六自由度并联机器人基于外文翻译、中英对照、英汉互译讲解
- 格式:doc
- 大小:5.28 MB
- 文档页数:21
(需微要信 swan165本科毕业设计说明书学校代码: 10128 企鹅号: 1663714557 题 目:六自由度伸缩式并联机床结构设计 学生姓名: 学 院:机械学院 系 别:机械系 专 业:机械电子工程 班 级:机电10-4班 指导教师:讲师摘红字要并联系联机微床信,也可叫获取做整套并联结构机床(Parallel Structured Machine Tools)、虚拟轴机床(Virtual Axis Machine Tools),曾经被称为六条腿机床、六足虫(Hexapods)。
并联机床是近年来国内外机床研究的方向,它具有多自由度、刚度高、精度高、传动链短、制造成本低等优点。
但其也不足之处,其中位置正解复杂就是关键的一条。
6-THRT伸缩式并联机床是Stewart 机床的一种变形结构形式,它主要构成是运动和静止的两个平台上的6个关节点分别分布在同一个平面上,且构成的形状相似。
并联机床是一种气动机械,集气(液),在一个典型的机电一体化设备的控制技术,它是很容易实现“六轴联动”,在第二十一世纪将成为主要的高速数控加工设备。
本次毕业设计题目结合本院实验室现有的六自由度并联机床机构进行设计,使其能根据工艺要求进行加工。
提高学生的工程素质、创新能力、综合实践及应用能力。
此次毕业设计的主要内容是对并联机床结构设计,其内容主要包括机器人结构设计总体方案的确定,机器人机构设计的相关计算,以及滚珠丝杠螺母副、步进电机、滚动轴承、联轴器等主要零部件的计算选用,并利用CAXA软件绘制各相关零部件的零件图和总装配图,以期达到能直观看出并联机床实体机构的效果。
关键词:并联机床;步进电动机;空间变换矩阵;滚珠丝杠螺母副AbstractPMT (Parallel Machine Tools), also known as the parallel structure machine (Parallel Structured Machine Tools), Virtual Axis Machine Tool, has also been known as the six-legged machine, six-legged insects (Hexapods).Parallel machine is in recent years the domestic machine tool research hot spot, it has multiple degrees of freedom, high rigidity, high precision, short transmission chain, with low manufacturing cost.But its shortcomings, in which the forward solution of position of a complex is the key. 6-THRT telescopic type parallel machine tool is Stewart machine tools, a deformable structure form, it is the main characteristics of dynamic, static platform on the 6joints are respectively distributed on the same plane, and form the shape similarity.Parallel machine is a mechanical, pneumatic (hydraulic), control technology in one of the typical electrical and mechanical integration equipment. Parallel machine is easy to achieve "six-axis", is expected to become the 21st century, the main high-speed light CNC machining equipment. The combination of hospital laboratory construction project, located six-DOF parallel machine tool sector, so that it can be processed according to process requirements. Improve their engineering quality, innovation, comprehensive practice and application of skills.The main