双凸极永磁电机的控制方案研究
- 格式:pdf
- 大小:264.14 KB
- 文档页数:2
设计应用技术凸极式永磁同步电机矢量控制算法研究与工程实现潘明和(中国振华电子集团贵州振华群英电器有限公司,贵州以新能源电动汽车用凸极式永磁同步电机为研究对象,根据驱动电机的实际运行工况,提出了在基速以下的恒扭矩区采用最大转矩电流比控制,基速以上的恒功率区采用弱磁控制的矢量控制策略。
通过查表法实现矢量控制,即根据电机运行工况,实时查表得到电机交、直轴电流的参考值,实现对永磁同步电机的控制。
凸极式永磁同步电机;最大转矩电流比;弱磁控制;查表法Research and Engineering Implementation of Field Oriented Control Algorithm of IPMSMPAN Minghe(Zhenhua Qunying Relay Co., Ltd., Guiyangenergy electric vehiclesoperating conditions of the drive motor, a Field Oriented Control strategy of maximum torque-current ratio control is adopted in the constant torque region below the base speed and weakened magnetic field control is used in the constant power region above the base speed. Field Oriented Control is realized by the lookup method, that is, according to the· 13 ·算和分析。
d-q 轴坐标系是随定子磁场同步旋转的运动坐标系,其d 轴的方向是永磁同步电机转子励磁磁链方向,q 轴超前d 轴 90度角。

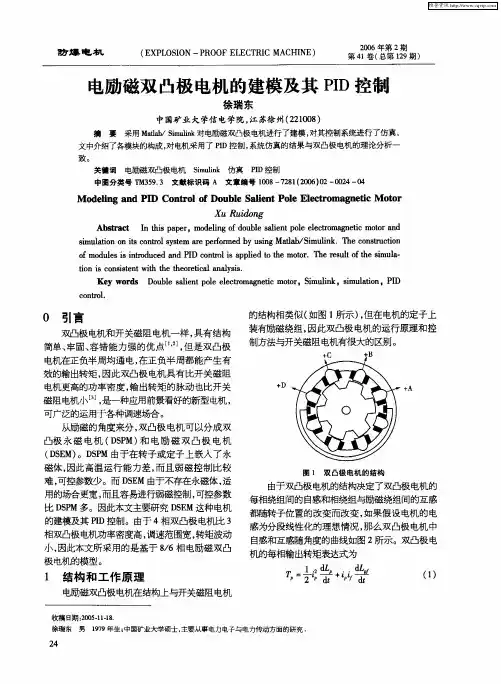
图片简介:本技术介绍了一种整距绕组双凸极永磁电机槽扭矩降低方法及系统,由于整距绕组双凸极永磁电机高空间利用率,结构紧凑,具有高扭矩密度,低扭矩波动以及坚固的特征;由于转子极宽大,产生较大而又分布不平衡的槽扭矩,槽扭矩作为电机的固有特性影响电机性能输出提升;针对该问题,通过槽扭矩计算分析,提出了圆形定子极面重构定转子气隙结构以平衡气隙中磁阻扭矩的解决方法,分析结果显示,该方法有效地降低了槽扭矩,同时消除了槽扭矩峰值分布不均匀的现象。
技术要求1.一种整距绕组双凸极永磁电机槽扭矩降低方法,其特征在于,所述方法包括如下步骤:步骤1,计算电机的槽扭矩;步骤2,通过槽扭矩根据磁路法得到气隙磁导函数;步骤3,根据气隙磁导函数构建槽扭矩控制模型;步骤4,通过控制槽扭矩控制模型将非平衡槽扭矩减小。
2.根据权利要求1所述的一种整距绕组双凸极永磁电机槽扭矩降低方法,其特征在于,在步骤1中,计算电机的槽扭矩的方法为:忽略永磁体和定转子铁芯内的能量变化将槽扭矩表示为:其中,为气隙磁能,μ0为空气磁导率,G(θ),B(θ,a)分别为相对气隙磁导函数、磁通密度和气隙长度函数;rs,rr分别为电机的定子内径子铁芯轴向长度,θ为转子位置,a为转动角度。
3.根据权利要求1所述的一种整距绕组双凸极永磁电机槽扭矩降低方法,其特征在于,在步骤2中,通过槽扭矩根据磁路法得到气隙磁导函数的方法为:将槽扭矩中的G2(θ),B2(θ,a)傅里叶展开:式中,Ns,NP分别为电机的定子槽数和转子极数,为相应的傅利叶系数,由(1)(2)(3)式,得到槽扭矩4.根据权利要求3所述的一种整距绕组双凸极永磁电机槽扭矩降低方法,其特征在于,根据磁路法得到的气隙磁导函数:其中,Rs为定子内径,g为气隙厚度。
