激光雷达发射和接收光学系统研究
- 格式:pdf
- 大小:3.25 MB
- 文档页数:73
激光雷达的工作原理与信号处理激光雷达(Light Detection and Ranging,简称LiDAR)是一种利用激光束探测目标并测量其距离、速度和方向等信息的技术。
它在自动驾驶、环境监测、地图绘制等领域得到广泛应用。
本文将探讨激光雷达的工作原理以及信号处理方面的内容。
一、激光雷达的工作原理激光雷达通过发射一束窄束激光,然后测量激光束被目标物体反射后返回的时间和强度,从而实现测量目标物体的距离和形状等信息。
其工作原理可以分为激光发射、目标反射和激光接收三个过程。
1. 激光发射:激光雷达通过激光发射器发射一束激光束。
一般而言,激光雷达会采用红外激光作为发射光源,因为红外激光有较好的穿透能力和抗干扰性。
2. 目标反射:激光束照射到目标物体上后,会被目标反射回来。
目标物体的形状、颜色和表面材质等因素会影响激光的反射情况。
3. 激光接收:激光雷达接收到目标反射回来的激光束,并通过接收器将激光信号转换为电信号进行处理。
接收器通常包括光电二极管和放大器等组件,用于接收和放大反射信号。
二、激光雷达信号处理激光雷达通过对接收到的激光信号进行处理,可以获得目标物体的距离、速度和方向等信息。
信号处理在激光雷达系统中起着重要的作用,是激光雷达工作的关键环节。
1. 距离测量:利用激光束的发射和接收时间差,可以计算出目标物体与激光雷达之间的距离。
一般来说,激光雷达系统会使用飞行时间(Time of Flight)或相位差测量法(Phase Shift)来实现精确的距离测量。
2. 速度测量:通过分析接收到的激光信号的频率变化,可以获得目标物体的速度信息。
激光雷达通常采用多普勒效应来实现速度测量,即利用光频移变化进行速度测量。
3. 方向测量:利用激光雷达的扫描方式,即通过旋转或扫描来覆盖整个空间,可以获得目标物体的方向信息。
通常情况下,激光雷达会采用机械扫描或电子扫描的方式进行方向测量。
4. 数据处理:激光雷达系统会通过采样和数字信号处理技术对接收到的激光信号进行滤波、去噪和数据分析等处理。

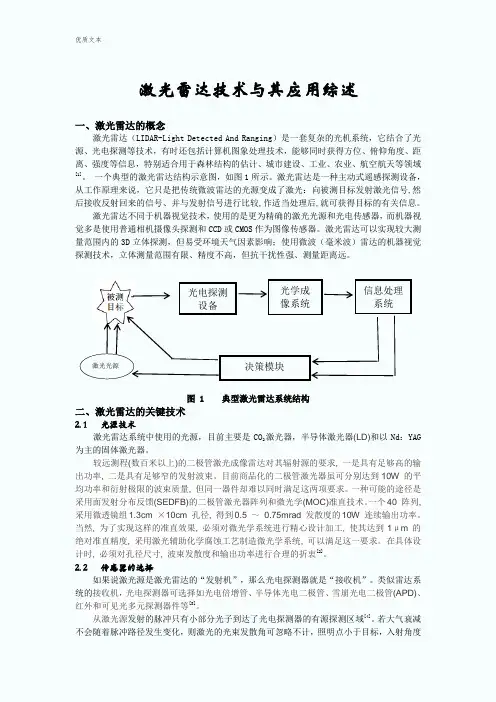
激光雷达技术与其应用综述一、激光雷达的概念激光雷达(LIDAR-Light Detected And Ranging )是一套复杂的光机系统,它结合了光源、光电探测等技术,有时还包括计算机图象处理技术,能够同时获得方位、俯仰角度、距离、强度等信息,特别适合用于森林结构的估计、城市建设、工业、农业、航空航天等领域[1]。
一个典型的激光雷达结构示意图,如图1所示。
激光雷达是一种主动式遥感探测设备,从工作原理来说,它只是把传统微波雷达的光源变成了激光:向被测目标发射激光信号,然后接收反射回来的信号、并与发射信号进行比较,作适当处理后,就可获得目标的有关信息。
激光雷达不同于机器视觉技术,使用的是更为精确的激光光源和光电传感器,而机器视觉多是使用普通相机摄像头探测和CCD 或CMOS 作为图像传感器。
激光雷达可以实现较大测量范围内的3D 立体探测,但易受环境天气因素影响;使用微波(毫米波)雷达的机器视觉探测技术,立体测量范围有限、精度不高,但抗干扰性强、测量距离远。
