线扫描相机的原理及应用
- 格式:ppt
- 大小:9.72 MB
- 文档页数:44
数码照相机的原理与结构数码照相机的原理与结构在数字化浪潮扑面而来的今天,新技术和新产品越来越多地影响着我们的,拥有一件数字化的产品也已成为了一种新时尚,照相机无疑是最贴近我们日常生活的用品,究竟是数码相机,它有那些特点,如何选购、使用等。
下面是店铺为大家精心推荐数码照相机的一些相关知识,希望能够对您有所帮助。
数码相机原理篇一、什么是数码相机所谓数码相机,是一种能够进行拍摄,并通过内部处理把拍摄到的景物转换成以数字格式存放的图像的特殊照相机。
与普通相机不同,数码相机并不使用胶片,而是使用固定的或者是可拆卸的半导体存储器来保存获取的图像。
数码相机可以直接连接到计算机、电视机或者打印机上。
在一定条件下,数码相机还可以直接接到移动式电话机或者手持PC机上。
由于图像是内部处理的,所以使用者可以马上检查图像是否正确,而且可以立刻打印出来或是通过电子邮件传送出去。
二、数码相机的特点:与传统的相机相比,数码相机在拍摄质量上还是有一定的差距的。
但是,它也有传统相机无法比拟的优势:数码相机与传统相机相比存在以下五大区别:制作工艺不同、拍摄效果不同、拍摄速度不同、存储介质不同、输入输出方式不同。
其中最大分别在于记录影像的方式,请先看看以下的流程:传统相机:镜头-->底片。
数码相机:镜头-->感光芯片-->数码处理电路-->记忆卡。
数码相机跟传统相机在影像摄取部份大致相同,主要有拍摄镜头,取景镜头,闪光灯,感光器和自拍指示灯等,所以只看相机的前面外型,两者可说是没多大分别,但在成像及记录方面,两者的分别就大了。
传统相机是利用底片这东西,而数码相机主要靠感光芯片及记忆卡。
数码照相机的优点1、即拍即见:如果你或参加一些重要的约会时用传统相机拍摄,回来后冲洗,赫然发现拍摄的品质不对劲,如太光,太暗,主题被挡甚或完全没有影像,这时的心情真是难以形容。
但用数码相机就不会发生这种情况,因为差不多所有的数码相机会有一个叫液晶显示器(LCD)的东西,它可以立即显示刚拍下的影像,如果发现不对劲,可以把影像删除,再重新拍摄,直到您满意为止。
基于线阵TDI 一CCD 器件的扫描成像系统设计摘要提出凰进电机控制振镜运转,基于线阵TDI - - ccD 相机的扫描成像设计方案。
通过研究线阵妞器件的结构与工作原理,得到对振镜扫描速率和相机行扫描速率进行同步的方法,实现了空间位置配准。
采用EC - - n 相机进行成像实验,扫描成像系统输出了可辫别的图像。
关键词时间延迟积分;线扫描同步;步进电机1 引言随着CCD 及计算机图形处理技术的日益成熟,在高速扫描成像探测系统中利用线阵0 皿D 进行图像传感发展迅速。
同目前的凝视阵列伎术相比,扫描线阵列具有很多优点。
例如,通过用交错行构造紧密布置的像元,给出一个无间隙的图像,从而提高了空间分辨率,无需牺牲灵敏度,而两维阵列像元之间的间隙会引起小的目标像失真和不稳定[1j 。
但是由于线阵器件积分时间较短,限制了系统探测性能。
为了提高信噪比,时间延迟积分( TIME DEIJAY AND INTEGRATION , TDI )技术广泛应用到线阵器件中,如法国SOFRADIR 公司的288x4 、48OX6 中长波红外探测器,EC - - n 线阵CCD 相机中使用的512x96 探测器。
采用TDI 技术后,系统信噪比可以提高了而倍[2j 。
