非扫描测风激光雷达光学系统设计
- 格式:pdf
- 大小:3.69 MB
- 文档页数:7
光学激光雷达的系统设计与性能分析随着自动驾驶、智能交通等技术的不断发展,激光雷达(Lidar)作为一种高精度、高可靠性的传感器逐渐成为自动驾驶及智能交通领域的核心探测器。
其中光学激光雷达采用激光束照射目标物体,利用激光反射回来的信号来获取物体的三维空间信息,具有高精度、高分辨率、高刷新率等优点,被广泛应用于自动驾驶、物流仓储、环境监测等领域。
在光学激光雷达的系统设计中,主要考虑以下几个方面:1. 光学激光雷达结构设计光学激光雷达的结构通常包括激光器、光学系统、光电转换器和信号处理器等几个组成部分。
其中激光器需要具有较高的功率和短脉冲宽度,以保证充足的激光能量和高的精度。
光学系统包括发射光路和接收光路,需要设计成较小的视场角和高的分辨率,以保证传感器的空间视野和精度。
光电转换器用于将光信号转化成电信号,其性能关系到信噪比和探测距离。
信号处理器用于对接收到的光学数据进行处理和分析,以得到目标附加信息,如距离、速度、角度、形状等。
2. 光电器件和电路设计它们的选择和设计是影响系统性能的重要因素。
对于发射部分,采用高功率、短脉冲宽度的激光器;对于接收部分,采用双脉冲共振器、自适应增益电路等技术来提高信噪比和增加探测距离,同时对于光电转换器,采用高分辨率、高响应速度、低暗电流、低漏光的器件。
对于信号处理器,采用多通道、高速、低功耗处理器以实现快速、实时接收、处理和存储光学数据,并提取出各种附加信息。
3. 外壳设计和制造外壳是保护设备免受损坏和干扰的关键所在。
它应设计成符合工业标准,能够抵抗外界的干扰和震动。
同时,为了在操作和维护中易于操作和维护,外壳还需要具有合适的尺寸和重量。
在性能分析方面,光学激光雷达的性能主要关系到以下几个因素:1. 视场范围视场范围是指激光雷达能够监测到的物体空间范围。
它与激光雷达的视场角、扫描速度等参数有关。
较宽的视场角可以提高系统的监测范围和检测效率。
2. 分辨率分辨率是指激光雷达能够分辨出空间物体的最小尺寸,与激光束的射线密度、光谱范围、激光波长等参数有关。
40km测风激光雷达系统的研制与风场观测的开题报告摘要:本文研究的是一种40km测风激光雷达系统的研制和风场观测,旨在提供一种可靠的手段用于高空风场的观测。
系统共分为两个部分,一是硬件系统,包括光路设计和激光发射器系统、光学探测器系统、数据采集和处理系统;二是软件系统,包括对实时数据进行处理和分析的软件算法以及图像显示和数据分析的软件界面。
本文介绍了系统的设计原理和工作流程,详细阐述了各个部分的技术原理和实现方法。
同时,为了验证系统的可靠性和有效性,本文还介绍了在实验过程中所采集到的数据,并进行了数据分析和处理。
最终结果表明,该40km测风激光雷达系统在风场观测中表现出了良好的性能和可靠性,以及优异的数据处理和分析能力。
关键词:40km测风激光雷达系统;风场观测;硬件系统;软件系统;数据处理和分析。
一、研究背景:高空风场的观测一直是大气科学和气象学研究的重要方向之一。
特别是在航天、飞机、气象和环境等领域,高空风场的观测需要更长距离、更高分辨率、更高精度的数据。
传统的风场观测方法主要是基于浮标、气球、探空气球和卫星等,这些方法的成本很高,受天气和环境因素的影响较大,并且有一定的局限性。
因此,需要一种更加高效和精确的风场观测手段。
二、研究目的:基于现有的激光雷达技术,研制一种40km测风激光雷达系统,实现高空风场的观测,并实现对观测数据的处理和分析。
该系统能够实时监测高空风场的变化和演化,提供一种可靠的手段为气象、航空航天、环境等领域的应用提供精确、实时的数据。
三、研究内容与方法:根据研究目的,我们设计了一种40km测风激光雷达系统,包括硬件系统和软件系统两个部分。
硬件系统主要包括光路设计和激光发射器系统、光学探测器系统、数据采集和处理系统。
光路设计是系统设计的核心部分,需要考虑到不同高度风场的变化、大气折射率的差异等因素,以使得系统能够正确地反映高空风场的分布和变化。
激光发射器系统主要负责输出激光光源。
激光雷达光学设计流程As the demand for advanced optical systems continues to grow, the design process for laser radars has become increasingly important. 激光雷达作为一种先进的光学系统,其设计流程变得越来越重要。
The optical design process for a laser radar involves several key steps that are fundamental to the system’s performance. 激光雷达的光学设计流程涉及几个关键步骤,这些步骤对系统的性能起着基本作用。