图 1 典型激光雷达系统结构二、激光雷达的关键技术2. 1 光源技术激光雷达系统中使用的光源,目前主要是CO 2激光器,半导体激光器(LD)和以Nd :YAG 为主的固体激光器。
较远测程(数百米以上)的二极管激光成像雷达对其辐射源的要求, 一是具有足够高的输出功率, 二是具有足够窄的发射波束。
目前商品化的二极管激光器虽可分别达到10W 的平均功率和衍射极限的波束质量, 但同一器件却难以同时满足这两项要求。
一种可能的途径是采用面发射分布反馈(SEDFB)的二极管激光器阵列和微光学(MOC)准直技术。
一个40 阵列, 采用微透镜组1.3cm ×10cm 孔径, 得到0.5 ~ 0.75mrad 发散度的10W 连续输出功率。
当然, 为了实现这样的准直效果, 必须对微光学系统进行精心设计加工, 使其达到1μm 的绝对准直精度, 采用激光辅助化学腐蚀工艺制造微光学系统, 可以满足这一要求。
北洋激光雷达说明书北洋激光雷达是一种高精度、高分辨率的三维激光扫描系统,主要用于室内和室外的环境感知、建图和定位。
本说明书将为用户提供有关北洋激光雷达的详细说明和使用指南。
一、系统构成北洋激光雷达主要由激光发射器、接收器、光学系统、扫描控制系统、数据处理系统等部分组成。
激光发射器:北洋激光雷达采用固态激光发射器,发射波长为905nm,具有高功率、高效率、长寿命等特点。
接收器:北洋激光雷达采用高灵敏度、高分辨率的接收器,能够准确接收反射回来的激光信号。
光学系统:北洋激光雷达采用高质量的光学系统,具有高透过率、低散射率、高反射率等优点,能够保证高精度的扫描结果。
扫描控制系统:北洋激光雷达采用高速电机和精密控制系统,能够实现高速、高精度的扫描。
数据处理系统:北洋激光雷达采用高性能的处理器和专业的算法软件,能够实现快速、准确的数据处理和分析。
二、使用方法1. 连接设备:将北洋激光雷达与电脑或其他设备连接。
2. 启动设备:按下电源开关,启动设备。
3. 调整参数:根据需要,调整扫描参数,如扫描速度、扫描角度、扫描分辨率等。
4. 开始扫描:按下扫描按钮,开始进行扫描。
5. 获取数据:扫描完成后,可以通过数据接口获取扫描数据。
6. 数据处理:使用专业的数据处理软件,对扫描数据进行处理和分析。
三、使用注意事项1. 使用前,请先仔细阅读本说明书,了解设备的使用方法和注意事项。
2. 在使用设备时,应注意安全,避免直接照射人眼。
3. 在使用设备时,应注意保护设备,避免碰撞和摔落。
4. 在使用设备时,应注意环境光的影响,避免在强光环境下使用。
5. 在使用设备时,应注意保持设备干燥、清洁。
6. 在使用设备时,应避免在易爆、易燃的环境中使用。
四、使用范围北洋激光雷达主要应用于室内和室外的环境感知、建图和定位,适用于机器人导航、智能制造、智慧城市、安防监控等领域。
五、总结本说明书为用户提供了北洋激光雷达的详细说明和使用指南,希望能够帮助用户更好地理解和使用北洋激光雷达。
简述激光雷达的结构、原理、分类及特点。
激光雷达是一种高精度、高分辨率、高可靠性的测量设备,广泛应用于自动驾驶、地形测量、工业检测等领域。
本文将从激光雷达的结构、原理、分类及特点等方面进行简述。
一、激光雷达的结构激光雷达通常由激光器、光学系统、控制系统、接收器、信号处理器等组成。
1. 激光器:激光器是激光雷达的核心部件,通常采用半导体激光器或固体激光器,能够发射高功率、高频率的激光束。
