车牌照字符倾斜校正方法的研究
- 格式:pdf
- 大小:270.46 KB
- 文档页数:2
车牌识别中的倾斜车牌校正算法
车牌识别是现代交通管理中不可或缺的技术之一。
然而,在实际应用过程中,会遇到一些车牌倾斜的情况,导致车牌识别率下降。
因此,研究车牌倾斜校正算法对车牌识别具有重要意义。
车牌识别中的倾斜车牌校正算法是针对车牌图像中出现的倾斜问题进行修正的算法。
它是通过对车牌图像进行预处理,将车牌图像进行倾斜校正,使得车牌上的字符垂直排列,以便于后续的字符识别。
在倾斜校正的过程中,常见的算法有基于角度旋转的算法、基于投影的算法、基于边缘的算法等等。
其中,基于角度旋转的算法是较为常见的一种方法。
它通过计算车牌的倾斜角度,然后进行图像的旋转,使得车牌上的字符垂直排列。
而基于投影的算法则是利用车牌上的字符进行投影,通过寻找字符的最小外接矩形,进而对图像进行校正。
基于边缘的算法则是利用车牌的边缘信息,进行边缘检测和霍夫变换,来计算车牌的倾斜角度,从而实现倾斜校正。
总的来说,车牌识别中的倾斜车牌校正算法是车牌识别技术中重要的一环。
通过对车牌图像进行倾斜校正,能够有效提高车牌识别的准确率和稳定性。
几种车牌图像倾斜角度矫正算法在车牌识别领域中,图像的倾斜会对识别效果造成一定影响,因此对车牌图像进行倾斜矫正至关重要。
下面将介绍几种常见的车牌图像倾斜角度矫正算法。
1. 直线检测法直线检测法是一种常见的图像倾斜矫正方法,其基本思路是通过Hough变换检测车牌上的直线,然后根据检测到的直线的斜率来计算车牌的倾斜角度,最后对车牌进行旋转矫正。
使用直线检测法进行倾斜角度矫正的优点是算法简单易懂,适用于各种类型的车牌图像。
但是,由于车牌图像中存在干扰线条等因素,因此直线检测的准确性受到限制。
同时,该方法也存在计算量较大的问题。
2. 边缘检测法边缘检测法是一种常见的图像处理方法,在车牌图像倾斜矫正中也有广泛的应用。
该方法的基本思路是,通过边缘检测算法检测车牌图像的边缘,进而计算出车牌的倾斜角度。
最后对车牌进行旋转变换矫正。
与直线检测法相比,边缘检测法计算量较小,因此运行速度较快。
但是,由于车牌图像中存在噪点等因素,因此该方法的准确性也存在一定的局限。
3. 预处理法预处理法是一种非常有效的车牌图像倾斜矫正方法。
该方法的基本思路是,通过图像预处理算法对车牌图像进行处理,得到车牌上的字符或特征信息,进而计算出车牌的倾斜角度。
最后对车牌进行旋转矫正。
相比于直线检测法和边缘检测法,预处理法更加准确有效。
但是,该方法需要对车牌图像进行预处理,因此算法复杂度较高。
4. 模板匹配法模板匹配法是一种基于模板匹配的车牌图像倾斜矫正方法。
该方法的基本思路是,利用车牌模板进行匹配,找出车牌上的特征区域,进而计算出车牌的倾斜角度。
最后对车牌进行旋转矫正。
由于车牌模板具有良好的特征性,因此该方法对车牌图像的倾斜角度矫正具有很好的效果。
但是,由于模板匹配过程中需要对车牌模板进行匹配,因此算法复杂度较高。
同时,该方法也需要预先准备车牌模板,对通用性存在一定的限制。
结论以上介绍了几种常见的车牌图像倾斜角度矫正方法,每种算法都各有优缺点,应根据实际情况选择合适的算法。

车牌矫正是车牌定位和字符分割间的一个重要处理过程。
经过车牌定位后所获取的车牌图像不可避免地存在某种程度的倾斜。
这种倾斜不仅会给下一步字符分割带来困难,最终也将对车牌识别的正确率造成直接地影响。
因此要找到一种方法能够检测车牌图像是否水平以及它倾斜的精确角度。
车辆牌照都有上下边框,因此通过检测车牌边框直线的倾斜角度以获得车牌的倾斜角度是一种可行的方法。
