线阵相机技术报告整理
- 格式:docx
- 大小:57.96 KB
- 文档页数:23
接触式线阵相机(CISC:Contact Image Sensor Camera)接触式线阵相机(CISC :Contact Image Sensor Camera)是采用接触式图像传感器的线阵相机。
CIS(Contact Image Sensor,接触式图像传感器),是继线阵CCD、CMOS技术之后发展完善的一类新型光电成像传感器。
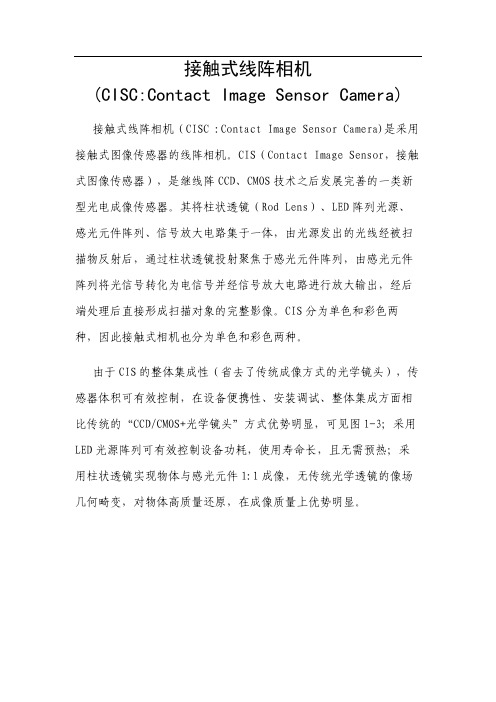
其将柱状透镜(Rod Lens)、LED阵列光源、感光元件阵列、信号放大电路集于一体,由光源发出的光线经被扫描物反射后,通过柱状透镜投射聚焦于感光元件阵列,由感光元件阵列将光信号转化为电信号并经信号放大电路进行放大输出,经后端处理后直接形成扫描对象的完整影像。
CIS分为单色和彩色两种,因此接触式相机也分为单色和彩色两种。
由于CIS的整体集成性(省去了传统成像方式的光学镜头),传感器体积可有效控制,在设备便携性、安装调试、整体集成方面相比传统的“CCD/CMOS+光学镜头”方式优势明显,可见图1-3;采用LED光源阵列可有效控制设备功耗,使用寿命长,且无需预热;采用柱状透镜实现物体与感光元件1:1成像,无传统光学透镜的像场几何畸变,对物体高质量还原,在成像质量上优势明显。
接触式线阵相机应用接触式线阵相机的典型应用领域是连续材料(如PCB、FPD、半导体晶圆、钢铁、玻璃制造、造纸、纺织、印刷等行业)的自动光学检测。
被检测的物体通常匀速运动 , 利用一台或多台相机对其逐行连续扫描 , 以达到对其整个表面均匀检测。
可以对其图象一行一行进行处理 , 或者对由多行组成的面阵图象进行处理。
另外线阵相机非常适合测量场合,这要归功于传感器的高分辨率 , 它可以准确测量到微米。
由于接触式线阵相机所固有的优势(体积小、功耗低、成本优势),在很多领域已替代线阵CCD相机,因此其自诞生以来,即得到了各行业的关注与应用。
国外厂商早已开展了CIS图像传感器的应用研究,并在各个行业占据了统治地位。
THQXZ-1型线阵CCD器件特性一、实验目的1.了解CCD器件的工作原理。
2.观测入射光强、ROG信号、CLK信号与CCD输出信号的关系。
3.测量微小物体的直径。
4.测量遮光条的档条宽度。
二、实验仪器THQXZ-1型线阵CCD器件特性实验仪,计算机(配备CCD图像采集软件)三、实验原理CCD是一种半导体光电转换器件,它是一种有独特功能的MOS(金属氧化物半导体场效应管)集成电路,CCD的突出特点是以电荷作为信号,而不同于其他大多数器件是以电流或电压为信号。
CCD器件主要由光电转换单元和电荷转移结构两部分组成,它有线阵和面阵两种结构类型,两种结构的应用都很广泛,其基本原理也是一样的,下面以线阵CCD 器件为例来说明其组成结构和工作原理。
本实验仪采用的SONY IXL511是一种单排结构的线阵CCD传感器,它的光敏单元与CCD移位寄存器分开,用转移栅控制光生信号电荷向移位寄存器转移,一般信号电荷转移时间远小于摄像时间(光积分时间)。
转移栅关闭时,光敏单元势阱收集光信号电荷,经过一定的积分时间,形成与CCD光敏面上光强信号对应的信号电荷分布。
积分周期结束时,转移栅打开,各光敏单元收集的信号电荷并行地转移到CCD移位寄存器的相应单元内。
转移栅关闭后,光敏单元开始对下一行图像信号进行积分,而已转移到移位寄存器的上一行信号电荷通过移位寄存器串过移位寄存器串行输出。
如此重复上述过程。
