自控第三章教案
- 格式:doc
- 大小:1.98 MB
- 文档页数:36




xx科技大学 《自动控制原理》(经典部分)课程教案
授 课 时 间: 适用专业、班级: 编 写 人: 编 写 时 间: 授课学时: 4学时 章节名称 第一章 绪 论 第一节 自动控制的基本原理与方式 第二节 自动控制系统示例 第三节 自动控制系统的分类 第四节 对自动控制系统的基本要求 备注
教学目的和要求
1、 了解自动控制的发展概况。 2、 掌握反馈控制系统的组成及原理。 3、 会根据实际控制系统绘制系统方框图。 4、 掌握控制系统性能的基本要求。
重 点 难 点
重点: 开环控制和闭环控制的区别;反馈控制系统的组成及原理;控制系统性能的基本要求;根据实际控制系统绘制系统方框图。 难点: 根据实际控制系统绘制系统方框图。 难点:根据实际控制系统绘制系统方框图。
教学方法 教学手段
1、 教学方法: 课堂讲授法为主;用精讲多问的方法突出重点, 用分析举例的方法突破难点。 2、 教学手段: 以传统的口述、粉笔加黑板的手段为主。 3、 教学手段:以传统的口述、粉笔加黑板的手段为主。
教学进程设计(含教学内容、教学设计、时间分配等)
一、 引入 (约3min) 从“自动化技术发展历史和应用”引入新课。 二、 教学进程设计 (一)自动控制的发展和应用 (约5min) 1、 应用: 广泛应用于工业、农业、航空、航天、核反应等领域。 2、 发展 (1) 经典控制理论 (2) 现代控制理论 (二)自动控制的基本概念 (约42min) 1、 人工控制和自动控制: 以水箱控制系统为例讲解 (1) 基本概念: (举例) (2) 自动控制: 在无人直接参加的情况下, 利用控制装置使被控对象和过程自动地按预定规律变化的控制过程。 (3) 被控对象: 要求实现自动控制的机器, 设备或生产过程。 (4) 被控量:表现于控制对象或系统输出端, 要求实现自动控制的物理量。 (5) 给定值:作用于控制对象或系统输入端, 并可使系统具有预定功能或预定输出的物理量。 (6) 扰动: 所有影响控制量对被控量按要求进行正常控制的因素 2、 自动控制系统: 是由控制装置和被控对象所组成 3、 组成和方框图 以水箱控制系统为例, 绘制系统方框图。 反馈控制系统基本原理: 用偏差纠正偏差。 (三)基本控制方式 (约30min) 1、 开环控制: 只有前向通道而无反馈通道, 输出信号不影响控制作用。特点是输出不影响输入、控制精度不高。以电机转速控制系统为例讲解按扰动控制和按给定控制两种开环控制方式。 2、 闭环控制:既有前向通道又有反馈通道, 输出信号影响控制作用。特 点是输出影响输入、控制精度高, 因为可能发生超调和振荡, 所以稳定性很重要。以电机转速控制系统为例讲解闭环控制方式。 复合控制: 开环控制和闭环控制的结合。(举例) (四)自动控制系统示例 (约50min) 1、 函数记录仪(例题) 2、 电阻炉温度控制系统(练习) 3、 锅炉液位控制系统(例题) (五)自动控制系统的分类 (约35min) (1) 1.按给定量变化规律分类: (2) 定值控制系统:输出量以一定的精度等于给定值, 而给定值一般不变化。(举例) (3) 程序控制系统: 自动控制系统的被控制量是根据预先编好的程序进行控制的系统。(举例) 随动控制系统: 输出量能以一定精度跟随给定值变化的系统。(举例) (1) 2、按主要元件特性分类: (2) 线性控制系统; (3) 非线性控制系统。 3、 按系统参数是否随时间变化 4、 定常系统: 控制系统的参数在工作过程中不随时间而变化。 