四轮驱动电动汽车驱动方式控制系统设计
- 格式:doc
- 大小:97.00 KB
- 文档页数:8
毕业设计(论文)开题报告题目:四驱越野车主传动装置结构设计参考文献[1] 杨立成,刘广森.全时四驱越野车新型传动系统[J].百科之窗,2011(7):24-25.[2] 孟文阁.四轮驱动汽车的工作特性研究[J].科技与经济,2006,36(4):57-58.[3] 杨立成,刘广森.淇林全时四驱系统—新型全时四驱技术[J].百科之窗,2011(9):25.[4] 赵治国,顾君,余卓平.四轮驱动混合动力轿车驱动防滑控制研究[J].机械工程学报,2011,47(14):83-98.[5] 本刊编辑部.莫让浮云遮望眼—越野车四驱技术[J].汽车与安全,2011(4):29-31.[6] 关大勇.四轮驱动汽车的机构特点及合理使用[J].农机使用与维修,2012(1):66.[7] 杨立贵,周毅.四轮驱动汽车新型动力传动技术[J].百科之窗,2011(6):24-25.[8] 胡建军,王银,秦大同等.基于轴间转矩分配的四轮驱动汽车牵引力控制[J].华南理工大学学报,2010,38(1):108-112.[9] 李明成.四轮驱动胸的结构特点及故障检修[J].汽车维修与保养,2013,(10):57-59.[10] 戚烈.车辆四轮驱动系统研究及仿真分析[D].辽宁:西北农林科技大学,2011.[11] 吴乙万,付苗苗,陈广.菱形四轮驱动汽车动力传动系统的设计与研究[J].计算机仿真,2010,27(2):286-289.[12] 叶斌,王洪军,王丹.齿形链传动在汽车变速箱及分动箱中的应用[J].机械传动,2012,(1):14-16.[13]蒋振江.四轮独立驱动电动汽车驱动控制策略的研究[D].重庆:重庆理工大学,2012,4.[14] 赵治国,何宁,朱阳等.四轮驱动混合动力轿车驱动模式切换控制[J].机械工程学报 ,2011,47(4):100-109.[15] 王贵明,王金懿.四轮驱动四轮转向的汽车电子差速转向控制[J].变频器世界,2011,(2):48-51.[16]QIZh-i quan,MA Yue-feng, LIU Zhao-du. Estimation of Vehicle Speed Based on WheelSpeeds from ASR System in Four-Wheel Drive Vehicles[J].Journal of Beijing Institute ofTechnology,2010,19(2):153-157[17]CHEN S-i zhong,SHU Jin, Y ANG Lin. Research on Vehicle Control Technology usingFour-Wheel Independent Steering System[J].Journal of Beijing Instiute of Technology,2006,15(1):22-26.[18] CHEN Ning,CHEN Nan, CHEN Yan-dong.On fractional control method for four-wheel-steering vehicle[J]. Science in China(Series E:Technological Sciences),2009,52(3):603-609.。
第四章电控驱动防滑/牵引力控制系统(ASR/TRC)一、教学目的和基本要求通过此章内容的教学,让学生了解ASR的理论基础、ASR控制的方式、ASR 与ABS的区别;掌握ASR的结构与工作原理及典型车型的ASR结构组成和工作过程;了解防滑差速器的作用、形式以及四轮驱动防滑差速器的基本结构和工作原理。
二、教学内容及课时安排第一节概述、第二节ASR的结构与工作原理理论教学:1学时。
第三节典型ASR 理论教学:2学时。
第四节防滑差速器的结构原理理论教学:1学时。
三、教学重点及难点重点:ASR的理论基础;ASR的结构与工作原理。
难点:丰田ABS/TRC液压系统的工作情况及控制电路。
四、教学基本方法和教学过程此内容采用理实一体化教学方法,对ASR及典型车型ABS/TRC的结构原理的授课采用先理论后实践的方法。
五、作业1.ASR的理论基础2.ASR与ABS的区别3.ASR的结构与工作原理4.防滑差速器的作用5.典型车型的A BS/TRC液压系统的控制方式第四章电控驱动防滑/牵引力控制系统(ASR/TRC)第一节概述一、ASR系统的理论基础1.ASR系统的理论基础汽车驱动防滑控制(Anti Slip Reguliation)系统简称ASR,是应用于车轮防滑的电子控制系统。
汽车打滑是指汽车车轮的滑转,车轮的滑转率又称滑移率。
驱动车轮的滑移率S d=×100%,式中v c是车轮圆周速度;v是车身瞬时速度。
滑移率与纵向附着系数的关系如图5-1所示。