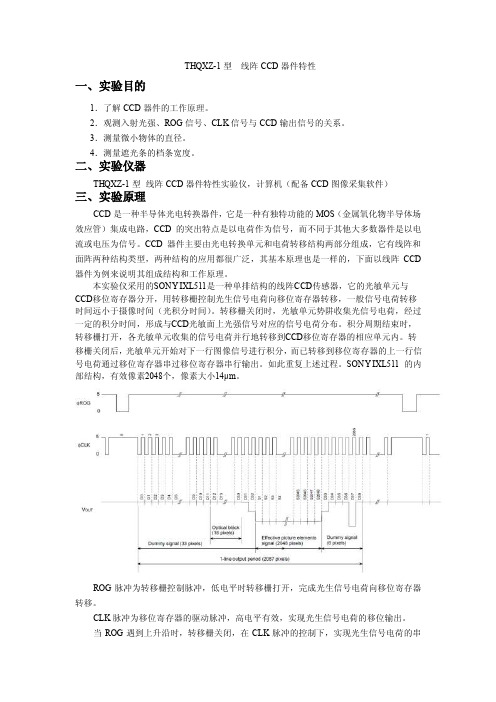
SONY IXL511 的内部结构,有效像素2048个,像素大小14μm。
ROG脉冲为转移栅控制脉冲,低电平时转移栅打开,完成光生信号电荷向移位寄存器转移。
CLK脉冲为移位寄存器的驱动脉冲,高电平有效,实现光生信号电荷的移位输出。
当ROG遇到上升沿时,转移栅关闭,在CLK脉冲的控制下,实现光生信号电荷的串行移位输出。
在此同时,光敏单元势阱收集下一个周期的光信号电荷,因此这段时间也称为光积分时间。
光积分时间可根据光强的大小进行适当调节,以便得到清晰的图像。

线阵相机的原理及应用简介线阵相机是一种常见的数字摄像机,它通过一条线上排列的像素阵列来捕捉图像。
线阵相机在工业、医疗、安防等领域应用广泛,它具有高速、高分辨率和高灵敏度等特点。
原理线阵相机的工作原理是根据光电效应将光信号转化为电信号。
其基本原理如下:1. 光信号进入线阵相机的镜头系统,经过透镜汇聚到像素阵列上。
2. 像素阵列是由一系列像素组成的,每个像素负责转换一个光信号。
3. 光信号通过像素中的光电二极管转化为电信号。
4. 电信号由线阵相机的电路进行放大、采样和转换。
5.最后,线阵相机将采集的电信号转化为数字图像数据。
应用线阵相机具有多种应用场景,以下是几个常见的应用领域。
工业检测线阵相机在工业检测中扮演重要的角色。
它能够实现对产品表面的高速、高精度检测。
例如,可以通过线阵相机对流水线上的产品进行外观缺陷检测,如划痕或裂纹等。
此外,线阵相机还可用于测量物体尺寸、形状和位置等,以确保产品质量。
高速拍摄线阵相机的高速特性使其成为拍摄快速运动物体的理想选择。
在体育赛事、机械动作分析等领域,线阵相机可以以非常高的帧率捕捉连续的图像,以便分析运动轨迹、速度和变化等参数。
文档扫描线阵相机可用于文档扫描,如扫描仪和复印机等设备。
由于线阵相机具有高分辨率和高速度的特点,它能够将纸质文档快速转换为数字格式,并保持图像清晰度。
医学成像线阵相机在医学成像领域也有广泛的应用。
例如,在牙科领域,线阵相机可以用于牙齿的拍摄和分析。
此外,在皮肤科和眼科等领域,线阵相机可以用于快速扫描和诊断。
安防监控线阵相机在安防监控中发挥着重要的作用。
利用线阵相机的高分辨率和高灵敏度,可以实现对监控区域的高清图像捕捉。
线阵相机还具有远距离监控能力,可以在夜间或低光条件下提供清晰的图像。
总结线阵相机作为一种常见的数字摄像机,其原理和应用十分广泛。
通过将光信号转化为电信号,线阵相机能够在工业、医疗、安防等领域发挥重要作用。
工业检测、高速拍摄、文档扫描、医学成像和安防监控等应用使得线阵相机成为许多行业中不可或缺的一部分。

三线阵CCD立体测绘相机总体技术研究的开题报告一、选题背景立体测绘相机是利用两个或多个摄像头同时拍摄同一物体或地区的影像,通过计算机技术对影像进行处理,获得被测物体或地区的三维空间信息的测量设备。
传统的立体测绘相机技术主要采用中框摄影技术,其构造复杂,对拍摄地面图像要求高,而且拍摄时间和数据处理时间较为耗时,限制了其在实际应用中的推广。
近年来,随着CCD技术的不断发展和进步,三线阵CCD立体测绘相机成为了研究的热点之一,其具有构造简单、数据处理速度快、准确度高等优点,逐渐得到了广泛应用。
二、研究目的本次研究旨在探究三线阵CCD立体测绘相机的原理、结构和特点,深入研究其相机标定、影像匹配、三维重建等关键技术,实现三线阵CCD立体测绘相机的精确测量。
三、研究内容1. 建模:建立三线阵CCD立体测绘相机模型,分析其原理和结构。