5、 时变系统: 控制系统的参数在工作过程中随时间而变化。 6、 按信号是否连续 连续系统: 如果系统中传递的信号都是时间的连续函数, 则称为连续系统。 离散系统:系统中只要有一个传递的信号是时间上断续的信号, 则称为离散系统。 举例分析系统的分类。 (六)对自动控制系统的基本要求 (约30min) (1) 基本要求: (2) 稳定性: 是保证控制系统正常工作的先决条件。 2、 准确性: 说明系统的稳态(静态)品质。 三、 快速性:系统在稳定的条件下, 衡量系统过渡过程的形式和快慢。 四、 典型外作用: 阶跃函数、脉冲函数、斜坡函数、正弦函数。 1、 小结: (约3min) 2、 基本控制方式和组成原理 3、 自动控制系统的分类 4、 对自动控制系统的基本要求 5、 示例 作业: (约2min) P16习题1-1, 1-5 授课学时: 2学时 章节名称 第二章 控制系统的数学模型 第二章 第一节 控制系统的时域数学模型 备注
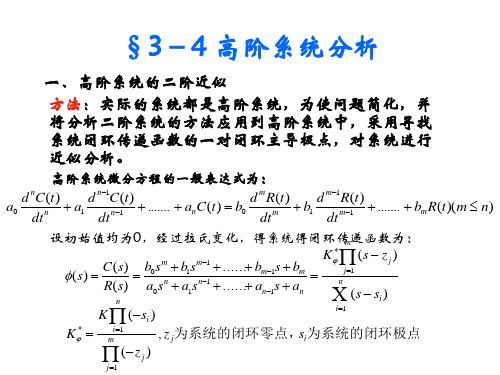
第3章温度测量第1节概述第2节热电偶温度计第3节电阻温度计第4节接触测温的误差分析第5节热电偶与热电阻的校验第6节温度变送器与显示记录仪表第3章温度测量第1节概述一温标二.温度计的分类热工测量与自动控制一温标热工测量与自动控制3 热力学温标热工测量与自动控制第3章温度测量国际实用温标用来复现热力学温标,简称IPTS-68 1990年以国际温标(ITS-90)替代IPTS-68。
在ITS-90中指出:热力学温度(符号为T)是基本物理量,单位为开尔文(符号为K)。
它规定水三相点热力学温度为273.16K,定义开尔文一度等于水三相点热力学温度的1/273.16。
4.国际实用温标9090273.15t T=-t90:国际摄氏温度(℃);T90:国际开尔文温度(K);热工测量与自动控制第3章温度测量ITS-90的一些规定:(1)0.65K 到4He 临界点(5.2K )温度段内用3He 和4He 蒸汽压与温度的关系来确定温度。
(3)平衡氢三相点(13.8K )到银凝固点(962℃),标准仪器应用铂电阻温度汁。
(4)银凝固点(962℃)以上温度区间采用普朗克定律外推。
(2)4He 沸点(4.2K )到氖三相点(24.6K ),在三个规定温度点(氖三相点(24.6K)、平衡氢三相点(13.8K)、4He正常沸点(4.2K))分度过的3He 或4He 气体温度计内插。
热工测量与自动控制二.温度计的分类第3章温度测量第2节热电偶温度计一、热电偶的测温原理二、热电偶的基本定律三、热电偶的类型四、热电偶的构造五、热电偶的特点六、热电偶的冷端温度补偿热工测量与自动控制一、热电偶的测温原理热工测量与自动控制(二)热电偶工作原理热工测量与自动控制2.热工测量与自动控制3.热电偶回路的热电势热工测量与自动控制第3章温度测量目录(一)均质导体定律(二)中间导体定律(三)中间温度定律二、热电偶的基本定律第3章温度测量(一)均质导体定律1. 内容凡是由一种均质导体或半导体组成的闭合回路,不论其截面如何,沿长度方向各处的温度分布如何,都不会产生热电势。