topics for the design of parallel machine tool design, its content includes the determination of robot design, robot design and calculation, and the ball screw pair, stepping motor, bearings, couplings, limit switch, spindle ,and other major components using CAXA software to draw the relevant parts of the parts drawings, and assembly drawings to achieve the parallel machine tool can directly see the effect of physical bodies.Keywords: parallel machine;Six axis linkage;space transformation matrix;ball screw pair目录第一章绪论 (1)1.1 课题的研究背景 (1)1.2 课题研究的意义 (2)1.3 课题的研究内容步骤 (2)1.3.1并联机构介绍 (3)1.3.2并联机床设计类型的选定 (3)1.3.3 并联机床结构设计的相关计算 (4)1.3.4 各零部件与装配图的设计出图 (4)第二章并联机床部件设计与计算 (6)2.1 6-THRT 伸缩式并联机床位置逆解计算与分析 (6)2.1.1 6-THRT并联机器人机械结构简介 (7)2.1.2坐标系的建立 (7)2.1.3 初始条件的确立 (8)2.1.4 空间变换矩阵的求解 (9)2.1.5 新坐标及各轴滑块移动量的计算 (10)2.2 滚珠丝杠螺母副的计算与选型 (12)2.2.1 最大工作载荷的计算 (12)2.2.2 最大动载荷的计算 (13)2.2.3 规格型号的初选 (13)2.2.4 传动效率的计算 (13)2.2.5 刚度的验算 (14)2.2.6 稳定性的校验 (15)2.3 滚动轴承的选用 (15)2.3.1 基本额定载荷 (15)2.3.2 滚动轴承的选择 (16)2.3.3 轴承的校核 (16)2.4 步进电动机的计算与选型 (17)2.4.1 步进电机转轴上总转动惯量的计算 (17)2.4.2 步进电机转轴上等效负载转矩的计算 (18)2.4.3 步进电动机尺寸 (21)2.5 联轴器的选用 (21)第三章并联机床的结构设计 (23)3.1 机床中的并联机构 (23)3.1.1概念设计 (23)3.1.2运动学设计 (23)3.2杆件的配置 (23)3.2.1 杆件设计 (24)3.2.2 伸缩套筒 (25)3.3铰链的设计(虎克铰) (25)3.4机床框架和床身的设计 (26)第四章并联机床的装配出图 (28)4.1 Pro/E软件的概述 (28)4.2 Pro/E的功能 (28)4.3 CAXA电子图版简介 (28)4.4 二维图的绘制处理 (29)第五章并联机床面临的主要技术问题及前景 (30)5.1 引言 (30)5.2机床的关节运动精度问题 (30)5.3 并联机床的未来展望 (31)结论 (32)参考文献 (33)谢辞 (34)第一章绪论1.1 课题的研究背景为了改善生产环境的适应性,满足快速变化的市场需求,近年来制造设备和系统,全球机床制造业正在积极探索和开发新的功能,其中在机床结构技术上的突破性进展当属90年代中期问世的并联机床(Parallel Machine Tools),又称虚(拟)轴机床(Virtual Axis Machine Tool)或并联运动学机器(Parallel Kinematics Machine)[12]。

超精密机床即采用六足型测量装置测量刀具之间探头和工件在六个方位自由度的相对运动Oiwa t .静冈县大学Hamamatsu、日本摘要本文介绍了精密机械系统对于刀具和工件之间的运动误差的六个方位的自由度(6自由度)的补偿。
六足式并联机构的主轴与刀具之间的表面板安装由传统的机器被动驱动。
并联机构机床在六自由度的运动与温度波动和外部因素有关,由于有一个外部力量的补偿系统和有关联的热误差。
因此,通过测量6个自由度误差来决定工具的位置和方向的补偿。
本文介绍了概念和基础的系统。
此外,还顺便扩展介绍了支撑与补偿装置在联合测试中的错误。
关键词:并联运动学,精密机械系统,数控机床,三坐标测量机。
1、导言近年来,在高精密制造机械工业中,加速了对纳米级定位分辨率以及定位精度小于100纳米的高精密机床的需求。
例如,半导体产业。
为了实现这样的超精密机床或坐标测量机。
这种机床能在刀具/触摸探头和工件之间生成高度精确的相对运动,这样就需要提高每个元素的准确度来提高机床整体的精密度。
在实际的机床中仍然有外部和内部因素的干扰。