2. 光学系统:光学系统包括发射光学系统和接收光学系统。
发射光学系统负责将激光束聚焦成一束细小的光束,以便将激光束精确地照射到目标物体上。
接收光学系统负责收集目标物体反射回来的激光信号,并将其转化为电信号。
3. 控制系统:控制系统是激光雷达的智能核心,负责控制激光器的发射和接收,以及激光束的聚焦和扫描。
4. 接收器:接收器是激光雷达的另一个核心部件,负责接收目标物体反射回来的激光信号,并将其转化为电信号。
接收器的性能直接影响激光雷达的精度和分辨率。
5. 信号处理器:信号处理器负责对接收到的激光信号进行处理和分析,提取目标物体的位置、距离、速度等信息,并将其传递给控制系统进行下一步处理。
二、激光雷达的原理激光雷达的原理是利用激光束与目标物体之间的相互作用,通过测量激光束的反射或散射来确定目标物体的位置、距离、速度等信息。
当激光束照射到目标物体上时,部分激光束会被目标物体吸收,部分激光束会被目标物体反射或散射。
接收器收集到反射或散射的激光信号后,通过计算激光束的传播时间和速度,可以确定目标物体的距离和速度。
同时,通过对激光束的反射或散射特征进行分析,可以确定目标物体的位置、形状等信息。
三、激光雷达的分类激光雷达可以按照使用的激光类型、扫描方式、工作原理等多种方式进行分类。
以下是常见的分类方式:1. 激光类型:根据激光类型的不同,激光雷达可以分为固体激光雷达和半导体激光雷达。
固体激光雷达通常使用固体材料作为激光介质,具有高功率、高频率等优点;半导体激光雷达通常使用半导体材料作为激光介质,具有体积小、功耗低等优点。
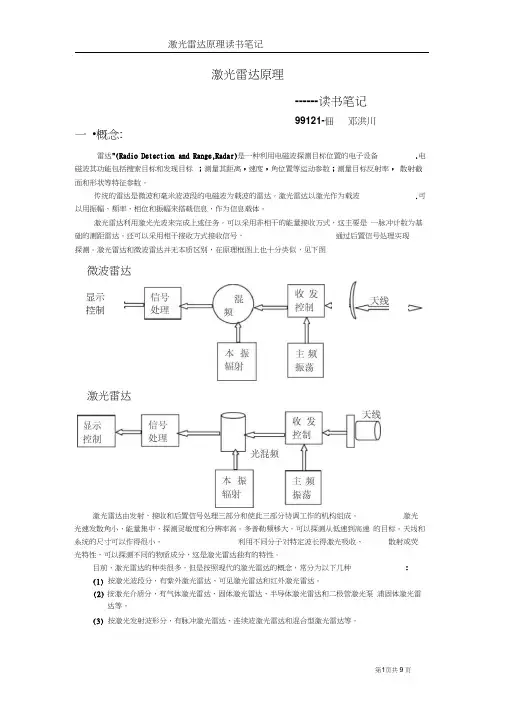
激光雷达原理------读书笔记99121-佃邓洪川一•概念:雷达"(Radio Detection and Range,Radar)是一种利用电磁波探测目标位置的电子设备.电磁波其功能包括搜索目标和发现目标;测量其距离,速度,角位置等运动参数;测量目标反射率,散射截面和形状等特征参数。
传统的雷达是微波和毫米波波段的电磁波为载波的雷达。
激光雷达以激光作为载波.可以用振幅、频率、相位和振幅来搭载信息,作为信息载体。
激光雷达利用激光光波来完成上述任务。
可以采用非相干的能量接收方式,这主要是一脉冲计数为基础的测距雷达。
还可以采用相干接收方式接收信号,通过后置信号处理实现探测。
激光雷达和微波雷达并无本质区别,在原理框图上也十分类似,见下图微波雷达显示控制激光雷达激光雷达由发射,接收和后置信号处理三部分和使此三部分协调工作的机构组成。
激光光速发散角小,能量集中,探测灵敏度和分辨率高。
多普勒频移大,可以探测从低速到高速的目标。
天线和系统的尺寸可以作得很小。
利用不同分子对特定波长得激光吸收、散射或荧光特性,可以探测不同的物质成分,这是激光雷达独有的特性。
目前,激光雷达的种类很多,但是按照现代的激光雷达的概念,常分为以下几种:(1)按激光波段分,有紫外激光雷达、可见激光雷达和红外激光雷达。
(2)按激光介质分,有气体激光雷达、固体激光雷达、半导体激光雷达和二极管激光泵浦固体激光雷达等。
(3)按激光发射波形分,有脉冲激光雷达、连续波激光雷达和混合型激光雷达等。
(4)按显示方式分,有模拟或数字显示激光雷达和成像激光雷达。