平顶山学院教案 自动控制原理 第三章 时域分析法 3-1 【授课时间】: 【授课形式】:多媒体 【授课地点】: 【授课时数】:2 【授课题目】:时域分析法——时域分析基础及一阶系统分析与计算 【教学目标】 1、掌握几种典型的外作用信号; 2、熟练掌握一阶系统的数学模型和阶跃响应的特点。 3、熟练计算性能指标和结构参数,特别是一阶系统动态性能的计算方法。 4、了解一阶系统的脉冲响应和斜坡响应的特点。 【教学重难点】 一阶系统动态性能的计算方法 【教学内容】 第三章 时域分析法 控制系统的数学模型是分析、研究和设计控制系统的基础,经典控制论中三种分析(时域、根轨迹、频域)、研究和设计控制系统的方法,都是建立在这个基础上的。 3-1 时域分析基础 一、时域分析法的特点 根据系统微分方程,通过拉氏变换,直接求出系统的时间响应。依据响应的表达式及时间响应曲线来分析系统控制性能,并找出系统结构、参数与这些性能之间的关系。 时域分析法是一种直接方法,而且比较准确,可以提供系统时间响应的全部信息。 二、典型初始状态,典型外作用 1. 典型初始状态 通常规定控制系统的初始状态为零状态。 即在外作用加于系统之前,被控量及其各阶导数相对于平衡工作点的增量为零,系统处于相对平衡状态。 平顶山学院教案 自动控制原理 第三章 时域分析法 3-2 2. 典型外作用 ① 单位阶跃函数1(t) ② 单位斜坡函数 ③ 单位脉冲函数 ④ 正弦函数 三、典型时间响应 初状态为零的系统,在典型输入作用下的输出,称为典型时间响应。 1. 单位阶跃响应 定义:系统在单位阶跃输入[r(t)=1(t)]作用下的响应,常用h(t)表示。
若系统的闭环传函为()s,则h(t)的拉氏变换为 1()()()()HssRsss故1()()htLHs (3-1)
2. 单位斜坡响应 定义:系统在单位斜坡输入[r(t)=t·1(t)]作用下的响应,常用()tct表示。
则有21()()()()tCssRsss故1()()ttctLCs (3-2) 3. 单位脉冲响应 定义:系统在单位脉冲输入r(t)=δ(t)作用下的响应,常用k(t)表示。
则有()()()()1()KssRsss故11()()()ktLKsLs (3-3) 4.三种响应之间的关系 由式(3-3)可将式(3-1)和式(3-2)写为: 11()()()HssKsss
22111()()()()tCssKsHssss
相应的时域表达式为
0()()dthtk 0()()dttcth 四、阶跃响应的性能指标 平顶山学院教案 自动控制原理 第三章 时域分析法
3-3 1.峰值时间tp:指h(t)曲线中超过其稳态值而达到第一个峰值所需的时间。 2.超调量%:指h(t)中对稳态值的最大超出量与稳态值之比。
%100)()()(%h
hthp
3.调节时间ts:指响应曲线中,h(t)进入稳态值附近5%h()或2%h()误差带,而不再超出的最小时间。ts小,表示系统动态响应过程短,快速性好。 4.稳态误差ess:指响应的稳态值与期望值之差。 注意事项: %teet,及三项指标是针对阶跃响应而言的,对于非阶跃输入,则只有稳态误差,而没有%和。sss
sss 3-2 一、二阶系统分析与计算 一、一阶系统的数学模型及单位阶跃响应 定义: 由一阶微分方程描述的系统称为一阶系统。
微分方程:)()()(tutudttduCRrcc
当电路的初始条件为零时,其传递函数1111)()((s)TssCRsU
sU
rc
式中T=RC为时间常数。 结构图:
将微分方程)()()(trtcdttdcT,具有传递函数11(s)Ts的系统叫做一阶系统。T的含义随系统的不同而不同。 单位阶跃响应曲线
思考题1: 图中4条一阶系统阶跃响应曲线,时间常数分别为0.5,1,2,5,请标在对应的曲线上。
1/CsUr(s)Uc(s)—1/R R i(t)
)(tur)(tu
c
h(t) 0.632 0.865 0.95 0.982 初始斜率为1/T
h(t)=1-e-t/T 0 t T 2T 3T 4T
1