2. 标定:进行相机内外部参数标定、畸变校正和图像配准等工作,提高三线阵CCD立体测绘相机的精度和稳定性。
3. 影像匹配:基于相关性度量或特征点匹配等方法,进行图像匹配和纹理匹配,实现立体图像的生成。
4. 三维重建:通过对匹配得到的立体图像进行三维重建,获得被测物体或地区的三维空间信息。
5. 建模验证:通过与实际测量数据进行比对,验证所研究的三线阵CCD立体测绘相机的测量精度和可靠性。
四、研究方法本次研究采用实验研究和理论研究相结合的方法,通过实际拍摄和数据处理验证和分析三线阵CCD立体测绘相机的性能和精度。
五、研究意义本次研究对于进一步推广三线阵CCD立体测绘相机在实际应用中的应用具有重要意义,具有一定的理论研究和应用价值。
六、预期成果本次研究主要成果包括三线阵CCD立体测绘相机原理结构分析、相机标定、影像匹配、三维重建等关键技术研究,以及所研究的相机在实际应用中的测试和验证数据。
基于Sony芯片的151M面阵相机及彩色线阵TDI相机技术方案2-1. 核心技术项专利31 韩国专利 | 27 海外专利 58 自主研发 软件 硬件 光学系统热电制冷技术(VP,VNP 系列)像素移位技术(VN,VNP 系列)Resolution ComparisonNormal Shooting Pixel Shifting(4-shot mode)Pixel Shifting(9-shot mode)感光芯片暗光条件下的平板检测使得制冷技术成为必须,VP-71M开启制冷后,噪点减少高达90%以上。
VGA(640X480) HD(1280X720)SXGA 1280X1024)UHD (3840X2160) FHD (1920X1080)QHD (2560X1440) 3-1 VC-151M ,因何而生?显示面板的尺寸越做越大 Galaxy S3 1280 x 720Galaxy S5 1920 x 1080Galaxy S7 2560 x 1440 Galaxy S8 2960 x 1440检测相机的分辨率和视场也需要越来越大手机分辨率越做越高Galaxy S10 3040 x 14403-2. 主要新品技术指标 VC-151M, VP-151M项目VC-101M, VP-101M VC-151M, VP-151M 芯片类型CMOS(SONY IMX461) CMOS(SONY IMX411) 分辨率11,656 x 8,742 14,192 x 10,640 动态范围> 78 ㏈ 信噪比SNR47 ㏈ 曝光时间1us~60S 帧率8.7 fps (CXP), 8.1 fps (CL 10tap) 6.2 fps (CXP) 5.5 fps (CL 10tap) 制冷表现降低15℃ 满井容量50 Ke- 暗噪声3.9 e-3-3. 151M VS. 29M 分辨率White Pattern (R255, G255, B255)iPhone XR2436 x 1125 (458ppi)151M 29M3-3. 151M vs. 29M 实际动态范围比较151M29M Mura Detection Test 条件:1.背景灰度设置为162.第N 个亮点灰度设置为16+N3.N 范围:1~60 Mura 检测通常会在灰度值为16/32/64/128/164/255时点亮WRGB3-3. 151M所用IMX411芯片结构- 结构变化:将感光部上移- 主要优势:感光部的进光量增加,动态范围明显提升(78dB)- 噪声控制:长曝光下的噪声控制明显优于CCD- 应用场景:低光条件下对噪声非常敏感的检测。
