第5讲LiDAR数据处理(4)1-预处理及点云滤波
- 格式:pdf
- 大小:2.83 MB
- 文档页数:67
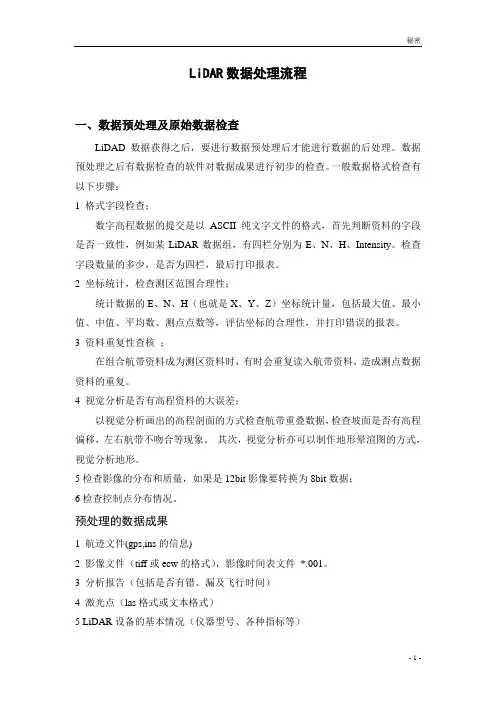
LiDAR数据处理流程一、数据预处理及原始数据检查LiDAD数据获得之后,要进行数据预处理后才能进行数据的后处理。
数据预处理之后有数据检查的软件对数据成果进行初步的检查。
一般数据格式检查有以下步骤:1 格式字段检查;数字高程数据的提交是以ASCII纯文字文件的格式,首先判断资料的字段是否一致性,例如某LiDAR数据组,有四栏分别为E、N、H、Intensity。
检查字段数量的多少,是否为四栏,最后打印报表。
2 坐标统计,检查测区范围合理性;统计数据的E、N、H(也就是X、Y、Z)坐标统计量,包括最大值、最小值、中值、平均数、测点点数等,评估坐标的合理性,并打印错误的报表。
3 资料重复性查核;在组合航带资料成为测区资料时,有时会重复读入航带资料,造成测点数据资料的重复。
4 视觉分析是否有高程资料的大误差;以视觉分析画出的高程剖面的方式检查航带重叠数据,检查坡面是否有高程偏移,左右航带不吻合等现象。
其次,视觉分析亦可以制作地形晕渲图的方式,视觉分析地形。
5检查影像的分布和质量,如果是12bit影像要转换为8bit数据;6检查控制点分布情况。
预处理的数据成果1 航迹文件(gps,ins的信息)2 影像文件(tiff或ecw的格式),影像时间表文件*.001。
3 分析报告(包括是否有错、漏及飞行时间)4 激光点(las格式或文本格式)5 LiDAR设备的基本情况(仪器型号、各种指标等)6 相机校准文件,包括相机的初始位置、像幅大小、畸变改正等。
一般使用前一次飞行的相机文件。
二、数据预处理1 确定项目范围,首先要统计总体数据量,决定点的抽稀程度,以便导入系统进行总体的分块(一般500万个点一块,若每平方米4个点,即0.5米一个点,乘以2倍的重叠系数,计算得出每平方公里800万个点)。
抽稀程度一般100倍以内。
2 设置坐标转换参数。
包括以下几个坐标系:A WGS84 到西安80 ;B WGS84 到北京54C 吴淞高程系到黄海高程系;D WGS84 到地方坐标系3 建立统一的项目名称(project name),由参与工作的人数决定数据所需要分割的块数。

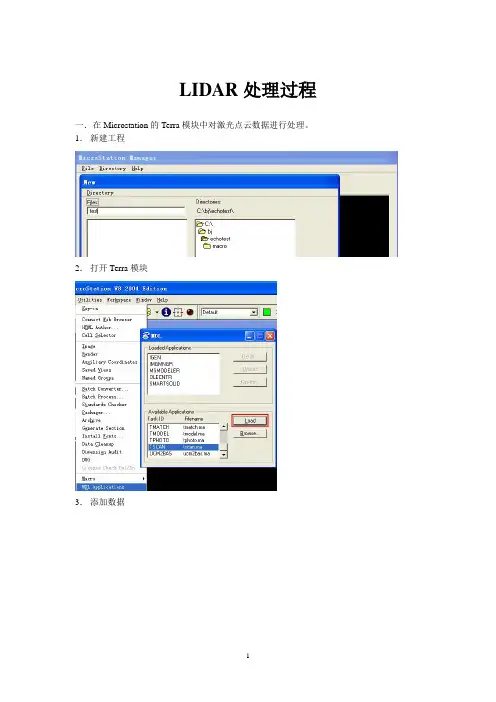
LIDAR处理过程一.在Microstation的Terra模块中对激光点云数据进行处理。
1.新建工程2.打开Terra模块3.添加数据先add再done;Increase by file表示按照文件来给航线编号,即一个*.las表示为一条航线。
数据导入之后可以以多种方式来显示:按分类、按回波、按高程、按航线、按强度、按距离等。
4.数据预处理飞行时所获取的数据往往有冗余,处理时可只选择需要的部分做处理,将这些点挑出来,步骤如下:①利用Microstation的基础工具划出需要处理的点云,如果点数较多,可分为若干块;②在Tscan的工具条中选择Define Project,新建project,将选中区域内的点导入到project中。
→→再次选择导入的*.las数据,即可将需做处理的点导入到该project中,导入后project中显示点数(上右图),目标文件夹中出现*.bin文件。
将原来的点关掉,重新加载需要做处理的点,结果如下右图。
5.自定义点集系统默认的给出了8种类型的点集,也可自定义添加点集。
6.点云滤波、去噪将点云中明显的噪声点剔除掉。
多个数据块时一般可采用批处理的方式,建立批处理的方法如下。