单位阶跃响应曲线 平顶山学院教案 自动控制原理 第三章 时域分析法
3-4 红色——0.5 黑色——1 绿色——2 蓝色——5 性能指标 1. 平稳性: 非周期、无振荡, =0 2. 快速性ts:
s3()0.95[5%]tTct时,对应误差带
s4()0.98[2%]tTct时,对应误差带 3.准确性 ess:1()0ecss 4.延迟时间:Ttd69.0; 5.上升时间:Ttr20.2; 响应速度与时间常数T成反比,即T越小,响应速度越快,在t=0处最大,并随时间增大而变小,直至为零。 一阶系统的单位脉冲响应 输入r(t)=(t),R(s)=1
输出:--1-1-111101tTgtLCsLGsRsLetTsT,
初始斜率:00.368/tdgtTdt 响应曲线呈单调下降指数曲线,无超调,无振荡,在t=0处下降速率最大,之后速率变小,且下降速率与时间常数T成反比,即T越小,下降速率越快。T反映了系统的惯性。T越小惯性越小,响应快。T越大,惯性越大,响应慢。 平顶山学院教案 自动控制原理 第三章 时域分析法 3-5 输入:221)(ttr 输出:0-1-21111-2231-1-teTTttsTsLsRsLtcTt, 跟踪误差:e(t)=r(t)-c(t)=Tt-T2(1-e-t/T)随时间推移而增长,直至无穷。因此一阶系统不能跟踪加速度函数。 输入信号 输出响应
1(t) 01-teTt,
(t) 01-teTTt,
t 0--tTeTtTt,
22
1t 0-1-21-22teTTttTt,
例3-1:一阶系统的结构如下图所示。试求该系统单位阶跃响应的调节时间ts;如果要求ts(5%)≤0.1(秒),试问系统的反馈系数应取何值? 解: (1)首先由系统结构图写出闭环传递函数
11.0101.01001100ssssX
sXs
rc
得T=0.1s 因此得调节时间sTts3.03,取5%误差带。 (2)求满足ts(5%)≤0.1s的反馈系数值。 假设反馈系数Kt (Kt >0),那么同样可由结构图写出闭环传递函数
101.011001100sKKKs
ss
tt
tB
由闭环传递函数可得 T=0.01/Kt 根据题意要求 ts(5%)≤0.1s 则 ts=3T=0.03/Kt≤0.1s 所以 Kt≥0.3
s100KtXc(s)Xr(s)
—平顶山学院教案 自动控制原理 第三章 时域分析法
3-6 例2 已知单位负反馈系统的单位阶跃响应ateth1)( 试求 Φ(s),G(s) 。
解: assaasssC
11
ssR1
asasRsCs
)(
)(1)()(sGsGs )(])(1)[(sGsGs
)()()()(ssGssG )(1)()(sssG
saasaasasssG1)(1
)()(
G(s)c(t)r(t)—平顶山学院教案 自动控制原理 第三章 时域分析法
3-7 【授课时间】: 【授课形式】:多媒体 【授课地点】: 【授课时数】:2 【授课题目】:时域分析法——二阶系统分析与计算 【教学目标】 1、熟练掌握二阶系统的数学模型和阶跃响应的特点。熟练计算性能指标和结构参数,特别是典型欠阻尼二阶系统动态性能的计算方法; 【教学重难点】 典型欠阻尼二阶系统动态性能的计算方法 【教学内容】 3-2 一、二阶系统分析与计算 二、二阶系统的数学模型及单位阶跃响应 定义: 由二阶微分方程描述的系统称为二阶系统。 二阶系统的数学模型: 二阶系统的微分方程的一般式为
22d()d()2()()dd22nnnctct
ctrttt其中(0)n
——阻尼比
n——无阻尼振荡频率
二阶系统的单位负反馈结构图
二阶系统的传递函数 开环传递函数: