车牌倾斜校正研究综述
- 格式:doc
- 大小:35.00 KB
- 文档页数:10
2009年第23卷第5期测试技术学报V o l.23 N o.5 2009 (总第77期)JOURNAL OF TEST AND M EASURE M ENT TECHNOLOG Y(Sum N o.77)文章编号:167127449(2009)0520452205R adon变换在倾斜车牌图像校正中的应用Ξ贡丽霞,白艳萍(中北大学理学院,山西太原030051)摘 要: 倾斜车牌图像的校正是车牌识别中的重要环节之一.根据R adon变换思想,对三种倾斜方式提出了相应的校正方法.用数学形态学的方法对车牌图像进行边缘检测;利用R adon变换检测车牌倾斜角度,对水平方向进行旋转无损校正,对垂直方向进行双线性插值错位偏移校正.实验结果表明该方法是快速有效的.关键词: R adon变换;倾斜校正;边缘检测;双线性插值中图分类号: T P391 文献标识码:AApplication of Radon Tran sformation to L icen sePlate Slan t CorrectionGON G L ix ia,BA I Yanp ing(Schoo l of Science,N o rth U niversity of Ch ina,T aiyuan030051,Ch ina)Abstract: I m age skew co rrecti on is one of the key techno logies in1icen se p late recogn iti on.A cco rding to the R adon tran sfo r m ati on,the co rresponding co rrecti on m ethods are p resen ted fo r th ree inclined w ays.F irst,the edge of the p late i m age is detected by the related operati on of m athem atical m o rp ho logy.N ex t,lo ssless ro tati on co rrecti on is p erfo r m ed fo r the tilt p late along the ho rizon tal line, and b ilinear in terpo lati on offset co rrecti on is m ade along the vertical line.Experi m en tal resu lts show that the p ropo sed m ethod is valid.Key words:R adon tran sfo r m ati on;tilt co rrecti on;edge detecti on;b ilinear in terpo lati on0 引 言车牌自动识别过程包括图像获取、车牌定位、车牌校正、字符分割及字符识别,其中图像的获取一般是通过固定架设在通道上方及两旁的CCD摄像机拍摄得到,由于受到采集镜头与车牌之间的距离、汽车驾驶速度以及司机所挂车牌位置等的影响,牌照总有一定的倾斜度.这就给字符分割带来不利影响,造成误分割和车牌识别率的下降.因此,需要在字符分割之前进行车牌的倾斜校正.目前研究倾斜校正问题一般采用的方法有:①用Hough变换法检测车牌的边框直线,进而确定车牌Ξ收稿日期:2009202221 基金项目:2009年国家自然科学基金资助项目(60876077);2009年省自然科学基金资助项目(200901101823) 作者简介:贡丽霞(19832),女,硕士生,主要从事计算机科学中的数学问题研究通信作者:白艳萍(19622),女,教授,主要从事应用数学研究.的倾斜角,它对边框明显的车牌效果很好,校正精度较高,但当牌照边框有磨损变形或牌照本身无边框时,效果较差;②用主成份分析法对二值化后的车牌图像直接进行数值计算,用特征向量的方法进行校正,但要求实测图像的二值化图像非常精确;③投影法对投影图形状进行分析,但是由于需要计算每个倾斜角度的投影形状,因此其计算量非常大.本文利用R adon 变换思想提出倾斜车牌图像的校正方法,在水平方向进行旋转无损校正,垂直方向进行双线性插值错位偏移校正.大量实验表明,该方法简单实用,对光照不敏感,抗干扰性强.1 数学形态学边缘检测由于车牌里面内容丰富,有汉字、英文字母和阿拉伯数字,为了避免被车牌内容干扰,所以对车牌进行R adon 变换,检测水平边和垂直边之前,需要对车牌图像进行预处理.数学形态学是一种非线性滤波方法,可以用于抑制噪声、特征提取、边缘检测、图像分割等图像处理问题.其基本的形态运算是腐蚀和膨胀,并通过腐蚀与膨胀还可以构成开运算和闭运算.许多常用的边缘检测算子通过计算图像中局部小区域的差分来工作,它们对噪声较敏感且常在检测边缘的同时加强噪声.而形态边缘检测器主要用到形态梯度,虽对噪声也较敏感但不会加强或放大噪声.设用A 表示图像,B 表示结构元素(A 和B 均为集合),最基本的形态学梯度定义如下Grad 1=(A B )-(A (B ).(1)较尖锐的边界可用如下等价定义的形态梯度获得Grad 2=(A B )-A .(2)将原图像灰度化图1(a ),二值化后可得二值图像图1(b ),然后用形态学梯度式(2)检测二值图像的边缘,由腐蚀运算对二值图像中灰度为1的像素点进行,先对原图像取反,见图1(c ),再运用3×3结构的腐蚀运算消除边缘,与腐蚀前的图像相减得边缘图像,见图1(d ).图1 数学形态学边缘检测结果F ig .1 T he dege detecti on results of m athem atical mo rpho logy2 倾斜车牌校正算法2.1 车牌倾斜方式一般情况下,可将倾斜的车牌图像近似看成一个平行四边形,有三种倾斜方式:水平倾斜(图2(a ))、垂直倾斜(图2(b ))和混合倾斜(图2(c )).水平倾斜时字符本身没有发生错切,车牌区域的主轴x ′与图像的水平轴x 之间有一个倾斜角度Α,只需求出Α,把整个图像旋转-Α即可.垂直倾斜图像的倾斜实际上是车牌区域同一行间像素的错位偏移.只要检测到垂直倾斜角度Β进行错位偏移校正即可.混合倾斜图像,既存在水平倾斜又存在垂直倾斜,在实际校正中,先进行水平倾斜校正,在此基础上再进行垂直倾斜校正.2.2 R adon 变换R adon 变换可以定义在任意维变量空间域,对于图像而言,考虑二维欧式空间的变换形式R (Η,Θ)=κD f (x ,y )∆(Θ-x co s Η-y sin Η)d x d y ,(3)式中:D 为整个图像平面;f (x ,y )为图像上某一点(x ,y )的像素点灰度值;特征函数∆为狄拉克函数;x ,y )平面内直线到原点的距离;Η为原点到直线的垂线与x 轴的夹角.特征函数∆使积分沿着直354(总第77期)R adon 变换在倾斜车牌图像校正中的应用(贡丽霞等)线Θ=x co s Η+y sin Η进行.图3显示了直线Θ=x co s Η+y sin Η的R adon 变换,由此可看出,当Θ和Η固定时,直线Θ=x co s Η+y sin Η是唯一确定的;反过来,x 2y 平面的任意直线都对应于Θ2Η平面的一个点,故R adon 变换将x 2y 平面的一条直线映射为Θ2Η平面一个点.图2 车牌的三种倾斜方式F ig .2 T he th ree inclined w ays of V eh icle L icense Plate图3 R adon 变换示意图F ig .3 Sketch m ap of R adon transfo r m ation 图4 R adon 变换F ig .4 R adon transfo r m ati on2.3 倾斜角度的提取及校正2.3.1 水平倾斜角度检测及校正Step 1 通过数学形态学方法,将原始图像转化为二值边缘图像;Step 2 计算边缘图像的R adon 变换,如图4所示;Step 3 计算出R adon 变换矩阵中的峰值.R adon 变换后,原图像中的直线段对应R adon 空间中的点,且线段越长,对应的点亮度越大,所以应在R adon 空间中找那些峰值点,为测量得准确,把所有峰值点按降序排列,取前几个峰值,计算每列之和,存放在矩阵R 中,并执行如下命令图5 水平校正后图像F ig .5 P late after ho rizontal tilt co rrecti onfo r i =2:length (R ) E (i )=a 3R (i )+(1-a )3E (i -1);end得到新的矩阵E ,求E (i )的最大值,Α= 90°-i 为车牌的水平旋转角度.Step 4 对水平方向进行旋转无损校正,将图像旋转±Α.顺时针旋转时Α<0,逆时针时Α>0.图4为R adon 变换系数图,颜色越亮的表示系数越大,可知,R adon 变换系数最大值大约出现在角度为95°处,则Α=90°-95°=-5°,将图像顺时针旋转5°即可,如图5所示.2.3.2 垂直倾斜角度检测及校正垂直倾斜是左右变形,而左右变形是Y 方向的错切变形,所以垂直倾斜可以看成图像沿X 轴的错切454测试技术学报2009年第5期变换,则垂直倾斜校正就是沿X 轴方向的逆错切变换,垂直倾斜校正矩阵形式为[X ′1 Y ′1 1]=[X 1 Y 1 1]100tan Β10001,(4)式中:X 1和Y 1分别为水平倾斜校正后图像的x 和y 坐标矩阵;X ′1和Y ′1分别为最终校正图像的x 和y 坐标矩阵;Β为垂直倾斜角度.具体算法如下:Step 1 求出E 中Α到E 的长度(-1)的所有极小值的右边界R b ,再求2到Α的所有极小值的左边界L b ,且E (i )小于等于E 的平均值.算法为:fo r j =alp ha :length (E )-1 if (E (j )<=m )&&(E (j )<E (j -1))&&(E (j )<E (j -1)) R b =j ; endendStep 2 过滤(L b ,R b )之间的值,即E (L b :R b )=m in (E (L b ),E (R b )).Step 3 在0~Π之间找出唯一的E (i ),即每一个以1°为步长的小邻域的极大值,且E (i )>m .i 就是垂直倾斜角度,记作Β.当沿X 轴正方向逆错切时,tan Β<0;当沿X 轴负方向逆错切变换时,tan Β>0.图6 垂直校正后图像F ig .6 P late after vertical tilt co rrecti onStep 4 将上述垂直倾斜角度Β代入式(4)进行坐标值校正,校正过程采用双线性插值方法完成.双线性插值的输出像素值是其在输入图像中2×2邻域采样点的平均值.此插值方法用分段的双线性来拟和已知数据,插值点的值取决于4个最邻近点的组合;并且它占用的内存比二次立方插值少,速度也较快.车牌图像经过水平校正后,已经基本保持水平,根据上述算法,得到垂直倾斜角度为9°,则垂直校正后图像如图6所示.3 实验结果分析以下是算法的仿真实验结果,图7(a ),图8(a ),图9(a )都已经定位,并进行二值化处理,背景为黑色,字符为白色;提取边缘图像.把本算法和投影法在时间及检测角度方面进行比较,本文算法运行时间少,精确度高,在计算机上的平均运行时间为0.3485s .图7 水平倾斜图像校正结果F ig .7 R esults of ho rizontal tilt i m age co rrecti on图8 垂直倾斜图像校正结果F ig .8 R esults of vertical tilt i m age co rrecti on554(总第77期)R adon 变换在倾斜车牌图像校正中的应用(贡丽霞等)654测试技术学报2009年第5期图9 混合倾斜图像校正结果F ig.9 R esults of vertical tilt i m age co rrecti on4 结 论本文实现了一种利用R adon变换对车牌进行倾斜校正的方法,为了得到更好的效果,先采用了数学形态学方法对车牌图像进行边缘检测,再利用R adon变换检测车牌的水平和垂直倾斜角度,最后在水平方向进行旋转无损校正,垂直方向进行双线性插值错位偏移校正.实验证明,该方法简单易行,在车牌图像有污迹、光照不均以及车牌边框不明显时仍能得到较好的倾斜校正效果.参考文献:[1] 李文举,梁德群,崔连延,等.一种新的车牌倾斜校正方法[J].信息与控制,2004,33(2):2312235.L i W enju,L iang D equn,Cui L ianyan,et al.A novel app roach fo r veh icle license p late tilt co rrecti on[J].Info r m ati on and Contro l,2004,33(2):2312235.