5.根据权利要求4所述的一种整距绕组双凸极永磁电机槽扭矩降低方法,其特征在于,在步骤3中,根据气隙磁导函数构建槽扭矩控制模型的方法为:通过对气隙磁导函数进行傅里叶展开,构建槽扭矩控制模型:NL为NP和Ns的最小公倍数;ws为定子槽宽,g(θ)为气隙长度函数,(4)式显示,槽扭矩的周期为2π/NL,减小槽扭矩通过控制NL、和6.根据权利要求5所述的一种整距绕组双凸极永磁电机槽扭矩降低方法,其特征在于,在步骤4中,通过控制槽扭矩控制模型将非平衡槽扭矩减小的方法为:根据控制槽扭矩控制模型(4-2)式,为使定转子气隙变量的函数,对于的参数进行调整会影响单个定转子极对气隙中磁场分布,使得气磁阻扭矩平衡,同时保持电机的基本特性反电动势形状不变,反电动势的变化将直接影响输出扭矩的品质;在保持反电动势形状不变的情况下,径向磁通Bn之积最小,也即min(Bt·Bn),槽扭矩值和Bt·Bn成正比例关系。
双三相永磁同步电机驱动及容错控制技术研究共3篇双三相永磁同步电机驱动及容错控制技术研究1双三相永磁同步电机驱动及容错控制技术研究双三相永磁同步电机(Dual Three-Phase Permanent Magnet Synchronous Motor,DT-PMSM)是一种新型的电机,在众多应用场合中具有广泛的应用价值。
其优越的性能表现出色,具有较高的效率、较低的噪声以及更好的动态性能等优点。
且由于永磁同步电机相比于传统感应电机更加优越,因此双三相永磁同步电机的发展前景可谓十分广阔。
在应用过程中,驱动和容错控制技术是双三相永磁同步电机应用的关键环节。
对于双三相永磁同步电机的驱动,一般采用了矢量控制技术。
矢量控制技术在控制精度和效率方面表现出色。
通过通过将磁通旋转坐标系中瞬时电磁力的矢量控制将实际空间矢量转换为轴向(d轴)和横向(q轴)两个方向的矢量,实现对电机的控制。
但是,在使用中,双三相永磁同步电机遇到故障时,需要进行及时的容错控制。
如中间短路错误、绕组开路错误和电源电压波动等常见故障,如果不进行有效的容错控制,会严重影响电机的性能和寿命。
因此,在双三相永磁同步电机的应用中,容错控制技术必不可少。
容错控制技术是指在电机出现故障时,控制系统能够识别故障,使电机继续运行,并保证电机的可靠性。
这种容错控制技术需要具有快速的响应时间、准确的诊断能力和稳定的容错效果。
当前,针对双三相永磁同步电机的容错控制技术已经取得了很大的进展。
主要包括基于控制策略的容错控制、基于质量评估的容错控制和基于故障检测的容错控制等。
其中,基于控制策略和故障检测的容错控制技术被广泛应用。
总的来说,双三相永磁同步电机驱动和容错控制技术的研究一直是电机领域研究的热点之一。
而随着技术的不断进步和应用需求的不断提高,双三相永磁同步电机的驱动和容错控制技术将会得到进一步的发展和完善双三相永磁同步电机作为新型的高效电机,在工业生产和日常生活中得到了广泛的应用。
HEV用永磁双功率流双凸极电机基本原理与多工况运行模式研究的开题报告一、题目:HEV用永磁双功率流双凸极电机基本原理与多工况运行模式研究二、研究背景及意义:随着环保意识的不断提高和能源资源的日益减少,新能源汽车已经成为未来发展的必然趋势。
其中,混合动力汽车(HEV)作为当前最为成熟的技术方案之一,被广泛应用于市场。
在HEV中,电机是一个非常关键的组成部分,其性能的优劣直接影响到车辆的综合性能。
而永磁双功率流双凸极电机作为HEV中一种新型电机结构,具有结构简单、效率高等优点,已经逐渐得到了广泛的应用和研究。
本研究将以HEV用永磁双功率流双凸极电机为研究对象,围绕其基本原理与多工况运行模式展开研究。
具体内容包括:①永磁双功率流双凸极电机的结构原理分析;②电机的静态和动态特性分析;③电机的多工况运行模式研究;④电机控制策略的研究等。
通过上述研究,将为HEV电机的优化和高效运行提供理论依据和参考。
三、研究方法及步骤:1.文献调研对永磁双功率流双凸极电机的基本原理、结构、性能、控制等方面进行文献调研,掌握国内外研究现状,为后续的研究提供参考。