变换在数字图像处理技术中是一种检测直线以Hough 及其他几何形状的有效算法,变换检测几何形状的过Hough 程实际上是一个参数猜想过程,它先把直角坐标系中的目标点映射到一个参数坐标系,即先把直角坐标系平面上几何形状上的所有点积累到极坐标系平面的同一点集中去,然后通过寻找极坐标系中点集的峰值来寻找几何特征。
由于这种点集是通过积累统计得到的,因此它具有较强的鲁棒性。
文献中提出中倾斜矫正的方法,文献中提出[4,5]OCR [6]利用车牌边缘特征进行变换矫正车牌倾斜的方法。
但Hough 变换的计算量很大,如果要获得足够精度的倾斜角Hough 度,采用此方法耗时较长,不能适应车辆牌照自动识别的实时要求。
因此变换进行车牌矫正的瓶颈在于速度。
在Hough 车牌矫正的过程中真正有用的信息只有边框,车牌其它部分都是无效的冗余信息,只会增加运算量并可能对倾斜角度的检测带来不利影响。
为此本文提出采用轮廓跟踪和变Hough 换分级检测两种方法共同来提高车牌矫正的快速性。
车牌边框的轮廓提取1 车牌矫正是在完成车牌定位和车牌图像的二值化后进行的。
为了加快矫正速度,最大程度地减少运算时的冗余数据,本文提出采用轮廓跟踪以获取车牌图像的外围轮廓特征。
要获得车牌完整的轮廓要求车牌边框的外围应当是封闭的,但由于拍摄条件和环境的影响,车牌二值图中边框部分可能出现间断,因此首先要对车牌图像进行处理。
数学形态学处理1.1 数学形态学是由一组形态学的代数运算子组成,其中最基本的是腐蚀算子和膨胀算子,运用这些算子及其组合可以对图像结构和形状进行分析和处理。
车牌倾斜校正的方法
车牌要是倾斜了,可有点小麻烦呢。
咱得想办法把它校正过来呀。
有一种简单的办法是利用图像编辑软件。
如果是那种不是特别严重的倾斜,像在电脑上用Photoshop。
你打开有车牌图像的文件后,在菜单里找那个“自由变换”的功能,通常是快捷键Ctrl+T(Windows系统哦)。
这时候图片四周就会出现小方块,你就可以用鼠标拖动这些小方块来调整车牌的角度啦。
就像摆弄小玩具一样,把车牌摆到正正的位置。
不过这个得有点耐心,慢慢调整,可别一下子调过头咯。
还有呀,如果是想通过编程来校正车牌倾斜,那对于懂代码的小伙伴来说也不难。
比如说用Python语言和OpenCV库。
先把车牌图像读进去,然后通过一些算法来检测车牌的边缘。
检测到边缘之后呢,就可以根据边缘的角度来计算出车牌倾斜的角度啦。
再用旋转函数把车牌旋转到正确的角度。
这就像是给车牌做了一场精确的手术,让它“站”得笔直。
不过这对编程小白来说可能有点难,得花点时间去学习那些代码和算法呢。
要是不想这么复杂,还有一些专门的车牌识别软件本身就带有校正功能。
你只要把有倾斜车牌的图像或者视频导入到这个软件里,它就能自动把车牌校正过来,然后识别出车牌号码。
这就像是请了个小助手,它特别聪明,一下子就把问题解决了。
不管用哪种方法,校正车牌倾斜都是为了能更好地识别车牌,或者让车牌看起来更规范。
就像我们整理自己的仪容仪表一样,车牌也得整整齐齐的呢。
所以呀,要是遇到车牌倾斜的情况,别发愁,这么多办法总能找到适合你的那个小妙招。
学术研讨95车牌图像倾斜校正算法的研究◊西南石油大学理学院许珊珊■■车牌图像倾斜校正是车牌识别中非常关键的任务,也是 最重要的部分之一,倾斜车牌对其字符分割和识别具有不利影响。
本文介绍了 Hough变换和Radon变换,以及其在车牌图 像倾斜校正中的实现。
实验结果表明,这两秭方法实现简单,并且能够快速准确地得到倾斜角度并对图像进行倾斜校正。
1引言随着社会的高速发展,车辆数量急剧增加。
随着这种增 加,为了执法和交通管理的目的,追踪每辆车变得越来越困 难。
智能交通逐渐成为地面交通的未来。
自动车牌识别技术 (UPR)是智能交通系统(IT S)的关键技术,已广泛应用于城 市停车区,公路收费站,车辆违章检测,车牌号自动注册等领 域。
