自适应神经模糊推理系统在电动机软起动中的应用
- 格式:pdf
- 大小:243.32 KB
- 文档页数:4
豆丁推荐↓精品文档研究与应用Contr ol and I nstru ments in Chem ical I ndustry 基于自适应神经模糊推理系统的磁悬浮电动机控制李惠光, 张广路, 周巧玲, 杨国良(燕山大学电气工程学院, 河北摘要:磁悬浮电动机是一个非线性、, , 为使该系统具有良好的动态性能和稳定性, , 设计了神经模糊P I D 控制器, , 利用模糊控制的逻辑能力和神经网络的自学习能。
, 采用神经模糊P I D 控制响应快、无超调、过渡时间短, 实现了预期目的。
关键词:解耦线性化; 自适应神经模糊推理系统; 神经模糊P I D 中图分类号:TP273文献标识码:A 文章编号:100023932(2009 05200882041引言磁悬浮电动机因其体积小、临界转速高等优点已成为电磁轴承研究中的前沿课题。
但是, 由于磁悬浮电动机系统的非线性和强耦合性, 制约了其发展和应用的速度。
要实现磁悬浮电动机的稳定悬浮和可控旋转, 必须对径向二自由度悬浮力之间进行动态解耦, 并且需要对悬浮力、转矩、转子磁链之间进行线性化解耦。
近年来, 智能控制的广泛应用为复杂的非线性系统提供了解决办法[1, 2], 国内的研究尚处于理论阶段。
本文应用非线性系统状态反馈解耦理论[3], 实现了磁悬浮电动机的转矩、转子磁链、转子位置之间的动态解耦, 并在此基础上设计了神经模糊P I D 控制器, 该控制器利用模糊逻辑的“概念”能力和神经网络的自学习能力, 通过两者的有机结合寻找最佳的P 、I 、D 非线性组合控制规律, 实现了对被控对象的在线控制, 有效地解决了常规P I D 控制器设计过程依赖于对象精确的数学模型且不能调整P I D 参数的缺点, 有效地增加了系统悬浮偏移量调节的自适应力, 提高了系统的性能。
通过MAT LAB /SI M UL I N K 进行仿真, 结果表明, 该控制方法具有良好的解耦控制效果。

模糊控制在电机驱动系统中的应用模糊控制是一种智能控制方法,广泛应用于各种工程领域中。
在电机驱动系统中,模糊控制技术能够有效地提高系统性能,实现精确的驱动输出。
本文将介绍模糊控制在电机驱动系统中的应用,并探讨其优势及潜在的改进空间。
一、模糊控制原理及基本结构模糊控制是一种基于模糊逻辑的控制方法。
与传统的PID控制相比,模糊控制能够处理非线性、不确定性和模糊性等复杂问题。
其基本结构包括模糊化、模糊推理和解模糊三个步骤。
首先,通过模糊化技术将输入量和输出量转化为模糊集合;然后,基于模糊规则和推理机制进行决策和控制;最后,通过解模糊操作将模糊输出转化为具体的控制信号。
二、模糊控制在电机驱动系统中的应用1. 速度控制在电机驱动系统中,实现精准的速度控制是非常重要的。
传统的PID控制方法在面对非线性负载和传感器误差时可能无法满足要求,而模糊控制则能够更好地适应这些复杂情况。
通过将实际速度和期望速度进行模糊化处理,利用模糊规则确定控制动作,可以实现更为精确的速度调节。
2. 位置控制电机驱动系统中的位置控制是一种高精度的控制需求。
传统方法通常采用PID控制器进行处理,但在存在负载扰动和传感器误差的情况下,控制效果可能有限。
模糊控制通过模糊化位置误差和期望位置,利用模糊规则进行推理,可以更好地应对这些干扰,实现更为准确的位置控制效果。
3. 压力控制在某些特定的电机驱动系统中,需要对输出压力进行控制。
传统方法通常采用PID控制器,但在面对压力控制系统的非线性、不确定性和时变性时,PID控制器可能无法满足控制要求。
模糊控制通过将压力信号模糊化,并利用模糊规则进行推理,可以更好地适应非线性和不确定性系统,实现更为精确的压力控制效果。
三、模糊控制在电机驱动系统中的优势1. 对非线性系统的适应性强传统的线性控制方法在面对非线性系统时可能无法满足要求,而模糊控制正是针对这个问题而设计的。
由于模糊控制基于模糊规则进行推理,能够更好地适应非线性系统的特点,从而实现更为精确的控制。

