平面折展机构S形柔性铰链设计与试验
- 格式:pdf
- 大小:328.54 KB
- 文档页数:6
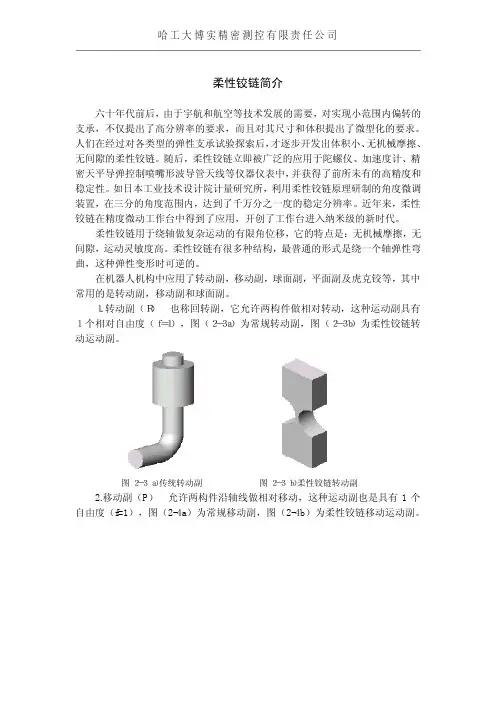
七、柔性铰链微动机构的分析与设计一. 实验目的1.认识柔性四连杆机构的形貌2.了解柔性铰链工作台的工作原理及应用前景3.掌握柔性铰链的分析与设计方法4.掌握微位移工作台的分析与设计方法二. 柔性铰链微动机构的用途与发展前景由于宇航和航空等技术发展的需要,对实现小范围内偏转的支承,不仅提出了高分辨率的要求,而且对其尺寸和体积提出了微型化的要求。
人们在经过对各类型的弹性支承的实验探索后,才逐步开发出体积小无机械摩擦、无间隙的柔性铰链。
随后,柔性铰链立即被广泛地用于陀螺仪、加速度计、精密天平、导弹控制喷嘴形波导管天线等仪器仪表中,并获得了前所未有的高精度和稳定性。
如日本工业技术院计量研究所,利用柔性铰链原理研制的角度微调装置,在3分的角度范围内,达到了1000万分之一度的稳定分辨率。
近年来,柔性铰链又在精密位移工作台中得到了实用。
柔性铰链微位移机构具有较高的位移分辨率,再配合压电陶瓷驱动器可实现微小位移,可适合各种介质环境工作。
微位移技术直接影响到微电子技术等高精度工业的发展,如微电子技术随着集成度的提高,线条越来越微细化,与之相对应的工艺设备:光刻机、电子束和x射线曝光机等,其定位精度要求为线宽的1/3~1/5,即亚微米甚至纳米级的精度,这就要求精密工作台具备相应的技术水准,柔性铰链是关键技术之一。
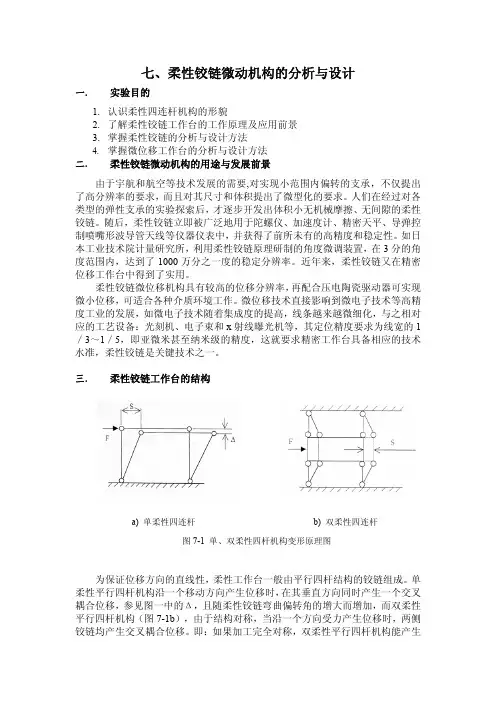
三. 柔性铰链工作台的结构a) 单柔性四连杆b) 双柔性四连杆图7-1 单、双柔性四杆机构变形原理图为保证位移方向的直线性,柔性工作台一般由平行四杆结构的铰链组成。
单柔性平行四杆机构沿一个移动方向产生位移时,在其垂直方向同时产生一个交叉耦合位移,参见图一中的Δ,且随柔性铰链弯曲偏转角的增大而增加,而双柔性平行四杆机构(图7-1b),由于结构对称,当沿一个方向受力产生位移时,两侧铰链均产生交叉耦合位移。
即:如果加工完全对称,双柔性平行四杆机构能产生严格的直线运动,从原理上克服了单柔性平行四杆机构易产生交叉耦合位移的缺陷,是超精密定位系统的首选结构,双柔性工作台结构参见图7-2。
第!"卷第#期$%&#年#月哈’尔’滨’工’程’大’学’学’报()*+,-.)/0-+12,3,42,55+2,46,275+829:;).<!"=<#>*4<$%&#具有提升功能的新型柔性铰链设计邱丽芳!陈明坤!冷迎春!王晶琳!北京科技大学机械工程学院"北京&%%%#!$摘’要!针对目前具有提升功能的柔性铰链设计较少的情况!设计了一种新型提升平板折展柔性铰链&9E5.2/92,4.-K 2,-5K 5+45,9D )2,9!O N O 3(’!给出了其三维结构!采用伪刚体模型法推导了该提升铰链的拉伸等效刚度计算公式"通过对设计实例进行有限元仿真分析!并与应用公式计算得到的拉伸等效刚度理论值进行对比!得到拉伸刚度的理论值与仿真值基本一致!误差在?k 以内!验证了拉伸等效刚度计算公式的正确性"最后!通过"组不同结构参数设计实例的理论计算和仿真分析!进一步验证了该拉伸等效刚度计算公式的有效性"关键词!提升功能$柔性铰链$拉伸等效刚度$结构设计$仿真分析$平板折展机构()*%&%B &&""%C D E5*<$%&F%&%G?网络出版地址!E99A %C C H H H <I ,J2<,59C JI K 8C L59-2.C $!B &!"%<*<$%&#%M&"<&??G<%%M<E9K .中图分类号!Y0&$$’文献标志码!>’文章编号!&%%GN F%M!&$%&#’%#N &!#"N %G (/1%’&,.&/64,2$5%"&09%&’/6%095%.0%&’.8&40%,&l P 6O 2/-,4"X 03V[2,4J*,"O 3V W_2,4I E*,"@>V W(2,4.2,!TI E)).)/[5I E-,2I -.3,42,55+2,4"6,275+829:)/TI 25,I 5-,L Y 5I E,).)4:c 52D 2,4"c 52D 2,4&%%%#!"X E2,-$<;10#"40%X ),82L5+2,49E-99E5+5-+5I *++5,9.:/5H/.5]21.5E2,45L5824,8H 29E .2/92,4/*,I 92),"9E28A-A5+A+585,989E5L5824,)/-,5H.2/92,4.-K 2,-5K 5+45,9D )2,9!O N O 3($H 29E -9E+55N L2K 5,82),-.89+*I 9*+5<Y E5I -.I *.-92),/)+N K *.-)/9E55]95,82),5\*27-.5,9892//,588)/9E5O N O 3(I )K A.2-,9E2,45H -84275,1:9E5A85*L)+242LN 1)L:K )L5."-,L 9E55]95,82),5\*27-.5,9892//,588)/9E5L5824,E2,45H -8-,-.:d 5L *82,49E5/)+K *.-<Y E5L5824,5]-K A.58H 5+5-,-.:d 5L *82,4/2,2955.5K 5,9-,-.:828"H E2I E 75+2/25L 9E582K *.-92),7-.*5)/9E55]95,82),892//,5889)151-82I -..:I ),82895,9H 29E 9E59E5)+592I -.7-.*5"H E5+59E5+5.-92755++)+28.5889E-,?k<Y E*8"9E5-I I *+-I :)/9E5I -.I *.-92),/)+K *.-)/5]95,82),5\*27-.5,9892//,5882875+2/25L<V 2,55]-K A.58H 29E L2//5+5,9A-+-K 595+88E)H 5L .2J5H 285A)82N 9275+58*.9"/*+9E5+75+2/:2,49E5/)+K *.-<=/36,#-1%.2/92,4/*,I 92),#I )K A.2-,9E2,45#5]95,82),5\*27-.5,9892//,588#89+*I 9*+5L5824,#82K *.-92),-,-.:828#.-K 2,-5K 5+45,9K 5I E-,28K 8!O 3[8$收稿日期!$%&F ^%&^&#<网络出版日期!$%&#^%M ^$!<基金项目!国家自然科学基金项目!?&MF?%!F $<作者简介!邱丽芳!&"GG ^$"女"教授<通信作者!邱丽芳"3N K -2.%\./a*891<5L*<I ,<’’折纸艺术与变胞机构结合"用同一薄片材料制成的)可在制造平面之外运动的一种新的柔性机构类型"被0S @3O O 定义为平板折展机构!O -K 2,-5N K 5+45,9K 5I E-,28K 8"O 3[8$&&’(它既可以实现如四杆机构)滑块机构等简单的运动"还能实现如球面四杆机构)T-++*8机构等复杂的运动&$’(柔性铰链是保证O 3[8功能实现的最关键因素"因此它的设计是非常重要的(柔性铰链具有结构简单)运动平稳)无需润滑)无回退空程)无摩擦)无间隙)无噪声)无磨损)空间尺寸小)高精度等优点&!’"而作为柔性铰链的一个重要分支"平板折展柔性铰链!O-K 2,-5K 5+45,9D )2,9"O 3($还同时具备了基于单层平面材料制造的特点(目前对平板折展扭转柔性铰链!O-K 2,-5N K 5+45,99)+82),-."O 3Y $的研究已做了大量工作"文献&M ^?’中提出了O 3Y )内O 3Y 和外O 3Y "建立了它们的等效刚度模型"推导了铰链的扭转等效刚度和拉压等效刚度"并进行了有限元验证#文献&G ’中提出了当下较为常用的几种柔性铰链机构设计分析方法"并进行了对比总结#文献&F ^#’中提出了梳齿形柔性铰链)T 形柔性铰链"这些铰链有更加良好的弯曲性能"作用较小的弯矩就可得到较大的转角#文献&"’将文献&#’中的T 形铰链与外O3Y 结合"设计了一种TNO 3Y 复合型柔性铰链"改善了铰链的扭转性能#文献&&%’综合了椭圆柔性铰链与O3Y 的优势"提出了一种能实现平面内及平面外转动的二自哈’尔’滨’工’程’大’学’学’报第!"卷由度柔性铰链#文献&&&’中提出了OS S R 形柔性铰链"并将其应用于O 3[8升降机构中#文献&&$’串联了三个外O3Y 后设计了基于串联式的Y +2A.5N O 3Y "进一步增强了铰链的弯曲能力#文献&&!’在外O3Y 柔性铰链中增加了拉伸片段"设计出了抗拉柔性铰链#文献&&M ^&?’中提出的P N O 3()Y N O 3(和PY N O 3(增大了柔性铰链的抗拉压载荷承受能力"虽然弯曲性能略有降低"但是其拉压载荷承受能力却得到了很好的改善"并给出了三种柔性铰链的扭转等效刚度计算公式等(目前关于具有提升功能的柔性铰链设计以及其拉伸等效刚度研究的文献相对较少"文献&&G ’提出了一种为福斯公司的气动阀门控制器设计的具有提升功能的柔性平面正交弹簧#文献&&F ’将四个单层线性弹簧串联起来"设计出了具有四倍提升位移的多层线性弹簧#文献&&#’中在设计卡片微型注射器时提到了柔性提升弹簧设计理念"但是上述文献中均未提及如何计算它们的拉伸等效刚度(因此"本文结合文献&M ’中提出的O3Y 的拉压刚度以及文献&&"’中的伪刚体模型"设计一种可用于提升平台的新型提升平板折展柔性铰链!ON O 3($"推导其拉压等效刚度的计算公式"并利用有限元仿真软件对该ON O 3(进行仿真分析"将理论计算值和仿真分析值进行对比(&’O N O 3(柔性铰链的等效刚度分析&B &’结构设计柔性铰链主要是通过柔性片段的变形实现其功能"单个柔顺片段大变形具有局限性"易产生较大的应力"也易出现塑性变形或疲劳断裂等现象(因此设计的O N O 3(的变形将通过多个柔顺片段的变形累积来实现(如图&所示"根据铰链变形中各片段所发挥的不同作用"对铰链进行划分"主要包括弯曲片段和连接片段两种"设计该铰链为正方形"边长’’’为P "厚度为&(图$为O N O 3(的尺寸示意图(其中连接片段和弯曲片段的宽度相同"均为I &"连接片段的长度均为B"弯曲片段长度的关系满足%P &f P ^$!I &i B $"P $)P !)P M )P ?)满足P D f P D ^&^$I &"将连接片段视为刚性片段(图>?^:^R c 三维模型A %’B >?E(2,-/5,.^:^Rc图D?^:^R c 尺寸示意图A %’B D?(%2/&1%,&5";/51,.^:^R c 4,2$5%"&09%&’/&B $’等效弹簧模型铰链受到图&所示!力作用时"根据文献&M ’将O N O 3(的弯曲片段等效成弯曲弹簧"此结构是关于A 轴对称的"根据对称性"每两个对称的弯曲片段具有相同的等效弹簧刚度"图!为铰链的等效弹簧模型(图E?^:^R c 等效弹簧模型A %’B E?R I 8%7"5/&01$#%&’2,-/5-%"’#"2,.^:^R c*%"!&*第#期邱丽芳"等%具有提升功能的新型柔性铰链设计’’根据弹簧的串并联关系"其拉伸等效刚度为95I <89+59I E ’$T &&9&1&9$1+&9D’D ’&"$"!"M "?!&$式中9D 为单个弯曲片段的拉伸等效刚度(&B !’拉伸等效刚度计算公式推导柔性铰链在受到拉力时"根据胡克定律"每一段铰链的受力与位移之间的关系为!’9DI !$$式中%!为施加在柔性铰链上的拉力"I 为铰链的拉’’’伸距离(如图&所示"在铰链上作用力!"以9&片段为例"在计算时需要将力!平移至图&中的E 点"根据力的等效原理"片段受到!力和弯曲力矩的共同作用(根据文献&$%’"该片段可被视为末端受载荷的柔性固定^导向梁"如图M !-$所示"它的一端被.固定/"另一端被.导向/"末端的角度是保持不变的"且变形关于中心线反对称"在点,处"片段的变形角最大"曲率为%"力矩为%(9&片段可看作由两个反对称的半段柔性悬臂梁组成"其自由体图解如图M !1$所示(图J?D >片段受力分析A %’B J?A ,#4/"&"531%1,.D >.#"’2/&0’’根据悬臂梁的伪刚体模型假设"在悬臂梁的末端作用力!"可分解为平行于伪刚体杆"沿末端路径法线方向的力!)和与伪刚体杆垂直)与末端路径相切的力!&"!&在特征铰链处产生一个扭矩"使该杆发生变形"如图?所示(图X?悬臂梁伪刚体模型受力分析A %’B X ?A ,#4/"&"531%1,.$1/8-,:#%’%-:;,-32,-/5,.09/4"&0%5/7/#;/"2载荷的切向分量为!&’!I )8;!!$此载荷可以无量纲化为无量纲的横向载荷指标!-$$&"即!-$$&’!&P &$M \U !M $式中%\为弹性模量"[R -#U 为弯曲片段的惯性矩"K K M #P &为弯曲片段9&的长度"K K (力与变形的关系可以表示为!-$$&’G ;;!?$且有;’9+%;’!&)P &$!G $式中%G ;为刚度系数#)为特征半径系数"近似取值分别为$BG?和%B #?(联立式!M $h !G $可得该悬臂梁的扭簧常数方程为9+%’$)G ;\UP &!F $且联立式!!$)!G $)!F $得;I )8;’)P &!$9+%’9!#$由于;比较小"可以认为;$82,;"则;I )8;’82,;I )8;’)P &!$9+%’9!"$因此82,;’9&19槡$!&%$9&片段的提升位移为I ’)P &82,;!&&$把式!"$)!&%$代入式!&&$"得I ’)P &82,;’)P &9&19槡$’)$P &!!&G )$9’$\$U $1)$P &$!槡$!&$$’’由于在实际中\$2)$P &$!$"因此在进行计算*&"!&*哈’尔’滨’工’程’大’学’学’报第!"卷时"可以将)$P&$!$忽略掉"则式!&$$变成I’)P&82,;’)P&!!M G’\U!&!$将式!&!$代入式!$$中得到单个弯曲片段的拉伸等效刚度为9 &’!I’M G’\U)P&!!&M$同理"根据式!&M$可以求出片段9$)9!)9M)9?的拉伸等效刚度"将其代入式!&$即可求得此O N O3(的拉伸等效刚度为95I<89+59I E ’#G;\U)!P&!1P$!1P!!1P M!1P?!$!&?$$’实例计算与仿真分析$B&’尺寸设计与拉伸等效刚度计算选取铍青铜作为O N O3(的材料"其弹性模量\f&B$#p&%?[R-"泊松比4f%B$""屈服强度为CKf&B&F p&%![R-(设计铰链尺寸为G%K KpG%K K"厚度&f%B?K K"I&f$K K"B f&K K"弯曲片段数量为&%"计算得出所有弯曲片段的长度为P&f?M K K"P$f?%K K"P!f MG K K"PMf M$K K"P?f!#K K"代入式!&?$中即可以求出O N O3(柔性铰链的拉伸等效刚度95I<89+59I E f&!%B F$"V C K($B$’有限元仿真及验证为验证理论计算的正确性"在>1-\*8软件中建立设计实例的有限元仿真模型"在!f G V时"铰链’’’’的变形云图如图G)F所示(由图G可得"在G V力的作用下"该铰链的最大应力为&B%"p&%![R-"小于铍青铜的屈服强度&B&F p&%![R-"不会发生塑形变形"根据图F铰链在5方向的提升位移为MGB"M K K"如表&所示(图Y?^:^R c柔性铰链的应力变形云图A%’B Y?W0#/11$5,05,.^:^R c A R<2,-/5图Z?^:^R c柔性铰链的位移变形云图A%’B Z?(%1$5"4/2/&0$5,0,.^:^R c A R<2,-/5表&’^:^R c柔性铰链的力和位移值C";5/&’A,#4/"&--%1$5"4/2/&0-"0",.^:^R c!C V%&&B?