(in Ch inese)[2] 胡小峰,赵辉.V isual C++ M A TLAB图像处理与识别实用案例精选[M].北京:人民邮电出版社,2004:1142115.[3] 王枚,王国宏.基于字符投影最小距离的车牌校正方法[J].计算机工程,2008,34(6):2162218.W ang M ei,W ang Guohong.M ethod of veh icle license p late co rrecti on based on characters p ro jecti on m ini m um distance[J].Computer Engineering,2008,34(6):2162218.(in Ch inese)[4] 潘梅森,肖政宏.一种新的车牌号码倾斜校正方法[J].光电子激光,2008,19(8):111621120.Pan M eisen,X iao Zhenghong.A n algo rithm fo r veh icle license p late tilt co rrecti on base on singular value decompo siti on[J].Journal of Op toelectronics L aser,2008,19(8):111621120.(in Ch inese)[5] 孙东卫,朱程辉.基于R adon变换的倾斜车牌图像角度检测与校正[J].微计算机应用,2008,29(2):18221.Sun Dongw ei,Zhu Chenghui.Skew angle detecti on of the veh icle license p late i m age and co rrect based on radon transfo r m ati on[J].M icrocomputer A pp licati ons,2008,29(2):18221.(in Ch inese)。
文献综述1前言近几年来,随着汽车的数量猛增,智能型交通体系(ITS——Intel ligent Tran sporta tion S ystem)便成为未来交通监管系统的主要发展趋势,所谓智能交通系统是在较完善的基础设施(包括道路、港口、机场和通信)之上将先进的信息技术、通信技术、控制技术、传感器、计算机技术和系统综合技术有效的集成,并应用于地面运输系统,从而建立起在大范围内发挥作用的,实时、准确、高效的运输系统[1~2]。
行驶车辆的车牌实时识别尤其是智能运输系统研究的重要组成部分。
车牌识别系统是对公路上配置的摄像头拍摄的照片进行数字图像处理与分析,综合应用大量的图像处理最新成果和数学形态学方法对汽车图像进行平滑、二值化、模糊处理、边缘检测、图像分割、开运算、比运算、区域标识等,利用多种手段以提取车牌区域,进而达到对汽车牌照的精确定位并最终完成对汽车牌照的识别。
车牌识别系统的用途很多,如高速公路电子收费站、公路流量控制、公路稽查、失窃车辆查询、监测黑牌机动车、监控违章车辆的电子警察等公路监管场合,以及停车场车辆管理、出入控制等需要车牌认证的场合都要应用车牌识别系统,尤其在高速公路收费系统中,实现不停车收费技术可提高公路系统的运行效率,由此可见车牌识别系统具有不可替代的作用,因此对车牌识别技术的研究和应用系统的开发具有重要的现实意义。
2 车牌识别技术研究现状车牌识别系统要综合应用多种手段提取车牌区域,对汽车牌照的精确定位并最终完成对汽车牌照的识别。
因此车牌识别系统要应对多种复杂环境,如车流量高峰期、照射反光、车牌污染等。
利用模拟人脑智能A NN,在识别车牌时能进行联想记忆与推理,能够较好地解决字符残缺不完整而无法识别的问题。
车牌识别系统方法的研究和实现工程领域:软件工程研究生指导老师随着社会经济的不断发展和人们生活水平的普遍提高,交通变得越来越拥挤,智能交通系统已经成为交通管理的主要方向,而车牌识别系统是智能交通管理系统的核心内容,研究车牌自动识别技术具有重要的实用价值。
论文主要完成了车牌识别系统的方法研究和设计工作。
车牌识别过程主要包括:车牌预处理、车牌倾斜校正、数字字符分割和字符识别。
车牌预处理方法,首先通过中值滤波对图像进行平滑处理,再用寻求最佳阈值的方法对图像进行二值化的处理。
车牌倾斜校正方法,首先利用Hough 变换提取车牌边框的直线,并对结果进行统计平均求出车牌的倾斜角度,再采用仿射变换得到校正后的图像。
数字字符分割方法,首先利用先验知识去除边框和去除孤立单元面积,然后利用投影分割法对车牌图像进行分割,从而得到数字字符的精确位置。
字符识别方法,采用基于细化图像的Hausdorff距离模板匹配识别方法,识别之前首先进行图像的归一化和细化预处理,然后建立细化图像的标准模板库,用Hausdorff距离匹配,将车牌字符识别出来。
试验结果表明,论文所提出的多种预处理与识别技术有机结合的车牌识别方法能较准确地识别车牌,整个系统的识别能力和运行性能良好。
关键词:图像去噪,二值化,字符分割,模板匹配,字符识别License Plate Recognition Research andImplementationField: Software EngineeringGraduate Student:Han Rui Advisors:Ruan Shuhua Tang SanpingWith the social economic development and people's standard of living are general improving,traffic has become more and more congestion.Intelligent Transportation System(ITS) is the main way to solve the traffic congestion and blocking,LPR is an important field in the ITS,and it has great application value.On the basis of other people's research,this paper has researched and designed LPR, This paper has mainly the following four parts: image preprocessing,tilt correction, character