From the conceptualization to the final manufacturing steps, the optical design process plays a crucial role in ensuring the functionality and accuracy of the laser radar. 从构思到最终制造步骤,光学设计流程对确保激光雷达的功能和精准度起着至关重要的作用。
One of the initial steps in the optical design process for a laser radar is the determination of the system requirements. 在激光雷达的光学设计流程中,确定系统要求是最初的步骤之一。
This involves identifying the specific parameters that the laser radar needs to meet, such as range, resolution, and precision. 这涉及确定激光雷达需要满足的具体参数,如测距、分辨率和精度。
激光扫描显示装置的光学设计和系统MTF
Hrey,H;汪世祯
【期刊名称】《云光技术》
【年(卷),期】2000(032)005
【摘要】虚拟视网膜显示(VRD)是由微视有限公司开发的一项新型显示技术,使用小功率的红、绿和蓝色光源将显示的图象扫描至观察者的视网膜上,微视公司设计的具有专利权的小型扫描器使VRD非常适合于头盔显示装置。
本文将讨论VRD技术的一些优点,用于头灰显示和其他应用场合的各种目镜设计,组建用于激光扫描装置的系统MTF详细安排,包括电子线路、调制器、扫描器和光学系统。
【总页数】12页(P15-26)
【作者】Hrey,H;汪世祯
【作者单位】不详;不详
【正文语种】中文
【中图分类】TN141
【相关文献】
1.CR扫描仪激光扫描光学系统的设计 [J], 郑猛;冯其波;邵双运;丁克勤
2.《光学系统设计》应用型课程教学设计——以激光扫描系统为例 [J], 马堃;焦铮
3.非扫描测风激光雷达光学系统设计 [J], 彭章贤;刘博;岳永坚
4.共聚焦激光扫描显微系统光学设计 [J], 肖海东;吴永前
5.激光扫描光学断层成像系统的设计与应用 [J], 薛成志;李亚敏;李贵叶;李颖超;胡
学娟;陈玲玲
因版权原因,仅展示原文概要,查看原文内容请购买。
一款新型风机分体式测风激光雷达的系统设计摘要:风机分体式测风激光雷达是一种基于多普勒效应以激光传感技术和测距技术相结合的远程探测器。
利用激光的多普勒效应,测量出大气中气溶胶粒子后向散射信号的多普勒频移,可以实现对大气风场的测量。
本项目的应用方向为风力发电机前端近距离风场的探测,根据实际应用要求,设计为四光路输出,采用分时发射的方案,可以合成计算出风力发电机轴向水平风速、风向和垂直风速、风向,机械结构上采用分体、微缩的方式,以适应恶劣、复杂多变的环境。
关键词:风机多普勒效应测风激光雷达风场绪论当前,风电行业面临新形势下的改革需求,主要矛盾是综合成本高,能源利用比低,制约了各地大规模应用,传统电力体制机制已不能适应新能源发展思路。
众所周知,原始传统风机多靠安装在机舱顶部的风速计对风场进行实时测量,将采集到的水平风速和风向传输给主控系统,但是这种方式无法适应风场变化时尤其是突变等情况。
在风能行业,以激光为基础的测风传感器己经成为传感测风设备的一种补充。
激光测风雷达的独特之处在于其精确地测量远处的风速和风向的能力。
在风还未到达叶片之前就能在机舱的顶部精确地测定风向与风速。
有了这些数据,风机就可以根据风况提前调整风机状态,这样必然会带来发电量的上升,同时也减少了风机部件的磨损[1]。
一、整体思路1、设计定位本项目应用于风力发电机前端近距离风速和风向的探测,结合目前已有的技术(信号采集技术、软件技术),只对系统设计、光路设计和机械设计详细展现,其他调试、测试部分、附属包装等和非项目设计的部分省略。
本项目采用相干探测的方法进行多普勒频移测定并完成风场的测量,与直接探测的最大不同点在于探测原理的不同。
相干探测法是将微弱的多普勒频移信号与较强的本振信号混合在一起通过拍频的方式提取出来,而直接探测法是直接将发射激光回波信号的频率转换为能量的相对变化实现对大气风场多普勒频移的测量[2]。
理论上相干探测比直接探测要简单许多,测量数据精准,探测距离远。
相干测风激光雷达系统设计及数据处理算法研究共3篇相干测风激光雷达系统设计及数据处理算法研究1相干测风激光雷达系统设计及数据处理算法研究激光测风雷达是一种基于激光干涉原理,用于实现大气风场气动参数快速测量与反演的先进技术手段。