$$B?!!B?M MB???B?G I C K K%#B$FF&$B!F&GB M$$%B M!$MB!#$#B$"!$B&M!?B"!!"B GF M!B!M MGB"M ’’分别对铰链施加不同的力!"可以得出多组该铰链的提升位移数据"如表&所示"根据表&得到铰链的仿真刚度为&$FB?V C K(铰链的仿真刚度与理论刚度之间的相对误差为#’395I"89+59I E-98398T&%%[!&"$式中%95I<89+59I E为理论刚度"98为仿真刚度(代入数据计算得出"此铰链的理论刚度和仿真刚度的误差为$B?!$k(为了验证公式的通用性"分别选取I&f B)I&f $B)I&f!B"材料其余参数同前"分别进行O N O3(柔性铰链的拉伸等效刚度的理论计算和仿真分析"得到理论计算值95I<89+59I E)仿真值98)相对误差值#"如表$所示(由表$可得"误差均在?k以内"验证了公式的正确性和设计的可行性(为了进一步验证公式的通用性"令B f%B?K K"弯曲片段数目为&$"分别选取I&f B)I&f$B)I&f!B)I&f M B)I&f?B)I&f G B"材料其余参数同前"分别进行O N O3(的拉伸等效刚度的理论计算和仿真分析"得到理论计算值95I<89+59I E)仿真值98)相对误差值#"如表!所示(由表$可得"误差均在?k以内"再次验证了公式的正确性和设计的可行性(表$’E f&22$&%个弯曲片段$^:^R c柔性铰链的拉伸等效刚度理论值(仿真值及误差C";5/$’C9/09/,#/0%4"5"&-1%285"0%,&7"58/,.09//K0/&:1%,&10%..&/11"&-09/%##/5"0%7//##,#1,.^:^R c6%09E f&22$&%;/&-%&’1/’2/&01I&C p&%^!K拉伸等效刚度95I<89+59I EC!V*K^&$仿真刚度98C!V*K^&$相对误差#C k&MGB##?M?B?!B%MM$&!%B F$"&$FB?$B?!$!$FMB G#!$FF%B#!G*$"!&*第#期邱丽芳"等%具有提升功能的新型柔性铰链设计表!’E f%B?22$&$个弯曲片段$^:^R c柔性铰链的拉伸等效刚度理论值(仿真值及误差C";5/!’C9/09/,#/0%4"5"&-1%285"0%,&7"58/,.09//K0/&:1%,&10%..&/11"&-09/%##/5"0%7//##,#1,.^:^R c6%09E f%B?22$&%;/&-%&’1/’2/&01I &C K K拉伸等效刚度95I<89+59I EC!V*K^&$仿真刚度98C!V*K^&$相对误差#C k%B?&GB&G?&GB!%B#!&&!#B"&M!"B%%B$$%&B?F%B?&!F%B F%B!??$&&!B FF"&&!B$%B?%"$B?&F$B%&F&F$B"%B?&&!$M#B F?#$?&B G&B&!%’’理论计算刚度与仿真刚度之间存在误差可能是由于下列原因造成的%&$在进行理论计算时"没有考虑连接片段的变形"而在实际仿真中"它们也会产生微小的变形"这些微小的变形被累加后形成误差"并且弯曲片段的长度越长误差越大#$$仿真时划分的网格大小也会造成误差(!’结论’’&$设计了一种具有提升功能的新型平板折展柔性铰链!O N O3($并给出了其三维结构和等效弹簧模型"推导出了该铰链的拉伸等效刚度计算公式( $$通过设计实例拉伸等效刚度的理论计算和有限元仿真分析"得到结果基本一致"其相对误差在?k以内"验证了O N O3(柔性铰链拉伸等效刚度理论公式的正确性#!$通过对"组设计实例拉伸等效的刚度理论计算以及有限元仿真分析"得到了基本一致的拉伸刚度理论计算值和仿真值"误差均在?k以内"进一步验证了该拉伸等效刚度理论公式的有效性(参考文献!&&’0S@3O OOO"[>W O3c_T R"S O T3Vc[<柔顺机构设计理论与实例&[’<陈贵敏"于靖军"马洪波"等译<北京%高等教育出版社"$%&?<0S@3O O O O"[>W O3c_T R"S O T3Vc[<0-,L1))J)/I)K A.2-,9K5I E-,28K8&[’<X03V W*2K2,"_6(2,4D*,"[>0),41)"59-.<9+-,8<c52D2,4%024E5+3L*I-92),R+588"$%&?<&$’于靖军"郝广波"陈贵敏"等<柔性机构及其应用研究进展&(’<机械工程学报"$%&?"?&!&!$%?!^G#<_6(2,4D*,"0-)W*-,41)"X03VW*2K2,"59-.<T9-95N)/N -+9)/I)K A.2-,9K5I E-,28K8-,L9E52+-AA.2I-92),8&(’< ()*+,-.)/K5I E-,2I-.5,42,55+2,4"$%&?"?&!&!$%?!^G#<&!’>O c b3X0Y T3VVc"[>W O3c_T R"0S@3O OOO<P N L5,92/:2,4A)95,92-.-AA.2I-92),8/)+.-K2,-5K5+45,9K5I E-N,28K8*82,495I E,).)4:A*8E A+)L*I9L575.)AK5,9&X’C C R+)I55L2,48)/$%&%P,95+,-92),-.g5824,3,42,55+2,4Y5I EN ,2I-.X),/5+5,I58-,L X)K A*95+8-,L P,/)+K-92),2,3,42N ,55+2,4X),/5+5,I5<[),9+5-."l*515I"X-,-L-"$%&%%?&!^?$&<&M’(>X S c T3V(S"X03V W*2K2,"0S@3O OOO"59-.< O-K2,-5K5+45,99)+82),-.!.59$D)2,9&(’<[5I E-,28K-,LK-I E2,59E5)+:"$%%""MM!&&$%$%"#^$&%"<&?’>Y3VlY"(3V T3Vcg"0S@3O OOO<W5)K59+2I-..: ,),N.2,5-+-,-.:828)/9E2,N/2.K I)K A.2-,9[3[T72-8E5..-,L8).2L5.5K5,98&(’<‘2,2955.5K5,982,-,-.:828-,L L5N 824,"$%&$"M"!&$%F%^FF<&G’于靖军"裴旭"毕树生"等<柔性铰链机构设计方法的研究进展&(’<机械工程学报"$%&%"MG!&!$%$^&!<_6(2,4D*,"R3P Q*"c P TE*8E5,4"59-.<T9-95N)/N-+98)/ L5824,K59E)L/)+/.5]*+5K5I E-,28K8&(’<()*+,-.)/K5NI E-,2I-.5,42,55+2,4"$%&%"MG!&!$%$^&!<&F’邱丽芳"孟天祥"张九俏"等<梳齿形柔性铰链的设计与分析&(’<东北大学学报!自然科学版$"$%&M"!?!"$%&!&G^&!$%<l P6O2/-,4"[3V WY2-,]2-,4"U0>V W(2*\2-)"59-.<g5N 824,-,L-,-.:828)/I)K1N8E-A5L/.5]*+5D)2,9&(’<()*+,-.)/V)+9E5-895+,6,275+829:!,-9*+-.8I25,I5$"$%&M"!?!"$%&!&G^&!$%<&#’邱丽芳"孟天祥"张九俏"等<平面折展机构T形柔性铰链设计与试验&(’<农业机械学报"$%&M"M?!"$%!$M^!$#"!$!<l P6O2/-,4"[3V WY2-,]2-,4"U0>V W(2*\2-)"59-.<g5N 824,-,L9589)/.-K2,-5K5+45,9K5I E-,28K8TN8E-A5L/.5]N *+5E2,45&(’<Y+-,8-I92),8)/9E5X E2,5858)I259:/)+-4+2N I*.9*+-.K-I E2,5+:"$%&M"M?!"$%!$M^!$#"!$!< &"’邱丽芳"庞大千"陈家兴"等<TN O3Y复合型柔性铰链设计与性能研究&(’<农业机械学报"$%&G"MF!