关节臂式测量
- 格式:ppt
- 大小:3.79 MB
- 文档页数:42

关节臂式坐标测量机参数标定方法王学影;王华;陆艺;张培培【摘要】采用对称点法对关节臂式坐标测量机的各参数进行标定.该标定方法把各参数分离,使标定过程更简单.首先,在D-H参数建模法的基础上,利用基于准球坐标系的建模方法,建立了关节臂式坐标测量机的数学模型,使关节间各个参数正交,进而推导了运动学方程.借助设计的固紧装置,在ROMER Infinite 2.0型关节臂式坐标测量机上运用该方法进行了标定实验,得出了坐标测量机的结构参数,验证了参数标定方法的可行性和实验结果的准确性,为进一步提高关节臂式坐标测量机的测量精度奠定了基础.【期刊名称】《农业机械学报》【年(卷),期】2016(047)006【总页数】5页(P408-412)【关键词】关节臂式坐标测量机;参数标定;对称点法【作者】王学影;王华;陆艺;张培培【作者单位】中国计量大学计量测试工程学院,杭州310018;中国计量大学计量测试工程学院,杭州310018;中国计量大学计量测试工程学院,杭州310018;中国计量大学计量测试工程学院,杭州310018【正文语种】中文【中图分类】TH721关节臂式坐标测量机作为—种便携的测量仪器在工业生产中的应用越来越广泛[1-2]。
关节臂式坐标测量机参数的标定,直接影响着测量精度,从而影响到整个工业的生产过程[3-5]。
目前国外对关节臂式坐标测量机在参数标定方面的研究较多且深入。
KOVAC等[6]设计了—种专用量具结合商业化软件对关节臂式坐标测量机进行标定;FURUTANI等[7]利用装有多个标准球的金属板对关节臂式坐标测量机进行标定;SANTOLARIA等[8]使用拥有14个球的球形量规,建立基于傅里叶多项式的误差模型对关节臂式坐标测量机的参数误差进行了估计辨识;ACERO等[9]利用激光跟踪仪进行实验。
国内对参数标定这方面的研究相对较少。
主要方法有根据高精度正交三坐标测量机提供的标准,运用最小二乘参数辨识法对关节臂式坐标测量机进行标定[10];使用单点锥窝,运用模拟退火算法实现关节臂式坐标测量机的参数辨识[11];基于遗传算法对关节臂式坐标测量机的标定[12]。
关节臂坐标机示值校准不确定度分析作者:石韡蒋加平徐光洁来源:《中国新技术新产品》2019年第18期摘 ;要:JJF 1408—2013《关节臂式坐标测量机校准规范》仅给出了用标准球杆校准关节臂坐标机空间长度示值误差的方法。
该文将提出用3等量块校准关节臂坐标机空间长度示值误差的方法,并分析其不确定度,确定该方法的有效性。
确定此方法在校准实验室应用的科学性和可行性。
对于测量范围较小的关节臂测量机的空间尺寸的校准,使用量块进行校准尤为经济可行。
关键词:关节臂;量块;校准;方法;不确定度中图分类号:TB921 ; ; ; ; ; ; 文献标志码:A关节臂式坐标测量机也称便携式三维测量臂、曲臂式坐标测量机。
由于其便携性,广泛应用于汽车零配件、模具、钣金件、塑料制品、汽车整车等现场测量和检测。
作为测量器具,其示值校准显得尤为重要。
JJF 1408—2013颁布之前,部分校准机构就参照JJF 1064—2010《坐标测量机校准规范》用量块对关节臂测量机的空间尺寸示值进行校准。
JJF 1408—2013颁布之后,采用标准球杆对其空间尺寸示值进行校准的方法受到各校準机构的普遍重视。
但是由于标准球杆的制造工艺不成熟,国产厂家少,购置费用较高,很难得到普遍采用和推广。
1 测量任务及目标不确定度1.1 测量任务用900 mm三等量块校准测量臂空间测量直径1.2 mm,空间长度最大允许误差±0.025 mm 的关节臂坐标机的空间长度示值误差,并给出扩展不确定度。