2.电机结构和特性分析通过建立永磁双功率流双凸极电机的数学模型,分析其结构特点和电气特性,研究其在不同工况下的性能。
3.电机多工况运行模式研究对电机在不同工况下的运行状况进行分析和研究,探究电机控制策略和控制方法,实现电机在多种工况下的高效运行。
4.系统实验针对研究结果,设计实验验证电机的性能和控制策略,进一步优化电机的性能。
四、预期成果及应用价值:本研究将深入探究HEV用永磁双功率流双凸极电机的基本原理与多工况运行模式,其预期成果包括:1.永磁双功率流双凸极电机的结构、特性分析;2.电机在不同工况下的运行模式研究;3.电机高效控制策略的研究和设计;4.系统实验数据和结果。
本研究成果将为HEV电机的优化设计和高效运行提供技术支持和理论依据,有望在新能源汽车领域实现工业化应用。
凸极永磁同步电机电流控制方法研究吉智;何凤有【摘要】对凸极永磁同步电机数学模型和4种电流控制方法进行了介绍,推导了4种电流控制方法对应的电流相角控制条件,并且根据数学模型和相角控制条件建立了用于永磁同步电机电流控制算法研究的仿真模型、在此基础上,深入研究了不同负载和转速条件下,电机应用不同电流控制方法的输出转矩、端电压、功率因数、去磁因数和效率,在比较各种方法特点的基础上,指出了4种电流控制方法的适用领域.%The mathematic model for salient pole permanent magnet synchronous motor as well as four types of current control methods were introduced, which facilitated the deduction of four respective current phase control conditions. According to these,a simulation model was established to study current control methods for permanent magnet synchronous motor. Many parameters such as the output torque, voltage, power factor, demagnetizing coefficient and efficiency as well under different loads and speed conditions were deeply investigated. With these encouraging results we compared the characteristics of each methods and attempted to point out the application scope of these four current control methods.【期刊名称】《电气传动》【年(卷),期】2011(041)007【总页数】6页(P3-7,24)【关键词】永磁同步电动机;电流控制;矢量控制;仿真【作者】吉智;何凤有【作者单位】中国矿业大学,信息与电气工程学院,江苏,徐州,221008;中国矿业大学,信息与电气工程学院,江苏,徐州,221008【正文语种】中文【中图分类】TM3511 引言凸极永磁同步电机(salient pole permanent magnet synchronous motor,以下简称SPPMSM)具有d轴和q轴电感不相等的特性,其转子形式包括插入式和内装式2种[1]。
双凸极永磁电机的设计、控制和运行(Ⅰ)
林明耀;程明
【期刊名称】《微特电机》
【年(卷),期】2003(31)2
【摘要】阐述了双凸极永磁电机的设计和性能分析方法,介绍了该种电机的结构特点、工作原理和静态特性,给出了其设计特点.