2.ASR与ABS的区别(1)ABS是防止制动时车轮抱死滑移,提高制动效果,确保制动安全;ASR (TRC)则是防止驱动车轮原地不动而不停的滑转,提高汽车起步、加速及滑溜路面行驶时的牵引力,确保行驶稳定性。
(2)ABS对所有车轮起作用,控制其滑移率;而ASR只对驱动车轮起制动控制作用。
(3)ABS是在制动时,车轮出现抱死情况下起控制作用,在车速很低(小于8km/h)时不起作用;而ASR则是在整个行驶过程中都工作,在车轮出现滑转时起作用,当车速很高(80~120 km/h)时不起作用。
纯电动汽车牵引力控制系统(TCS)的研究与开发王姝;蹇小平;张凯;刘浩丰【摘要】A traction control system (TCS) controler was designed for a pure electric vehicle with an unopened source motor using its software to meet anti-slip function requirements by selecting a MC9S12XS128 microcontroler (MCU). The hardware circuits were designed for main system, power system, signal conditioning, accelerator pedal signal colection, CAN (controler area network) bus colection, and the output system. The TCS had four modules for starting, running, braking, and fault monitoring. TCS control strategies were developed for different operating conditions. The function veriifcation test was completed for the four modules. The results show that the TCS controler works wel, and can limit the slip trend at about 10% effectively. Therefore, the controler can ensure vehicle safety and meet the anti-slip control requirements.%提出了一种用于纯电动汽车的牵引力系统(TCS)控制器。
电动汽车轮毂电机的特点
1.一体化设计:电动汽车轮毂电机将电机与轮毂结构进行一体化设计,使得电机和传动系统组成紧凑的整体,减少了传动部件的数量和体积,提
高了整车的空间利用率。
2.高效能:电动汽车轮毂电机采用无需传动的直接驱动方式,无需通
过传动装置将电能转化为机械能,可以实现高效能的转换。
相比传统的内
燃机驱动系统,电动汽车轮毂电机的能量利用率更高,能够大幅度提高车
辆的瞬时加速性能。
3.节能环保:由于电动汽车轮毂电机无需借助传统的内燃机来驱动,
可以减少对石油资源的依赖,减少碳排放和污染物的排放,实现能源的可
持续利用。
同时,电动汽车轮毂电机在制动过程中可以通过回收制动能量
来充电,提高了整车能量利用效率。
4.简化传动系统:电动汽车轮毂电机无需传动装置,可实现全时四轮
驱动和电子差速的功能,简化了传动系统的结构。
同时,由于电动汽车轮
毂电机可以实现逐轮独立的控制,可以更灵活地调整每个轮子的扭矩分配,提高了车辆的操控性和稳定性。
5.噪音低:电动汽车轮毂电机的直接驱动方式使得车辆在行驶过程中
摩擦和机械噪音减少,车内噪声水平更低,提高了行车的舒适性。
6.维护成本低:电动汽车轮毂电机的结构相对简单,无需传统的润滑
油和传统发动机的维护保养,减少了维修成本和保养周期。
7.动力分配灵活:电动汽车轮毂电机可以实现轮子间的扭矩分配,可
以根据路况和驾驶需求对每个轮子的动力进行精确控制,提高了车辆的操
控性和稳定性。
8.制动能量回收:电动汽车轮毂电机可以在制动过程中向电池回收能量,提高了整车的能量利用效率,减少了对制动器的磨损,延长了制动器的使用寿命。
全轮驱动时代AWD轿车的发展及构造(图) 2005年04月07日 18:08 汽车之友ESC、TCS通过控制发动机动力输出和制动系统来保证平稳驾驶,以损失动力作为安全保证以防止超越物理极限;AWD控制并调整每个车轮的扭矩输出,在不干涉发动机动力输出的情况下提高了物理极限,保证你全天候的驾驶乐趣奥迪Quattro AWD诞生于1980年,当年奥迪的设计师声称:“早晚有一天,AWD 会像今天4轮盘式刹车一样流行。
”果不其然,今天奥迪用AWD武装了它的每一款车型,而各大厂商也在纷纷加入AWD行列。
车辆的驱动型式有FWD (Front-Wheel Drive)、RWD( Rear-Wheel Drive)、4WD(Four-Wheel Drive)和AWD(All-Wheel Drive)。
我们先来看看这几种驱动型式。
前轮驱动(FWD):今天占轿车产品的70%的经济型及中级轿车都采用了前轮驱动。
就像名字所暗示的,只有前轮传递动力。
安装在前部的发动机将动力直接传输到前轮,提高了牵引效率,60%~70%的重量集中在轿车前部,提供了更好的冰雪稳定性,但前轮要承受75%的制动,而且在急加速时车身重心后移,就会造成加速延迟,在操控上也存在着转向过度和后轮打滑现象。
后轮驱动(RWD):豪华轿车通常采用后驱,重量分配接近于50∶50,提供了更平稳的驾驶。
RWD与FWD驱动情况正相反,操控性能有所提高。
当加速时车身重心向后转移,这正是你所希望的,因为后轮主管牵引力,前轮主管汽车方向。
你还可以在弯道加速。
这并不是说RWD在结构上就好,它也存在缺陷,如从前到后的传动轴(使车内地板从前到后隆起),还有一个很大的差速器在后部,增加了重量和成本,它同样不适应全天候驾驶。
以上两种车型都是只使用了两个车轮传递动力,为什么不同时使用另两个车轮?四轮驱动就是使用了4个车轮传递动力,它又分为4WD和AWD两种形式。
4WD是为了增加牵引力,在不顺利的道路条件下或是追求极限性能驾驶,是专为越野设计的。
四轮驱动结合四轮转向的电子差速计算式推导电子差速系统(EDS,ElectronicDifferentialSystem)是采用电子控制方式来实现内外侧驱动轮差速要求。
而其实施首先需要一套正确易算的差速计算公式。
通过对四轮驱动4WD与四轮转向4WS相结合的运行机理分析,在此提出仅利用中学的三角函数结合比例法数学工具来推导出其4WD-4WS的逆、同相控制模式的差速计算公式。
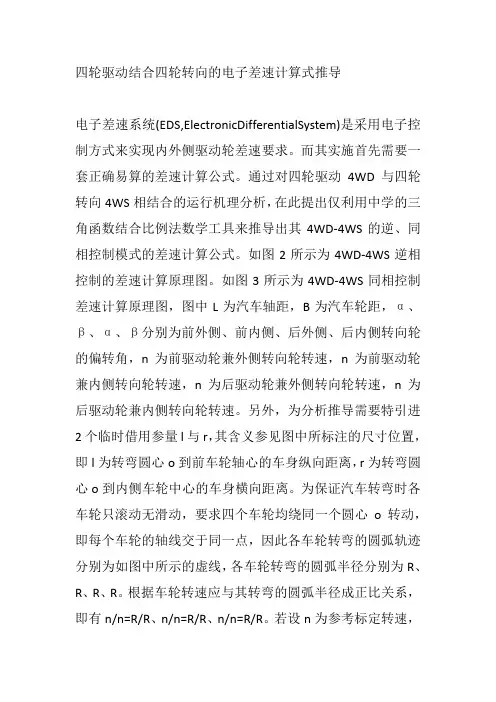
如图2所示为4WD-4WS逆相控制的差速计算原理图。
如图3所示为4WD-4WS同相控制差速计算原理图,图中L为汽车轴距,B为汽车轮距,α、β、α、β分别为前外侧、前内侧、后外侧、后内侧转向轮的偏转角,n为前驱动轮兼外侧转向轮转速,n为前驱动轮兼内侧转向轮转速,n为后驱动轮兼外侧转向轮转速,n为后驱动轮兼内侧转向轮转速。
另外,为分析推导需要特引进2个临时借用参量l与r,其含义参见图中所标注的尺寸位置,即l为转弯圆心o到前车轮轴心的车身纵向距离,r为转弯圆心o到内侧车轮中心的车身横向距离。
为保证汽车转弯时各车轮只滚动无滑动,要求四个车轮均绕同一个圆心o转动,即每个车轮的轴线交于同一点,因此各车轮转弯的圆弧轨迹分别为如图中所示的虚线,各车轮转弯的圆弧半径分别为R、R、R、R。
根据车轮转速应与其转弯的圆弧半径成正比关系,即有n/n=R/R、n/n=R/R、n/n=R/R。
若设n为参考标定转速,它与加速踏板指令汽车的车速n一致,也是四只车轮中最高的转速,分析图示几何关系即可获得其它三只车轮转速相对标定转速n的计算式,且经推导后发现逆相控制模式与同相控制模式的差速计算公式完全相同,即其他三只车轮转速n、n、n相对标定转速n的差速计算公式分别为:从推导过程中还可发现同、逆相控制模式中的两个重要特征:(1)参考图2所示,在四轮转向逆相控制模式中当前后轮转向角相等(α=α,β=β)时,其转弯半径为最小。
并且它与常规的前二轮转向系统2WS相比,在转向轮转向角相同的前提下,其转弯半径可减小一半。
NO.667目前行业内对于电机架构的应用方式各有不同,对于不同架构下的具体应用和解释也略有不同,本文的出发点是梳理p0-p4架构的基本原理以及应用方式,以及不同组合方案的目的。
●P0-P4电机的定义与解析在混合动力汽车中,按电机位置的不同可分为P0-P4和Ps架构,其中P代表电机位置(Position),不同位置的电机扮演着不同的角色,发挥的作用与车辆能耗、动力性有直接关系,到底哪款混合动力车型更适合你呢?◆P0架构:结构简单、成名早P0架构的电机安装在发动机前端,其通过皮带与发动机曲轴相连,搭载P0电机的车型可以做到在等红绿灯发动机停机的时候带动空调的机械压缩机运转,实现发动机启停、制动能量回收发电,以及辅助动力输出。
『博世48V MHEV系统』P0架构的技术和结构比较简单,应用也相对广泛,许多司机朋友上车就关闭的自动启停系统就是典型的P0架构,而自动启停的历史可以追溯到上世纪70年代。
与配备自动启停功能的车型相比,P0架构采用较大功率的BSG (Belt-driven Starter/Generator;皮带传动启动/发电一体化电机)电机,并配备了一块容量更大的电池,能够胜任带动压缩机与辅助发动机运转的工作。
在发动机停机时,P0电机能够单独带动空调压缩机工作,减少发动机的怠速时间;车辆起步或加速时,P0电机能够辅助发动机运转,帮助发动机快速摆脱低效工作区间,节油的同时能有效提升驾乘质感。