CCD技术及应用实验:利用线阵CCD进行物体尺寸测量一、实验目的通过本实验掌握利用线阵CCD进行非接触测量物体尺寸的基本原理和方法,用实例探讨影响测量范围、测量精度的主要因素,为今后设计提供重要依据。
二、实验准备内容1.利用线阵CCD进行非接触测量物体尺寸的基本原理线阵CCD的输出信号包含了CCD各个像元所接收光强度的分布和像元位置的信息,使它在物体尺寸和位置检测中显示出十分重要的应用价值。
CCD输出信号的二值化处理常用于物体外形尺寸、物体位置、物体震动(振动)等的测量。
如图3-1所示为测量物体外形尺寸(例如棒材的直径D)的原理图。
将被测物体A置于成像物镜的物方视场中,将线阵CCD像敏面恰好安装在成像物镜的最佳像面位置上。
当被均匀照明的被测物体A通过成像物镜成像到CCD的像敏面上时,被测物体像黑白分明的光强分布使得相应像敏单元上存储载荷了被测物尺寸信息的电荷包,通过CCD及其驱动器将载有尺寸信息的电荷包转换为如图3-1右侧所示的时序电压信号(输出波形)。
根据输出波形,可以测得物体A 在像方的尺寸D',再根据成像物镜的物像关系,找出光学成像系统的放大倍率β,便可以用下面公式计算出物体A的实际尺寸Dβ/=(3-1)D'D显然,只要求出D',就不难测出物体A的实际尺寸D。
线阵CCD的输出信号U O随光强的变化关系为线形的,因此,可用U O模拟光强分布。
采用二值化处理方法将物体边界信息(图3-1中的N1与N2)检测出来是简单快捷的方法。
有了物体边界信息便可以进行上述测量工作。
2.二值化处理方法图3-2所示为典型CCD输出信号与二值化处理的时序图。
图中FC信号为行同步脉冲,FC的上升沿对应于CCD的第一个有效像元输出信号,其下降沿为整个输出周期的结束。
U G为绿色组分光的输出信号,它为经过反相放大后的输出电压信号。
为了提取图3-2所示U G的信号所表征的边缘信息,采用如图3-3所示的固定阈值二值化处理电路。
线阵相机市场发展现状引言线阵相机是一种基于线阵传感器的图像捕获设备,广泛应用于工业自动化、机器视觉和无损检测等领域。
本文旨在探讨线阵相机市场的发展现状,分析市场规模、应用领域以及未来发展趋势。
市场规模线阵相机市场在过去几年间一直保持稳定增长。
根据市场研究公司的数据显示,2019年线阵相机市场总体规模达到X亿美元,预计到2025年将达到X亿美元。
市场规模的增长主要受到工业自动化和机器视觉领域的推动。
应用领域工业自动化在工业自动化领域,线阵相机被广泛应用于产品检测、质量控制和流程监控等任务。
例如,在制造业中,线阵相机可用于检测产品外观缺陷、测量尺寸精度以及验证组装正确性。
此外,线阵相机还可以用于检测机械零件的表面瑕疵和损坏程度。
机器视觉在机器视觉领域,线阵相机是实现高速图像捕获和处理的重要工具。
机器视觉系统利用线阵相机进行图像识别和分析,以实现物体检测、边缘检测和目标跟踪等功能。
线阵相机的高分辨率和快速采集速度使其成为机器视觉应用的理想选择。
无损检测线阵相机在无损检测领域的应用也日益广泛。
无损检测是指在不破坏被测对象的前提下,利用物理、化学或生物特性对其进行检测和评估的方法。
线阵相机通过捕获物体的表面图像,可以用于检测焊缝、裂纹、变形等缺陷,为工业生产提供可靠的质量保证手段。
发展趋势高分辨率和高速度随着技术的不断进步,线阵相机的分辨率和采集速度得到了显著提升。
目前市场上已经出现了分辨率达到几千像素的高分辨率线阵相机,以及采集速度超过几千行/秒的高速线阵相机。
随着需求的增加,未来线阵相机的分辨率和速度还将继续提高。
多光谱成像多光谱成像是近年来线阵相机领域的一个热点发展方向。
