数同时调节Kalman增益、采样粒子均值及粒子权值,更新粒子并归一化权重.式中:K*为抗差算法计算后Kalman增益;-x(i)*为状态样本均值;P^(i)*为样本方差.W (i)*為更新后的粒子权Kk重值.利用重采样算法,基于归一化权值对粒子集合进行淘汰与复制,对新粒子重新设置权重.当预测模型存在过大的异常干扰时,自适应因子αk减小,可以减弱干扰的影响.当观测模型存在较大干扰时,通过调节权矩阵Pk减小干扰造成的异常影响.运用自适应抗差无迹粒子滤波算法可有效解决系统观测粗大误差问题及状态异常问题,建立合理的粒子分布,有效地解决了粒子的退化问题.3仿真实验验证运用CarSim与Matlab/Simulink软件进行联合仿真实验对估计算法进行验证.CarSim软件专门针对车辆动力学特性搭建出各种车型动力学仿真模型,其模型的仿真性能接近于实车,仿真结果被国际众多汽车制造商和零部件供应商所采用.在CarSim软件中搭建四轮毂驱动电动汽车模型,将其部分运行参数作为整车传感器测量参数输入Simulink仿真软件.在Simulink软件中搭建车辆动力学模型及ARUPF滤波算法,进行车辆运行状态估计,并将估计值与CarSim 软件车辆模型进行对比验证[15].整车关键参数如表1所示.CarSim整车模型选用B型车,仿真实验工况选用ISO双移线实验工况,车速为30km/h,路面附着系数为0.6.所搭建CarSim与Matlab/Simulink联合仿真模型如图3所示.基于ARUPF算法,选取所估计的状态向量为x=[vxvyβ]T.以Carsim整车模型部分参数,作为传感器所测得的车辆状态真实值,输入至Simulink整车动力学模型,进行状态预测.Carsim整车模型的前轮转角、车轮转速、纵向加速度、侧向加速度、横摆角速度如图4(a)~图4(e)所示.将预测值与观测状态加入随机噪声,共同输入ARUPF滤波器进行状态估计.将粒子滤波、无迹粒子滤波与自适应抗差无迹粒子滤波后整车状态估值与理想值对比,所得结果如图5(a)~图5(c)所示.由仿真结果可知,CarSim软件输出的真实值与Simulink中所搭建仿真动力学模型的ARUPF状态估计值相接近,验证了动力学模型的正确性.PF估计值在后期由于粒子退化的原因易造成较大的估计误差,所采用ARUPF状态估计算法有效地解决了传统粒子滤波算法样本贫化造成的精度下降问题,其状态估计的精度优于UPF算法.所搭建ARUPF滤波器针对过程噪声的滤波效果较好,具有较好的自适应性及抗干扰能力.。
创新项目:四轮独立转向四轮驱动电动汽车的研制
信息调研概况表
信息调研主题了解四轮独立转向四轮驱动电动汽车的设计方案及研发现状
项目背景研究目的
设计出适合电动汽车的底盘系统,使电动汽车底盘实现电子化、
主动化,提高电动汽车性能。
研究内容
收集并分析国内外研究现状,为设计一种四轮独立转向四轮驱
动的电动汽车方案提供信息参考和数据支持。
信息收集参考书
[1]史文库主编. 现代汽车新技术. 北京市:国防工业出版社,
2011.02.
[2]胡骅,宋慧主编. 电动汽车. 北京市:人民交通出版社,
2003.
[3]苗丽芬主编. 青春创想曲深圳职业技术学院学生科技创新
优秀作品集. 广州市:华南理工大学出版社, 2008.
[4]吴光强主编. 汽车理论. 北京市:人民交通出版社, 2007.
(摘自图书信息调研结果,列举3-4个即可。
)
收集到的信息类型
(必含类型)图书、期刊论文、专利、标准、网络信息;(可选
类型)其他
使用过的检索工具
人员分工
图书:期刊:专利:标准:网络信息:其他:调研结果简单总结
本次调研共收集标准**条;专利**条……根据信息调研结果,可得出初步结论:本项
目已有少量相关技术成果,但本项目方案仍存在优势,有发展空间。
信息类型图书
检索工具图书馆OPAC馆藏书目查询系统
检索式及检索结果检索项:题名关键词
检索式:电动汽车
检索结果:33条记录(如右图)
(包括电动汽车原理、结构、技术、设计、测试、评价等)
检索项:题名关键词
检索式:四轮驱动
检索结果:1条记录(如右图)
信息调研详表
信息类型期刊论文
检索工具中国知网(CNKI)——期刊检索
检索式及检索结果检索项:关键词、篇名
检索式:电动汽车and(四轮转向or 全方位转向)and(四轮独立驱动or 四轮驱动)
匹配:精确
检索结果:3条记录(如右图)
信息类型专利
检索工具中国期刊网——专利检索
检索式及检索结果检索项:专利名称、摘要
检索式:电动汽车and(四轮独立转向or四轮转向)and(四轮独立驱动or四轮驱动)
匹配:精确
检索结果:0条记录(如右图)
检索项:专利名称、摘要
检索式:电动汽车and(四轮独立转向or四轮转向)
匹配:精确
检索结果:4条记录(如右图)
检索项:专利名称、摘要
检索式:电动汽车and(四轮独立驱动or四轮驱动)
匹配:精确
检索结果:24条记录(如右图)
检索工具
中国知识产权网
(/)
检索式及检索结果检索项:名称、摘要
检索式:((名称=(电动汽车)) and 摘要=((四轮独立转向 or 四轮转向) and (四轮独立驱动 or 四轮驱动))检索结果:0条记录(如右图)
检索项:名称、摘要
检索式:名称=(电动汽车) and 摘要=(四轮独立转向 or 四轮转向)
检索结果:4条记录(如右图)
检索项:名称、摘要
检索式:名称=(电动汽车) and 摘要=(四轮独立驱动 or 四轮驱动)
检索结果:26条记录(如右图)
检索工具
国家知识产权局——专利检索
(/zljs/)
检索式及检索结果检索项:名称、摘要
((名称=(电动汽车)) and 摘要=((四轮独立转向 or 四轮转向) and (四轮独立驱动 or 四轮驱动))
检索结果:0条记录(如右图)
检索项:名称、摘要
检索式:名称=(电动汽车) and 摘要=(四轮独立转向 or 四轮转向)
检索结果:4条记录(如右图)
检索项:名称、摘要
检索式:名称=(电动汽车) and 摘要=(四轮独立驱动 or 四轮驱动)
检索结果:24条记录(如右图)
检索工具百度专利检索
检索式及检索结果检索项:全文
检索式:四轮独立转向四轮驱动电动汽车
检索结果:如右图(挑选相关的?系统不会自动按相关度)
信息调研详表
信息类型标准
检索工具万方数据库(镜像站点)
检索式及检索结果检索项:关键词
检索式:电动汽车
检索结果:6条记录(如右图)
检索工具中国标准服务网
检索式及检索结果检索项:关键词
检索式:电动汽车四轮转向四轮驱动
国际标准分类:道路车辆工程
检索结果:如右图
检索项:关键词
检索式:电动汽车四轮转向
国际标准分类:道路车辆工程
检索结果:如右图
检索项:关键词
检索式:电动汽车四轮驱动
国际标准分类:道路车辆工程
检索结果:如右图
检索项:关键词
检索式:电动汽车驱动
国际标准分类:道路车辆工程
检索结果:如右图
信息调研详表信息类型网络信息
检索工具Google学术搜索
检索式及检索结果检索项:搜索所有网页
检索式:四轮独立转向四轮驱动电动汽车
检索结果:如右图
检索工具百度文库
检索式及检索结果检索项:全部
检索式:四轮独立转向四轮驱动电动汽车
检索结果:如右图。