①将所有的点分类到default类中,②//去除航带重叠,//③//去除low point,可单个点去除,也可以小组点去除,//④去除孤立点,⑤若通过上述几步之后,仍有明显可通过绝对高程判断为噪声的点,也应去除(如云上点等)6.地面点提取(ground),各阈值可根据需要更改;7、水面点提取(Water)对于水面点的提取,需要借助于人为的判读,由于水面吸收雷达激光,当看到明显的大区域的Lidar点稀少时,可认为是水域,实际分类中,需要用到分类中的“By absoluteelevation”功能,如下操作:借助于“Identify”工具,在水域中随机读取高程值,得到大概的水域的高程范围,例如0.11~0.24,如果有影像的支持,人工绘制水域边界多边形,然后利用“Classify”-〉“Inside fence”能得到更精确地Water类别效果:/*7.利用回波信息从地面点(ground)中剔除植被①将具有多重回波特性的激光束中第一次回波分类到high vegetation②将第二次回波分类到medium vegetation8.从地面点中抽取一定密度的点用于构建地面模型,各阈值可根据需要更改;9.平滑、保存、*/输出最终的批处理列表如下图:,保存后即可随时调用。
LiDAR数据处理与应用技巧引言LiDAR(Light Detection and Ranging)是一种常见的光学测量技术,广泛应用于地质勘探、城市规划、农业和环境监测等领域。
本文将探讨LiDAR数据的处理方法和应用技巧,帮助读者更好地应用和分析这些宝贵的数据。
1. 数据采集与处理LiDAR数据的采集通常通过使用激光扫描仪在飞行器或车辆上进行。
这些仪器通过发射激光束,并记录其反射回来的时间来测量目标物体的距离。
由于激光束的高速扫描,可以获得准确的三维坐标数据。
为了提高数据质量,我们需要进行一系列的数据处理步骤。
首先,我们需要去除噪声和异常值。
这可以通过使用滤波算法来实现,例如高斯滤波或中值滤波。
接下来,我们可以进行点云配准,将多个扫描组合成一个完整的点云模型。
这可以通过使用ICP(Iterative Closest Point)算法来实现。
2. 地形分析与三维模型生成一旦我们完成了数据的处理,就可以开始进行地形分析和三维模型生成。
对于地形分析,我们可以使用高程数据进行坡度和高程变化的分析。
这对于地质勘探和城市规划非常重要。
此外,我们还可以使用LiDAR数据生成数字地形模型(DTM)或数字表面模型(DSM),以提供更详细的三维地貌信息。
另一方面,我们可以利用LiDAR数据生成真实感的三维模型。
这可以通过使用贴图和纹理映射等技术来实现,使得模型更具真实感。
这对于游戏开发和虚拟现实等应用非常有用。
3. 物体检测与分类LiDAR数据还可以用于物体检测和分类。
通过分析点云数据的密度和形状,我们可以识别出建筑物、树木、车辆等不同的物体。
这对于城市规划和环境监测非常重要。
此外,我们还可以使用机器学习算法,如支持向量机和随机森林,来自动识别和分类点云数据。
4. 遥感与生态研究LiDAR数据与遥感技术相结合,可以提供更全面的生态研究。
例如,通过分析树木的高度和分布,我们可以研究森林的生长和变化。
此外,通过分析地表覆盖和土地利用,我们可以评估生态系统的健康状况和环境质量。
点云滤波算法
点云滤波是一种有效的三维数据处理算法,它可以帮助研究人员去除噪声和其他类型的异常信息,以有效和准确地识别出感兴趣的目标点或形状。
点云滤波算法是应用计算机技术对目标特征之间分组,具有丰富的形式和技术,在几乎所有的三维数据处理任务中都很有用,这无疑也增加了计算繁琐性。
点云滤波算法一般使用空间坐标系统(如平面坐标,球面坐标,极坐标)来测量数据的空间关系,根据空间关系来滤波噪音和离群点。