(5)按运载平台分,有地基固定式激光雷达、车载激光雷达、机载激光雷达、船载激光雷达、星载激光雷达、弹载激光雷达和手持式激光雷达等。
(6)按功能分,有激光测距雷达、激光测速雷达、激光测角雷达和跟踪雷达、激光成像雷达,激光目标指示器和生物激光雷达等。
(7)按用途分,有激光测距仪、靶场激光雷达、火控激光雷达、跟踪识别激光雷达、多功能战术激光雷达、侦毒激光雷达、导航激光雷达、气象激光雷达、侦毒和大气监测激光雷达等。

相干测风激光雷达系统设计及数据处理算法研究共3篇相干测风激光雷达系统设计及数据处理算法研究1相干测风激光雷达系统设计及数据处理算法研究激光测风雷达是一种基于激光干涉原理,用于实现大气风场气动参数快速测量与反演的先进技术手段。
本文将介绍一种相干测风激光雷达系统的设计及数据处理算法研究。
一、相干测风激光雷达系统的设计风场参数反演的精度、可靠性和实时性直接关系到气象预报的准确性。
相干测风激光雷达系统采用一束激光器产生的激光束照射到目标区域中,利用散射光的特性实现对目标中各个高度层次风场参数的测量。
该系统主要由激光发射器、光学系统、探测器、机械结构和信号处理模块等部分组成,其中激光器产生的激光束由光学系统实现照射目标,探测器采集返回的散射光信号并将其转换为电信号,机械结构可以实现雷达的扫描,信号处理模块对采集到的信号进行处理。
二、数据处理算法研究相干测风激光雷达系统采集的数据是获得风场参数的重要依据,因此数据处理算法的设计对于反演结果的准确性有着直接的影响。
本文研究的数据处理算法主要有多普勒谱分析算法、最小二乘法反演算法和平均滤波算法等。
1. 多普勒谱分析算法多普勒谱分析将时域信号转换为频域信号,可以分析目标物体在不同时刻的静态和动态特性,可以有效提取目标物体的速度信息,从而实现风场参数的反演。
该算法通过计算散射光频谱的谱宽来获取目标物体的运动速度信息。
2. 最小二乘法反演算法该算法通过对扫描目标附近某一层数据的最小二乘拟合,计算得到该层的风场参数,从而实现风场参数的反演。
该算法对目标物体反射信号的形态及信噪比等要求较高,但可以有效提高反演的准确性。
3. 平均滤波算法该算法通过对一定范围内数据的平均值进行计算,从而抑制噪声干扰,提高数据的可靠性。
该算法是一种简单有效的数据处理算法,在反演速度场等定量测量中得到了广泛应用。
三、结论相干测风激光雷达系统是一种先进的风场参数反演技术,其数据处理算法的设计是实现精确反演的关键。
激光雷达工作原理与气象探测王 保 成(江苏徐州空军后勤学院 徐州 221000)张 卫 华(民航徐州导航站 江苏 221000) 激光是20世纪60年代出现的最重大科学技术成就之一。
它的出现深化了人们对光的认识,扩大了光为人类服务的天地。
激光技术从它的问世到现在,虽然时间不长,但是由于它有着几个极有价值的特点:高亮度性、高方向性、高单色性和高相干性,因而无论在国防军事、工农业生产、医学卫生和科学研究等方面都有广泛的应用。
激光雷达是将激光技术、高速信息处理技术和计算机技术等尖端技术相结合的产物。
一、激光雷达的工作原理激光雷达主要由发射、接收、测量控制和电源4部分组成。
其工作原理是,激光雷达先向目标方向发射激光探测信号,光标碰到信号后被反射回来形成回波。
由于回波经历的时间等参数恰好反映了接近目标的情况和运动状态的变化,所以通过测量回波信号的到达时间、频率变化和波束所指方向等,就可以确定目标的距离、方位和速度等。