$$%M%#^M&$<l P6O2/-,4"R>V Wg-\2-,"X03V(2-]2,4"59-.<g5824,-,L A5+/)+K-,I5-,-.:828)/.-K2,-5K5+45,9K5I E-,28K8TN O3Y N8E-A5L/.5]*+5E2,45&(’<Y+-,8-I92),8)/9E5X E2,5858)I259:/)+-4+2I*.9*+-.K-I E2,5+:"$%&G"MF!$$%M%#^M&$<&&%’刘凯"曹毅"周睿"等<二自由度平板折展柔性铰链的分析及优化&(’<航空学报"$%&F"!#!$$%!%M^!&!<O P6Z-2"X>S_2"U0S6b*2"59-.<>,-.:828-,L)A92N K2d-92),)/9H)N L54+55)//+55L)KO3[8/.5]*+5E2,45&(’<>I9--5+),-*92I-59-89+),-*92I-82,2I-"$%&F"!#!$$%!%M^!&!<&&&’邱丽芳"陈家兴"张九俏"等<平面折展升降柔顺机构设计&(’<农业机械学报"$%&?"MG!&%$%!F%^!F?<l P6O2/-,4"X03V(2-]2,4"U0>V W(2*\2-)"59-.<g5N 824,)/.-K2,-5K5+45,95.57-9)+K5I E-,28K&(’<Y+-,8-I N92),8)/9E5X E2,5858)I259:/)+-4+2I*.9*+-.K-I E2,5+:"$%&?"MG!&%$%!F%^!F?<&&$’邱丽芳"印思琪"谢仲添"等<基于串联式Y+2A.5N O3Y 的O3[8滑块机构分析&(’<农业机械学报"$%&G"MF!G$%!#&^!#G<*!"!&*哈’尔’滨’工’程’大’学’学’报第!"卷l P 6O 2/-,4"_P VT2\2"Q P 3U E),492-,"59-.<>,-.:828)/.-K 2,-5K 5+45,98.2L5+K 5I E-,28K 81-85L ),85+2589+2A.5N O 3Y &(’<Y +-,8-I 92),8)/9E5X E2,5858)I 259:/)+-4+2I *.N 9*+-.K -I E2,5+:"$%&G "MF !G $%!#&^!#G<&&!’曹毅"刘凯"单春成"等<抗拉柔性铰链的理论建模及有限元分析&(’<光学精密工程"$%&G "$M !&$%&&"^&$?<X >S_2"O P 6Z -2"T0>VX E*,I E5,4"59-.<Y E5)+:K )LN 5.2,4-,L /2,2955.5K 5,9-,-.:828)/95,82.5/.5]*+5E2,45&(’<S A92I 8-,L A+5I 282),5,42,55+2,4"$%&G "$M !&$%&&"^&$?<&&M ’@P O g P V WT 3"0S @3O O O O "[>W O 3c _T R <P ,9+)L*I N92),)/A.-,-+I )K A.2-,9D )2,98L5824,5L /)+I )K 12,5L 15,N L2,4-,L -]2-..)-L2,4I ),L292),82,.-K 2,-5K 5+45,9K 5I E-,28K 8&(’<[5I E-,28K -,L K -I E2,59E5)+:"$%&$"?G %&^&?<&&?’g 3O P [S V YP O "[>W O 3c _T R "0S @3O O O O <37-.*-N92,4I )K A.2-,9E2,4545)K 59+258/)+)+24-K 2N 2,8A2+5L K 5I EN -,28K 8&X ’C C R +)I 55L2,48)/$%&M P ,95+,-92),-.g 5824,3,N 42,55+2,4Y 5I E,2I -.X ),/5+5,I 58-,L X )K A*95+8-,L P ,/)+N K -92),2,3,42,55+2,4X ),/5+5,I 5<c *//-.)"V 5H _)+J "6T>"$%&M %;%?c Y %#>%!M<&&G ’R >b P T3(("0S @3O OOO "[>W O 3c _T R <S +9E)N A.-N,-+.2,5-+N K )92),8A+2,48&(’<[5I E-,28K -,L K -I E2,59E5)+:"$%%&"!G !&&C &$$%&$#&^&$""<&&F ’[>W O 3c _T R "W S O V P X ZR T "0S @3O O O O <>,2,9+)NL*I 92),9)K *.92.-:5+.-K 2,-5K 5+45,9K 5I E-,28K 8&(’<()*+,-.)/K 5I E-,2I -.L5824,"$%&&"&!!!#$%%#&%%G<&&#’[>W O 3c _T R ">O c b 3X 0Y T3V V c "0S @3O OOO <682,4.-K 2,-5K 5+45,9K 5I E-,28K 89)L575.)A I +5L29N I -+LN 82d 5L A+)L*I 98&X ’C C R +)I 55L2,48)/$%&&P ,95+,-92),-.g 5N 824,3,42,55+2,4Y 5I E,2I -.X ),/5+5,I 58-,L X )K A*95+8-,L P ,/)+K -92),2,3,42,55+2,4X ),/5+5,I 5<@-8E2,49),"g X "6T>"$%&&%$$!^$!&<&&"’_6_*5\2,4"0S @3O OOO "O 6TZ X "59-.<g :,-K 2IK )L5.2,4)/I )K A.2-,9K 5I E-,28K 81-85L ),9E5A85*L)N +242LN 1)L:K )L5.&(’<()*+,-.)/K 5I E-,2I -.L5824,"$%%?"&$F !M $%FG%^FG?<&$%’0S @3O OOO <柔顺机构学&[’<余跃庆"译<北京%高等教育出版社"$%%F<0S @3O O O O <X )K A.2-,9K 5I E-,28K 8&[’<_6_*5\2,4"9+-,8<c 52D 2,4%024E5+3L*I -92),R +588"$%%&<本文引用格式%邱丽芳"陈明坤"冷迎春"等<具有提升功能的新型柔性铰链设计&(’<哈尔滨工程大学学报"$%&#"!"!#$%&!#"^&!"M<l P 6O 2/-,4"X 03V[2,4J*,"O 3V W_2,4I E*,"59-.<g 5824,)/,5HI )K A.2-,9E2,45H 29E .2/92,4/*,I 92),&(’<()*+,-.)/0-+12,3,42,55+2,46,275+829:"$%&#"!"!#$%&!#"^&!"M<*M "!&*。
柔性铰链设计与CAE验证
郭志英;李吉泉;郭婷婷
【期刊名称】《模具工业》
【年(卷),期】2010(36)6
【摘要】柔性铰链设计依赖于预期使用要求、塑料材料及注射加工过程,为此探讨了完全弹性、完全塑性、弹塑性柔性铰链几何设计的理论公式,分析了注射加工对柔性铰链弯曲寿命的影响。
通过实际案例,采用模流分析软件预测了注射加工中不同模具设计对柔性铰链弯曲寿命的影响。
【总页数】3页(P64-66)
【关键词】柔性铰链;注射;弯曲次数;CAE验证
【作者】郭志英;李吉泉;郭婷婷
【作者单位】上海佑司电器科技有限公司;浙江工业大学特种装备制造与先进加工技术教育部重点实验室
【正文语种】中文
【中图分类】TQ320.66;TH122
【相关文献】
1.基于柔性铰链的柔性放大机构参数化设计 [J], 卢倩;黄卫清;孙梦馨
2.柔性铰链转动刚度分析与验证 [J], 鲁亚飞;范大鹏;陈峰军;范世珣
3.含柔性铰链的仿人机器人柔性足设计及动力学仿真 [J], 张亚平;周建军;陈耀
4.用CAE优化发动机前罩板铰链机构的设计 [J], 王菊;禹慧丽;赵会