它可以提取偏离规律的密集或合理的空间位置的点,以便识别感兴趣的形状,有效识别出复杂环境中的目标。
点云滤波算法常用的滤波技术是空间域滤波,其基本思想是比较当前点与其邻域(比如其所属网格)中的其他点之间的差异。
空间域滤波常用的算法有KNN、体素算法、基于密度的聚类等,根据距离的不同,可以给噪声和离群点分出不同的分类,有效清除影响结果的信息。
另一种常用的滤波方法是投影滤波,它假定一个点的投影的结构是规律的,然后提取相同规律的投影特征,根据特征来反映点的结构分布和密度,以此来抑制噪声和离群点,更有利于目标提取和分类。
总之,点云滤波算法在三维数据处理中功能十分重要,有效的滤波技术可以帮助研究人员提取有价值的信息,准确地识别出感兴趣的目标。

激光雷达点云(lidar)的目标检测方法全文共四篇示例,供读者参考第一篇示例:激光雷达点云(lidar)技术是目前自动驾驶领域非常重要的一项技术,通过激光雷达传感器可以实时获取周围环境的点云数据,从而实现环境感知和目标检测。
在自动驾驶车辆中,目标检测是非常关键的一环,它能够帮助车辆识别出路上的障碍物、行人、车辆等目标,并做出相应的决策和控制。
激光雷达点云的目标检测方法通常可以分为两类:基于传统特征的目标检测和基于深度学习的目标检测。
传统特征的目标检测方法常常利用点云数据的几何特征、颜色信息等来进行目标的识别和分类,而深度学习的目标检测方法则是通过训练深度神经网络来学习点云数据的特征表示,从而实现目标的检测和识别。
在传统特征的目标检测方法中,常用的算法包括Hough Transform、RANSAC、DBSCAN等。
Hough Transform是一种常用的直线检测算法,它通过将点云数据转换到参数空间中,利用累积直方图来识别出直线。
RANSAC算法是一种随机抽样一致性算法,它通过随机选择一组点来拟合出目标形状的模型。
DBSCAN算法是一种基于密度的聚类算法,它可以有效地识别出不同密度的点云数据中的目标。
在深度学习的目标检测方法中,常用的算法包括PointNet、PointNet++、Frustum PointNet等。
PointNet是一种基于点云数据的端到端的神经网络,它可以直接输入点云数据进行目标检测和分类。
PointNet++是PointNet的扩展版本,它通过分层聚类的方法来提高点云数据的特征提取性能。
Frustum PointNet是一种将2D图像信息和3D点云信息结合起来的目标检测算法,它可以有效地检测出路上的目标并进行精确定位。
激光雷达点云的目标检测方法是自动驾驶领域中非常重要的一项技术。
随着深度学习技术的不断发展和应用,基于深度学习的目标检测方法在自动驾驶领域中将会变得越来越重要。
Lidar数据处理(⽂字原理)五、航空遥感数据处理2、LIDAR数据处理LIDAR数据的处理主要分为三步:原始数据格式转换、点云分类、DEM⽣成。
三个步骤分别在ALSPP、Terra Solid及Erdas Imagine 软件中完成。
Lidar数据处理流程图如下:1)Lidar原始数据格式转换Lidar原始数据的格式转换完成由Lidar原始数据向激光点云数据转换的⼯作,此步⼯作在ALSPP中完成。
Lidar原始数据记录脉冲发射⾓度、脉冲发射与返回的时间、脉冲返回强度、回波的次数等信息。
将原始Lidar 数据与由IPAS 解算出的定位定向数据相结合,计算出每⼀束激光所探测地物的三维坐标,由此⽣成的Lidar 数据表现为⼤量悬浮的、离散的没有属性信息的点阵,我们称之为“点云”。