本文将介绍一种相干测风激光雷达系统的设计及数据处理算法研究。
一、相干测风激光雷达系统的设计风场参数反演的精度、可靠性和实时性直接关系到气象预报的准确性。
相干测风激光雷达系统采用一束激光器产生的激光束照射到目标区域中,利用散射光的特性实现对目标中各个高度层次风场参数的测量。
该系统主要由激光发射器、光学系统、探测器、机械结构和信号处理模块等部分组成,其中激光器产生的激光束由光学系统实现照射目标,探测器采集返回的散射光信号并将其转换为电信号,机械结构可以实现雷达的扫描,信号处理模块对采集到的信号进行处理。
二、数据处理算法研究相干测风激光雷达系统采集的数据是获得风场参数的重要依据,因此数据处理算法的设计对于反演结果的准确性有着直接的影响。
本文研究的数据处理算法主要有多普勒谱分析算法、最小二乘法反演算法和平均滤波算法等。
1. 多普勒谱分析算法多普勒谱分析将时域信号转换为频域信号,可以分析目标物体在不同时刻的静态和动态特性,可以有效提取目标物体的速度信息,从而实现风场参数的反演。
该算法通过计算散射光频谱的谱宽来获取目标物体的运动速度信息。
2. 最小二乘法反演算法该算法通过对扫描目标附近某一层数据的最小二乘拟合,计算得到该层的风场参数,从而实现风场参数的反演。
该算法对目标物体反射信号的形态及信噪比等要求较高,但可以有效提高反演的准确性。
3. 平均滤波算法该算法通过对一定范围内数据的平均值进行计算,从而抑制噪声干扰,提高数据的可靠性。
该算法是一种简单有效的数据处理算法,在反演速度场等定量测量中得到了广泛应用。
三、结论相干测风激光雷达系统是一种先进的风场参数反演技术,其数据处理算法的设计是实现精确反演的关键。
面向车载导航激光雷达的光学系统优化设计华云飞发布时间:2023-06-18T11:49:20.216Z 来源:《中国科技人才》2023年7期作者:华云飞[导读] 在智能车载激光雷达导航系统中,为了在不改变光学系统尺寸的条件下尽量提高激光回波信号检测能力,对激光雷达的光学发射接收模块进行了优化设计。
通过ZAMAX完成了非球面面形参数设计。
河北省石家庄市新华区学府路135号 050000摘要:在智能车载激光雷达导航系统中,为了在不改变光学系统尺寸的条件下尽量提高激光回波信号检测能力,对激光雷达的光学发射接收模块进行了优化设计。
通过ZAMAX完成了非球面面形参数设计。
优化后剩余球差仅为1.0m,光斑能量集中度提高,均方根半径达到0.23um.光班有效直径小干0.38mm实验分别对优化前后的光斑半径进行了测试对比,结果显示;优化后光斑直径约为优化前的1/10。
在此基础上完成目标三维点云获取,优化前后特征点的位置解算精度平均误差分别为9.7%和2.9%。
验证了在不改变光学系统尺寸的前提下,通过优化设计光学系统参数可以提高系统信噪比。
关键词:激光雷达;车载导航;光学设计;光斑半径;引言智能导航系统"是未来汽车智能化的重要目标,现有超声雷达等避障设备随着路况环境和应用环境的升级很难再满足要求,尤其是不能进行有效目标识别的前提下,往往无法实现智能导航的目标。
激光雷达技术是国际公认的智能驾驶技术基础2,为了获取更好的测试效果,激光雷达的光学系统成为了一项研究热点3。
激光雷达回波信号的接收有牛顿式望远镜4、格里格拉式望远镜卡塞格林式望远镜6以及伽利略式望远镜"。
牛顿式结构最简单,且成本低,但由于其探测器与结构不同轴,对系统稳定性要求高;格里格拉式望远镜的成像效果较好,但由于需要采用非球面加工,工艺复杂成本高;卡塞格林式望远镜采用2次成像的方式扩大了系统的接收视场范围,有利于提升成像质量,但反射式结构设计会使部分回波光强受到损失;伽利略式望远镜结构简单、体积小,虽然成像质量不高,但在本系统应用中主要以获取目标位置点能量强度为主,故可以忽略成像误差造成的不足,并且采用准直聚焦的方式捕获光斑能量成为主要目标。
非扫描测风激光雷达光学系统设计
彭章贤;刘博;岳永坚
【期刊名称】《强激光与粒子束》
【年(卷),期】2015(27)9
【摘要】光学系统是测风激光雷达小型化的关键,光学设计的质量直接影响系统的整机性能.提出了一种全光纤多路收发非扫描多普勒测风激光雷达系统方案,对其工作原理作了简要介绍;在对激光雷达系统信噪比开展理论分析的基础上,提出了光学天线的视场、孔径、焦距等设计参数,并利用光学设计软件对光学天线进行了设计和仿真实验.该系统工作波长为1064 nm,设计结果表明,光学天线相对口径为
1:4.28,全视场角为20°×22.5°,总长为277mm,后截距127.28 mm,有效焦距300 mm,口径70 mm,各视场光纤耦合效率均在65%以上,满足设计指标要求.