5.基于CAE分析的铰链式塑料瓶盖注射模设计 [J], 朱计;张增;张杰;类彦威
因版权原因,仅展示原文概要,查看原文内容请购买。
平面柔性铰链导向机构刚度分析与实验测试王洪喜;王艳波;白朝辉【摘要】柔性导向机构是精密仪器设计中的一种重要的导向形式,其在导向方向的刚度计算是机构设计的关键技术.基于材料力学的弯矩方程,推导出平面柔性铰链的抗弯刚度解析式,并采用能量法求解出平面柔性铰链导向机构的刚度解析式.为验证解析公式的正确性,设计并加工了平面柔性铰链导向机构,在精密弹簧拉压实验仪上进行刚度测试,实验结果与理论计算结果进行对比,二者的相对误差为4.7%,证实了解析公式的正确性.【期刊名称】《西安工业大学学报》【年(卷),期】2012(032)008【总页数】5页(P631-635)【关键词】平面柔性铰链;刚度;导向机构;簧片【作者】王洪喜;王艳波;白朝辉【作者单位】西安工业大学机电工程学院,西安710032;西安工业大学机电工程学院,西安710032;西安西正印制有限公司,西安710077【正文语种】中文【中图分类】TH703柔性铰链是一种特殊的机构形式,它用材料可逆的弹性变形来传递运动和能量,在宇航、制造、光学、生物工程等诸多领域都有广泛应用[1-3],尤其是近几年,在微位移、微定位、测量、光学平台、微调整机构、大型天线空间展开机构等工程技术领域应用越来越多.柔性铰链因在结构上的一体化设计和利用弹性形变产生运动和传递能量,它具有无空回、无摩擦、无间隙、无噪声、无磨损、运动灵敏度高等特点.平面柔性铰链是柔性铰链中的一种,一般采用普通的片簧加工而成,加工成本低,结构装配简单,特别适合于精密机械设计领域.采用平面柔性铰链设计的导向机构与传统的导向机构相比具有结构紧凑、零部件少、导向精度高、不需要润滑等.1 柔性导向机构的基本形式采用柔性机构作为导轨,用以实现高精度导向[4-7],其常用结构形式如图1所示的四种平行四边形平动导向机构,按照顺序分别命名为Ⅰ型、Ⅱ型、Ⅲ型和Ⅳ型.其中Ⅰ型是一种典型的半直圆柔性铰链导向机构,结构接凑,稳定性好,但铰链部分易疲劳;Ⅱ型是带加强板的平行簧片导向机构.该机构用簧片代替加工成型的柔性铰链,其抗疲劳能力要好于Ⅰ型,但零件较多;Ⅲ型为平行簧片导向机构,该机构结构简单,但整体的稳定性不如Ⅰ型和Ⅱ型;Ⅳ型为平面柔性铰链导向机构,该机构克服了Ⅰ型易疲劳的弱点,在稳定性上又优于Ⅲ型,是一种很有应用潜力的一种柔性导向机构.图1 柔性导向机构示意图Fig.1 Dagram of flexure guiding mechanism四种柔性导向机构中的前三种机构有文献进行详细的分析和论述[8-17],而平面柔性铰链导向机构(Ⅳ型)在实践中应用较少,从目前的文献中尚未发现有相关的设计理论.文中以材料力学的弯矩方程为基础,通过理论推导给出了平面柔性铰链的抗弯刚度和导向机构的刚度解析公式;设计加工实验样件,并在弹簧拉压实验机上进行了测试,对比分析解析公式计算结果和测试结果,用来验证解析公式的正确性.2 平面柔性铰链的抗弯刚度如图1(d)所示的由平面柔性铰链构成的导向机构,其平面铰链部分的结构如图2所示,由厚度为h的不锈钢板切割而成半径为R的平面铰链,其中最窄处的宽度为t,O点为铰链的对称中心,O′点为所切割的半圆的圆心,设沿坐标轴x方向任意一点处铰链的宽度为b(x),z轴垂直于铰链表面,在沿y轴方向为铰链施加力矩My,铰链处将产生垂直于铰链平面方向的弯曲变形,如图2(b)所示. 图2 平面柔性铰链结构示意图Fig.2 Diagram of planar flexure hinge在力矩My的作用下,铰链产生转角为α,根据材料力学弯矩公式有式中:Iy(x)是与x相关的绕y轴方向的抗弯模量,将直角坐标变换为极坐标对上式进行积分,可得对于如图2所示的半直圆,积分限为(-π/2,π/2),带入式(2),可得铰链的抗弯刚度Kα可以表达为将式(2)带入到式(3)中,得到刚度为为了实现精密导向功能,采用如图1(d)所示的平行四边形机构做为导向机构.当该机构在力F的作用下产生位移δ,导向机构变形示意图如图3所示,则铰链处产生转角α与δ的关系为式中:L为铰链的跨距,一般情况下,δ≪L,工程上可以近似为图3 平面柔性导向机构变形示意图Fig.3 Deformation of planar flexure guiding mechanism根据能守恒关系,导向机构在力F作用下产生位移δ所做的功转变为铰链变形的弹性势能,有将式(4)和式(5)带入式(6),得到导向机构的刚度K3 导向机构刚度测试为了验证平面柔性铰链导向机构的刚度解析式(8)的正确性,设计了一套如图1(d)所示的平行四边型导向机构,图4是设计加工的样件照片.该机构主要由两片平面柔性铰链和两块刚性支撑板构成.平面柔性铰链采用了硬化后的304不锈钢薄板线切割加工而成,为减轻重量,支撑块由硬铝合金材料加工,簧片的参数见表1. 图4 平面柔性铰链导向机构照片Fig.4 Photo of guiding mechanism with planar flexure hinge表1 平面柔性铰链参数表Tab.1 Parameters of planar flexure hinge用弹簧拉压仪对该导向机构进行测试,该仪器的力测量分辨率为0.002N,位移分辨率为0.01 mm.通过手动进给,记录进给的位移和对应导向机构弹性力,得到力和位移关系曲线如图5所示.采用最小二乘法做直线拟合,得到该机构的刚度为1.01N/mm,按照理论式(7)计算刚度为1.06N/mm,相对误差为4.7%,测试结果小于理论计算结果,其误差来源主要在于式(7)中只考虑了簧片铰链部分的变形,没考虑整个簧片的变形. 图5 机构刚度测试与理论计算结果对比Fig.5 Compaarison between tested mechanism rigidity and theoretical results采用平面柔性铰链导向机构设计了CNC齿轮测量中心一维测头防撞装置,如图6所示.该装置主要由一维TESA测头、平面柔性导向机构和位置传感器等构成.当测针受到撞击后,推动TESA测头后退,位置传感器感测到测头位移的变化后将信息传送到控制系统,控制驱动电机将整个测头向后退到安全位置,实现了TESA测头的安全保护.图6 测头防撞装置照片Fig.6 Photo of crashworthy mechanism of probe4 结论由材料力学的挠曲线微分方程推导出平面柔性铰链的抗弯刚度解析式,在此基础上应用能量守恒关系得到了平面柔性铰链的刚度公式,通过加工样件进行测试验证导向机构刚度解析式的正确性.1)实验测试表明,平面柔性铰链解析公式与实际测试结果的误差为4.7%,理论计算刚度大于测试结果;2)产生误差的原因在于解析公式中只考虑了铰链部分变形,没有考虑簧片其他部分的变形.此外,材料的弹性模量、簧片加工尺寸的不确定性等对测量结果均有一定的影响.为了提高平面柔性铰链刚度计算精度,刚度计算解析公式中应将整个簧片的变形考虑进去,另外,需要将簧片材料的弹性模量、簧片加工尺寸的不确定性等影响因素加以考虑,以形成完善的平面柔性铰链导向机构分析理论.【相关文献】[1]PAROS J M,WEISBERG L.How to Design Flexure Hinge[J].Machine Design,1965,37(27):151.[2]NICOLAE pliant Mechanisms:Design of the Flexure Hinges[M].New York:CRC Press,2003[3]NICOLAE L,MATT C,MUHAMMAD A,et al.A Generalized Analytical ComplianceModel for Transversely Symmetric Three Segment Flexure Hinges[J].Review of Scientific Instruments,2011,82:105116.