传统线阵相机只能在可见光范围内采集图像,而多光谱线阵相机可以在不同波段范围内进行图像采集,从而提供更多的信息。
这在农业、环境监测和医疗诊断等领域具有重要应用价值。
深度学习与线阵相机的结合随着深度学习技术的兴起,越来越多的机器视觉应用开始采用深度学习算法。
线阵CCD原理及应⽤报告线阵CCD⼀、概述电荷耦合器件(CCD, Charge Coupled Device)是⼀种以电荷包的形式存储和传递信息的半导体器件,它是由美国贝尔实验室的W. S. Boyle和G.E. Smith 在1970年前后发明的。
它经历了以研究为主的发展阶段,在五年左右的时间内,建⽴了以⼀维空阱模型为基础的CCD基本理论,这个理论与实验结果⼤致相符,并满⾜了指导器件进⼀步发展的需要。
与此同时,依靠成熟的MOS集成电路⼯艺,CCD迅速从实验室⾛向了市场。
CCD在影像传感、信号处理和数字存储等三⼤领域中的⼴泛应⽤,充分显⽰出它的巨⼤潜⼒,在微电⼦学技术中独树⼀帜。
CCD已被普遍认为是七⼗年代以来出现的最重要的半导体器件之⼀。
和同样功能的电真空器件相⽐,CCD作为⼀种⾃扫描式光电接收器件,它有体积⼩、重量轻、分辨率⾼、灵敏度⾼、动态范围宽、⼯作电压低、功耗⼩、寿命长、抗震性和抗冲击性好、不受电磁场⼲扰和可靠性⾼等⼀系列优点。
因此它在科研、教育、医学、商业、⼯业、军事及消费等诸多领域都得到了⼴泛应⽤,已经成为图像采集及数字化处理必不可少的器件。
信息时代离不开语⾔、⽂字、图像的实时获取与交流。
如果把多媒体、各种⽹络和信息⾼速公路作为⼀个整体,那么CCD是它们的眼睛,是全球实时信息技术的关键器件。
当前我们的CCD⽣产技术相对较弱,也缺乏⼀种完善的测试、评价CCD性能的系统。
⽽CCD的种类越来越多,应⽤越来越⼴,如何正确地选择和使⽤CCD 是我们所要⾯对的问题。
根据我们的调查,还没有发现国内关于如何测试和评价CCD性能⽅⾯的研究结果。
⼆、发展状况CCD图像传感器经过30多年的发展⽬前⼰经成熟。
从最初简单的8像元移位寄存器发展⾄今,⼰经具有数百万甚⾄数千万像元。
CCD技术及相关的测试技术也有了巨⼤的改进。
最早出现的CCD为表⾯沟道型。
该表⾯构造可在Si-SiO2界⾯附近产⽣阻碍电荷运输的“陷阱”,从⽽降低了电荷传输效率。
DALSA线阵相机调焦、平场校正、⾏频微调【调焦】将相机设置成内部触发,使得相机在电脑显⽰屏上实时拍照。
铺设⿊⽩边界分明的薄卡⽚,使其在相机视野范围内,放⼤图⽚⾄能清晰分辨边缘像素。
缓慢旋转镜头,对焦,使得显⽰屏中图⽚的过度像素数量最低。
【平场校正】在相机视野下铺放纯⽩纸,采集图像。
打开曲线图。
选择 Line Profile 模式。
调节好相应所需的曝光时间、光源、增益和镜头光圈,让⽩平衡纸显⽰出来的灰度值⼤概在 150-200 左右。
在Calibration Algorithm 中将显⽰的数值设置好。
先暗场、再亮场。
Flat Field ⾥的 Mode,更改为 On。
FPN暗场:盖上镜头盖,拍摄⼀张暗场图⽚,采集完⿊⾊画⾯后,点击 FPN---press。
PRNU亮场:打开镜头盖,拍摄⼀张亮场图⽚(刚才的⽩纸),点击 FRNU---press平场校正完成后,⼀定记得关闭,Flat Field ⾥的 Mode,更改为 Off。
【⾏频微调】对于⾼精度测量,必须把⾏频调节到与速度完美匹配的状态。
使⽤标准回形板数像素的⽅式。
1、将相机设置成外触发。
2、载物台上铺设回形板,拍摄回形板。
放⼤回形板图⽚,任选回形板上⼀个正⽅形,记录其四个顶点的坐标(最好选择边长最长的正⽅形)。
计算正⽅形的边长和对⾓线的像素长度。
当其⽔平边长与竖直边长像素数不相等时,说明⾏频与速度不匹配,改变⾏频参数,尽量使其相等。
当其对⾓线像素数不相等时(excel中使⽤sqrt函数),说明相机与运动⽅向不完美垂直,左右轻微旋转相机的机⾝。
重新拍摄图⽚,并计算边长和对⾓线。
最终得到四条边长像素数在2个像素差之内,对⾓线像素数在2个像素差之内。
目录1.1相机和镜头的选型 (2)1.2线阵相机和镜头选型 (2)1.3图像采集卡、相机接口、PCI、PCI-E插槽的选型 . 3 1.4线阵相机、镜头、光源的选型详解 (4)1.5线阵相机与面阵相机的区别 (6)1.6工业相机的问与答 (9)线阵相机相关技术报告1.1 相机和镜头的选型1.1.1面阵相机和镜头的选型已知:被检测物体大小为A*B,要求能够分辨小于C ,工作距为D 解答:1. 计算短边对应的像素数 E = B/C ,相机长边和短边的像素数都要大于E ;2. 像元尺寸 = 物体短边尺寸B / 所选相机的短边像素数;3. 放大倍率 = 所选相机芯片短边尺寸 / 相机短边的视野范围;4. 可分辨的物体精度 = 像元尺寸 / 放大倍率 (判断是否小于C );5. 物镜的焦距 = 工作距离 / (1+1 / 放大倍率) 单位:mm ;6. 像面的分辨率要大于 1 / (2*0.1*放大倍率) 单位:lp mm ⁄;以上只针对镜头的主要参数进行计算选择,其他如畸变、景深环境等,可根据实际要求进行选择。
1.1.2针对速度和曝光时间的影响,物体是否有拖影已知:确定每次检测的范围为80mm*60mm ,200万像素 CCD 相机(1600*1200),相机或物体的运动速度为12m min ⁄ = 200mm s ⁄。
曝光时间计算:1. 曝光时间 < 长边视野范围 / (长边像素值 * 产品运动速度)2. 曝光时间 < 80 mm / (1600∗250 mm/s);3. 曝光时间 < 0.00025s = 14000 s ⁄;总结:故曝光时间要小于14000 s ⁄,图像才不会产生拖影。
1.2线阵相机和镜头选型1.2.1 相机的选型已知:幅宽 1600mm 、检测精度 1mm pixel ⁄、运动速度 22000mm s ⁄、物距1300mm ;解答:1. 相机像素数 = 幅宽/检测精度 = 1600mm / 1mm /pixel = 1600pixel ,2.最少2000个像素,选定为2k相机;3.扫描行频 = 运动速度/实际检测精度 = 22000mm /0.8mm = 27.5KHz应选定相机为2048像素28kHz相机,像元尺寸10um;1.2.2 镜头的选型1.Sensor 长度 = 像素宽度×像素数 = 0.01mm × 2048 = 20.48 mm ;2.镜头焦距 = sensor 长度×物距 / 幅宽 = 20.48×1300/1600 =16 mm;1.3图像采集卡、相机接口、PCI、PCI-E插槽的选型图像采集卡、相机接口、PCI、PCI-E插槽的选型如表 1-1、1-2所示:表1-1 相机接口表表1-2 PCI插槽类型表计算数字采集卡的数据率必须满足的要求可按下列公式计算:图像采集卡的数据率(又称点频)≥ 1.2 * 相机数据率;相机数据率(又称像素时钟)= 相机分辨率 * 相机帧频 * 相机的灰度级 / 8;插槽的带宽>图像采集卡的数据率>相机接口的带宽> 1.2 * 相机数据率;PCI插槽有PCI 32bit和PCI 64bit的区别。
64bit自然比32bit的长。
1.4线阵相机、镜头、光源的选型详解随着机器视觉的大规模普及与工业流水线速度、精度的提高,线扫描系统越来越被视觉工程师和最终用户所认可。
首先,我对线扫描系统做一个大致的介绍。
线扫描系统用于被测物体和相机之间有相对运动的场合,通过线扫描相机高速采集,每次采集完一条线后正好运动到下一个单位长度,继续下一条线的采集,这样一段时间下来就拼成了一张二维的图片,也就类似于面阵相机采集到的图片,不同之处是高度可以无限长。
接下来通过软件把这幅“无限长”的图片截成一定高度的图片,进行实时处理或放入缓存稍后进行处理。
视觉部分,包括线扫描相机、镜头、光源、图像采集卡和视觉软件;运动控制部分,包括马达, 马达驱动器, 运动控制卡或PLC,为了保证采集的图像与输送带同步,有时还会需要编码器。
由于线扫描信息量大,所以需要一台高性能的工控机,配置大容量的内存和硬盘,主板要提供PCI、PCI-E或PCI-X插槽。
一般来说,一个面阵视觉系统的配置选型是按照这样的顺序进行的:相机+采集卡->镜头->光源;线阵项目也类似,根据系统的检测精度和速度要求,确定线阵CCD相机分辨率和行扫描速度,同时确定对应的采集卡,只是需要选线阵相机镜头接口(mount)时同时考虑镜头的选型,最后确定光源的选型。
1.4.1线阵镜头的选型为什么在选相机时要考虑镜头的选型呢?常见的线阵相机分辨率目前有1K,2K,4K,6K,7K,8K,12K几种,像素大小有5μm、7μm、10μm、14μm几种,这样芯片的大小从10.240mm (1Kx10μm) 到86.016mm (12Kx7μm)不等。
很显然,C接口远远不能满足要求,因为C接口最大只能接22 mm 的芯片,也就是1.3inch。
而很多相机的接口为F,M42X1,M72X0.75等,不同的镜头接口对应不同的后背焦(Flange distance),也就决定了镜头的工作距离不一样。
光学放大倍率(β,Magnification)确定了相机分辨率和像素大小,就可以计算出芯片尺寸(Sensor size);芯片尺寸除以视野范围(FOV)就等于光学放大倍率,β=CCD/FOV;接口(Mount)主要有C、M42x1 、F、T2、Leica、M72x0.75等几种,确定了之后,就可知道对应接口的长度。
后背焦(Flange Distance)后背焦是指相机接口平面到芯片的距离,是一个非常重要的参数,由相机厂家根据自己的光路设计确定。
不同厂家的相机,哪怕是接口一样,也可能有不同的后背焦。
1.4.2线阵相机光源选型线扫描项目中,常用的光源主要有LED光源、卤素灯(光纤光源)、高频荧光灯,不同类型的光源的优点与缺点如下所述:1.卤素灯卤素灯也叫光纤光源,特点是亮度特别高,但缺点也很明显--寿命短,只有1000-2000小时左右,需要经常更换灯泡。
发光源是卤素灯泡,通过一个专门的光学透镜和分光系统,最后通过光纤输出,光源功率很大,可高达250瓦。
卤素灯还有一个名字叫冷光源,因为通过光纤传输之后,出光的这一头是不热的且色温稳定,适合用于对环境温度比较敏感的场合,比如二次元量测仪的照明。
用于线扫描的卤素灯,常常在出光口加上玻璃聚光镜头,进一步聚焦提高光源亮度。
对于较长的线光源,还用几组卤素光源同时为一根光纤提供照明。
2.高频荧光灯高频荧光灯,发光原理和日光灯类似,只是灯管是工业级产品,特点是适合大面积照明,亮度较高,成本低,但荧光灯最大的缺点是有闪烁、衰减速度快。
荧光灯一定需要高频电源,也就是光源闪烁的频率远高于相机采集图像的频率(对线扫描相机来说就是行扫描频率),消除图像的闪烁。
专用的高频电源可做到60KHz。
3.LED光源LED光源是目前主流的机器视觉光源。
特点是寿命长,稳定性好,功耗非常小:1)直流供电,无频闪;2)专业的LED光源寿命非常长。
(如美国AI的寿命50000小时亮度不小于50%);3)亮度也非常高,接近卤素灯的亮度,并且随着LED工艺的改善不断提高。
(目前美国AI线光源亮度高达90000LUX);4)可以灵活地设计成不同结构的线光源,如直射、带聚光透镜、背光、同轴以及类似于碗状的漫反射线光源;5)有多种颜色可选,包括红、绿、蓝、白,还有红外、紫外。
针对不同被测物体的表面特征和材质,选用不同颜色也就是不同波长的光源,获得更佳的图像;1.5线阵相机与面阵相机的区别1.5.1线阵相机主要应用于工业、医疗、科研与安全领域的图象处理。
在机器视觉领域中,线阵相机是一类特殊的视觉机器。
与面阵相机相比,它的传感器只有一行感光元素,因此使高扫描频率和高分辨率成为可能。
线阵相机的典型应用领域是检测连续的材料,例如金属、塑料、纸和纤维等。
被检测的物体通常匀速运动,利用一台或多台相机对其逐行连续扫描,以达到对其整个表面均匀检测。
可以对其图像逐行进行处理,或者对由多行组成的面阵图像进行处理。
另外线阵相机非常适合测量场合,这要归功于传感器的高分辨率,它可以准确测量到微米。
线阵相机,顾名思义是呈“线”状的。
虽然也是二维图像,但极长,几K的长度,而宽度却只有几个象素的而已。
一般上只在两种情况下使用这种相机:1:被测视野为细长的带状,多用于滚筒上检测的问题;2:需要极大的视野或极高的精度。
在第二种情况下(需要极大的视野或极高的精度),就需要用激发装置多次激发相机,进行多次拍照,再将所拍下的多幅“条”形图像,合并成一张巨大的图。
因此,用线阵型相机,必须用可以支持线阵型相机的采集卡。
线阵型相机价格贵,而且在大的视野或高的精度检测情况下,其检测速度也慢--一般相机的图像是400K~1M,而合并后的图像有几个M这么大,速度自然就慢了。
由于以上这两个原因,线阵相机只用在极特殊的情况下。
1.5.2面阵相机相机像素是指这个相机总共有多少个感光晶片,通常用万个为单位表示,以矩阵排列,例如300W像素、200W像素、40W像素。
百万像素相机的像素矩阵为W*H=1000*1000。
相机分辨率,指一个像素表示实际物体的大小,用μm∗μm表示。
数值越小,分辨率越高FOV是指相机实际拍摄的面积,以毫米×毫米表示。
FOV是由像素多少和分辨率决定的。
相同的相机,分辨率越大,它的FOV就越小。
例如1K*1K的相机,分辨率为20μm,则他的FOV=1K*20×1k*20=20mm×20mm,如果用30μm的分辨率,他的FOV=1K*30×1k*30 = 30mm×30mm。
在图像中,表现图像细节不是由像素多少决定的,而是由分辨率决定的。
分辨率是由选择的镜头焦距决定的,同一种相机,选用不同焦距的镜头,分辨率就不同。
如果采用20μm分辨率,对于1mm*0.5mm的零件,它总共占用像素1/0.02×0.5/0.02=50×25个像素,如果采用30μm的分辨率,表示同一个元件,则有1/0.03×0.5/0.03=33×17个像素,显然20μm的分辨率表现图像细节方面好过30μm的分辨率。
既然像素的多少不决定图像的分辨率(清晰度),那么大像素相机有何好处呢?答案只有一个:减少拍摄次数,提高测试速度。
1个是100W像素,另1个是300W像素,清晰度相同(分辨率均为20μm),第1个相机的FOV是20mm×20mm=400平方mm,第二个相机的FOV是1200平方mm,拍摄同一个PCB,假设第1个相机要拍摄30个图像,第2个相机则只需拍摄10个图像就可以了。