【总页数】7页(P62-68)
【作者】彭章贤;刘博;岳永坚
【作者单位】中国科学院光电技术研究所,成都610209;中国科学院大学,北京100049;中国科学院光电技术研究所,成都610209;中国科学院光电技术研究所,成都610209
【正文语种】中文
【中图分类】O436
【相关文献】
1.基于线性频率调制的非扫描激光雷达距离成像技术的研究 [J], 姚雪萍;杨进华
2.基于压缩感知的非扫描激光雷达成像技术研究 [J], 谢殿广;刘景鹏
3.Windcube激光雷达与测风塔测风结果对比 [J], 王乔乔;张秀芝;王尚昆
4.扫描式测风激光雷达的风场反演 [J], 李丽;王灿召;谢亚峰;董光焰
5.3D非扫描成像激光雷达距离精度的Cramer-Rao下限 [J], 赵文;韩绍坤
因版权原因,仅展示原文概要,查看原文内容请购买。
面向车载导航激光雷达的光学系统优化设计摘要:随着遥感技术的不断发展,人们对其的要求越来越高,希望能够在不增加成本的前提下,不破坏原有的光学系统,只需要简单的设计便可以达到想要的结果。
因此,本文提出了一种基于车载导航的激光雷达的设计方案,该方案的设计是通过对射频收发系统的结构进行分析,并根据其优缺点,建立出一套合理的系统的数学模型,计算出系统的反射系数,并以此来确定出系统的参数,从而实现车载导航的功能。
关键词:面向车载导航;激光雷达;优化设计引言:根据车载激光雷达的组成,确定出系统的总体设计方案。
接着,使用Matlab软件,建立车载激光雷达的数学模型,并利用MATLAB编程实现仿真,验证算法的可行性。
最后,在满足设计要求的条件下,提出优化策略使整个系统达到最优。
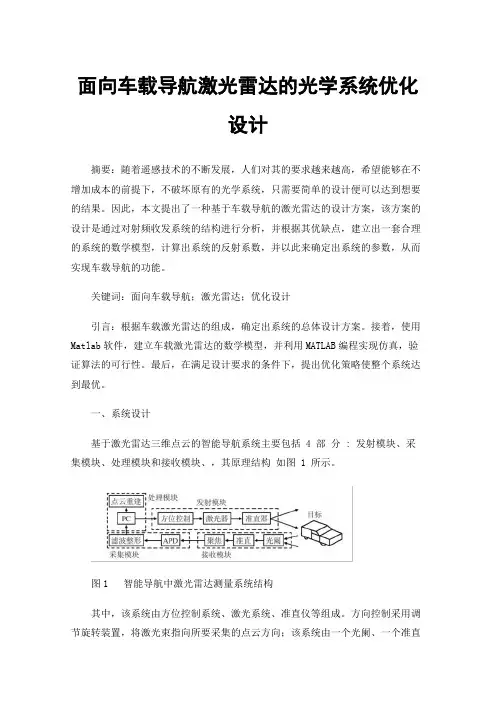
一、系统设计基于激光雷达三维点云的智能导航系统主要包括 4 部分 : 发射模块、采集模块、处理模块和接收模块、,其原理结构如图 1 所示。
图1 智能导航中激光雷达测量系统结构其中,该系统由方位控制系统、激光系统、准直仪等组成。
方向控制采用调节旋转装置,将激光束指向所要采集的点云方向;该系统由一个光阑、一个准直和一个焦点部件组成,该光阑可以控制视野的大小,并将反射的光线集中到一个光敏器件(APD)上。
其中,其中包括了滤波器和 APD探测器,实现了对回波的光学信息的提取和对回波的滤波和去噪声。
其中,在处理部分,通过 PC对数据进行分析和重构,得到对应的点云数据。
二、工作机理2.1三角法测距由于研究目标是在车辆3D导航中,基于对测量距离和实时反应的需求,采用了三角形测距方法。
将激光器光轴与传感器 APD光轴之间的距离为 L,将系统的焦距为 f,那么,在目标运动后,图像面上的任何点x,两个测量值之间的差为Δx,则有函数zx =fL,Δx = Lf(z0-1 -z-1 ) ( 1)式中 z 为目标到测试系统的距离,z0 为初始距离。
则 z可以写成z =可见,通过三角法计算出所有测试点的距离后,就能构成待测区域的点云集合,实现目标识别,为避障及路径规划提供数据支撑。