[4]宗光华,余志伟,毕树生,等.直角切口柔性铰链平行四杆机构的屈曲分析[J].航空学报,2007,28(3):729.ZONG Guang-hua,YU Zhi-wei,BI Shu-sheng,et al.Buckling Analysis of the Parallel Four-bar Mechanism Right-angle-notch Flexure Hinges[J].Acta Aeronautica et Astronautica Sinica,2007,28(3):729.(in Chinese)[5]于志远,姚晓先,宋晓东.基于柔性铰链的微位移放大机构设计[J].仪器仪表学报,2009,30(9):1818.YU Zhi-yuan,YAO Xiao-xian,SONG Xiao-dong.Design of Micro-displacement Amplifier Based on Flexure Hinges[J].Chinese Journal of Scientific Instrument,2009,30(9):1818.(in Chinese)[6]QING S X,YANG M L.Analytical Modeling Optimization and Testing of a Compound Bridge-type Compliant Displacement Amplifier[J].Mechanism and Machine Theory,2011,46:183.[7]CHOIA B J,SREENIVASANA S V,JOHNSONA S,et al.Design of Orientation Stages for Step and Flash Imprint Lithography [J].Precision Engineering Journal of the International Societies for Precision Engineering and Nanotechnology,2001,25 :192. [8]WANG H X,ZHAO J,GAO R J,et al.A Novel Constant-force Scanning Probe Incorporating Mechanical-magnetic Coupled Structures[J].Review of Scientific Instruments,2011,82:075101.[9]YUEN K Y,LU T F,DANIEL C,HANDLEY.Review of Circular Flexure Hinge Design Equations and Derivation of Empirical Formulations[J].Precision Engineering,2008,32:63.[10]TIANA Y,SHIRINZADEH B,ZHANG D,et al.Three Flexure Hinges for Compliant Mechanism Designs Based on Dimensionless Graph Analysis[J].Precision Engineering,2010,34:92.[11]SYDENHAM P H.Elastic Design of Fine Mechanism in Instruments[J].Journal Physical Engineering:Science Instrument,1984,17:922.[12]刘庆玲.变截面柔性铰链变形分析计算方法[J].机械设计,2010,27(4):14.LIU Qing -ling.Deflection Anlysis Method of the Variable Cross Section Flexure Hinge[J].Journal of Machine Design,2010,27(4):14.(in Chinese)[13]卜巾晏,何广平.柔性铰链精密定位机构的设计与分析[J].机械设计与研究,2009,25(3):44.BU Jin-yan,HE Guang-ping.Design and Analysis of Postitioning Compliant Mechanisms[J].Machine Design and Research,2009,25(3):44.(in Chinese)[14]左行勇,刘晓明.三种形状柔性铰链转动刚度的计算与分析[J].仪器仪表学报,2006,27(12):1725.ZUO Xing-yong,LIU Xiao-ming.Calculation and Analysis of Rotational Stiffness for Three Types of Flexure Hinges[J].Chinese Journal of Scientific Instrument,2006,27(12):1725.(in Chinese)[15]张建雄,孙宝元.基于柔性铰链结构的二维微动工作台的设计分析[J].压电与声光,2006,28(5):624.ZHANG Jian-xiong,SUN Bao-yuan.Design and Analysis of 2-DOF Nanopositioning Stage Based on Dual Flexure Hinges [J].Piezoelectectrics &Acoustooptics,2006,28(5):624.(in Chinese)[16]周志平,王隆太马志新.两级对称式柔性铰链位移放大机构的设计与分析[J].机械设计与研究,2006,22(5):62.ZHOU Zhi-ping,WANG Long-tai,MA Zhi-xin.Design and Analysis on Two-stage Symmetric Displacement Magnifying Mechanism with Flexible Hinges,2006,22(5):62.(in Chinese)[17]杜志江,董为,孙立宁.柔性铰链及其在精密并联机器人中的应用[J].哈尔滨工业大学学报,2006,38(9):1469.DU Zhi-jiang,DONG Wei,SUN Li-ning.Flexure Hinge and Its Application in Precision Parallel Manipulators[J].Journal of Harbin Institute of Technology,2006,38(9):1469.(in Chinese)。
平面折展机构平面弹簧的设计与分析刘凯;曹毅;丁锐【摘要】To avoid vibrations and abrasions caused by the rotation of a planar spring in the de-formation processes,a new planar spring was proposed based on LEMs.The planar spring with ad-vantages including a small volume,easy to fabricate,a simple structure and no revolution during the deformation,etc.might be fabricated from planar materials and might emerge out of the fabricated planar materials.Firstly, the stiffness of the planar spring was deduced based on the flexural cantilever model and the pseudo-rigid-body model respectively.In order to verify the correctness of the theoretical stiffness formulations,the ANSYS model for this planar spring was established and the FEA was compared with theoretical results calculated by the flexural cantilever model and the pseudo-rigid-body model,respectively.The results indicate that the formula derived from model of cantilever leads to the calculation with higher accuracy when the deformation is small.In contrary,the formula derived from pseudo-rigid-body model applying to large deformation is better.Finally,the applicable ranges for the two above mentioned models were analyzed separately and a numerical example was given to demonstrate their correctness.%针对常规平面弹簧变形过程中运动端容易产生周向旋转从而造成振动和磨损的问题,设计了一种基于LEMs的平面弹簧,该弹簧由平面薄板加工成形且能实现平面外运动,具有体积小、易加工,结构简单及变形过程中运动端不发生周向旋转等优点。
具有提升功能的新型柔性铰链设计邱丽芳;陈明坤;冷迎春;王晶琳【摘要】针对目前具有提升功能的柔性铰链设计较少的情况,设计了一种新型提升平板折展柔性铰链(the lifting lamina emergent joint,L-LEJ),给出了其三维结构,采用伪刚体模型法推导了该提升铰链的拉伸等效刚度计算公式.通过对设计实例进行有限元仿真分析,并与应用公式计算得到的拉伸等效刚度理论值进行对比,得到拉伸刚度的理论值与仿真值基本一致,误差在5%以内,验证了拉伸等效刚度计算公式的正确性.最后,通过9组不同结构参数设计实例的理论计算和仿真分析,进一步验证了该拉伸等效刚度计算公式的有效性.【期刊名称】《哈尔滨工程大学学报》【年(卷),期】2018(039)008【总页数】6页(P1389-1394)【关键词】提升功能;柔性铰链;拉伸等效刚度;结构设计;仿真分析;平板折展机构【作者】邱丽芳;陈明坤;冷迎春;王晶琳【作者单位】北京科技大学机械工程学院,北京100083;北京科技大学机械工程学院,北京100083;北京科技大学机械工程学院,北京100083;北京科技大学机械工程学院,北京100083【正文语种】中文【中图分类】TH122折纸艺术与变胞机构结合,用同一薄片材料制成的、可在制造平面之外运动的一种新的柔性机构类型,被HOWELL定义为平板折展机构(Lamina emergent mechanisms, LEMs)[1]。
它既可以实现如四杆机构、滑块机构等简单的运动,还能实现如球面四杆机构、Sarrus 机构等复杂的运动[2]。
柔性铰链是保证LEMs功能实现的最关键因素,因此它的设计是非常重要的。
柔性铰链具有结构简单、运动平稳、无需润滑、无回退空程、无摩擦、无间隙、无噪声、无磨损、空间尺寸小、高精度等优点[3],而作为柔性铰链的一个重要分支,平板折展柔性铰链(Lamina emergent joint,LEJ)还同时具备了基于单层平面材料制造的特点。
S形折叠式柔性铰链结构设计闫凯;张静;寇子明【摘要】According to principles of flexure hinge series and parallel relationship,a S-type fold-able flexible hinge was designed in order to reduce flexibility and get a larger corner of the flexible ing pseudo rigid-body method and energy method,the stiffness model of S-type flexure hinges was deduced.By ANSYS,a finite element model of the flexible hinges was built,and the stiffness and stress analyses of the S-type hinges were carried out.It is found that the stiffness of errors are about 3% by comparing the simulation values and theoretical values.As a result,the stiffness model of S-type flexure hinges is proved right.When the rotational degrees about the flexure hinge are up to ±35°,the safety of factor is as 4.So the S-type foldable flexible hinges fully meet the design requirements.%为了减小柔性铰链的转动刚度,依据串并联关系,设计了S形折叠式柔性铰链.使用伪刚体法和能量法,建立了S形柔性铰链的刚度模型.利用ANSYS 建立了该柔性铰链的有限元模型,对铰链进行了刚度和应力分析,并将其与理论值进行了比较,得到刚度误差约为3%,验证了刚度模型的准确性.当转角达到最大值±35°时,安全系数为4,符合设计要求.【期刊名称】《中国机械工程》【年(卷),期】2017(028)014【总页数】5页(P1696-1700)【关键词】柔性铰链;伪刚体法;能量法;等效刚度;有限元分析【作者】闫凯;张静;寇子明【作者单位】太原理工大学机械工程学院,太原,030024;太原理工大学山西省矿山流体控制工程实验室,太原,030024;太原理工大学矿山流体控制国家地方联合工程实验室,太原,030024;太原理工大学机械工程学院,太原,030024;太原理工大学山西省矿山流体控制工程实验室,太原,030024;太原理工大学矿山流体控制国家地方联合工程实验室,太原,030024;太原理工大学机械工程学院,太原,030024;太原理工大学山西省矿山流体控制工程实验室,太原,030024;太原理工大学矿山流体控制国家地方联合工程实验室,太原,030024【正文语种】中文【中图分类】TH122柔性铰链是一种特殊的柔性单元[1-3],具有整体化加工、无摩擦、免润滑等特点,主要用于要求较高的精密仪器、仿生机器人、航空航天等领域[4]。
Y型柔性铰链的设计与实验
余跃庆;李清清
【期刊名称】《光学精密工程》
【年(卷),期】2017(025)002
【摘要】为设计一种高精度、结构简单的大变形柔性铰链,提高并联平台的运动精度和零件使用寿命,本文提出了一种Y型柔性铰链.首先,借助ANSYS和ADAMS进行柔性铰链的回转中心、安装方式和行程要求的分析研究.接着,利用数控机床进行柔性铰链的加工制作.然后,利用光学坐标测量仪OPTOTRAK进行柔性铰链的轴漂测量实验.最后,进行了转动副并联平台、单片簧柔性铰链并联平台和Y型柔性铰链并联平台的圆轨迹实验.实验结果表明:Y型柔性铰链回转误差最大值为