在一些将高速扫描转到凝视成像状态的特殊应用条件下,应使用具有TDI 功能的线阵探测器,这就需要研究基于线阵探测器扫描成像控制技术,以保证系统能正常成像。
2 线阵TDI 一CCD 器件成像原理TDI 一CCD 的结构近似一个长方形的面阵CCD 器件,但在功能上是一个线阵CCD 器件,列数是一行的像元数,行数为延迟积分级数N 。
TDI 一CCD 采用了特殊的扫描方式,工作原理某一列上的第一个像元在第一个曝光积分周期内收集到的信号电荷并不直接输出,而是与同列第二个像元在第二个积分周期内收集到的电荷相加,相加后的电荷移向第三行……,CCD 最后一行(第N 行)的像元收集到的信号电荷与前面N - 1 次收集到的信号电荷累加后移到输出寄存器中,按普通线阵CCD 器件的输出方式进行读出。
《计算机视觉技术》作业线结构光技术结构光就是把一个具有一定样式的光(面状、网状或者其它复杂的形式)按照已知的角度照射到一个物体上。
这种技术对于图像采集并获取空间信息是十分有用的。
根据光学投射器所投射的光束模式的不同,结构光模式又可以分为点结构光模式、线结构光模式、多线结构光模式及网格结构光模式等。
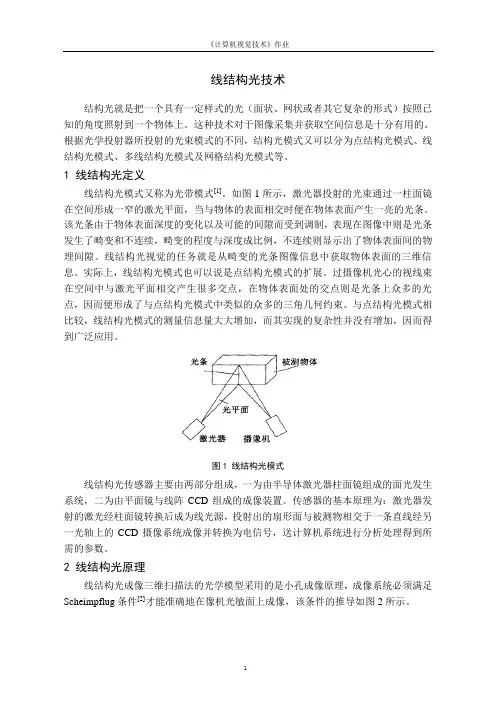
1 线结构光定义线结构光模式又称为光带模式[1]。
如图1所示,激光器投射的光束通过一柱面镜在空间形成一窄的激光平面,当与物体的表面相交时便在物体表面产生一亮的光条。
该光条由于物体表面深度的变化以及可能的间隙而受到调制,表现在图像中则是光条发生了畸变和不连续,畸变的程度与深度成比例,不连续则显示出了物体表面间的物理间隙。
线结构光视觉的任务就是从畸变的光条图像信息中获取物体表面的三维信息。
实际上,线结构光模式也可以说是点结构光模式的扩展。
过摄像机光心的视线束在空间中与激光平面相交产生很多交点,在物体表面处的交点则是光条上众多的光点,因而便形成了与点结构光模式中类似的众多的三角几何约束。
与点结构光模式相比较,线结构光模式的测量信息量大大增加,而其实现的复杂性并没有增加,因而得到广泛应用。
图1 线结构光模式线结构光传感器主要由两部分组成,一为由半导体激光器柱面镜组成的面光发生系统,二为由平面镜与线阵CCD组成的成像装置。
传感器的基本原理为:激光器发射的激光经柱面镜转换后成为线光源,投射出的扇形面与被测物相交于一条直线经另一光轴上的CCD摄像系统成像并转换为电信号,送计算机系统进行分析处理得到所需的参数。
2 线结构光原理线结构光成像三维扫描法的光学模型采用的是小孔成像原理,成像系统必须满足Scheimpflug条件[2]才能准确地在像机光敏面上成像,该条件的推导如图2所示。
图2 Seheimpf1ug 条件的证明图2是由任意放置的激光漫反射带及CCD 相机所组成的几何光路示意图,a’是激光面在光轴上的物距,b 是其像距,透镜中心为O 。
2d激光扫描仪的原理
2D激光扫描仪的原理主要基于激光三角测量技术。
这种技术利用激光器和特定透镜系统,在被测物体表面形成一条激光线。
这条激光线随后被反射并投射到一个高敏感度的传感器感光矩阵上。
通过测量激光线在传感器上的位置,以及与被测物体的距离信息(Z轴),控制器可以计算出沿激光线(x轴)上的位置。
通过移动被测物体或传感器,可以得出三维测量结果。
在扫描过程中,二维激光扫描仪将激光发射器发出的可见红色激光射向物体表面,反射的激光被内部的CCD线性相机接收。
根据不同的距离,CCD线性相机可以在不同的角度下“看见”这个光点。