二、激光雷达在气象探测方面的应用由于激光雷达具有识别能力强、测量精度高、抗干扰性能好、盲区小、反应快等优点,因而被广泛用于探测湿、温、风、压等基本参数,并实现了对那些威胁飞行安全的能见度、低云等疑难参数的遥测,所以在气象探测领域有着广泛的应用。
1.在测云方面的应用测云是激光最早的应用之一。
用激光可以探测云底高、云厚和云的层次,这对天气分析和航空飞行均有实际意义。
激光测云的优点是测量精度不随高度而变,精度一般可控制在10米以内。
法集中,情绪上恐惧不安,还会引起头痛、恶心、晕眩;严重时使人神经错乱,癫狂不止,休克昏厥,丧失思维能力。
当次声波频率和人体内脏器官的固有频率(4Hz —18Hz )相当时,将会使人的五脏六腑产生强烈共振,轻者肌肉痉挛、全身颤抖、呼吸困难;重者血管破裂、内脏损伤,基层迅速死亡。
1968年的一天傍晚,一些正在田间操作和使用晚餐的法国农民突然失去知觉;几十秒以后就死亡了。
究其原因是16千米外马赛附近的法国国防部次声试验所正在进行次声武器试验,由于不慎将次声波泄漏了出去。
tof激光雷达原理TOF激光雷达是一种利用激光束测量物体距离的传感器。
TOF代表“飞行时间”,因为这种雷达使用激光脉冲并测量从发射到接收激光脉冲返回所需的时间来计算物体的距离。
TOF激光雷达主要由以下几个部分组成:1. 激光发射器:产生短脉冲的激光束,通常使用红外线或近红外线。
2. 光学系统:将激光束聚焦成一个小点,并将其投射到需要测量距离的物体上。
3. 接收器:接收从物体反射回来的激光脉冲,并将其转换为电信号。
4. 时钟和控制电路:控制发射和接收时间,以及计算物体与传感器之间的距离。
TOF激光雷达的工作原理如下:1. 发送短脉冲激光束,经过光学系统聚焦后照射到目标上。
2. 激光束被目标反射后返回传感器。
3. 接收器接收到反射回来的激光脉冲,并将其转换为电信号。
4. 时钟和控制电路记录下激光发射和接收的时间,计算出激光束从发射到接收所需的时间。
5. 根据光速和时间计算出物体与传感器之间的距离。
TOF激光雷达具有以下优点:1. 高精度:TOF激光雷达可以测量物体与传感器之间的距离,精度高达毫米级别。
2. 高速:TOF激光雷达可以在很短的时间内完成一次测量,通常只需要几纳秒。
3. 不受环境影响:TOF激光雷达可以在各种环境下工作,例如强日光、雨雪等恶劣天气条件下仍能正常工作。
4. 多目标检测:TOF激光雷达可以同时检测多个目标,因此在自动驾驶、机器人导航等领域得到广泛应用。
总之,TOF激光雷达是一种高精度、高速、不受环境影响且具有多目标检测功能的传感器。
它已经被广泛应用于自动驾驶、机器人导航、智能家居等领域,并在未来的发展中将会有更广泛的应用。
1.激光雷达工作在红外和可见光波段的雷达称为激光雷达。
它由激光发射机、光学接收机、转台和信息处理系统等组成,激光器将电脉冲变成光脉冲发射出去,光接收机再把从目标反射回来的光脉冲还原成电脉冲,送到显示器。
2.激光雷达是以发射激光束探测目标的位置、速度等特征量的雷达系统。
从工作原理上讲,与微波雷达没有根本的区别:向目标发射探测信号(激光束),然后将接收到的从目标反射回来的信号(目标回波)与发射信号进行比较,作适当处理后,就可获得目标的有关信息,如目标距离、方位、高度、速度、姿态、甚至形状等参数,从而对飞机、导弹等目标进行探测、跟踪和识别。