【总页数】4页(P7-9,30)
【作者】林明耀;程明
【作者单位】东南大学,江苏南京,210096;东南大学,江苏南京,210096
【正文语种】中文
【中图分类】TM33
【相关文献】
1.双凸极永磁电机斜极转子设计和绕组换流模式研究 [J], 李永斌;龚宇;江建中
2.双凸极永磁电机的设计、控制和运行(Ⅱ) [J], 林明耀;程明
3.基于改进鲍威尔法的6/4极双凸极永磁电机的优化设计 [J], 屠文东
4.新型12/8极双凸极变速永磁电机的设计与分析 [J], 林明耀;程明;周鹗
5.双凸极永磁电机信号控制系统设计与应用 [J], 刘明纲
因版权原因,仅展示原文概要,查看原文内容请购买。
新型双凸极电机及转矩脉动抑制技术一、引言电机是现代工业中不可或缺的设备,它被广泛应用于各种领域,如汽车、航空航天、机械制造等。
在电机的发展过程中,不同的技术不断涌现,以满足不同领域的需求。
其中,新型双凸极电机及转矩脉动抑制技术是当前研究的热点之一。
二、新型双凸极电机的发展历程传统的电机通常采用单凸极结构,但这种结构存在着转矩脉动较大的缺点,这不仅会影响电机的稳定性,还会降低其效率。
为了解决这一问题,研究人员提出了新型双凸极电机。
这种电机采用了双凸极结构,通过改变磁极的排列方式,能够有效减小转矩脉动,提高了电机的稳定性和效率。
三、新型双凸极电机的特点1.转矩均匀:双凸极结构使得电机的磁场分布更加均匀,可以有效减小转矩脉动,提高了电机的稳定性。
2.效率提高:由于转矩脉动减小,电机的效率得到提高,能够更好地满足工业生产的需求。
3.结构简单:双凸极电机结构相对简单,易于制造和维护,减少了生产成本和维护成本。
四、转矩脉动抑制技术的研究进展为了进一步提高电机的性能,研究人员还提出了转矩脉动抑制技术。
这种技术主要包括两种方法:主动抑制和被动抑制。
主动抑制是通过控制电机的电流或电压来抑制转矩脉动,而被动抑制是通过改变电机的结构或材料来减小转矩脉动。
五、转矩脉动抑制技术的应用1.汽车领域:汽车是电机的重要应用领域之一,传统的转矩脉动会导致汽车驾驶的不稳定,通过转矩脉动抑制技术,能够提高汽车的驾驶稳定性和舒适性。
2.航空航天领域:航空航天领域对电机的要求更加严格,电机的性能直接关系到飞机的安全性,转矩脉动抑制技术能够提高电机的可靠性和稳定性。
3.工业制造领域:工业生产对电机的稳定性和效率要求较高,转矩脉动抑制技术能够提高电机的生产效率。
六、新型双凸极电机及转矩脉动抑制技术的前景新型双凸极电机及转矩脉动抑制技术的研究是当前的热点之一,它们能够提高电机的效率和稳定性,满足不同领域的需求。
随着技术的不断进步,这些技术将会得到更广泛的应用,并带来更大的经济效益和社会效益。
12/8极双凸极永磁电机的分析与优化设计的开题报
告
该项目的研究需求主要是针对12/8极双凸极永磁电机的分析与优化设计展开,旨在提高永磁电机性能与效率,满足实际工程应用需求。
具
体的研究内容与计划将在以下几个方面展开:
1. 永磁电机理论分析:对12/8极双凸极永磁电机的理论组成与原理进行深入的分析,系统掌握永磁电机的基本工作原理、结构组成及其特点。
通过理论模型构建,分析永磁电机的基本物理特性和工作参数。
2. 模型建立与仿真分析:通过仿真软件进行永磁电机的建模分析,
包括电机工作原理分析、磁场分析、气隙磁密分布分析、电磁场分析等。
通过仿真分析找出永磁电机存在的问题和不足,为优化设计提供参考。
3. 优化设计方案:建立基于永磁电机理论和仿真分析的优化设计思
路和方案,包括优化设计的磁路结构、线圈大小和形状等方面。
设计考
虑到永磁电机的可靠性、功率密度、转矩与效率等关键指标。
4. 实验验证及性能评估:对设计的永磁电机进行实验验证,测试其
性能指标,如转速、转矩、功率、效率等。
将实验结果与仿真模型进行
对比分析,评估优化设计的成果和效果。
本研究的意义在于提高永磁电机的整体性能和效率,应用于工程领域,促进电机工业的进步与发展。
同时,研究所得结论和方法也为类似
永磁电机的优化设计和应用提供了参考和借鉴。
中图分类号:T M 352 文献标识码:A 文章编号:100126848(2006)0920001205定子双馈电双凸极电机恒功率弱磁控制的研究常 莹,程 明,孔祥新(东南大学电气工程系,南京 210096)摘 要:介绍了定子双馈电双凸极电机(S D F DS )的结构、原理和弱磁调速控制方法。