数字信号处理器利用这些信息,结合三角函数计算光点在感光矩阵上的位置,从而得出传感器和被测物之间的距离。
除了这种基于三角测量的原理,一些二维激光扫描仪还采用回波分析法进行测量。
这种类型的扫描仪通过激光发射器每秒发射一百万个脉冲到检测物并返回至接收器,处理器计算激光脉冲遇到检测物并返回接收器所需时间,以此计算出距离值。
请注意,具体原理可能因设备型号和制造商而异。
在操作和使用之前,建议查阅设备说明书或与制造商联系以获取更详细的信息。
1 系统结构我院于2004年11月引进柯达850型CR 机一台,同时附带工作站和柯达8100激光相机各一台,其主要由影像采集板(IP)、影像采集板抽取结构、激光扫描装置,影像信号采集、处理、存储系统及控制系统等部分组成。
2 工作原理机器开机后有一个自检过程,在这个过程中会检测自身的机械运动及程序控制运转是否正常,并通过触摸显示屏显示出来。
它的基本工作原理是X 线透过人体后,射到影像采集板上,并形成潜影,曝光后的影像采集板插入CR 扫描仪,CR 扫描仪将影像采集板的荧光层自动抽取进入扫描系统,在匀速移动中激光束扫描带有潜影的荧光层,存储在其中的荧光晶体内的潜影能量受激光照射后发出荧光信号,被光电倍增管接受后转换成电信号,再通过A/D 转换成数字信号,输入计算机数字图像处理系统,最后形成高质量数字图像;潜影信息读出后,用强光照射荧光层使残留信息彻底消除,影像采集板可再重复使用。
3 故障维修该机在我院使用以来出现过一些故障,由于柯达公司的知识产权保护,譬如系统以及更换配件之类的故障难以自行解决,但大多数故障通过对机器工作原理及结构的了解是可以解决的,现将常见故障及排除方法介绍如下:3.1 故障一故障现象:影像采集板(IP)卡在激光扫描仪插槽内。
排除方法:此故障是由于机器使用一段时间后,影像采集板(IP)和CR 仪机械结构的磨损老化,在动作的某一时刻无法释放影像采集板(IP)而造成,可以用系统自带的“程序释放功能”或者重新开关机取出;如果以上两种方法还是不能取出,那就要打开设备右侧护板,手动转动丝杠电机直到影像采集板(IP)整体降入设备体内后同时按下托盘上的两个IP 板卡扣开关,即可取出。
注意取出后将此片盒做一标记,如果下次还卡住,那就要考虑更换它。
3.2 故障二故障现象:影像采集板(IP)插入CR 扫描仪后,荧光板没有被抽取执行图像扫描,而直接退出。
排除方法:此故障一般情况下是由于影像采集板在长期使用过程中,条形码被污垢挡住或被破坏,读码器无法正常识别,只要用橡皮擦除污垢或更换新的条形码即可解决;如果以上操作仍然无法解决,考虑是否是读码器的原因。
目录1.1相机和镜头的选型 (2)1.2线阵相机和镜头选型 (2)1.3图像采集卡、相机接口、PCI、PCI-E插槽的选型 . 3 1.4线阵相机、镜头、光源的选型详解 (4)1.5线阵相机与面阵相机的区别 (6)1.6工业相机的问与答 (9)线阵相机相关技术报告1.1 相机和镜头的选型1.1.1面阵相机和镜头的选型已知:被检测物体大小为A*B,要求能够分辨小于C ,工作距为D 解答:1. 计算短边对应的像素数 E = B/C ,相机长边和短边的像素数都要大于E ;2. 像元尺寸 = 物体短边尺寸B / 所选相机的短边像素数;3. 放大倍率 = 所选相机芯片短边尺寸 / 相机短边的视野范围;4. 可分辨的物体精度 = 像元尺寸 / 放大倍率 (判断是否小于C );5. 物镜的焦距 = 工作距离 / (1+1 / 放大倍率) 单位:mm ;6. 像面的分辨率要大于 1 / (2*0.1*放大倍率) 单位:lp mm ⁄;以上只针对镜头的主要参数进行计算选择,其他如畸变、景深环境等,可根据实际要求进行选择。