3.激光雷达的特点,与普通微波雷达相比,激光雷达由于使用的是激光束,工作频率较微波高了许多,因此带来了很多特点,主要有:①分辨率高②隐蔽性好、抗有源干扰能力强③低空探测性能好④体积小、质量轻。
4.激光雷达的缺点:首先,工作时受天气和大气影响大。
激光一般在晴朗的天气里衰减较小,传播距离较远。
而在大雨、浓烟、浓雾等坏天气里,衰减急剧加大,传播距离大受影响。
其次,由于激光雷达的波束极窄,在空间搜索目标非常困难,直接影响对非合作目标的截获概率和探测效率,只能在较小的范围内搜索、捕获目标,因而激光雷达较少单独直接应用于战场进行目标探测和搜索。
5.雷达测距机理测量电磁波往返雷达与目标之间的时间。
①对单基地雷达,设光速为c ,电磁波往返雷达与目标的时间为TR ,则目标相对雷达的距离R 为: 据上述公式可得1微秒(μs)对应150米(m),式中数字2表示收发双程。
②对双基地雷达,计算RT+RR 有两种方法:直接法: 间接 法:6.距离分辨力:距离分辨力是指同一方向上两个大小相等点目标之间最小可区分距离,它取决于雷达信号波形。
7.雷达测距范围:测距范围:包括最小可测距离和最大单值测距范围。
最小可测距离——指雷达能测量的最近目标的距离。
脉冲雷达收发共用天线,在发射脉冲宽度τ时间内,接收机和天线馈线系统间是断开的,不能正常接收目标回波。
(1)基于激光雷达的移动机器人位姿估计方法综述位姿估计方法是移动机器人研究的一个核心问题,精确地位姿估计对于机器人的定位、自动地图生成、路径规划等具有重要意义。
传统的位姿估计方法在不同程度上都有位移误差较大、成本较高的缺点。
而激光雷达刚好解决了这个问题。
目前常用的激光雷达为2维脉冲式激光雷达,这种方法有两个重要的步骤:距离数据的表示和距离数据的对应。
数据的表示。
利用一对脉冲近红外发射器和接收器,通过测量发射到接受的时间差,即可计算出目标的距离,从而得到关于环境的水平剖面图。
对于静态环境的表示方法目前比较好的方法是Gonzalez提出的混合式表达方法,这种方法综合了基于特征的表示方法和占据网格的表示方法而提出的一种同时具有两者各自优点的方法。
距离数据的对应。
目前已有的对应方法有特征—特征、点—特征和点—点等。
以下主要介绍三类。
特征—特征对应方法首先从参考扫描和当前扫描中分别抽取出一组特征,然后是用特征的属性和特征间相对关系对两组特征进行匹配,得到一组特征对,最后使用迭代的方法求解机器人的位姿,使特征对之间的误差最小。
点—特征与特征—特征方法的不同主要在于它直接使用当前的原始数据与参考扫描的特征进行匹配,匹配的依据是点到线段的距离。
由于这种方法在匹配中直接使用了原始的距离数据,避免了中间的特征抽取过程,因此这种方法的精度略高于特征—特征方法。
点对点的方法是利用一个合适的规则直接匹配2个扫描中的数据,从而得到相对位姿的关系,目前这个常用的规则是最近点规则。
(2)激光雷达技术在城市三维建筑模型中的应用“数字城市”是数字地球技术系统的重要组成部分,而表达城市主要物体的三维模型包括三维地形,三维建筑模型、三维管线模型。
这些三维建筑模型是数字城市重要的基础信息之一。
而激光雷达技术可以快速完成三维空间数据采集,它的优点使它有很广阔的应用前景。
机载雷达系统的组成包括:激光扫描器、高精度惯性导航仪、应用查分技术的全球定位系统、高分辨率数码相机。