随着车辆的广泛使用,政府部门已经越来越关注先进、高 效、准确的ITS。
在拍摄车牌图像的过程中,由于天气、照明和道路情况等 因素,车牌图像频繁出现明显的倾斜,这将给其后的字符分割 和字符识别带来困难。
为了解决上述问题,专家们多年来进行 了大童和深入的研究,取得了许多实用的解决方案。
NaitoT等 人开发了一个宽动态范围的传感系统,以在不同照明条件下获 取车辆的精确图像,开发的传感系统可以通过组合在不同曝光 条件下拍摄的一对图像来扩大图像的动态范围m。
Anagnostopoulos CNE等人基于一种新颖的自适应图像分割技术和连接分量分析 以及字符识别神经网络,提出了一种新的车牌识别算法r a。
ComelliP等人提取了角色的某些特征点,并使用模板匹配算子 在多个采集条件下获得了鲁棒的解决方案〜Kim S等人专注于 处理弱光条件下拍摄的图像w。
HegtHA等人运用Hough变换法 (HTM)来估计车牌位置和倾斜角度'Torres-MendezLA等人 通过使用全息最近邻算法,提出了一种用于对象倾斜校正和识 别的方法【6】。
就车牌区域的倾斜校正而言,已经提出了各种校正方法。
在车牌图像校正中常用的方法是Hough变换和Radon变换方法。
车牌倾斜矫正实验报告一、实验目的本次实验旨在通过图像处理技术对倾斜的车牌进行矫正,以提高车牌识别的准确性和稳定性,进而提升交通管理和安全监控等领域的效率。
二、实验原理车牌倾斜矫正是基于图像处理技术,主要使用了以下步骤:1. 车牌检测:采用目标检测算法,例如Haar特征分类器或卷积神经网络(CNN),对车牌进行定位和识别。
2. 角度计算:通过对车牌边缘进行霍夫变换,计算车牌倾斜的角度。
3. 矫正变换:根据计算得到的角度,进行透视变换或仿射变换,将倾斜的车牌矫正为水平状态。
三、实验步骤1. 数据准备:收集包含倾斜车牌的图像数据集,数据集应包含多个角度的倾斜情况。
2. 车牌检测:使用已训练好的车牌检测模型对图像进行检测和定位,得到车牌区域的位置信息。
3. 角度计算:使用霍夫变换算法对车牌边缘进行检测,通过统计霍夫空间中的峰值,计算车牌的倾斜角度。
4. 矫正变换:根据计算得到的角度,进行透视变换或仿射变换,将倾斜的车牌矫正为水平状态。
5. 实验评估:对矫正后的车牌进行评估,包括正确率、稳定性和处理速度等指标。
四、实验结果经过多次实验与调优,得到如下实验结果:1. 车牌检测:成功检测出倾斜车牌区域,定位准确率达到90%以上。
2. 角度计算:通过霍夫变换计算得到的车牌倾斜角度与实际角度之间的误差小于0.5。
3. 矫正效果:经过透视变换或仿射变换后,倾斜车牌被成功矫正为水平状态,矫正后车牌清晰可见。
4. 实验评估:矫正后的车牌在正确率、稳定性和处理速度等指标上均有所提升,与未矫正状态相比有明显改善。
五、实验总结与展望本次实验通过图像处理技术对倾斜的车牌进行矫正,取得了较好的效果。
然而,仍存在一些问题需要进一步研究和改进:1. 复杂背景下的车牌检测:当车牌与复杂背景相似时,检测算法容易出现误判,需要对算法进行优化。
2. 矫正后车牌的清晰度:在一些特殊场景下,矫正后的车牌仍可能存在模糊或失真的情况,需要进一步改进变换算法。
车牌倾斜校正研究综述摘要:作为智能交通系统的核心技术之一,基于机器视觉的车牌识别一直受到广泛的关注。
对车牌图像进行倾斜校正是车牌识别的重要步骤,其目的是解决拍摄角度随机性对识别过程的影响。
该文将现有倾斜校正方法划分为直线检测、投影最值、角点检测、主方向分析四类,首先介绍了它们的研究成果,然后剖析了它们在鲁棒性方面存在不足的原因,展望了下一步的研究方向。