数据转换原理:在机载Lidar 系统中,利⽤惯性测量单元(IMU )获得飞⾏过程中的3个姿态⾓(,,ω?κ),通过GPS 获得激光扫描仪中⼼坐标(000,,X Y Z ),最后利⽤激光扫描仪获取扫描仪⾄地⾯点的距离D ,由此可以计算出此刻地⾯上相应激光点(,,X Y Z )的空间坐标为:0000(,,)0X X Y Y R Z Z D ω?κ=+??????距离D 根据激光脉冲发射与返回的时间差计算得到,公式如下:12D c t =? 式中,c 为光速,t ?为激光脉冲发射与返回的时间差。
2)激光点云分类激光点云分类以分离出⽤于建⽴数字地⾯模型的激光脚点为最终⽬的,此步⼯作在Terra Solid 软件中完成。
Terra Solid 系列软件是基于MicroStation 开发的,主要有TerraScan 、TerraPhoto 、TerraModel 等模块,激光点云分类主要在TerraScan 模块中进⾏。
根据数据所覆盖区域的地形特征,利⽤点云的⾼程、强度、回波等多种特征信息,进⾏点云去噪滤波、地⾯点提取等操作,步骤如下:①航带重叠区域数据优化组合数据获取时,为保证对区域的全覆盖,相邻两条点云数据间会存在重叠,数据处理时仅保留重叠区域内质量较好的点进⾏后续操作。
LiDAR点云预处理方法研究刘晓亮;陈晓轩;安瑶军;隋立春【摘要】本文以机载LiDAR技术在公路勘察设计领域中所获取的点云数据为例,针对其点云数据特点,探讨研究LiDAR点云数据预处理方法.该方法首先基于假设检验的方法剔除原始点云中的粗差点,然后使用形态学滤波方法得到地面点云,最后使用曲率抽稀算法对地面点云进行抽稀处理,从而得到密度适宜的点云数据.实验表明,本文预处理方法能够去除粗差点以及大量冗余信息,在满足精度的同时能够保留真实有效的地形特征点,减小了存储空间,提高了点云处理速度,具有一定的实用价值.【期刊名称】《测绘技术装备》【年(卷),期】2018(020)004【总页数】3页(P25-27)【关键词】LiDAR点云;粗差;滤波;抽稀;预处理【作者】刘晓亮;陈晓轩;安瑶军;隋立春【作者单位】长安大学地质工程与测绘学院陕西西安710054;陕西省交通规划设计研究院陕西西安710065;长安大学地质工程与测绘学院陕西西安710054;长安大学地质工程与测绘学院陕西西安710054;地理国情监测国家测绘地理信息局工程技术研究中心陕西西安710064【正文语种】中文1 引言机载激光雷达(LiDAR)是一种综合利用全球定位系统(GPS)、惯性导航系统(INS)和激光测距系统的新型空间测量技术,能够快速获取高精度地面三维坐标等数字信息,在地形测绘、公路建设等方面具有广泛的应用[1]。
相比传统测量技术具有数据获取速度快、精度高、自动化程度高、受天气影响小等优势。
近些年来机载LiDAR技术被广泛应用于公路建设领域,通过一次测量即可获得大量三维地形信息,满足公路地形测绘及公路改扩建等工程的精度要求,现已成为我国公路勘察设计的主要地形数据来源之一[2]。
但是,在实际工程应用中地面测区普遍规模庞大,通过机载LiDAR系统获取的数据量极大,点云数据中存在大量冗余信息和粗差点,严重影响数据存储及交互、DEM构建、断面提取等后续应用的效率或精度。
lidar数据处理流程Answer in English:LiDAR Data Processing Workflow.1. Data Acquisition.The first step in the LiDAR data processing workflow is to acquire the data. This can be done using a variety of methods, including airborne, mobile, and terrestrial scanning.2. Data Preprocessing.Once the data has been