模糊逻辑在电动机控制中的应用Pierrerguillemin;丘尚初【期刊名称】《技术报道》【年(卷),期】1998(000)001【摘要】今天,对家用电器性能的要求越来越高了。
这些要求包括如电动机的转速对多功能附件的适应性、用户的友好界面及使用安全可靠等。
诸如此类的新要求都要以通过基本的以模糊逻辑为基础手段的微控制器来实现。
现今大多数以模糊逻辑为基础的控制器只限于向用户接口、传感器和调节器发出一系列复杂的、和软件的慢动作相适应的指令。
本文关于模糊逻辑提出一种与此完全不同的新用途。
即将模糊逻辑应用于标准微控制器,通过对电动机电流的实时控制(每隔30ms调节一次)来调节交直流两用电动机的转速。
微控制器是通过斩波变换器(Chopper converter)来直接调控电动机的电流的。
本文从基本的外存信息处理机的应用开始,整篇差不多都在说明,怎样用模糊逻辑的方法来建立一个以廉价的测速发电机反馈元件的指令机器码的生成一步步介绍实践的准则,还给出了在使用模糊逻辑开发工具时如何确定输入参数和建立模糊逻辑规则的实际步骤。
本文的特色是:凡在“实时”快速控制环中涉及到模糊逻辑的地方都用初等方法阐述,避免使用传统调节方法中用到的专门知识。
讨论了这种方法的好处并给出具体结果。
【总页数】12页(P120-131)【作者】Pierrerguillemin;丘尚初【作者单位】不祥;不祥【正文语种】中文【中图分类】TM32【相关文献】BVIEW中模糊逻辑工具箱在形体辨识中的应用 [J], 魏开云;向学军2.可控硅在电动机控制中的应用 [J], 赵山3.集成电路在振动电动机控制中的应用 [J], 林毅;张俊彦4.集成电路在振动电动机控制中的应用 [J], 林毅;张俊彦5.异步电动机控制中软启动技术的应用研究 [J], 徐颖因版权原因,仅展示原文概要,查看原文内容请购买。

电机智能控制中的模糊逻辑应用研究哎呀,说起电机智能控制中的模糊逻辑应用,这可真是个有趣又有点复杂的话题。
咱们先来说说啥是电机智能控制。
你想啊,电机在咱们生活中到处都是,像家里的风扇、空调,工厂里的各种机器设备,都离不开电机。
那怎么让电机更聪明地工作呢?这就需要智能控制啦。
就说我之前在一个工厂里看到的吧,有一台大型的电机负责带动一条生产线的运转。
一开始,这电机的控制方式很简单粗暴,就是开和关,速度也没法很好地调节。
结果呢,产品的质量时好时坏,效率也不高。
这时候模糊逻辑就派上用场啦!那啥是模糊逻辑呢?简单来说,就是不像传统逻辑那样非黑即白,而是有很多中间的模糊状态。
比如说,电机的转速不是只有快和慢两种状态,而是可以有“比较快”“有点慢”“适中”等等这些模糊的说法。
举个例子,我们要控制电机的转速来适应不同的生产需求。
如果按照传统的方法,可能就是设定一个具体的转速数值,比如 1000 转每分钟。
但用了模糊逻辑呢,我们可以设定一些模糊的条件,比如“如果生产线上的产品堆积较多,电机转速加快”,这里的“较多”就是个模糊的概念。
再比如说,在一个智能电梯系统中,电机控制电梯的运行。
根据电梯里的人数多少来调整电机的运行速度。
人少的时候,速度可以慢一点,节省能源;人多的时候,速度就快点,提高效率。
但“人少”和“人多”也没有一个绝对的标准,这就是模糊逻辑发挥作用的地方。
还有啊,在新能源汽车中,电机的智能控制也用到了模糊逻辑。
比如说根据电池的电量、路况、驾驶员的操作习惯等因素,来动态调整电机的输出功率和扭矩。
如果电量不太足了,路况又不太好,那电机就不能太猛出力,得悠着点;要是电量充足,路况也好,那就可以让电机撒欢跑。
总之,电机智能控制中的模糊逻辑应用,就像是给电机装上了一个聪明的大脑,能让它更灵活、更高效地工作,为我们的生活带来更多的便利和效益。
回想我在那个工厂看到的情况,后来用上了模糊逻辑控制的电机,生产线变得顺畅多啦,产品质量也稳定了,效率大大提高。
机电传动控制系统中基于自适应模糊控制的优化设计研究机电传动控制系统是现代工业领域中非常重要的一项技术。