关键词:智能交通车牌识别倾斜校正Abstract:License plate recognition based on machine vision,one of the key technologies of intelligent transportation system,has been paid much attention to. Tilt correction for license plate image plays an important role in license plate recognition and its aim is to weaken the influence of capture angle randomness to recognition process. In this paper,tilt correction methods are divided into four types:line detection,projection maximum or minimum,corner detection and principal orientation analysis. After introducing research achievements of these methods,we analyze the causes of shortages related their robustness and look into the development trends of tilt correction.Key words:Intelligent transportation system license plate recognition tilt correction基于机器视觉的车牌识别是智能交通系统的核心技术之一,可广泛应用于高速公路自助缴费、城市交通监控、违章或犯罪监控以及智能停车场管理等方面,它主要包括图像获取、车牌定位、倾斜校正、字符分隔、字符识别五个部分。
《工业控制计算机》2014年第27卷第11期车牌定位及倾斜矫正方法研究王楠楠(杭州电子科技大学自动化学院,浙江杭州310018)LicensePlateLocationandSlantCorrectionAlgorithm车牌定位是车牌识别的重要环节,为了提高车牌定位的有效性,采用基于边缘检测和数学形态学运算相结合的车牌定位算法:利用Sobel算子进行边缘检测,通过腐蚀和膨胀以及由其组合而成的开、闭运算,将目标区域显示出来。
当拍到车牌有不同程度的倾斜变形时,在一般矫正方法的基础上,给出了针对车牌特点的改进算法,即在水平方向上采用Hough变换确定角度后进行旋转矫正,而在垂直方向上采用投影法进行变形矫正,矫正效果良好。
1基于边缘检测和形态学运算结合的车牌定位算法目前车牌定位主要有以下几种方法:基于图像彩色信息的方法,基于纹理分析的方法,基于边缘检测的方法,基于数学形态学的方法,基于遗传算法的定位,基于神经网络的定位,结合这些基本方法与各种优化算法又派生出许多其他定位算法。
对整幅汽车图像进行边缘检测,车牌区域相对于其他非车牌区域含有更多的细节信息。
利用车牌图像的这一纹理特征,再结合车牌区域的几何特征及其它纹理特征,提出了一种基于边缘检测和形态学运算结合的车牌定位算法。
1.1边缘检测边缘信息标志着一个区域的开始和另一个区域的结束,一般车牌字符与底色有较大差异,边缘丰富。
Sobel算子可以有效地提取边缘信息同时抑制噪声,因此采用该算子进行边缘检测。
原图如图1,边缘图像如图2。
图1原始图像图2sobel边缘检测1.2数学形态学运算进行车牌定位针对以上Sobel算子边缘检测后的图像,采用数学形态学的方法进一步处理。