acquired, it must be preprocessed before it can be used for analysis. This includes removing noise from the data, correcting for geometric distortions, and aligning the data with other data sources.3. Feature Extraction.The next step is to extract features from the LiDAR data. These features can include terrain elevation, vegetation height, and building heights.4. Classification.The extracted features can then be used to classify the data. This can be done using a variety of methods,including supervised and unsupervised classification.5. Analysis.The classified data can then be analyzed to produce a variety of products, including maps, elevation models, and vegetation maps.Answer in Chinese:激光雷达数据处理流程。
如何进行LIDAR数据处理与分析引言:随着技术的不断发展,激光雷达(LIDAR)技术的应用越来越广泛。
LIDAR技术通过激光器发射激光束,并通过接收器捕捉反射回来的信号,从而测量距离、形状和表面特征。
在各个领域如地理信息系统(GIS)、环境监测、城市规划等,LIDAR数据处理与分析起着重要的作用。
本文将重点讨论如何进行LIDAR数据处理与分析,为读者提供一些有用的方法和技巧。
一、数据采集与预处理在进行LIDAR数据处理与分析之前,首先需要进行数据采集与预处理。
数据采集阶段是获取原始LIDAR数据的过程。
通常,这个过程由专业的测绘人员和仪器设备完成。
采集到的原始数据通常包括点云数据、位置和姿态信息等。
在采集到原始数据后,还需要进行预处理。
预处理包括去除噪声点、数据过滤和坐标转换等步骤。
通过去除噪声点,可以提高数据质量和精度。
数据过滤可以根据需求,对数据进行筛选和剔除。
而坐标转换则是将数据统一到特定的坐标系统中,以便后续的分析和处理。
二、特征提取与目标识别在进行LIDAR数据处理与分析时,特征提取和目标识别是非常关键的一步。
通过提取地物的特征,可以更好地理解和描述地物的形状、结构和属性。
目标识别则是将地物分类为预定义的目标类别,如建筑物、树木、道路等。
特征提取可以通过各种算法和方法来实现,例如基于高度、密度、形状等的特征提取。
常见的方法包括基于半径的特征提取、点云拟合和分割等。
通过这些方法,可以对地物进行准确的描述和分析,为后续的目标识别提供支持。
目标识别是将特征提取得到的地物分类为不同的目标类别的过程。
这需要借助于机器学习和人工智能等技术。
常用的方法包括支持向量机(SVM)、随机森林(Random Forest)和深度学习等。
这些方法可以利用已知的地物样本进行训练和预测,从而实现地物的自动分类和识别。
三、地形分析与三维建模地形分析是利用LIDAR数据对地表地貌进行分析和研究的过程。
通过地形分析,可以获取地形起伏、坡度、坡向等地貌信息,为地理学、地质学等领域研究提供数据支持。