1.1.2针对速度和曝光时间的影响,物体是否有拖影已知:确定每次检测的范围为80mm*60mm ,200万像素 CCD 相机(1600*1200),相机或物体的运动速度为12m min ⁄ = 200mm s ⁄。
曝光时间计算:1. 曝光时间 < 长边视野范围 / (长边像素值 * 产品运动速度)2. 曝光时间 < 80 mm / (1600∗250 mm/s);3. 曝光时间 < 0.00025s = 14000 s ⁄;总结:故曝光时间要小于14000 s ⁄,图像才不会产生拖影。
1.2线阵相机和镜头选型1.2.1 相机的选型已知:幅宽 1600mm 、检测精度 1mm pixel ⁄、运动速度 22000mm s ⁄、物距1300mm ;解答:1. 相机像素数 = 幅宽/检测精度 = 1600mm / 1mm /pixel = 1600pixel ,2.最少2000个像素,选定为2k相机;3.扫描行频 = 运动速度/实际检测精度 = 22000mm /0.8mm = 27.5KHz应选定相机为2048像素28kHz相机,像元尺寸10um;1.2.2 镜头的选型1.Sensor 长度 = 像素宽度×像素数 = 0.01mm × 2048 = 20.48 mm ;2.镜头焦距 = sensor 长度×物距 / 幅宽 = 20.48×1300/1600 =16 mm;1.3图像采集卡、相机接口、PCI、PCI-E插槽的选型图像采集卡、相机接口、PCI、PCI-E插槽的选型如表 1-1、1-2所示:表1-1 相机接口表表1-2 PCI插槽类型表计算数字采集卡的数据率必须满足的要求可按下列公式计算:图像采集卡的数据率(又称点频)≥ 1.2 * 相机数据率;相机数据率(又称像素时钟)= 相机分辨率 * 相机帧频 * 相机的灰度级 / 8;插槽的带宽>图像采集卡的数据率>相机接口的带宽> 1.2 * 相机数据率;PCI插槽有PCI 32bit和PCI 64bit的区别。
【机器视觉】面阵CCD相机与线阵CCD相机的区别随着技术的逐步成熟,越来越多的行业已经利用这一技术应用来为企业生产更好的服务,产品外观质量检测就是其中一项。
产品表面残破检测系统是由多只线扫描CCD相机,按生产线的速度同步举行图像摄取,将摄取到的图像转化为数字信号传送给图像处理系统;图像处理系统再按照所得信息与表面无残破的产品模板举行匹配,进而按照匹配结果来识别图像的内容或控制现场的设备动作,匹配胜利则通过检测,匹配不胜利发出信号举行相应操作。
据在资深技术员张涛介绍,他目前在维视数字图像技术有限公司从事的就是CCD相机的开发工作,CCD相机分为线扫描CCD相机和面扫描CCD 相机。
他介绍说,线阵CCD相机具有敏捷度高,动态范围大,性价比高等特点。
因为其结构容易,成本较低,并且可以同时储存一行电视信号,加上它可以做无数单排感光单元,在同等测量精度的前提下,线阵CCD 相机的测量范围可以做的较大,并且因为线阵CCD实时传输光电变换信号和自扫描速度快、频率响应高,可以实现动态测量,并能在低照明度下工作,所以线阵CCD广泛地应用在产品尺寸测量和分类、非接触尺寸测量、条形码等许多领域。