因为P0电机通过串联的方式将动力传递给车轮,所以电机没法撇开发动机单独驱动车轮,也就没有纯电行驶模式。
另外,由于P0电机通过皮带与曲轴柔性连接,所以给发动机加力、回收动能功率的天花板较低。
奥迪SQ7 TDI和马自达i-Eloop弱混系统属于P0架构,由于P0架构传递效率较低、电机无法直驱车轮,在新能源车领域P0电机通常以辅助的身份出现,后文会有相应的解析和案例。
◆P1架构:单独开发/高度集成P1架构的电机位于发动机曲轴后端,它取代了传统的飞轮,在继承飞轮储存发动机做功冲程外的能量和惯性的功能外,P1电机与P0电机功能相似,同样支持发动机启停、制动能量回收发电、辅助动力输出。
![四驱车多片离合差速传动与控制[宝典]](https://uimg.taocdn.com/e1ccf21bc8d376eeafaa31da.webp)
四驱车多片离合差速传动与控制[宝典] 四驱车多片离合差速传动与控制一(四驱系统四驱系统一般分为:全时四驱、分时四驱和适时四驱。
全时四驱指的是车辆在整个行驶过程中一直保持四轮驱动的模式。
这种驱动模式拥有较好的越野和操控性能,但它不能根据路面情况做出扭矩分配的调整,油耗偏大,经济性差。
分时四驱是由驾驶者手动切换的驱动模式,驾驶者可通过接通或断开分动器来选择两轮驱动或四轮驱动模式。
这是SUV车型中最常见的驱动模式,其优点是既能保证车辆的动力性和通过性,又能兼顾燃油经济性,略显不足的是驾驶者需要自行判断路况,手动操作驱动模式。
适时四驱又称为实时四驱,是最近几年发展起来的技术,它由电脑芯片控制两驱与四驱的切换。
该系统的显著特点就是它在继承全时四驱和分时四驱的优点的同时弥补了它们的不足。
它能自行识别驾驶环境,根据驾驶环境的变化控制两驱与四驱两种模式的切换。
在颠簸、多坡多弯等附着力低的路面,车辆自动设定为四轮驱动模式,而在城市路面等较平坦的路况上,车辆会自行切换为两轮驱动。
二.多片离合器式差速器多片离合器式差速器依靠湿式多片离合器产生差动转矩。
这种系统多用作适时四驱系统的中央差速器使用。
其内部有两组摩擦盘,一组为主动盘,一组为从动盘。
主动盘与前轴连接,从动盘与后轴连接。
两组盘片被浸泡在专用油中,二者的结合和分离依靠电子系统控制。
在直线行驶时,前后轴的转速相同,主动盘与从动盘之间没有转速差,此时盘片分离,车辆基本处于前驱或后驱状态,可达到节省燃油的目的。
在转弯过程中,前后轴出现转速差,主、从动盘片之间也产生转速差。
但由于转速差没有达到电子系统预设的要求,因而两组盘片依然处于分离状态,此时车辆转向不受影响。
图1 前、后轴之间的多片离合器式差速器-模型图当前后轴的转速差超过一定限度,例如前轮开始打滑,电控系统会控制液压机构将多片离合器压紧,此时主动盘与从动盘开始发生接触,类似离合器的结合,扭矩从主动盘传递到从动盘上从而实现四驱。
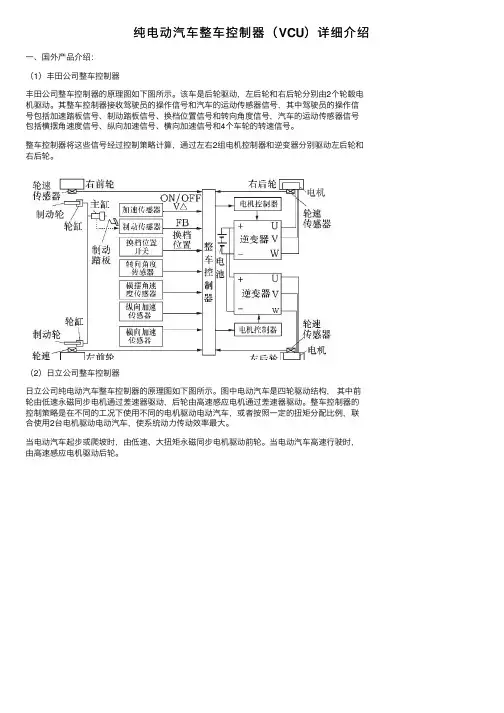
纯电动汽车整车控制器(VCU)详细介绍⼀、国外产品介绍:(1)丰⽥公司整车控制器丰⽥公司整车控制器的原理图如下图所⽰。
该车是后轮驱动,左后轮和右后轮分别由2个轮毂电机驱动。
其整车控制器接收驾驶员的操作信号和汽车的运动传感器信号,其中驾驶员的操作信号包括加速踏板信号、制动踏板信号、换档位置信号和转向⾓度信号,汽车的运动传感器信号包括横摆⾓速度信号、纵向加速信号、横向加速信号和4个车轮的转速信号。
整车控制器将这些信号经过控制策略计算,通过左右2组电机控制器和逆变器分别驱动左后轮和右后轮。
(2)⽇⽴公司整车控制器⽇⽴公司纯电动汽车整车控制器的原理图如下图所⽰。
图中电动汽车是四轮驱动结构,其中前轮由低速永磁同步电机通过差速器驱动,后轮由⾼速感应电机通过差速器驱动。
整车控制器的控制策略是在不同的⼯况下使⽤不同的电机驱动电动汽车,或者按照⼀定的扭矩分配⽐例,联合使⽤2台电机驱动电动汽车,使系统动⼒传动效率最⼤。
当电动汽车起步或爬坡时,由低速、⼤扭矩永磁同步电机驱动前轮。
当电动汽车⾼速⾏驶时,由⾼速感应电机驱动后轮。
(3)⽇产公司整车控制器⽇产聆风LEAF是5门5座纯电动轿车,搭载锂离⼦电池,续驶⾥程是160km。
采⽤200V家⽤交流电,⼤约需要8h可以将电池充满;快速充电需要10min,可提供其⾏驶50km的⽤电量。
⽇产聆风LEAF的整车控制器原理图如下图所⽰,它接收来⾃组合仪表的车速传感器和加速踏板位置传感器的电⼦信号,通过⼦控制器控制直流电压变换器DC/DC、车灯、除霜系统、空调、电机、发电机、动⼒电池、太阳能电池、再⽣制动系统。
(4)英飞凌新能源汽车VCU & HCU解决⽅案该控制器可兼容12V及24V两种供电环境,可⽤于新能源乘⽤车、商⽤车电控系统,作为整车控制器或混合动⼒控制器。
该控制器对新能源汽车动⼒链的各个环节进⾏管理、协调和监控,以提⾼整车能量利⽤效率,确保安全性和可靠性。