传统的控制方法在面对系统参数变化、外部干扰等问题时表现不佳,因此需要寻找一种更加适应不确定性的控制方法来优化系统设计。
自适应模糊控制是一种基于模糊逻辑推理和自适应机制相结合的控制方法。
它能够通过感知系统状态和输出误差来实时调整模糊规则和模糊参数,以适应系统的动态变化和不确定性。
自适应模糊控制在机电传动系统中应用广泛,能够有效提高系统的性能和鲁棒性。
优化设计是为了在有限的资源和条件下寻求最佳解。
在机电传动控制系统中,优化设计旨在通过调整控制参数和模糊规则等来提高系统的运行效果。
自适应模糊控制的优化设计主要包括以下几个方面:首先,基于系统的数学模型进行仿真分析,以评估控制系统的性能指标。
通过建立系统模型,可以模拟系统的运行过程,并根据系统的需求和性能指标来评估控制效果。
例如,可以考虑系统的稳定性、快速性、精确性等指标。
其次,确定模糊控制的参数和规则。
自适应模糊控制的性能主要依赖于模糊控制器的参数和规则的设计。
参数调整和规则的选择决定了控制系统的行为。
在优化设计中,可以通过试错法、遗传算法、神经网络等方法来确定合适的参数和规则。
此外,针对系统中的不确定性和变化,设计自适应机制来实现模糊控制的调整。
自适应机制能够根据系统的反馈信息实时调整模糊控制的参数和规则,以适应系统的动态变化和不确定性。
常见的自适应方法包括模糊神经网络、模糊遗传算法等,通过学习和适应,不断提高系统的性能。
最后,通过实验和实际应用验证和评估优化设计的效果。
优化设计的目的是提高系统的性能和鲁棒性,因此需要实验和实际应用来验证设计的效果。
通过对比实验和实际应用数据,可以评估优化设计的效果和改进的幅度,为未来的改进提供依据。
综上所述,机电传动控制系统中基于自适应模糊控制的优化设计是一项重要的研究工作。
通过数学建模、仿真分析、参数调整、规则设计、自适应机制和实验验证等方法,能够不断提高机电传动系统的性能和鲁棒性。
基于模糊自适应PID控制的矿用潜水泵电机软启动器
魏磊
【期刊名称】《科技视界》
【年(卷),期】2016(000)001
【摘要】针对矿用高压潜水泵电机在启动过程中存在的过电流问题,本文提出采用模糊自适应PID控制可变电抗器的高压电机软启动控制策略.本系统的核心采用高性能电机控制芯片TMS320F2812,配合电压检测、电流检测等外围电路,实现了高压电机的电流闭环控制.仿真结果证明,与传统电抗器限流软启动相比,该软启动器能使电机在启动初始阶段更加有效地降低启动电流的冲击,使电机平稳启动.
【总页数】2页(P130-131)
【作者】魏磊
【作者单位】安徽理工大学电气与信息工程学院,安徽淮南232001
【正文语种】中文
【相关文献】
1.基于支持向量回归机的矿用潜水泵电动机绝缘寿命预测 [J], 王欣
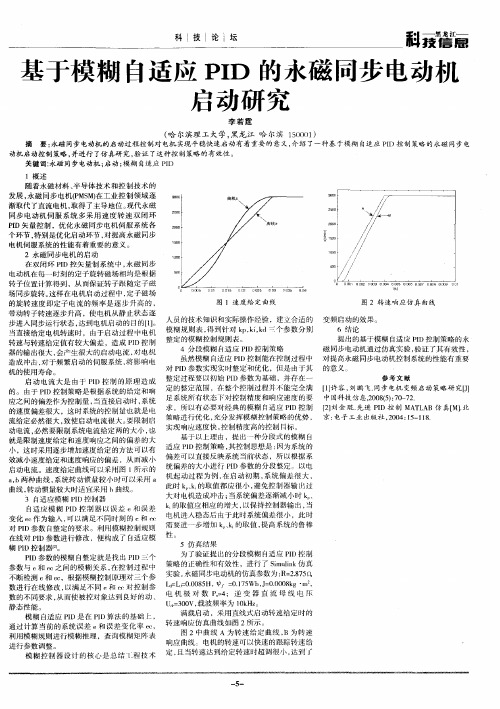
2.基于模糊自适应PID控制的永磁同步电机控制 [J], 邢经纬;徐义鑫
3.基于模糊自适应PID控制的直流电机调速系统 [J], 冉华军;李健;牟书丹
4.基于有限元的矿用潜水泵叶轮的应力与变形分析 [J], 王裕清;张朋飞;李建中;张俊辉
5.矿用潜水泵高功率密度永磁同步电机极槽配合选择分析 [J], 郝雪弟;李宇航;周国昊;唐兵
因版权原因,仅展示原文概要,查看原文内容请购买。
模糊控制技术在智能电力系统中的应用随着智能电力系统的发展,模糊控制技术被广泛应用于电力系统中。
模糊控制技术具有很强的适应性和鲁棒性,能够有效地解决电力系统中存在的模糊性问题,提高电力系统的运行效率和安全性。
一、智能电力系统的发展智能电力系统是在现代信息技术、通信技术和控制技术的基础上,通过各种传感器、信息采集、处理和控制等技术手段,对电力系统进行智能化升级和优化的新型电力系统。
智能电力系统通过信息交流和处理,实现了电力系统的“智能化”,可以对电网的各个环节进行实时监测和控制,从而提高电力系统的运行效率和可靠性。
二、模糊控制技术的原理和特点模糊控制技术是一种针对模糊性问题的控制方法。
传统的控制方法必须以精确的数学模型为基础,但是电力系统往往存在着一些模糊性问题,比如变电所负荷的波动、风电和光伏发电等非常规电源的接入等。