segmentation and character recognition. Image preprocessing described the pretreatment work of the image, including smooth the image by making use of the template of median filter, and binarize the image by using the method of seeking the best threshold value. Image tilt correction uses Hough transform to extract license plate line, and the results are statistical average, and then calculate the tilt angle. Finally, the image can be corrected by affine transform.character segmentation gets rid of the plate lines and sound areas through calculating the area,and then uses traditional projection to find the exact location of the characters.character recognition uses template matching to identify which is according to Hamming distance.The experiments show that the method is effective and feasible,it can lacate the licence plate and recognize characters.Keywords:Image Denoising,Binarization,Character Segmentation,Template Matching, Character Recognition目录1绪论 (4)1.1课题背景及意义 (4)1.2车牌识别技术的国内外发展现状 (5)1.3车牌自动识别技术的使用范围 (5)1.4我国车牌识别技术的特殊性 (6)1.5车牌识别技术组成.............................................. 错误!未定义书签。
FPGA实现车牌的倾斜校正【摘要】作为车牌识别系统的关键环节,车牌倾斜直接导致车牌识别准确率降低。
本文主要基于FPGA实现车牌倾斜校正算法,完成如下功能:采用Hough 变换计算倾斜角度,采用CO RDIC(坐标旋转数字计算)算法计算三角函数值;采用双线性插值实现重采样。
【关键词】倾斜校正;FPGA;Hough变换;CO RDIC引言随着我国科学和技术的日益发展,世界范围内汽车数量的增长,城市智能化交通系统(ITS,Intelligent Traffic System)[1]受到人们越来越多的关注并且成为了一个热门的研究领域。
车牌识别(LPR,License Plate Recognition)作为重要技术已经成为系统关键部分的组成。
采集到的车牌图像在一定程度上存在着角度的倾斜,若倾斜角度偏大,则会干扰到了字符识别的准确性,对字符进行分割和识别等工作带来相当大的困扰。
所以说车牌倾斜校正在车牌识别系统中起到了重中之重的地位。
基于FPGA在硬件层面对车牌图像进行倾斜校正,根据倾斜校正算法的特点要求的是实时性和并行性,因此FPGA能很好的达到系统要求,无论是在速度、稳健性、存储容量、复杂环境等方面都可以有可观的改善。
并且基于FPGA的车牌图像倾斜校正系统可以广泛的应用在车牌图像处理和识别系统当中。
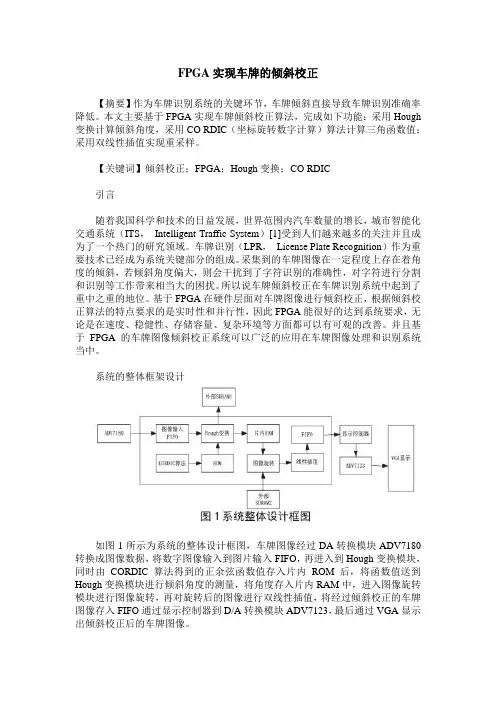
系统的整体框架设计如图1所示为系统的整体设计框图,车牌图像经过DA转换模块ADV7180转换成图像数据,将数字图像输入到图片输入FIFO,再进入到Hough变换模块,同时由CORDIC算法得到的正余弦函数值存入片内ROM后,将函数值送到Hough变换模块进行倾斜角度的测量,将角度存入片内RAM中,进入图像旋转模块进行图像旋转,再对旋转后的图像进行双线性插值,将经过倾斜校正的车牌图像存入FIFO通过显示控制器到D/A转换模块ADV7123,最后通过VGA显示出倾斜校正后的车牌图像。
车牌倾斜校正的软件实现对于车牌倾斜校正算法,要确定车牌的倾斜角,之后对其进行旋转,采用Hough变换测得直线,从而得到倾斜角,在Hough变换的过程中通过CORDIC 算法来实现正余弦三角函数值的确定,通过基于CORDIC算法的Hough变换实现得到倾斜角度,最后对图像进行相应的旋转和插值,最终达到倾斜校正的目的。
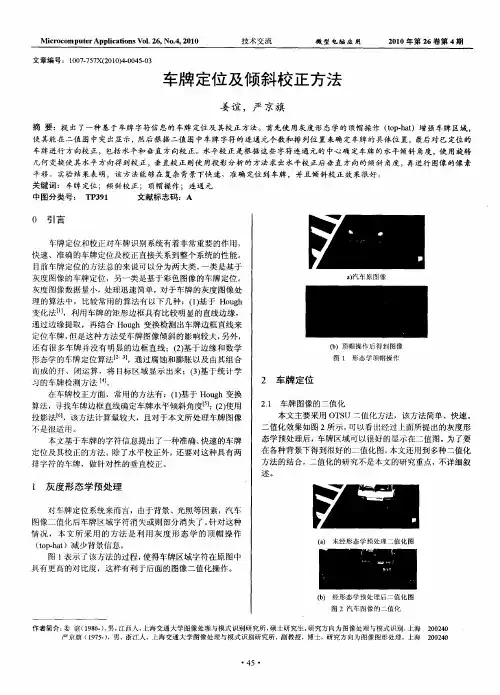
第 29卷第 2期 2008年 2月微 计 算 机 应 用M ICROC OM P U TER APPL IC A T I ON SVol 129 No 12Feb 12008基于 Radon 变换的倾斜车牌图像角度检测与校正3孙东卫 朱程辉(1新疆轻工职业技术学院 乌鲁木齐 8300212合肥工业大学电气与自动化工程学院合肥 230009)摘要 :倾斜车牌图像的校正对于后续车牌图像的分割与识别具有很大的影响 。
本文提出一种基于 Radon 变换来估计倾斜角 度的方法 ,并对之实行分步校正 ,最后应用数学形态学的方法对图像进行平滑处理 。
关键词 :垂直投影 角度检测 倾斜校正 形态学Skew Angle D etection of the Veh icle L icen se P la te Image andCorrect Ba sed on Radon Tran sforma tion 3SUN Dongwei 1, ZHU Chenghu i 2(1 Xinjiang L ight Indu s trial of Professional Techno l ogy,W ul um u qi830021, China, 2 School ofElectrical and Autom ation Engineering, Hefei University of Techno l ogy, Hefei, 230009, China )Abstract: Correction of the skew vehicle license p late is very substantial to the license p late i m ages segm entation and recognition 1 I n this paper, we p resent a method based on Radon transfo rmation, which can estim ate the skew angle by seeking the fram e of the license p late, and then we also p ropose a method to rectify the traffic p late with tw o step s 1Eventually, the mathem atical mo rpho logic p roce 2 d u res are used to smooth the image 1Keywords:Vertical p rojection, Angle detection, S kew correction, Morphology车牌自动识别系统一般由车牌图像预处理 、车牌定位分割 、字符分割 、车牌识别等几部分组成 ,其中车牌字符定位分割的效果是影响车牌准确识别的关键 。
车牌识别中的二值化及快速倾斜校正算法史燕, 吕永战, 张帆(中国空空导弹研究院河南洛阳 471009摘要:根据车牌几何形状和纹理的特点, 提出了基于图像的特征线确定二值化阈值的方法。
为了解决车牌图像倾斜对字符分割与识别带来的不良影响, 对一种基于字符间投影距离的倾斜校正方法做了研究。
在该方法中, 根据倾斜车牌与非倾斜车牌字符的投影距离大小比较来确定车牌图像的倾斜角度, 再用基于双线性插值的旋转方法进行矫正。
针对该方法的不足之处, 提出了该算法的改进算法。
试验结果表明, 该算法是快速而有效的。
关键词:车牌识别; 特征线; 二值化; 投影间距; 倾斜校正中图分类号:T P391. 4 文献标识码:B 文章编号:1004-373X (2009 05-149-04Binary Conversion and Slant C orrection Algorithm in Preprocessing ofLicense Plate RecognitionSHI Y an, L V Yong zhan, ZH A N G Fan(Chi na A i rborne Missile Academ y, Luoyang , 471009, Chi naAbstract :A cco rding t o plate shape and char tex ture, an algo rit hm applied to license plate binar y conver sion of vehicle image based on feature line is intr oduced. In o rder to resolve the difficulties in character segmentatio n and adver se impact to the final recog nitio n r ate, a new metho d is presented based on char acters vert ical project ion distance. T he metho d first analyses the change o f distance betw een t wo character s which comes fr om the vert ical project ion tow ards lean image and hor izo nt al imag e, the lean ang le o f image is found out, and then, a ho rizo ntal image is gained by the ro tatio n based o n bilinear interpolatio n. Co n -sidering the defects of this method, anoptimum alg or ithm is intr oduced. Ex per imenta l r esults ar e pr ov ided to demonstrate the per for mance of the pro po sed alg or ithm.Keywords :license plate recog nitio n; feature line; binar y conver sion; v ertical projection distance; slant co rr ect ion收稿日期:2008-08-120 引言车牌识别技术(License Plate Recog nition, LPR 是计算机视觉与模式识别技术在智能交通领域应用的重要研究课题, 是实现交通管理智能化的重要环节。
基于线性回归法的车牌倾斜矫正算法作者:李金铎来源:《中国科技博览》2016年第02期[摘要]线性回归是利用数理统计的分析方法,来确定两种或两种以上变量之间的相互依赖的关系。
车牌的边界具有明显的线性关系,线性回归模型经常用最小二乘的方法来拟合,能达到车牌校正的效果。
车牌的图像一般是彩色的,需要将彩色图像转换为灰度图像,同时需要将灰度图像进行滤波处理,滤波步骤采用维纳滤波器。
经过预处理之后的图像,采用边缘检测方法来获得车牌的边缘点,从图像中选取适合进行线性回归的点,进行图像校正。
MATLAB提供了基本数字图像处理的函数,因此选用MATLAB做为本算法的试验工具。
[关键词]车牌线性回归倾斜矫正中图分类号:TP391.41 文献标识码:A 文章编号:1009-914X(2016)02-0302-011 引言随着经济的发展,机动车辆的数量大幅增长,机动车牌的智能识别变成了重要的课题。
并且实际情况中的拍摄条件的差异性和实际情况的不同,获取的图片的车牌会有倾斜的情况。
车牌的倾斜校正成为了车牌智能识别的关键步骤,对车牌字符分割效果起了决定性的作用。
目前对车牌的倾斜校正工作,已经有了一定的研究成果。
比较常用的方法就是Hough变化的方法来获得车牌旋转角度,完成车牌的倾斜校正工作。
因此本文提出了线性回归法来完成车牌的倾斜校正,并用试验来验证算法的可行性。
MATLAB因为其强大的功能在数字图像的处理方面获得了广泛的应用,MATLAB提供了颜色空间转换,图像平移,图像的缩放,图像的旋转等函数,因此本文采用MATLAB作为该算法的实验平台。
2 基于线性回归的算法线性回归是利用数理统计的分析方法,来确定两种或两种以上变量之间的相互依赖的关系,线性回归的应用范围比较广泛。
线性回归模型经常用最小二乘的方法来拟合,如下图所示一些点均匀的分布在该线的周围,采用最小二乘的方法利用准则函数即可估计出该直线的与水平的夹角。
该直线的斜率:根据上面的公式就能计算出直线的斜率从而获得直线的倾斜角,来完成校正工作。

计算机图形学课程设计题目名称:汽车车牌识别系统的设计综述班级:学号:学生姓名:汽车车牌识别系统的设计综述摘要车牌的自动识别是计算机视觉、图像处理与模式识别技术在智能交通领域应用的重要研究课题之一, 是实现交通管理智能化的重要环节, 主要包括车牌识别、字符预处理和特征提取三个关键环节。
车牌识别包括车牌定位、灰度(或彩色)图像二值化、字符切分及字符识别等。
图像预处理包括图像灰度变换、图像增强、图像二值化、梯度锐化、噪声去除、倾斜度调整、车牌边框去除、字符分割、尺寸标准归一化、紧缩重排。
特征提取本文采用逐象素特征提取法来对支付进行识别。
理论上,本系统可以对中国大陆普通汽车车牌的字符进行识别。
关键词:车牌识别,图像预处理,特征提取引言1.1 问题概述随着我国汽车产业的飞速发展,大量在公共场合的汽车需要得到监管,为了更好地进行管理,必须对车辆进行一种确认,而车牌识别就是其中最有效的确认方法,汽车车牌识别VLPR 是Vehicle License Plate Recognition 的简称,他是智能交通系统(Intelligent Transportation Systems,ITS)的一个重要组成部分。
车牌识别技术的运用使得“大输入小输出”成为了可能——输入一幅很大存储量的图像,输出时仅仅是很小存储量的数字,这必然使得其在大量存储和管理数据库相连等方面有无可替代的优越性。
车牌识别技术在高速公路收费站、路口监测(电子警察)、大型停车场等场所具有广阔的发展前景。
1.2 目的和意义车牌识别LPR[1]是智能交通系统(ITS)的一个重要组成部分。
在社会生活,治安管理等方面有很大的作用。
车牌识别技术的运用使得“大输入小输出”成为了可能——输入一幅很大存储量的图像,输出时仅仅是很小存储量的数字,这必然使得其在大量存储和管理数据库相连等方面有无可替代的优越性。
由于光照、气候引起的车牌图像上字符光照不均,车牌本身污损造成的字符笔画不清和字符间粘连,汽车行驶速度较快,使拍摄出的车牌字符产生变形、模糊不清,因此图像需要增强。
Internal Combustion Engine &Parts害,因为一些特别伤害身体的工作,完全可以交给机器人去工作,或者让机器人在其中担当重任。
而且在一些重活需要干的时候,也可以让机器人去干,这样一来,就可以降低工作人员的工作强度,让他们不会那么累。
而且机器人焊接和自动化设备的使用,还可以提高工作的效率,降低人力成本,提高企业的经济收益,使得企业可以良好的发展。
3自动化焊机技术发展的趋势在最近一些年里,自动化技术的使用是越来越广泛,而且自动化焊接技术的发展也是更加的迅猛,在未来,自动化焊接技术的发展趋势有以下几个特点。
3.1工程机械的自动化焊接技术的长久性的发展和使用现在的企业里面,基本上都是在大规模的使用自动化焊接技术,在看到自动化焊接技术给企业带来的好处之后,企业是不会放弃使用的,所以自动化焊接技术会持久的被使用,而且不单单是继续使用,企业想在行业内保持竞争力,或者更上一层楼,就必须得加大对自动化焊接技术的研发的投入。
只有保证自身企业的自动化焊接技术的领先性,才能保证企业的竞争能力。
所以说,在未来的这些年里,工程机械的自动化焊接技术会持续的使用,而且会继续研究发展。
3.2工程机械的自动化焊接设备的持续性应用和发展正是因为自动化技术可以给企业带来巨大的利益,所以企业对自动化焊接设备也是会大规模的应用,甚至是可能把所有能替换的都替换掉,只有这样才能够让企业有更大的效益。
而且在技术发展的同时,设备也会更新换代,所以说工程机械的自动化焊接设备会持续的应用和发展。
4结束语工程机械焊接自动化技术的运用时更加的广泛,也是未来发展的主要方向。
所以企业在今后的发展过程中,需要继续加大对工程机械焊接自动化技术的研发力度,并且要在现实操作中找出其中的不足,并且加以完善,提高我国的焊接自动化水平。
参考文献:[1]郄胜利.焊接自动化技术在工程机械中的应用探讨[J].建筑工程技术与设计,2018(11):1271.[2]曹继民,赫森.探究工程机械焊接自动化技术的应用[J].建材与装饰,2018(16):208.[3]张志,马超芳.自动化焊接设备在工程机械制造中的应用[J].科学技术创新,2018(5):179-180.1绪论车牌的倾斜校正最重要的是求取倾斜角度和校正车牌图像的形变。
车牌倾斜校正研究综述摘要:作为智能交通系统的核心技术之一,基于机器视觉的车牌识别一直受到广泛的关注。
对车牌图像进行倾斜校正是车牌识别的重要步骤,其目的是解决拍摄角度随机性对识别过程的影响。
该文将现有倾斜校正方法划分为直线检测、投影最值、角点检测、主方向分析四类,首先介绍了它们的研究成果,然后剖析了它们在鲁棒性方面存在不足的原因,展望了下一步的研究方向。