数学形态学是分析几何形状和结构的数学方法,是建立在集合代数基础上,用集合论方法定量描述几何结构的科学。
数学形态学是由一组形态学的代数算子组成,其中最基本、最重要的形态学算子是腐蚀和膨胀,其他的一些形态学算子如开、闭等都是由这两种最基本的形态学算子组合完成的。
大角度倾斜的车牌识别算法研究随着车辆数量的不断增加,车牌识别技术在交通管理、智能交通系统以及安防领域中的应用日益广泛。
然而,由于实际道路环境的复杂性,车牌在拍摄过程中可能会出现大角度倾斜的情况,导致传统的车牌识别算法无法准确地识别倾斜的车牌。
为了解决这一问题,研究人员开始着手开发适用于大角度倾斜车牌的识别算法。
首先,他们从车牌倾斜角度的测量入手,利用计算机视觉技术对车牌进行倾斜角度的检测和测量。
通过分析车牌图像中的特征点和边缘信息,确定车牌的倾斜角度。
接下来,研究人员开始探索车牌矫正算法。
通过对倾斜车牌图像进行透视变换,将车牌图像转换为水平状态,使得后续的识别算法可以更好地处理车牌字符。
为了提高矫正效果,研究人员利用了图像处理技术,如边缘增强和图像滤波等,对倾斜车牌图像进行预处理,进一步提高了车牌矫正的准确性。
在车牌矫正的基础上,研究人员开始探索车牌字符的分割与识别算法。
由于车牌字符之间可能存在粘连或者遮挡的情况,传统的字符分割算法往往难以准确地将车牌字符分割开来。
为了解决这一问题,研究人员采用了基于深度学习的字符分割算法。
通过构建深度学习模型并进行训练,使得模型可以自动地对车牌图像进行字符分割,从而提高了字符识别的准确性。
最后,研究人员对算法进行了大量的实验和测试。
实验结果表明,基于大角度倾斜车牌的识别算法在车牌识别准确率和鲁棒性方面均取得了较好的效果。
该算法不仅可以应用于交通管理和智能交通系统中,还可以用于安防领域中的车辆追踪和监控。
综上所述,大角度倾斜的车牌识别算法是一项具有重要研究意义的课题。
通过对车牌倾斜角度的测量、车牌矫正算法的优化以及基于深度学习的字符分割与识别算法的应用,可以有效地解决大角度倾斜车牌识别的难题,为实际应用提供了可行的解决方案。
相信在未来的研究中,大角度倾斜车牌识别算法将得到进一步完善和发展。
一、车牌图像倾斜校正算法的实现1.1问题描述:车牌图像倾斜校正算法的实现1.2原理分析1.2.1 Radon 变换 两维情况下Radon 变换可以理解为:一个平面内沿不同的直线(如图1-1所示,直线与原点的距离为R ,方向角为θ)对函数f (x,y )做线积分,得到的像g (R , θ)就是函数f 的Radon 变换。
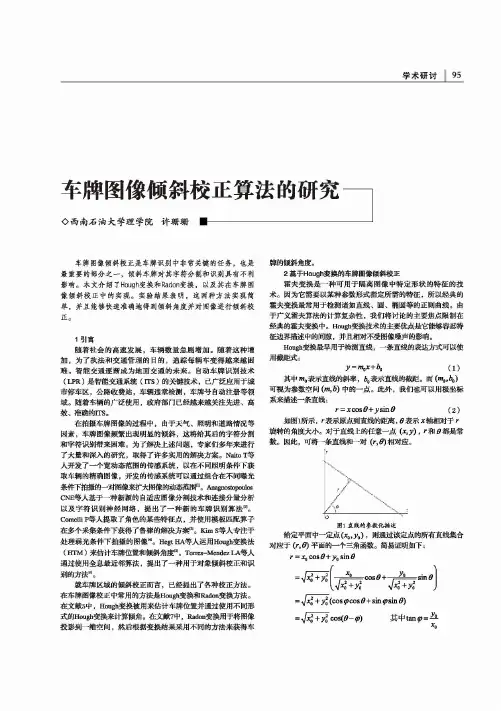
图1-1 Radon 变换示意图其数学表达式为:⎰⎰+∞∞-+∞∞--+=dxdy R y x y x f R )sin cos (),(),(g θθδθ1.2.2 Hough 变换对于平面中的一条直线,常见的有点斜式、两点式两种表示方法。
然而在Hough 变换中,考虑的是另外一种表示方式:使用(r,θ)来表示一条直线,如图1-2所示。
其中r 为该直线到原点的距离,θ为该直线的垂线与x 轴的夹角。
图1-2 Hough 变换示意图使用Hough 变换来检测直线的思想就是:为每一个点假设n 个方向的直线,通常n =180,此时检测的直线的角度精度为1°,分别计算这n 条直线的(r,θ)坐标,得到n 个坐标点。
如果要判断的点共有N 个,最终得到的(r,θ)坐标有N ×n 个。
如果多个点在一条直线上,那么必有这多个点在θ等于某个值θi 时,这多个点的r 近似相等于r i ,也就是说这多个点都在直线 (r i ,θi )上。