相对于永磁电机,定子双馈电双凸极电机磁场可调,易于实现弱磁控制和基速以上的恒功率控制,大大扩大了电机的调速范围。
针对一台三相12/8极定子双馈电双凸极电机,运用Matlab /Si m ulink 软件建立仿真模型,实现该双凸极电机的恒功率弱磁调速,从而说明电机有调速范围更宽的优点。
关键词:定子双馈电;双凸极电机;弱磁控制;仿真;恒功率;调速I n vest i ga t ion of F lux W eaken i n g C on tr ol for S ta tor D oub ly 2Fed D oub ly 2Sa l i en t M otorCHA N G Ying,CHENG Ming,K ONG Xiang 2xin(D e p t 1of Elec trica l Engineering,Southeast U niv 1,Nanjing 210096,China)ABSTRAC T:I n the paper,the structure,operation p rinciples and flux weakening control m ethods f or the sta t or doubly 2fed doubly salient (S D F DS )mot or are intr pared w ith per m anent m agnet motor ,its m agnetic field can be r egula ted.Hence it is easy to rea lize flux 2weakening contr ol in S D F DS motor ,and in turn gr eatly extending the constant power operati on range .By using Matlab /Si m ulink,modeling f or a 12/82pole S DF DS motor is drveloped and the si mula tion ana lysis is ca rried out .The re 2sults show tha t the m uch w ider constant operati on range can be achieved by the flux weakening contr ol .KEY W O RDS:S DF DS flux weakening contr ol ;Doubly salient motor ;Si mula tion;Constant power收稿日期6282国家自然科学基金项目(53,5333)0 引 言电动车电机驱动系统应具有功率密度高、效率高、调速范围宽和免维护等特点[1]。
一种新型轴向磁通双凸极永磁电机的电磁设计的开题报告一、研究背景永磁电机是一种能够将电能转换成机械能的高效转换装置,广泛应用于各种领域,如船舶、汽车、电力等。
传统的永磁电机主要是径向磁通结构,其结构复杂且在高转速下容易产生振动和噪音。
近年来,国内外学者提出了轴向磁通结构的永磁电机,其结构简单、可靠性高、功率密度大,逐渐受到人们的关注。
本课题要研究的是一种新型轴向磁通双凸极永磁电机,它具有复杂的结构和独特的电磁性能,需要进行电磁设计和优化。
二、研究目的本课题的研究目的是:1. 建立新型轴向磁通双凸极永磁电机的电磁分析模型,分析其电磁性能;2. 优化其电磁设计参数,以提高电机的效率和性能;3. 开展仿真计算和实验验证,验证该电机的性能和可靠性。
三、研究内容及方法本课题的研究内容包括:1. 建立电机的电磁模型,并使用有限元软件进行电场和磁场仿真计算;2. 优化电机的电磁设计参数,包括永磁体的磁性能、绕组的设计、导体的材料等要素;3. 使用ANSYS等电磁场软件对电机进行仿真计算,分析电机的电磁性能;4. 根据仿真计算结果,进行实验验证,并进行电机的性能测试。
本研究将采用有限元计算和实验验证相结合的方法,以提高研究的可靠性和准确性。
四、预期成果本课题的预期成果包括:1. 建立新型轴向磁通双凸极永磁电机的电磁模型,并进行仿真计算;2. 对电机的电磁设计参数进行优化,提高电机的效率和性能;3. 进行电机的实验验证,确认其性能和可靠性;4. 发表相关学术论文或专利。
五、研究进度计划本课题研究的进度计划如下:1. 第一年:建立电机的电磁模型,并进行有限元软件的电场和磁场仿真计算。
2. 第二年:优化电机的电磁设计参数,并使用ANSYS等电磁场软件进行仿真计算。
3. 第三年:进行电机的实验测试,并进行性能分析和优化调整。
4. 第四年:总结研究成果,撰写学术论文或申请专利。
六、参考文献1. 某某,某某. “轴向磁通永磁同步电机研究”[J].中国机械工程,2015,26(12)。
双凸极永磁电机的控制方案研究
发表时间:
2010-05-10T16:21:41.310Z 来源:《计算机光盘软件与应用》2010年第4期供稿 作者: 盛浩琪
[导读] 双凸极永磁电机的主要特点是结构简单,适合于自动化制造。
盛浩琪
(宁波公运车辆检测有限公司,浙江宁波 315000)
摘要:双凸极永磁电机的主要特点是结构简单,适合于自动化制造。与双凸极永磁电机设计有关,得到使定位转矩为零的充分条件。
鉴于位置传感器的不精确和一种现存的无位置传感器方案的移相困难,提出了一种新的无位置传感器方案。仿真验证了新方案的精确性。
实际可行性由一单片机系统初步证实。
关键词:双凸极;永磁电机;无位置传感器
中图分类号:TM3 文献标识码:A 文章编号:1007-9599 (2010) 04-0000-01
Doubly Salient Permanent Magnet Motor Control Scheme
Sheng Haoqi
(Ningbo Public Transport Vehicle Detection Co., Ltd.,Ningbo 315000,China)
Abstract:The main characteristics of Doubly Salient Permanent Magnet Motor is simple structure,suitable for automated manufacturing.And the
doubly salient permanent magnet motor design is related to positioning are sufficient conditions for zero torque.Given the imprecise position sensor
and a non-existing program phase shift position sensor problems,a new Unposition sensor scheme.Simulation results show the accuracy of the new
program Practical feasibility and initial confirmed by a microcomputer system.
Keywords: Doubly Salient;Permanent magnet motor;Unposition sensor
双凸极永磁电机采用高性能永磁体激磁,工作在双极性状态下,其能量转化率和绕组利用率较传统变磁阻电机要高,因此它具有较高
的转矩密度,与相同功率等级的传统变磁阻电机相比,其体积较小。由于高性能永磁体的采用,双凸极永磁电机设计时绕组匝数与相同功
率等级的变磁阻电机相比要少,加之采用集中绕组和体积的减小,绕阻端部长度亦较小,故此电机铜耗较传统变磁阻电机要小。在小功率
应用范围内,由于铜耗在总损耗中占较大分量,与传统变磁阻电机相比较,双凸极永磁电机在效率上的改进尤为明显。
如果控制的设计能使用一个精确的模型,那么利用线性反馈技术和预先计算好的最优的转矩分配函数,就能导致最优的动态性能。然
而,使用精确模型意味着复杂的在线计算,或者是巨大的用来查询的表格,这些暂时都难以实现;而实际上模型的不精确性是不可避免
的,从而不可避免的使性能变坏;还有实际的测量的不精确。然而可以采用一种完全不同的思路,即使用一个简化的模型,而其中的参数
被自适应的实时的调整。总之,改善双凸极电机的动态性能的控制方法正在不断完善。
一、位置传感器方案
“两相导通”策略下,控制器的主要任务是根据当前的转子位置决定哪个两