面扫描CCD电荷包的转移状况与线阵CCD的器件类似,只是它的形式较多。
结构容易,则摄象质量不好,反之摄象质量好的,驱动就会变得复杂。
再加上生产技术的制约,单个面阵CCD的面积很难达到普通工业测量对视场的需求。
新近市场上研制出了一种线阵CCD亚像元的拼接技术,该技术可提高CCD的辨别率,缓解了因为受工艺和材料影响而很难减小CCD像元尺寸的难题,在理论上可获得比面阵CCD相机更高的辨别率和精度。
所以线阵CCD被广泛应用。
工业相机根据结构分为面阵CCD相机与线阵CCD相机。
面阵CCD的优点是可以猎取二维图像信息,测量图像直观。
缺点是像元总数多,而每行的像元数普通较线阵少,帧幅率受到限制,因此其第1页共3页。

伽马相机工作原理
伽马相机是一种新型的成像设备,其工作原理主要是基于伽马射线的物理效应。
伽马射线是一种高能电磁波,其波长极短,能够穿透很厚的物质,因此被广泛应用于医疗、核能及材料研究等领域。
伽马相机是一种利用伽马射线探测物质内部结构的设备,其主要原理是通过伽马射线与物质原子的相互作用,测量其在探测器内的能量和位置信息,从而重建出物质内部的三维结构。
伽马相机主要由探测器、电子学、电脑及成像算法等部分组成,并可根据不同需求定制各种型号和规格。
探测器部分是伽马相机的核心组成部分,其一般由多个伽马射线探测器组成。
伽马射线在探测器内引起闪烁,随后被光感应器转换成光信号,再由电子学部分进行信号放大和数字化处理。
电子学部分负责接收、放大和数字化处理由探测器传递过来的信号,并将数据传输到计算机中进行进一步的处理和分析。
计算机部分是伽马相机最为关键的部分之一,主要负责将传输自电子学部分的原始数据进行重建和成像,从而得到物质内部的三维结构图像。
伽马相机的成像算法十分复杂,需要进行大量的数学计算和运算,因此需要使用高性能的计算机和专业的软件来实现。
当伽马相机扫描被探测物体时,其探测器会收集大量的伽马射线信号,并将这些信号传输到电子学和计算机部分进行进一步处理。
经过一系列复杂的数学算法,计算机可以将这些信号转换成高质量的三维成像图像,从而实现对被探测物体内部结构的观测和分析。
伽马相机由于其高精度、高分辨率和非侵入性等特点,已被广泛应用于医疗诊断、核能及材料研究等领域,极大地推动了这些领域的科学研究和技术发展。
线结构光测量原理引言线结构光测量原理是一种常用的三维形貌测量方法,它通过投射一条或多条结构光线,通过相机拍摄物体表面反射的结构光图案,并通过计算和分析得到物体表面的三维形状信息。
本文将深入探讨线结构光测量原理的工作原理、应用领域和关键技术。
一、工作原理线结构光测量原理主要包括以下几个步骤:1.投射结构光线:在测量前,需要选择适当的结构光源,例如激光器、LED灯等,将结构光线投射到待测物体表面。
通常,使用线型结构光可以提供更好的表面测量精度。
2.拍摄结构光图像:通过相机或其他成像设备拍摄物体表面反射的结构光图像。
为了获得清晰的图像,可以采取一些增强技术,如相机同步触发、滤波等。
3.图像分析与处理:对拍摄的结构光图像进行分析和处理,提取出图像中的结构光线位置信息,通常可以通过图像处理算法进行边缘检测、滤波、二值化等操作。
4.三维形状重建:根据结构光图像中的结构光线位置信息,可以计算出物体表面相对于结构光源的三维坐标,从而重建出物体的三维形状。
二、应用领域线结构光测量原理在许多领域都有广泛的应用,以下将介绍几个代表性的应用领域:1.工业制造:线结构光测量原理可以用于工业制造中的表面质量检测和尺寸测量。