关键词:智能交通车牌识别倾斜校正Abstract:License plate recognition based on machine vision,one of the key technologies of intelligent transportation system,has been paid much attention to. Tilt correction for license plate image plays an important role in license plate recognition and its aim is to weaken the influence of capture angle randomness to recognition process. In this paper,tilt correction methods are divided into four types:line detection,projection maximum or minimum,corner detection and principal orientation analysis. After introducing research achievements of these methods,we analyze the causes of shortages related their robustness and look into the development trends of tilt correction.Key words:Intelligent transportation system license plate recognition tilt correction基于机器视觉的车牌识别是智能交通系统的核心技术之一,可广泛应用于高速公路自助缴费、城市交通监控、违章或犯罪监控以及智能停车场管理等方面,它主要包括图像获取、车牌定位、倾斜校正、字符分隔、字符识别五个部分。
由于车牌的悬挂位置、车辆的位置以及摄像机的安装位置存在相对的不确定性,对车牌的拍摄角度具有一定的随机性,导致定位后提取的车牌图像中字符不可避免地存在某种程度的倾斜,不利于下一步的字符分割,进而影响后续的字符识别率,因此需要在车牌定位和字符分割之间进行车牌的倾斜校正。
该文首先分类介绍了现有倾斜校正方法的研究成果,然后剖析了这些研究的不足之处及其原因,展望了倾斜校正的下一步研究方向。
1 直线检测法车牌具有两组平行边框,尤其是上下边框较长,水平边缘呈两条平行的直线,当车牌倾斜时,两平行线与水平方向的夹角即可看作车牌的倾斜角度。
Hough[1-4]和Radom[5-7]变换经常被用来检测车牌区域的两条最长的平行线,从而根据它们与水平方向的夹角实现倾斜校正。
这两条平行线所在的方向使得Hough或Radom变换累加器取得最大值,直接在车牌区域的边缘图像中检测该最大值对应的直线即是Hough、Radom直线检测法的常用形式。
然而,这两种变换计算量大,导致执行时间急剧上升。
芮挺等针对传统Hough直线检测法实时性差的特点,提出一种改进算法。
他们首先通过数学形态学处理和轮廓跟踪去除与校正无关的冗余信息,仅保留边框的轮廓;然后,采用一种Hough变换倾斜角分级检测的策略,将角检测精度到从1?°过度到0.1?°,大幅降低检测次数。
实验证明:改进方法的校正时间约为传统Hough直线检测法的十分之一左右,在23~27?ms之间(AMD Athlon-800 CPU,128?M RAM,VC++6.0)。
同样地,这种改进也适用于Radom直线检测法。
事实上,车牌的边框特征很不稳定,很多情况下边框并不明显,或是残缺不全,因此Hough、Radom直线检测法的鲁棒性较差。
2 投影最值法车牌在倾斜方向上的投影具有特殊的最值现象,通过查找该最值对应的旋转角度即可确定车牌的倾斜角,这种方法叫做投影最值法[8-13]。
吴成东等按一定的角度旋转车牌图像,并得到相应的水平差分投影;然后,利用Fisher判别准则获得最优水平切割。
当切割后的水平差分投影均值最大时,对应的旋转角度即为车牌的倾斜角度。
采用类似的坐标轴投影方法,王枚等通过字符投影的最小距离以及J.B.Jiao等通过有效投影线段的最小数目获得车牌的倾斜角度。
区别于上述向坐标轴投影的方法,陈振学指出:在倾斜方向上投影像素值的累积平方合是最大的,可以将倾斜车牌向各个方向投影,同时计算投影区域的像素值累积平方和,其中最大值对应的方向就是车牌倾斜的方向。
利用230个倾斜车牌进了测试,该方法取得了96.1%的校正准确率。
此外,为了克服传统投影最值法不断变换角度引起计算量显著增大的缺点,吴一全等[9]将旋转后车牌图像的垂直边缘向水平方向投影,然后导出边缘点投影方差最小时旋转角度的闭合表达式,由此直接确定车牌的倾斜角度。
利用50幅图像在MATLAB6.5平台上进行了多种校正方法的比较实验,结果表明:该方法在校正精度和实时性方面具有较大的优势,尤其是执行时间较Hough直线检测法和传统的投影最值法分别低了1和2个数量级,平均校正误差约为0.338?°,平均执行时间约为4.5?ms(P4 2.8?G CPU,512?M)。
而且,他们还进一步利用粒子群优化算法讨论了投影p次方差对校正精度和执行时间的影响,实验结果表明:p=2时运算速度最快,p→∞时校正精度最高[13]。
3 角点检测法车牌区域的角点与其倾斜角度存在着一定联系,通过定量描述这种联系可以确定倾斜角度,这种方法称为角点检测法[14-15]。
张美多等试图通过检测车牌边框的四个角点来实现倾斜校正。
为了降低运算量和分析难度,他们将检测区域限定在车牌四个顶点处的矩形区域内,并设定该区域的长和宽分别为整个车牌区域长度的1/10和宽度的1/4。
然后,利用Harris算法检测出符合要求的角点,并进一步根据内角点的特征进行滤噪,最终获取车牌边框的四个角点。
该方法不仅可以同时实现水平和垂直方向的倾斜校正,还为字符分割提供了较好的依据,然而依赖于清晰的边框特征也是其最大的缺点。
吴一全等提出一种角点惯性主轴的校正方法,避免了这个缺点。
他们利用改进的Harris算法检测车牌字符的角点,然后将这些角点惯性主轴的方向定为车牌的倾斜方向。
角点的惯性主轴是指过这些角点的质心且惯性矩最小的那条直线,而在所有过角点质心的直线中,只有其倾斜角度与车牌倾斜方向一致时,对应的惯性矩才最小,所以角点的惯性主轴方向即是车牌的倾斜方向。
利用50幅图像在MATLAB7.0进行了多种校正方法的对比实验,结果表明:该方法在校正精度、准确率、实时性方面明显好于Hough直线检测法和传统的投影最值法,平均校正误差约为0.335?°,校正准确率达到了92%,平均执行时间为50.8?ms (P4 2.66?G CPU,512?M)。
4 主方向分析法主方向分析法的基本思想是通过分析边缘点的分布在车牌倾斜方向的特征,然后利用诸如主成分分析、Karhunen-Loeve展开式或图像矩等工具来确定满足该特征的主方向,从而实现倾斜校正[16-18]。
黄骥等提出一种基于颜色对特征点主成分分析(PCA)的车牌水平校正方法。
该方法根据车牌背景与字符交界处的颜色具有固定搭配的特点,首先在原始车牌图像中提取颜色对特征点,并将其视为待分析的样本构建样本特征点的2维散布矩阵;然后,通过主成分分析求出其主成分方向,该方向就是车牌的水平倾斜方向。