相组合导通。事实上,导通原则只是间接地依赖于转子位置,而直接地依赖于反电势。换句话说,即:“总是选择线反电势较大的两相
导通
”。
由于反电势难以获知,而它与转子位置有固定的联系,因此改由检测转子位置来决定触发信号。如果反电势与转子位置的关系已知,
那么,这样的传感器装置
(比如槽形光耦配合遮光盘)不难设计。此时,控制器的作用就像一个简单的译码器,它接收3路位置传感器信号,
而产生
6路逆变桥控制信号。
二、无位置传感器方案
(一)位置传感器的缺点
使用位置传感器无疑是最简单的,同时也是可靠的。更为重要的是,它不存在起动困难。其缺点是控制器与电机的连线过多、传感器
增加了系统的硬件成本、不能灵活地调整控制策略,以及在大极对数下对传感器的安装精度要求过高。为解决这个问题,可以通过无位置
传感器方案来解决。
(二)一种经典的无位置传感器方案
这一方案的原理是:检测关断相反电势的过零点;在过零点之后,电机再转过30度电角,即换流时刻。通过检测三相端电位即可检测
关断相反电势的过零点。
任何平顶宽度达到或超过120度电角的反电势都能够保证,在某相成为关断相期间,另外两相的反电势的幅值始终相等。事实上,对反
电势的要求无需如此苛刻。确切地说,只需在关断相反电势的过零点位置,导通两相的反电势具有相等的幅值即可。换句话说,在关断相
反电势过零点位置的两边,中心点电位可以偏离导通两相端电位的中点。这样并不会引起检测过零点位置的误差。把这一要求称为对反电
势的最小约束
[1]
。可以证明,反电势波形的峰(谷)若左右对称如正弦波、等腰梯形波,即可满足上述要求。当然,中心点电位的偏离不能太
大,那样的话,将产生多余的伪过零点。如果反电势满足最小约束,则在此过零点位置,同样满足两相的电感相等,因为此时两相绕组处
于相同的磁路环境。因此,与反电势的情况相同,即使在其它位置
“电感相等”的条件不能满足,也不会影响过零点判断的精度。
可见,过零点的判断几乎不依赖于电机参数;换句话说,过零点判断在理论
上几乎没有误差。这是这一方案最(或许也是唯一)迷人的地方。
误差在“移相30度”时开始引入。事实上,根本无法实现移相,因为并不能测量角度。所能做的,是在检测到过零点之后延迟一段时间
(
这段时间内,估计电机转过30度电角),再实施换流。显然,延迟时间的长短依赖于当时的转速。
由于电机在两个相邻的过零点之间转过60度电角,因此,延迟时间通常取前一个过零点到当前过零点的时间的一半。然而,这无疑使
换流精度与动态响应成为矛盾。注意,不要误以为解决如何精确地转过
30度电角是完善这一方案的关键。
因为,如果能精确地转过30度电角,那么也能精确地转过60度电角,于是,可以从上一个换流点直接得到下一个换流点,而不需要再
检测什么过零点。也就是说,到时候找到的是一个全新的方案,而不是对原方案的改进。
因为电机静止时没有反电势,所以该方案存在起动困难。据作者所知,起动问题至今还没有成熟的、普遍适应的解决办法。在一些简
单的场合,比如己知负载的大小和惯量,可以先由
(任意)两相通电使转子定位,然后以开环调频的方式使电机按照既定的速度曲线起动。
三、本文提出的无位置传感器方案
鉴于上述方案将在“移相30度”时引入误差,作者提出了一种直接检测反电势交叉点的无位置传感器方案。必须承认,新方案虽然不需
要移相,但将依赖于电机的参数。
检测反电势的交叉点实质上是比较两相反电势的大小。显然,无法直接得到反电势然后比较它们。反电势的信息主要还是从相端电压
获得。用
Mierochip公司的PIC16F873单片机实现了新方案的最简模式。所谓最简模式,是直接比较相端电压,而不计电流的影响。这在轻
载下不致引起太大的误差,仍可用来检验新方案的可行性。进一步补偿电流的影响须求助于
DSP芯片(其中包括高速A/D转换),因为算法包
含微分运算以及与之相联系的数字滤波。与上一方案比较,新方案的优点是理论上没有误差
;缺点是多了电流测量环节。注意,在补偿电流
在绕组电感上的感应电压时,无需知道所有转子位置上的电感值,而只需知道换流时刻对应的电感值即可
(与上一方案同理)。这一点相当重
要,因为不然的话,该方案根本不可行。
参考文献:
[1]MicroSim Corporation,Brushless DC Motor Model,MicroSim Application Notes.Version 8.0 June,1997,44-54