例如,在汽车制造中,可以通过线结构光测量原理对车身表面进行检测,以确保表面平整度和外观质量符合要求。
2.产品设计:线结构光测量原理可以对产品的外形进行快速测量和分析,帮助设计师改进产品设计。
例如,在手机设计中,可以通过线结构光测量原理对手机外观进行测量,以优化产品的造型和人机交互体验。
3.文物保护:线结构光测量原理在文物保护中有重要应用。
通过对文物表面进行三维形状测量,可以帮助文物保护专家进行文物的修复和保护。
同时,线结构光测量也可以用于文物数字化展示,方便研究和教育。
4.医疗领域:线结构光测量原理可以用于医疗领域中的三维面部扫描和手术模拟。
例如,在整形外科中,可以通过线结构光测量原理对患者的面部进行测量,以指导整形手术的设计和模拟。
3D扫描仪的原理?内容来源网络,由深圳机械展收集整理!更多3D打印展示,就在深圳机械展!三维扫描仪(3D scanner) 是一种科学仪器,用来侦测并分析现实世界中物体或环境的形状(几何构造)与外观数据(如颜色、表面反照率等性质)。
搜集到的数据常被用来进行三维重建计算,在虚拟世界中创建实际物体的数字模型。
这些模型具有广泛的用途,举凡工业设计、瑕疵检测、逆向工程、机器人导引、地貌测量、医学信息、生物信息、刑事鉴定、数字文物典藏、电影制片、游戏创作素材等等都可见其应用。
三维扫描仪的制作并非仰赖单一技术,各种不同的重建技术都有其优缺点,成本与售价也有高低之分。
目前并无一体通用之重建技术,仪器与方法往往受限于物体的表面特性。
例如光学技术不易处理闪亮(高反照率)、镜面或半透明的表面,而激光技术不适用于脆弱或易变质的表面。
大体分为接触式三维扫描仪和非接触式三维扫描仪。
其中非接触式三维扫描仪又分为光栅三维扫描仪(也称拍照式三维描仪)和激光扫描仪。
而光栅三维扫描又有白光扫描或蓝光扫描等,激光扫描仪又有点激光、线激光、面激光的区别。
1:三维扫描仪的用途是创建物体几何表面的点云(point cloud),这些点可用来插补成物体的表面形状,越密集的点云可以创建精确的模型(这个过程称做三维重建)。
若扫描仪能够取得表面颜色,则可进一步在重建的表面上粘贴材质贴图,亦即所谓的材质映射(texture mapping)。
2:三维扫描仪可模拟为照相机,它们的视线范围都体现圆锥状,信息的搜集皆限定在一定的范围内。
两者不同之处在于相机所抓取的是颜色信息,而三维扫描仪测量的是距离。
手持式三维扫描仪手持式三维扫描仪原理:线激光手持三维扫描仪,自带校准功能,采用635nm的红色线激光闪光灯,配有一部闪光灯和两个工业相机,工作时将激光线照射到物体上,两个相机来捕捉这一瞬间的三维扫描数据,由于物体表面的曲率不同,光线照射在物体上会发生反射和折射,然后这些信息会通过第三方软件转换为3D图像。
目录 1.1 相机和镜头的选型 ................................................. 2 1.2线阵相机和镜头选型 ............................................... 2 1.3图像采集卡、相机接口、PCI、PCI-E插槽的选型 . 3 1.4线阵相机、镜头、光源的选型详解 ....................... 4 1.5线阵相机与面阵相机的区别 ................................... 