1.2 测量任务目标不确定度U2 测量方法选用2块量块,短量块的长度为关节臂测量半径的50%~70%,长量块的长度为关节臂测量半径的120%~150%。
量块的摆放姿态为水平、垂直及45°。
每一个位置独立重复测量3次,同时用温度传感器对量块的温度进行实时测量,并计算量块的线膨胀值。
仪器测得值减去量块证书实测值和线膨胀值之和为示值误差,取3次测量结果中示值误差最大值为校准结果。
EuropeWetzlar, GermanyLudwigsburg, GermanyRenens, SwitzerlandRolle, SwitzerlandParis, FranceLyon, France Milano, Italy Torino, Italy Swindon, UK Telford, UK Vilnius, Lithuania Barcelona, Spain Jårfålla,Sweden ASIABeijing, China Chengdu,China Guangzhou, ChinaNingbo,China Nanjing,China Qingdao, China Shanghai, ChinaShenyang,China Shenzhen,China Wuhan,China Xi'an,ChinaHong Kong, China Ebina-shi, Japan Korea Singapore Thailand DISTRIBUTORS PRECISION CENTERSFACTORIESAMERICAS North Kingstown, Rhode Island Wixom, Michigan Chicago, Illinois Nashville, Tennessee Cincinnati, Ohio Irvine, California Charlotte, North California Monterrey, Mexico Såo Paulo, Brazil Asia PacificEbina-shi, JapanT el: 46 236 0095 Fax: 46 236 0093Hexagon Metrology Asia Pacific Pte Ltd 6 Clementi Loop (off Clementi Ave 6)Singapore 129814T el: 65 6463 6242 Fax: 65 6463 8030Hexagon Metrology Korea Ltd.Seongman, Gyconggi-do, Korea Tel.: +82 (0) 31 777 3477Fax: +82 (0) 31 777 3478 206Hexagon Measurement T echnologies Thailand 119/3 Moo 8, Bangna-Trad Road,Bangna, Bangna, Bangkok 10260, Thailand Tel: +66-2-361 3905-8北京销售服务中心:北京市朝阳区东三环中路 39 号建外 SOHO B 座写字楼 1908 室T el: 010 5869 1840 Fax: 010 5869 1841成都销售服务中心:成都市锦江区总府路 2-4 号时代广场 B 栋 1102AT el: 028 8671 6718 Fax: 028 8671 6730广州销售服务中心:广州市天河区林和西路 9 号耀中广场 B 座2415 室T el: 020 3810 7978 Fax: 020 3810 7979宁波销售服务中心:宁波市江东区彩虹北路 48 号波特曼大厦 2604 室T el: 0574 8737 6262 Fax: 0574 8733 5159南京销售服务中心:南京市中山东路 300 号长发中心 1 幢 11 楼 A 座T el: 025 8698 8800 Fax: 025 8698 8801青岛销售服务中心:青岛市株洲路 188 号T el: 0532 8089 5188 Fax: 0532 8870 3060上海销售服务中心:上海市天目西路 547 号联通国际大厦 2601 室T el: 021 6353 1000 Fax: 021 6353 5159沈阳销售服务中心:沈阳市和平区南京北街 109 号和泰运恒国际 A 座 705 室T el: 024 2334 1690 Fax: 024 2334 1685深圳销售服务中心:深圳市南山区高新技术产业中区 M-8 栋首层西座T el: 0755 8602 8088 Fax: 0755 8602 7270苏州销售服务中心:苏州市工业园区旺墩路 188 号建屋大厦 1007 室T el: 0512 6280 0880 Fax: 0512 6280 0990武汉销售服务中心:武汉市东湖新技术开发区华工园二路 1 号T el: 027 8544 8200/8266 Fax: 027 8544 9449西安销售服务中心:西安市高新四路 1 号高科广场 A709 室T el: 029 8836 1018 Fax: 029 8836 1019Affiliated Precision Centers塑造测量的未来HEXAGON 集团公司坐标测量机包括对硬件、软件 12 个月的保修期。
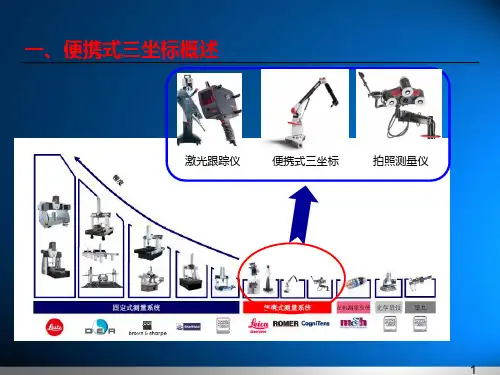
关节臂式三坐标应用关节臂式三坐标是一种常用的测量装置,可用于对物体的三维空间位置和形状进行精确测量和分析。
它由测量臂、关节、测量头和软件控制系统等组成,广泛应用于工业生产、制造业、质量控制和科学研究等领域。
本文将探讨关节臂式三坐标的应用以及其在不同领域的优势和发展前景。
一、工业制造领域1. 质量检测与控制:关节臂式三坐标可以测量工件的尺寸、形状和位置,用于检测制造过程中的质量问题,并进行实时监控和控制,提高产品的一致性和稳定性。
通过与CAD软件的配合,可以进行三维比对分析,及时发现和修复制造偏差,提高产品的质量和精度。
2. 零件加工与装配:关节臂式三坐标可以测量零件的孔距、孔径、轴线位置等重要参数,用于零件的加工和装配。
它可以通过与数控机床的连接,实现自动化测量和加工,在提高生产效率的同时,保证产品的精度和质量。
3. 逆向工程:关节臂式三坐标可以将复杂的物体进行快速而准确的扫描和重建,用于逆向工程的三维建模和分析。
它可以将实物对象转化为数字模型,可应用于产品设计、原型制作和产品改进等领域。
二、医疗领域1. 骨科测量与手术规划:关节臂式三坐标可以测量和分析骨骼结构,用于骨科医生进行手术规划和操作导航。
通过测量患者的骨骼数据,医生可以更准确地制定手术方案,提高手术的成功率和患者的康复效果。
2. 矫形器设计与定制:关节臂式三坐标可以测量和分析患者的身体形态和尺寸,用于矫形器的设计和个性化定制。
通过精确测量患者的身体数据,可以制造适合患者个体差异的矫形器,提供更好的矫治效果。
三、科研领域1. 材料分析与性能测试:关节臂式三坐标可以测量材料的形状、尺寸和表面特征,用于材料的分析和性能测试。
通过测量材料的三维数据,可以评估材料的质量和性能,为科学家提供有力的数据支持。
2. 错误分析与优化设计:关节臂式三坐标可以对产品或实验结果进行测量和分析,用于错误分析和优化设计。
通过与CAD软件的配合,可以对实验数据和模型进行比对和分析,及时发现和纠正错误,提高实验结果的准确性和可靠性。