0.5962mm,Y型柔性铰链并联平台圆轨迹的误差最大值比转动副并联平台减小了42.7%.Y型柔性铰链可以很好地替换并联平台中的转动副,提高并联平台运动精度.【总页数】7页(P394-400)
【作者】余跃庆;李清清
【作者单位】北京工业大学机电学院,北京100124;北京工业大学机电学院,北京100124
【正文语种】中文
【中图分类】TH132.3
【相关文献】
1.利用Y型管或Y型试管的微型实验 [J], 向直三
2.剪切型阻尼U型柔性铰链设计与实验分析 [J], 陈桂生;张宪民;陈忠
3.用于大载荷主动振动控制平台的柔性铰链设计和实验研究 [J], 高艳蕾;李琳
4.Y型沸石分子筛的水热法制备及表征——综合性研究型实验设计 [J], 胡涛;孟长功;王春艳;刘瑞斌;杨金辉;沙广艳
5.基于叠加柔性铰链的超磁致伸缩驱动器建模与实验 [J], 周景涛; 何忠波; 柏果; 刘国平
因版权原因,仅展示原文概要,查看原文内容请购买。
柔性铰链四杆机构变形分析及仿真吴卓;刘青【期刊名称】《科学技术与工程》【年(卷),期】2011(011)001【摘要】柔性铰链四杆机构在精密机械中的应用日益广泛.采用伪刚体模型法对具有集中柔度的全柔性铰链四杆机构进行了分析,得出了外载荷与转角的一般计算公式.给出了计算实例,并与有限元软件ANSYS仿真结果进行了对比,误差在3%左右,验证了该分析方法的有效性.最后也得出了外载荷与危险点应力成正比的关系.%Four-bar flexure hinge mechanisms are used widely in the precise machine day by day. A four-bar flexure hinge mechanism with pseudo-rigid-body model is analyzed in this paper, the relationship between loads and the angular deflection is obtained. An example is given, and contrasted with the simulation results of the ANSYS finite elelent software, the error is about 3%, so it proves the validity of the anlysis. Finally, the proportional relationship between loads and the stress of the danger point is also educed.【总页数】3页(P163-165)【作者】吴卓;刘青【作者单位】兰州理工大学机电工程学院,兰州,730050;兰州理工大学机电工程学院,兰州,730050【正文语种】中文【中图分类】TH122【相关文献】1.直角切口柔性铰链平行四杆机构的屈曲分析 [J], 宗光华;余志伟;毕树生;于靖军2.直角柔性铰链单平行四杆机构输出位移分析 [J], 杨雪锋;李威;王禹桥;叶果;苏秀平3.大变形柔性铰链的静刚度分析及应用 [J], 贾明;毕树生;于靖军;徐一村4.直圆型柔性铰链机构变形量计算与仿真分析 [J], 彭杰;杨小光;尚守锋5.直圆型柔性铰链机构变形量计算与仿真分析 [J], 彭杰;杨小光;尚守锋;;;因版权原因,仅展示原文概要,查看原文内容请购买。
2.2柔性铰链的分类与分析柔性铰链是利用材料的变形产生位移的一种特殊运动副,用于提供绕轴作复杂运动的有限角位移,具有无机械摩擦、无间隙、易维护、分辨率高和可一体化加工等优点。
柔性铰链有很多种结构,最普通的形式是绕一个轴弹性弯曲,而且这种弹性变形是可逆的。
[现代精密机械设计],如图2.1所示。
图2.1 柔性铰链结构简图Fig.2.1Diagram of flexure hinge2.2.1柔性铰链的分类及编号自20世纪60年代以来,国内外学者、科研院校及研究机构对柔性铰链进行了多方面的研究,包括理论计算、结构创新设计及应用等方面。
按目前国内外的发展研究状况,柔性铰链按其切口形状可分为单边的和双边的,按其截面曲线分为单一的和混合的;按运动副分可分为转动副、移动副和球副,按其传递运动和能量的方向分单轴柔性铰链、双轴柔性铰链、万向柔性铰链和柔性联杆。
按照横截面的不同形状,可以分为:矩形截面柔性铰链和圆形截面柔性铰链。
按研究出现的先后顺序可分为传统的柔性铰链和典型的大变形柔性铰链。
还有其他特殊类型的如弓形柔性铰链、三角形柔性铰链、叶状形的柔性铰链、簧片式的柔性铰链等等。
根据以上的分析可将柔性铰链分成以下三大类,如表2-1,2-2,2-3所示。
表2-1基本曲线规则截面单轴柔性铰链(Single-Axis Flexure Hinges)铰链名称铰链模型分类编号单轴对称直梁型(Constant RectangularCross-Section Flexure Hinge)S-R 直圆型(Circular Flexure Hinge)S-C椭圆型(EllipticalFlexure Hinge)浅切口椭圆S-E1深切口椭圆S-E2双曲线型(Hyperbolic Flexure Hinge)S-H 抛物线型(Parabolic Flexure Hinge)S-P反转抛物线(Inverse Parabolic FlexureHinge)S-Ip 正割型(Secant Flexure Hinge)S-S双曲余弦型(hyperbolic cosine FlexureHinge)S-H 弓型(arched Flexure Hinge)S-A V型(V Flexure Hinge)S-V 摆线型(cycloidal Flexure Hinge)S-Cy单轴不对称椭圆型(Elliptical Flexure Hinge)s-E1抛物线型(Parabolic Flexure Hinge)s-P双曲线型(hyperbolic cosine FlexureHinge)s-Hc 导角型(Corner-Filleted Flexure Hinge)s-CB混合型s-CCB表2-2由基本柔性铰链混合而成的单轴铰链模型(Single-Axis Flexure Hinges)组合方式产生对象铰链模型分类编号直梁-直梁混合型两个混合交错铰链(CrossFlexureHinge)类型一S-BB1类型二S-BB2车轮铰链(cartwheelflexuralhinges)S-BB3类型三S-BB4一二混合交错叶片混合(cross-axis flexuralpivot)S-BB5直梁-直圆混合型导角型(Corner-FilletedFlexure Hinge)S-CB直圆-导角混合型S-CCB直圆-椭圆混合型S-CE1表2-3双轴柔性铰链(Two-Axis Flexure Hinges)铰链名称铰链模型分类编号双轴柔性铰链串联-非同位配置(non-collocated(serially-disposed)notches)两轴垂直T-CE1-NC-V两轴平行T-E1E1-NC-P并联-同位配置(collocatednotches)两轴垂直T-CC-C -V两轴平行T-BB-C-P例子双轴椭圆铰链T-E1E1-V表2-4多轴柔性铰链(Multiple-Axis Flexure Hinges)铰链名称铰链模型分类编号圆柱型(cylindrical)M-Cyl导角型(Corner-FilletedFlexure Hinge)M-CB直圆型(Circular FlexureHinge)M-C椭圆型(Elliptical FlexureM-EHinge)抛物线型(ParabolicM-P Flexure Hinge)双曲线型(HyperbolicM-H Flexure Hinge)编号规则:1、大写代表单轴对称,即双边切口,小写代表单轴不对称,即单边切口。