6 1.6工业相机的问与答 ................................................... 9 线阵相机相关技术报告 1.1 相机和镜头的选型 1.1.1面阵相机和镜头的选型 已知:被检测物体大小为A*B,要求能够分辨小于C,工作距为D 解答: 1. 计算短边对应的像素数 E = B/C,相机长边和短边的像素数都要大于E; 2. 像元尺寸 = 物体短边尺寸B / 所选相机的短边像素数; 3. 放大倍率 = 所选相机芯片短边尺寸 / 相机短边的视野范围; 4. 可分辨的物体精度 = 像元尺寸 / 放大倍率 (判断是否小于C); 5. 物镜的焦距 = 工作距离 / (1+1 / 放大倍率) 单位:𝑚𝑚; 6. 像面的分辨率要大于 1 / (2*0.1*放大倍率) 单位:lp𝑚𝑚⁄; 以上只针对镜头的主要参数进行计算选择,其他如畸变、景深环境等,可根据实际要求进行选择。 1.1.2针对速度和曝光时间的影响,物体是否有拖影 已知:确定每次检测的范围为80mm*60mm,200万像素 CCD 相机(1600*1200),相机或物体的运动速度为12m𝑚𝑖𝑛⁄ = 200mm𝑠⁄。 曝光时间计算: 1. 曝光时间 < 长边视野范围 / (长边像素值 * 产品运动速度) 2. 曝光时间 < 80 mm / (1600∗250 mm/s); 3. 曝光时间 < 0.00025s = 14000 𝑠⁄; 总结:故曝光时间要小于14000 𝑠⁄,图像才不会产生拖影。 1.2线阵相机和镜头选型
PL8KCL-50KX分时曝光线扫描相机使用说明书(V0.3 2020.01.20)合肥埃科光电科技有限公司/合肥埃科光电科技有限公司电话:+86-551-65318597传真:+86-551-65318597网址:地址:安徽省合肥市高新区燕子河路388号亿智科技产业园1号楼2层邮编:230088Hefei I-TEK Optoelectronics Co., Ltd.Tel: +86-551-65318597Fax: +86-551-65318597Website: Address: 2F,Building#1,Yizhi Sci-tech Industrial Park,No.388 Yanzihe Road,High-tech Industry Development Zone,Hefei230088,P.R.ChinaZip code: 230088商标版权声明“I-TEK”及其图案是产品商标,版权归本公司所有。
本说明中使用的“埃科光电”、“I-TEK”均指合肥埃科光电科技有限公司。
目录版本记录 (2)联系方式 (3)目录 (4)1 警告 (6)2 产品命名规则 (7)3 产品外形 (8)4 产品规格 (9)4.1 主要特性 (9)4.2 相机规格 (9)4.3 相机结构 (10)4.4 光谱响应 (10)4.5 相机使用 (11)4.6 认证RoHS (11)5 机械尺寸和接口 (12)5.1 机械外形图 (12)5.2 接口设计 (12)5.2.1 相机状态指示灯 (13)5.2.2 电源接口 (13)5.2.3 数据接口 (13)5.2.4 控制接口 (18)6 相机特性 (19)6.1 触发模式 (19)6.1.1 自由运行模式 (19)6.1.2 外部脉冲触发模式 (19)6.1.3 外部脉宽调制触发模式 (20)6.2 相机扫描方向 (21)6.3 图像水平翻转 (21)6.4 平场校正 (22)6.5 