第30卷第6期2009年11月计量学报A C T A M E TR O LO G I C A SI N IC AV01.30,N o6N o ve m b e r,2009doi:10.3969/j.i ssn.1000-1158.2009.06.05关节臂式坐标测量机数据采集系统的关键点设计凌清平,刘书桂,王学影,张国雄(天津大学精密测试技术及仪器国家重点实验室,天津300072)摘要:对关节臂式坐标测量机数据采集系统的几个关键点进行了分析设计,其中包括数据同步锁存、对径读数、坐标实时显示。
通过可编程逻辑器件(C PLD)与单片机的结合,完成了光栅信号的滤波、4细分、辨向及可逆计数等功能。
实验证明,该设计能够准确完成测量机的数据采集。
关键词:计量学;坐标测量机;关节臂;非正交坐标系统;同步锁存;对径读数中图分类号:T B92文献标识码:A文章编号:11300—1158(2009)06-0505-04K ey Poi nt s D esi gn of A r t i cul at e d A r m-C m m D at a A cqui si t i on Syst e mL I N G Q i ng—pi ng,L I U Shu—gI l i,W A N G X u e—y i ng,Z H A N G G uo—xi ong (St at e K ey L ab or at o r y of Pr eci s i o n M e弱uri ng T e chnol ogy a nd I nst r u m ent s,Ti anj i n U ni ver si t y,Ti anji n300072,C hi na)A bst r a ct:S ever al ke y point s of ar t i cul at eda皿一CH i l l i dat a acqui s i t i o n sy st e m ana l yz ed a nd d船i gned,i ncl udi ng da t a sync hr onous l a t ch es,p ai r-m d i u8r e adi ngs,and coor di nat es r ea l·t i m e di spl a y.T he com bi nat i on of C PLD a nd A V R m i cr o cm nt r ol l e r com pl et es t he f unct i on s of gr at i ng si gI la l f al t er i ng,4subdi vi ded,di s cer ni ng di r ect i on and r ever si bl e count i ng,a nd on.A c cor di ng t Ot he e xper i m ent,t he dat a col l ect i on of t he m ac hi ne be co m p l el e accur at el y.K e y w ords:M et rol ngy;Coordi nat e m easu r i I l g m achi ne(C M M);A r t i cul at ed ar m;N on-or t hogonal coo r di na t e s ys tem;Synchr onous l a t ch;P ai r-r a di u s陀a di ng1引言关节臂式坐标测量机是一种典型的非正交坐标测量机,它仿照人体手臂的关节结构,将3个杆件和一个测头通过5个旋转关节串联起来。
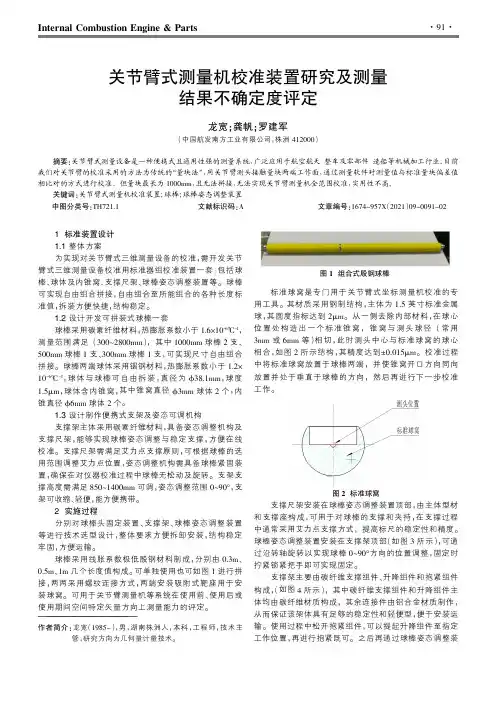
图1组合式殷钢球棒标准球窝是专门用于关节臂式坐标测量机校准的专用工具。
其材质采用钢制结构,主体为1.5英寸标准金属球,其圆度指标达到2μm。
从一侧去除内部材料,在球心位置处构造出一个标准锥窝,锥窝与测头球径(常用3mm或6mm等)相切,此时测头中心与标准球窝的球心相合,如图2所示结构,其精度达到±0.015μm。
校准过程中将标准球窝放置于球棒两端,并使锥窝开口方向同向图2标准球窝支撑尺架安装在球棒姿态调整装置顶部,由主体型材和支撑座构成,可用于对球棒的支撑和夹持,在支撑过程中通常采用艾力点支撑方式,提高标尺的稳定性和精度。
球棒姿态调整装置安装在支撑架顶部(如图3所示)过沿转轴旋转以实现球棒0~90°方向的位置调整,拧紧锁紧把手即可实现固定。
支撑架主要由碳纤维支撑组件、升降组件和抱紧组件如图4所示),其中碳纤维支撑组件和升降组件主体均由碳纤维材质构成,其余连接件由铝合金材质制作,从而保证该架体具有足够的稳定性和轻便型,便于安装运输。
使用过程中松开抱紧组件,可以提起升降组件至指定工作位置,再进行抱紧既可。
之后再通过球棒姿态调整装置调整角度,进行测试。
图4激光对中仪校准装置效果图球窝球棒支撑尺架球棒姿态调整装置支撑架3关节臂示值误差测量结果不确定度分析根据JJF1408-2013规范要求,选用两个标准球棒,短球棒长度L 1=(50~70%)R ,长球棒长度L 2=(120~150%)R 。
对关节臂式坐标测量机在不同的摆放位置下测出球棒的实测长度L i ,每一位置独立重复测量3次,取每个位置的长度测量值L i 与标准球棒中心长度值L cal 之差的最大值作为空间长度示值误差校准结果。
3.1测量重复性引入的不确定度在同一条件下,对关节臂式坐标测量机示值误差进行6次连续测量,得到一个测量列(1050.687,1050.681,1050.685,1050.693,1050.682,1050.688),则重复测量引入的标准偏差为:≈4.4μm 测量中取3次测量的平均值作为测量结果,u 1=S (x )/3√≈2.5μm3.2标准球棒引入的不确定度分量根据溯源的校准证书可以得到,,服从正态分布,取k=2 3.4标准球棒的线胀系数测量误差引入的不确定度标准球棒的材质为殷纲(4J36)材质,3.5合成标准不确定度评估由于各标准不确定度分量互不相关,合成标准不确定度为:3.6扩展不确定度评估取包含概率p=95%,k=2则:3.7不确定度评定主体旋转机构转轴锁紧把手图3球棒姿态调整装置。
关节臂式。
关节臂式测量机具有特别好的敏捷性,适合携带到现场进行测量,对环境条件要求比较低。
活动桥式测量机为例,主要组成及功能:工作台(一般采纳花岗石),用于摆放零件支撑桥架;工作台放置零件时,一般要依据零件的形态和检测要求,选择适合的夹具或支撑。
要求零件固定要牢靠,不使零件受外力变形或其位置发生变化。
大零件可在工作台上垫等高块,小零件可以放在固定在工作台上的方箱上固定后测量。
桥架,支撑 Z 滑架,形成相互垂直的三轴;桥架是测量机的重要组成部分,由主, 附腿和横梁, 滑架等组成。
桥架的驱动部分和光栅基本都在主腿一侧,附腿主要起协助支撑的作用。
由于这个缘由,一般桥式测量机的横梁长度不超过2.5 米,超过这个长度就要运用双光栅等措施对附腿滞后的误差进行补偿,或采纳其他机构形式。
滑架,使横梁及有平衡装置的 Z 轴连接;滑架连接横梁和 Z 轴,其上有两轴的全部气浮块和光栅的读数头, 分气座。
气浮块和读数头的调整比较困难,直接影响测量机精度,不允许调整。
导轨,具有精度要求的运动导向轨道,是基准;导轨是气浮块运动的轨道,是测量机的基准之一。
压缩空气中的油和水及空气中的灰尘会污染导轨,造成导轨道直线度误差变大,使测量机的系统误差增大,影响测量精度。
要保持导轨道完好,避开对导轨磕碰,定期清洁导轨。
光栅系统(光栅, 读数头, 零位片),是基准;光栅系统是测量机的测长基准。
光栅是刻有细密等距离刻线的金属或玻璃,读数头运用光学的方法读取这些刻线计算长度。
为了便于计算由于温度变化造成光栅长度变化带来的误差,采纳光栅一端固定,另一端放开,使其自由伸缩。
另外在光栅尺座预置有温度传感器,便于有温度补偿功能的系统进行自动温度补偿。
零位片的作用是使测量机找到机器零点。
机器零点是机器坐标系的原点,是测量机误差补偿和测量机行程终限制的基准。
驱动系统(伺服电机, 传动带);驱动系统由直流伺服电机, 减速器, 传动带, 带轮等组成。
驱动系统的状态会影响限制系统的参数,不能随意调整。
关节臂测量机的工作原理关节臂测量机是一种用来测量关节角度的设备,它通过测量关节的运动范围和角度来评估关节的灵活性和功能。
该机器的工作原理是基于关节的生物力学原理和运动学原理。
关节臂测量机主要由测量装置、支撑装置和数据处理系统组成。
测量装置通常包括一个固定的支撑架和一个可移动的臂式装置,该装置可以根据被测关节的位置和形态进行调整。
支撑装置用于固定被测关节的部位,以确保测量的准确性和稳定性。
数据处理系统用于记录和分析测量数据,并生成相应的报告。
在进行测量时,被测者通常需要将关节放置在关节臂测量机的测量装置上,并通过调整装置的位置和角度来使关节处于最佳测量状态。
然后,测量装置会记录关节在不同运动范围内的角度,并将数据传输给数据处理系统进行处理。
关节臂测量机的工作原理基于关节运动的生物力学原理和运动学原理。
在关节运动过程中,关节由肌肉、韧带和骨骼组成,通过肌肉的收缩和韧带的牵拉来实现运动。
关节臂测量机利用测量装置记录关节在不同运动范围内的角度,可以了解关节的灵活性和功能。
关节臂测量机的工作原理还基于运动学原理。
运动学是研究物体运动的学科,关节臂测量机通过测量关节的角度和运动范围来研究关节的运动特性。
通过分析测量数据,可以评估关节的活动范围、运动轨迹和稳定性,从而为临床诊断和治疗提供依据。
关节臂测量机可以应用于多个领域,如医学、康复和运动训练。
在医学领域,关节臂测量机可以用于评估关节疾病和损伤的严重程度,指导治疗和康复计划。
在康复领域,关节臂测量机可以用于评估康复效果和指导康复训练。
在运动训练领域,关节臂测量机可以用于评估运动员的关节功能和灵活性,为训练计划提供科学依据。
关节臂测量机是一种基于关节的生物力学原理和运动学原理工作的设备,通过测量关节的运动范围和角度来评估关节的灵活性和功能。
它在医学、康复和运动训练等领域有着广泛的应用前景,为临床诊断和治疗提供了重要的工具和数据支持。
关节臂测量机的发展将进一步推动关节研究和康复领域的进步。
关节臂测量的原理和方法
关节臂测量是一种常用的测量人体关节活动范围的方法,主要用于评估关节的灵活性和功能。
其原理是通过测量关节的活动范围,来评估关节的柔韧度和活动能力。
关节臂测量的方法主要分为两种:活动性测量和被动性测量。
1. 活动性测量:被测者自己主动完成活动,用测量工具记录相应的数据。
活动性测量适用于评估被测者自身关节活动的能力。
方法:被测者根据测量要求进行相应的动作,如屈伸、旋转等。
测量师使用测量工具,如角度量表,测量被测者活动的幅度或角度。
2. 被动性测量:由测量师或他人辅助完成关节活动,并记录相应的数据。
被动性测量适用于评估被测者关节的可动范围,检测潜在的关节问题。
方法:测量师或他人对被测者的相关肢体进行诱导和运动,如手臂的活动性测量一般由测量师对被测者的手臂进行活动和测量。
总之,关节臂测量通过测量关节活动的幅度或角度来评估关节的灵活性和功能,既可以被测者自主完成,也可以由他人辅助完成。
测量工具如角度量表可以在测
量中使用,以提高测量的准确性和可重复性。