模糊控制技术可以很好地解决这些问题,它是一种基于模糊逻辑的控制方法,从语言的角度描述了变量的含义和规律,基于模糊推理的方法来实现系统的自适应调节。
模糊控制技术的特点主要有以下几点:1. 鲁棒性强:模糊控制技术可以容忍一定范围内的干扰和噪声。
2. 适应性强:模糊控制技术可以适应不同的工作环境和工作状态。
3. 易于实现和调试:模糊控制技术不需要精确的模型和极高的计算能力,易于实现和调试。
4. 高效性:模糊控制技术具有较快的响应速度和较好的稳态性能。
三、模糊控制技术在智能电力系统中的应用1. 模糊控制技术在电力负荷预测中的应用电力负荷预测是智能电力系统中非常重要的一项工作。
模糊控制技术可以通过分析历史负荷数据和环境因素等因素,构建模糊负荷预测模型,从而对未来负荷进行预测和控制。
2. 模糊控制技术在电力稳定控制中的应用电力系统中的稳定性是一项很重要的指标。
模糊控制技术可以根据系统的运行状况,通过模糊控制算法调节系统的控制参数,使得电力系统能够保持稳态运行。
3. 模糊控制技术在电力能源管理中的应用现代电力系统越来越关注电力能源的可再生和清洁性。
PE 电力电子年第期63基于模糊自适应控制的电动机软起动仿真贾媛佟威李红莲于瑛(西安建筑科技大学,西安710055)摘要本文针对三相异步电动机起动电流较大的问题,设计了一种软起动模糊自适应控制器。
软起动可以控制电动机的起动电流,减少起动过程中电流过大对电网和设备的损坏,保证电动机平稳运行。
据其起动特性,将电流误差和误差的变化率作为输入量,晶闸管的控制角作为输出量,设计出一种自调整比例因子的模糊自适应控制算法。
随后在Matlab 环境下仿真其控制性能,并且与常规的PID 控制方法和常规模糊控制方法进行比较,验证了模糊自适应控制算法的优越性。
关键词:软起动;异步电动机;模糊自适应;MatlabSimulation of Soft Startup C ontrol System for M otor Based on Fuzzy Adaptive C ontrolJia Y uan Tong W ei Li Honglia n Y u Y ing(Xi'an University of Architecture and Technology,Xi ’an 710055)Abst ract Considering the large startup current of induction motors ,this paper presents a fuzzyAdaptive control soft starting system.It can control startup current and avoid the inrush of the current for smooth running.According to the characteristic of induction motor ,taking current error and error change rate as input and the angle of thyristor as output ,the fuzzy Adaptive control model for the soft startup of induction motor is established by using fuzzy logical toolbox in Matlab pare in the traditional PID and traditional fuzzy control method ,self-adaptive fuzzy control method is superior.Key words :soft-start ;asynchronous motor ;fuzzy-adaptive ;Matlab1引言三相异步电动机应用广泛,其结构简单,运行维护方便,成本低,寿命长,但其起动特性却一直不理想,起动电流是额定电流的5~7倍。