测试图像 (23)6.6 Camera Link输出模式 (23)6.7 数据BIT位宽 (23)6.8 增益&偏置 (23)6.9 相机温度 (24)6.10 加载/保存配置参数 (24)7 相机配置 (25)7.1 通信串口参数 (25)7.2 指令格式 (25)7.3 指令列表 (26)8 相机配置工具 (29)8.1 IKTool图形界面 (29)8.2 菜单栏 (29)8.2.1 文件 (29)8.2.2 相机 (30)8.2.3 语言 (31)8.2.4 关于 (31)8.3 相机配置区域 (32)8.3.1 常用 (32)8.3.2 时序 (34)8.3.3 查找表 (34)8.3.4 数字处理 (35)8.4 状态栏 (37)9 相机校正操作 (38)10 常见问题 (44)1 警告一般警告①禁止摔打,损坏,拆卸,修复或者自行改变相机。
线阵相机、镜头及光源的选型线阵相机顾名思义就是取像是成线性的。
它的传感器是成线型的。
举个例⼦:⽐如⾯阵相机的分辨率是640*480就是说这个相机横向有640个像元,纵向有480个像元。
⽽线阵相机分辨率只体现在横向,⽐如2048像素的线阵相机就是说横向有2048个像元,纵向⼤多数为1。
(RGB相机和TDI相机除外)关于线阵相机的传感器70年代⼤多数使⽤的是MOS,⽽从70年代末CCD开始迅速发展,⼀直到现在也是主流,CMOS⼤概是在80年代中期开始出现的,但是随着技术的发展CCD的取像速度要低于CMOS,⽽且直到2010年以前CMOS的传感器价格要⾼于CCD,从2010年以后⼏家主要的相机制造商都已经⼤⼒开发CMOS的相机了,并且也得到了不少的实际应⽤。
鄙⼈认为,以后的线阵相机主流将是CMOS的传感器。
(这两种传感器的优缺点⼤家可以到⽹上找,主要是取像速度和敏感度的差异)线阵相机的⼏个重要参数:1. resolution: 像素数,传感器上有多少个像元。
2. MAX DATA RATE(应该叫相机时钟吧):意思是相机每秒可以采取最⼤的数据量3. Linerate ⾏频:意思是每秒钟相机最⼤可以采取多少⾏影像⽐如像素为8192*1, data rate为160Mhz, 那么此相机的⾏频就是160M/8192= 19000line/sec每秒钟最⼤可以取像19000⾏,横向为8192pixel,纵向为19000pixel, 1秒钟取得的这幅图像⼤⼩⼤概为160M还有就是像元的⼤⼩和镜头的尺⼨。
⼀般ccd的像元⼤⼩最⼩为5um,再⼩好像做不出来,⽽且感光度也差,cmos的像元可以⽐ccd⼩近⼀倍。
相机的选择⼗分重要,直接关系到整体设备的成本,像素多就要采⽤⼤的镜头,数据量⼤就要采⽤传输率⼤的数据线,还需要图像处理卡,数据量⼤对运算要求也⾼,对计算机的要求也⾼。
还是以⽬前的主流CCD相机为例⼦吧,由于相机的取像速度有限,⼀般每个tap最多能取得60M的数据,所以⽬前告诉的相机都采⽤多tap的处理⽅式,⼀般每个tap为40M,拿160M的相机为例就是有4个tap ,每个tap的取像为40M,40M*4=160Mhz, 当然也有single-tap(1), dual-tap(2), triple-tap(3),octal-tap(8)之分,⽬前ccd的取像速度都低于400M,⽽cmos⽬前最⾼可以到1.6Ghz(以后可能会更⾼)相机的输出⽅式也有多种,8bit,10bit,12bit, 我主要了解的就是8bit ⿊⽩256进制影像。