该整车控制器采集司机驾驶信号,通过CAN总线获得电机和电池系统的相关信息,进⾏分析和运算,通过CAN总线给出电机控制和电池管理指令,实现整车驱动控制、能量优化控制和制动回馈控制。
农业装备与车辆工程2015年基金项目:国家自然科学基金青年基金资助项目(51305190);辽宁省教育厅项目(L2013253)收稿日期:2015-03-30修回日期:2015-04-12doi :10.3969/j.issn.1673-3142.2015.07.002基于CarSim 的四轮轮毂电机电动汽车建模方法研究马高峰,李刚,韩海兰(121001辽宁省锦州市辽宁工业大学汽车与交通工程学院)[摘要]针对四轮轮毂电机电动汽车控制算法验证需要,基于CarSim 和Simulink 搭建了四轮轮毂电机电动汽车模型。
将CarSim 传统内燃机汽车模型修改为四轮独立驱动汽车模型,应用Simulink 搭建电机模型,进行CarSim 和Simulink 联合仿真建立四轮轮毂电机电动汽车模型,并通过仿真实验对模型进行了验证。
验证表明,电机模型和电动汽车模型均具有良好的响应特性,模型搭建合理;该模型为以后控制算法的研究奠定了良好基础。
[关键词]轮毂电机;电动汽车;CarSim ;Matlab/Simulink ;建模仿真[中图分类号]U469.72[文献标志码]A[文章编号]1673-3142(2015)07-0008-04Simulation Model Research for Four-wheel Hub Motor Electric Vehicle Based on Simulink and CarSimMa Gaofeng ,Li Gang ,Han Hailan(Automobile and Traffic Engineering College ,Liaoning University of Technology ,Jinzhou City ,Liaoning Province 121001,China )[Abstract ]For the need of verifying the four-wheel hub motor electric vehicle control algorithm research ,with CarSim andMatlab /Simulink ,a four-wheel hub motor electric vehicle model was established.Traditional combustion engines vehicle model was altered to four-wheel-drive electric vehicle model by CarSim ,electrical machine was developed based on Matlab /Simulink.Four-wheel hub motor electric vehicle model was established with Matlab /Simulink and CarSim ,and the model was verified by simulation experiment.The results show that the electrical machine and electric vehicle model have good response characteris-tics ,the model is rational ,which can be used as a good platform for the control algorithm improvements and validation.[Key words ]hub motor ;electric vehicle ;CarSim ;Matlab /Simulink ;modeling and simulation0引言目前,环保和节能的问题备受关注。
关于四驱技术特点的描述中-概述说明以及解释1.引言1.1 概述四驱技术是指车辆通过四个车轮驱动力来提供动力的一种技术。
相比于普通的两驱车辆,四驱技术具有更强的抓地力和稳定性,在各种路况下表现更出色。
四驱技术广泛应用于越野车、SUV以及高性能轿车等车型中,为驾驶者带来更好的操控感和驾驶体验。
四驱技术的优势主要在于其出色的操控性和车辆动力的平衡性。
通过四个车轮分别提供驱动力,四驱车辆能够更好地适应各种复杂路况,如雨雪、泥泞或崎岖山路等。
这是因为四驱车辆可以通过调节四个车轮的扭矩分配,将动力传递给抓地能力较好的车轮,从而提高车辆的牵引力和通过能力。
此外,四驱技术还可以提升车辆的稳定性和操控性。
在高速行驶或急转弯时,四驱车辆能够更好地分配车辆的重量,保持车辆的平衡状态,提高行驶的稳定性。
同时,四驱技术还能够提供更大的侧向抓地力,减少车辆在转弯时的侧滑风险,使驾驶者更有信心和掌控力。
总而言之,四驱技术通过四个车轮的驱动力分配和调节,能够提供更好的抓地力、稳定性和性能操控,成为越野车、SUV以及高性能轿车等车型中的重要技术。
未来,随着科技的不断进步,四驱技术还有望进一步完善和创新,为驾驶者提供更卓越的驾驶体验。
1.2文章结构文章结构部分描述了整篇文章的组织和内容安排。
在本篇长文中,文章结构可以按照以下方式进行描述:文章结构部分:本文将按照以下结构来展开对四驱技术特点的描述:1. 引言部分1.1 概述:对四驱技术进行简要介绍,说明其在汽车行业中的重要性和应用范围。
1.2 文章结构:介绍本文的组织结构和内容安排,包括各个章节的主题和要点。
1.3 目的:明确本文的写作目的,阐述作者对四驱技术特点描述的目标和意义。
2. 正文部分2.1 四驱技术的定义:详细解释四驱技术的概念和定义,并介绍其基本原理和工作方式。
2.2 四驱技术的优势:探讨四驱技术的优势和特点,包括增强车辆驱动力和操控性、提高行驶稳定性和通过性等方面。
论述四轮驱动的形式和特点(三级)一、什么是四轮驱动?说到四轮驱动,总能使人们想起那些身材魁梧、威猛超群的越野车。
的确,四轮驱动的出现就是为了针对恶劣路况,征服那些两只车轮无法通过的险峻地形。
最初,四轮驱动是纯种越野车的专门配备。
但随着汽车工业的发展,以及人们对于汽车文化更加深入的认识,四驱车型通过性、爬坡性、转弯性能、启动和加速性能以及直线行驶性能都有较高的提升,虽说结构复杂、重量增加、成本升高、震动和噪音略有升高、油耗增加,但越来越多的车辆采用了四轮驱动系统。
四轮驱动,顾名思义是指汽车前后轮都有动力驱动,可以按照行驶路面状态的不同而将发动机输出扭矩按不同比例分布在前后所有的轮子上,遇到路况不好才不易出现车轮打滑,汽车的通过能力得到相当大地改善:对SUV、越野车来说,能提高越野路况的通过能力,而对轿车来说,则主要提高弯道的操控性能。
四轮驱动一般用4×4或者4WD来表示,注明这些符号的汽车就是有四轮驱动的功能。
二、为什么很多车辆需要四轮驱动呢?根本原因就在于,通常情况下四轮驱动比起两轮驱动,具有更高的通过性能,也就是指车辆通过复杂地形的能力。
当车辆行驶于复杂路况时,对于一辆普通的两驱车来说,一旦两个驱动轮中的任何一个车轮无论何种原因而失去行驶附着力的话,理论上讲,在不借助任何外力的情况下,车辆将无法继续前进。
车辆进行直线行驶时,两侧车轮的行驶距离是完全相同的,并无转速差异。
但在转弯时,如果继续保持这种行驶状态,将会对车辆造成严重的损伤,并且无法顺利通过弯道,原因是,车辆在弯道行驶时,外侧车轮行驶的距离要大于内侧车轮,由于通过的时间相等,所以两侧车轮之间存在转速差,所以不能采用刚性连接。
差速器的出现巧妙地解决了这一问题,差速器的差速原理是:弯道行驶时,车辆两侧驱动轮所受到的转动阻力是不同的,差速器的实际功能就在于消除两侧车轮的阻力差,也就是说,只有两侧驱动轮出现阻力差,差速器才会工作,并且差速器的“差速程度”与“阻力差”是成正比的。
电动汽车传动系统的工作原理电动汽车,这个词听起来就像未来科技的代名词,仿佛一打开车门,宇宙飞船就要起飞一样。
不过,今天我们要聊的可不是科幻电影,而是真真切切的电动汽车传动系统。
想象一下,坐在车里,轻轻一踩油门,车子就像吃了兴奋剂一样飞驰而出,没错,这个神奇的过程全靠它的传动系统。
那么,这个传动系统到底是个啥呢?1. 电动汽车传动系统的基本构造电动汽车的传动系统其实没有那么复杂,简单来说,它就是把电能转化为动能的一套设备。
我们先从最基础的开始说起。
电动汽车的心脏,就是它的电动机。
想象一下,这就像是汽车的“马达”,负责驱动汽车前进。
电动机的好处是,响应速度快,转速高,可以随时随地提供动力,不用再像传统汽车那样忍受发动机转速上升的漫长等待。
接下来,我们来聊聊电池。
电池就像是电动汽车的“血液”,没有它,电动机就无法工作。
现在的电池一般都是锂电池,轻巧又能量大,能让你在市区开一天都不成问题。
再加上充电设施逐渐完善,你完全可以不必担心电量告急的窘境。
1.1 电动机的工作原理电动机的工作原理其实挺简单的。
它通过电流产生磁场,然后利用磁场的作用力来驱动转子转动。
你可以想象成一对好朋友,在操场上互相推拉,最终就形成了动力。
电动机的转速与电流的大小直接相关,所以,只要你踩下油门,电流立刻增大,转速自然也跟着上升。
1.2 变速系统的作用不过,电动汽车并不是只有电动机这么简单。
这里还得提到变速系统。
虽然很多电动汽车只用单速变速箱,听起来就像是“懒人”的选择,但这恰恰是电动汽车的聪明之处。
由于电动机的转速范围宽广,所以一个档位就足够应对各种驾驶需求。
不过,如果你想体验一下像赛车一样的速度,变速系统还是能给你带来一些不同的感觉。
2. 驱动方式的多样性说到电动汽车的传动系统,就不能不提到它的驱动方式。
电动汽车的驱动方式一般分为前驱、后驱和四轮驱动。
前驱就是发动机在前面,车轮也在前面,像小猫一样灵活,适合城市驾驶;后驱则是在后面发力,更适合那些喜欢漂移的朋友们;而四轮驱动则是无敌模式,适合越野和复杂路况,像极了在玩游戏时开启了无敌外挂。