利用100幅图像进行了测试,校正准确率达到了97%。
吴一全等将平行于倾斜方向且过某边缘点的直线定义为特征直线。
该直线使得所有边缘点到自己的距离(即边缘点到直线的偏差)的均方和最小。
求取车牌特征直线的这种方法是基于最小均方误差准则,因此他们采用Karhunen-Loeve展开式来求解。
利用30幅图像在MATLAB6.5平台上进行了对比实验,结果表明:相比Hough直线检测法和传统的投影最值法,该方法校正精度高,实时性好,平均校正误差约为0.338?°,平均执行时间仅为4.5?ms(P4 2.8?G CPU,512?M)。
潘梅森等利用中心矩定义车牌的主轴方向,并以此作为车牌的倾斜方向。
他们以质心为原点求出使得二阶中心矩最小的旋转角度,该角度在原坐标系中的方向即为车牌的主轴方向。
利用矩的旋转不变性,把图像绕质心再反向旋转相应的角度,即可实现水平倾斜校正。
在MATLAB6.5平台上进行了对比实验,结果表明:与Hough、Radom 直线检测法相比,该方法检测精度高,实时性有所提高,平均执行时间约为430?ms。
5 结语综上所述,现有倾斜校正的方法在校正精度和实时性方面都取得了较大的提高,然而,它们的鲁棒性与实际应用的要求还有较大的差距,严重影响了车牌识别的整体效果。
究其原因主要表现在两个方面。
(1)对车牌的完整性和独立性非常敏感。
事实上,定位过程输出的车牌图像在完整性和独立性方面差别很大,其中少数图像的边框、字符都十分清晰完整,且非车牌噪声区域的比例较小;大多数图像要么边框或字符残缺,要么非车牌噪声区域的比例较大,甚至兼而有之。
因此,对边框或字符的完整性非常敏感的方法很难运用于实践,如Hough、Radom直线检测法等。
其次,一旦噪声较多,必然干扰角点特征和投影特征,导致角点检测法和投影最值法的准确率和校正精度急剧下降;同时,这些噪声也必将改变车牌字符边缘在倾斜方向上的分布特征,进而影响主方向分析法的校正效果。
(2)几乎不能兼顾水平和垂直方向的倾斜校正。
很多情况下,车牌同时存在水平和垂直方向的倾斜,若仅进行水平倾斜校正必将干扰分割和识别效果。
然而,仅有一些投影最值法和角点检测法可以分别进行两个方向的倾斜校正。
由于垂直边框较短,Hough、Radom直线检测法很难有效地工作。
在垂直方向车牌宽度约为长度的1/5,主方向分析法也很难利用边缘点的分布特征获得主方向。
通过以上分析,下一步的研究方向主要集中在降低倾斜校正过程对车牌完整性和独立性的依赖程度,同时兼顾水平和垂直方向的倾斜校正。
参考文献[1] 周开军,陈三宝,徐江陵.复杂背景下的车牌定位和字符分割研究[J].计算机工程,2007,33(4):198-200.[2] J.M.Guo,Y.F.Liu.License Plate Localization and CharacterSegmentation With Feedback Self-Learning and Hybrid Binarization Techniques [J].IEEE Transactions on Vehicular Technology,2008,57(3):1417-1424.[3] 曾丽华,李超,熊璋.基于边缘与颜色信息的车牌精确定位算法[J].北京航空航天大学学报,2007,33(9):1113-1119.[4] 芮挺,沈春林,张金林.车牌识别中倾斜牌照的快速矫正算法[J].计算机工程,2004,30(13):122-124.[5] C.Muhammed,U.Aybars,T.Turhan.Automatic number plate information extraction and recognition for intelligent transportation system [J].The Imaging Science Journal,2007,55(2):102-113.[6] Vladimir Shapiro,Georgi Gluhchev,Dimo Dimov.Towards a multinational car license plate recognition system [J].Machine Vision and Applications,2006,17(3):173-183.[7] X.C.Zhang,X.Y.Liu,H.Jiang.A Hybrid Approach to License Plate Segmentation under Complex Conditions [C]//Proceedings of the Third ICNC,2007:68-73.[8] 陈振学.基于特征显著性的目标识别方法及其应用研究[D].华中科技大学,2007.[9] 吴一全,丁坚.基于边缘点投影方差最小的车牌倾斜校正方法[J].系统仿真学报,2008,20(21):5829-5832.[10] 吴成东,樊玉泉,张云洲,等.基于差分投影与优割字符的车牌字符分割[J].东北大学学报(自然科学版),2008,29(7):920-923.[11] 王枚,王国宏.基于字符投影最小距离的车牌校正方法[J].计算机工程,2008,34(6):216-218.[12] J.B.Jiao,Q.X.Ye,Q.M.Huang.A configurable method for multi-style license plate recognition [J].Pattern Recognition,2009,42(3):358-369.[13] 吴一全,张金矿.基于投影坐标p次方差及粒子群的车牌倾斜检测[J].计算机辅助设计与图形学学报,2010,22(1):114-120.[14] 张美多,郭宝龙.车牌识别系统关键技术研究[J].计算机工程,2007,33(16):186-188.[15] 吴一全,付晓莉.采用角点信息和惯性主轴的车牌倾斜检测与校正方法[J].工程图学学报,2009,30(6):127-131.[16] 潘梅森,郭国强.基于图像矩的车牌号码倾斜校正[J].计算机辅助设计与图形学学报,2007,19(8):1041-1045.[17] 吴一全,丁坚.基于K-L展开式的车牌倾斜校正方法[J].仪器仪表学报,2008,29(8):1690-1694.[18] 黄骥,吴一全.基于颜色对特征点主成分分析的车牌校正方法[J].中国图象图形学报,2008,13(4):642-646.。