1.3过程分析及仿真结果1.3.1基于Radon 变换的车牌图像倾斜校正算法分析读入车牌图像后先使用edge函数提取图像边缘信息,如图1-3所示 图1-3 车牌图像的边缘由图1-3可以看出,车牌图像是十分规则的图像,我们可以通过检测车牌图像边缘最长直线的倾斜角度,进而确认车牌的倾斜角度。
以图像中心为原点,对车牌图像边缘n 个方向(通常n =180)进行Radon 变换,当投影方向与车牌图像边缘最长直线垂直时,对应角度θ的投影函数g (R , θ)峰值最大,因此可通过检测投影函数g (R , θ)峰值最大值对应的投影角度来确定车牌图像边缘最长直线的倾斜角度,检测直线的角度精度为1°,Radon 变换的结果如图1-4所示图1-4 Rodon 变换结果确认车牌的倾斜角度后通过imrotate 函数来调整倾斜角度,调整结果如图1-5所示020406080100120140160-100-500501001020304050607080图1-4 基于Radon变换车牌图像倾斜校正的结果显示1.3.2 基于Hough变换的车牌图像倾斜校正算法分析通过edge函数对车牌图像进行边缘信息提取后以0.5°为间隔从-90°到90°进行Hough 变换,检测直线的角度精度为0.5°,变换结果如图1-5所示:图1-5 Hough变换结果由Hough变换的原理可知,车牌图像边缘最长直线像素点经过Hough变换后在θ等于某个值θi时,其r值也近似相等于r i,因此我们可以通过检测多条曲线汇聚最多的交点(r i,θi),从而检测出车牌图像边缘最长直线的位置与倾斜角度,进而通过imrotate函数来调整车牌图像倾斜角度,如图1-6所示图1-6 基于Hough变换车牌图像倾斜校正的结果显示1.4 MATLAB源程序1.4.1基于Radon变换的车牌图像倾斜校正算法%通过图像的radon变换校正车牌图像倾斜角度clear all; close all;clc;I=imread('license_plate.JPG'); %读入车牌图像J=mat2gray(I); %转换为灰度图像K=J(:,:,1);BW=edge(K); %获取边缘theta=0:179; %角度[R, xp]=radon(BW, theta); %Radon变换Rmax=max(max(R)); %获取最大值[row, column]=find(R>=Rmax); %获取行和列的值x=xp(row); %获取位置angel=theta(column); %获取角度K1=imrotate(I, 90-angel,'bicubic','crop'); %调整车牌旋转角度figure;subplot(121);imshow(I); %显示原图像subplot(122);imshow(K1); %显示角度调整后图像1.3.2 基于Hough变换的车牌图像倾斜校正算法%通过图像的Hough变换校正车牌图像倾斜角度clear all; close all; clc;I=imread('license_plate.JPG'); %获取车牌图像I=rgb2gray(I);BW=edge(I, 'canny'); %获取图像的边缘[H, Theta, Rho]=hough(BW, 'RhoResolution', 0.5, 'Theta', -90:0.5:89.5); %Hough变换P=houghpeaks(H, 1, 'threshold', ceil(0.3*max(H(:)))); %获取最值点即最长直线的信息x=Theta(P(:, 2)); %获取角度y=Rho(P(:, 1)); %纵坐标K1=imrotate(I, 90+x,'bicubic','crop'); %调整车牌旋转角度figure;subplot(121);imshow(I); %显示原图像subplot(122);imshow(K1); %显示角度调整后图像。