四轮驱动电动汽车驱动方式控制系统设计 四轮驱动电动汽车驱动方式控制系统设计 摘要 作为电动汽车行业新颖的发展方向,四轮驱动电动汽车由于其理想的控制特性和良好的应用前景,受到学术和工程界的普遍关注,已经成为研究热点。首先,根据整车参数和动力性的要求,计算出电机的功率、转速等主要指标,选定轮毂式无刷直流电机型号并进行简单的动力匹配。再根据不同工况,选择适合电动汽车的驱动方式,构建四轮独立驱动电动车的驱动方式控制的系统模型。其次,根据电动汽车行驶路面的路况和所处的工况,采用一定的控制策略和驱动策略,由切换电动机的工作状态,使电动汽车既可以在不同的工况(例如启动、爬坡及转弯)选择适应的驱动方式,又可以在不同等级的路面下(例如城市路面、高速公路)选择最佳的驱动方式,即做到电动汽车的即时四驱,从而最大程度地发挥电动汽车驱动方式控制的优点。最后,本文通过建立数学模型,并利用matlab进行软件仿真,来对轮毂电机驱动力模型、整车模型以及控制策略模型这些模型进行仿真试验。以上研究表明:四轮驱动是一种理想可行的驱动方案;本文建立的仿真模型合理实用。
关键词:四轮驱动;驱动方式控制;不同工况;轮毂式无刷直流电机 四轮驱动电动汽车驱动方式控制系统设计 DESIGN OF DRIVING FORMS CONTROL SYSTEM OF FOUR-WHEEL DRIVE ELECTRIC VEHICLE
ABSTRACT The four-wheel drive(4WD) EV is one of the developing directions for further EV. Because of its perfect controlling performance and good application prospect in engineering, 4WD EV have been getting universal attention by both academicians and engineers.It also has become a research hotspot of research.Firstly,according to the requirements of the vehicle parameters and power performance,we need to calculate main indicators such as the motor power, rotational speed, and select the model for wheel-hub brushless DC motor. According to different working condition, we should choose suitable driving forms for EV, and build up the model of driving control system about four-wheel independent drive EV.Then,according to EV working condition of pavement, we need to adopt certain control strategy and drive strategy.By switching the working state of the motor, 4WD EV can not only work in different conditions (such as starting, climbing and turning) to choose adapted drive forms, but also under different levels of the road (such as urban roads, highways) to choose the best way of driving.Which achieve the real-time four-wheel drive for EV, so as to maximize the advantages of EV driving forms control.Finally,by establishing the mathematical models and using MATLAB to simulation,we can set up the simulation models for driving force models of wheel-hub motor, vehicle models and control strategy models. Above research shows that the 4WD is a kind of ideal and feasible driving form; the simulation models in this paper is reasonable and practical.
Key words:Four-wheel drive;The control of driving forms;Different working
conditions;Wheel brushless DC motor 四轮驱动电动汽车驱动方式控制系统设计 目 录 1 绪论.............................................................. 5 1.1 课题研究背景................................................................................................. 5 1.2 电动汽车国内外发展状况..............................................错误!未定义书签。 1.2.1 国外发展状况.......................................................错误!未定义书签。 1.2.2 国内发展状况.......................................................错误!未定义书签。 1.3 电动汽车驱动方式控制的研究状况..............................错误!未定义书签。 1.4 本章小结..........................................................................错误!未定义书签。 2 四轮电动汽车的驱动分析............................ 错误!未定义书签。 2.1 电动汽车的行驶阻力......................................................错误!未定义书签。 2.2 四轮电驱汽车的驱动力..................................................错误!未定义书签。 2.3 四轮电驱汽车的受力特点..............................................错误!未定义书签。 2.4 驱动电机的介绍..............................................................错误!未定义书签。 2.5 本章小结..........................................................................错误!未定义书签。 3 四轮独立驱动电动汽车驱动模型的建立................ 错误!未定义书签。 3.1 永磁无刷直流电机特性分析..........................................错误!未定义书签。 3.2 轮毂式永磁无刷直流电机模型......................................错误!未定义书签。 3.3 整车模型..........................................................................错误!未定义书签。 3.3.1 电动汽车整车动力学模型的建立.......................错误!未定义书签。 3.3.2 纵向承载横向不承载车身结构...........................错误!未定义书签。 3.3.3 整车控制策略.......................................................错误!未定义书签。 3.4 本章小结..........................................................................错误!未定义书签。 4 四轮电动汽车的驱动方式控制........................ 错误!未定义书签。 4.1 驱动工况研究..................................................................错误!未定义书签。 4.1.1 平路工况...............................................................错误!未定义书签。 4.1.2 启动工况...............................................................错误!未定义书签。