如图1所示明显的定位误差。
因此,要求各机械元件运动精度,结构和热稳定性。
在整个机器上强烈要求确保刀具和工件之间相对运动的准确性。
在一般情况下,导向元件精度明显改善了结构刚度,以减少运动误差和弹性变形引起的外部和内部的驱动力[1],[2]然而,随着增加了动态误差造成进一步的弹性变形,由于存在着惯性力和摩擦力,没有任何机械结构有无限的稳定性。
另一方面作为热变形机器结构的补偿措施,许多研究人员进行了方法研究,用有限的数字温度传感器和热变形的分析。
[3] [4]然而,热变形是很难准确预测,是因为传感器不能测量所有机器的温度元素。
此外,房间的温度波动和热变形造成支撑梁(例如,一个正交滑块机构)很难的预测。
本文介绍的机器系统是工具和工件之间在六个方位的自由度(六自由度)的运动误差反馈传感器系统。
为了测量在六自由度的相对运动,一个六足式并联机制(并联机床)由一个基地平台固定在机器的表面板,一个移动的平台固定在机床主轴,和六个可扩展支柱的线性刻度单位。
“六自由度”资料汇整目录一、六自由度机器人结构设计、运动学分析及仿真二、基于Stewart结构的六自由度并联稳定平台技术研究三、模拟器中车辆动力学与六自由度平台联合仿真技术研究四、六自由度破碎机运动特性分析及控制研究五、六自由度并联机器人工作空间分析六、基于液压六自由度平台的空间对接半物理仿真系统研究六自由度机器人结构设计、运动学分析及仿真随着科技的不断发展,机器人已经广泛应用于工业、医疗、军事等领域。
其中,六自由度机器人作为最具灵活性的机器人之一,备受研究者的。
本文将围绕六自由度机器人结构设计、运动学分析及仿真展开讨论,旨在深入探讨六自由度机器人的性能和特点。
关键词:六自由度机器人、结构设计、运动学分析、仿真六自由度机器人具有六个独立的运动自由度,可以在空间中实现精确的位置和姿态控制。
因其具有高灵活性、高精度和高效率等优点,六自由度机器人在自动化生产线、航空航天、医疗等领域具有广泛的应用前景。
目前,国内外研究者已对六自由度机器人的设计、制造、控制等方面进行了深入研究,并取得了一系列重要成果。
六自由度机器人的结构设计主要包括关节结构设计、连杆结构设计及控制模块设计。
关节结构是机器人的重要组成部分,用于实现机器人的转动和移动。
连杆结构通过关节连接,构成机器人的整体构型,实现机器人的各种动作。
控制模块用于实现机器人的任意角度运动,包括运动学控制和动力学控制等。
在结构设计过程中,应考虑关节的负载能力、运动速度和精度等因素,同时需注重连杆结构的设计,以实现机器人的整体协调性和稳定性。
控制模块的设计也是关键之一,需结合运动学和动力学理论,实现机器人的精确控制。
运动学是研究物体运动规律的一门学科,对于六自由度机器人的运动学分析主要包括正向运动学和逆向运动学。
正向运动学是根据已知的关节角度求解机器人末端执行器的位置和姿态,而逆向运动学则是根据末端执行器的位置和姿态求解关节角度。
对六自由度机器人进行运动学仿真,有助于深入了解机器人的运动性能。
附录一:机器人的运动学分析与模拟文摘:常见的方法,比如Denavit-Hartenberg方法,不能简单地用在特殊的机器人的运动分析与混合铰链很难获得这种方法的主要参数。
因此,齐次变换理论来解决这个问题。
首先,这种特殊结构的运动学特征分析的基础上闭链理论。
在这样一个理论,闭链可以转换开连锁店,这使得它更容易分析这种结构。
因此,它将成为更容易建立运动学方程,得到解决方案。
然后,机器人模型可以建立Simmechanics与这些方程的解决方案。
有必要设计一个机器人仿真的图形用户界面。
之后,真正模型机器人和机器人将分别转移到一些空间点在同样的条件下。
最后,所有数据将验证基于运动分析对比数据从模拟和真实的机器人。
关键字:混合铰链结构,齐次变换,运动学分析,运动学仿真1 介绍通常,我们使用Denavit-Hartenberg(d - h)方法来分析机器人的运动学。
该方法的关键是建立一组d - h参数标明所有关节的坐标系的关系[1]。
有很多研究串行链工业机器人,但是很少有研究在这样的工业机器人复杂的结构。
例如,一种混合的大型通用工业机器人的铰链结构允许其在低能耗手臂向后移动。
这个机器人的运动规律不同于其他机器人和d - h参数不能确定。
提出了两个解决方案来处理这个特殊的结构。
一是将结构转换为等效连续关节(关节转动或棱镜)。
然后我们可以决定一个接一个的d - h参数基于d - h理论[2]。
另一种是将闭链开连锁店,这样我们才能计算主动和被动关节之间的关系。
然后,复杂结构转化为简单的串行结构[3]。
第一种方法需要分析每一个共同的特点在这个混合的铰链,因此它是复杂和容易出错的[4]。
同时,在第二个方法中,虽然一般理论分析介绍了所有封闭的链,分解结构不提出这个理论并不是由实验验证。
考虑这两个方法,这将是容易确定关节的坐标系之间的关系如果我们知道的运动学特征的特殊结构。
因此分析了特殊结构的运动特征基于封闭的开链理论。
然后直接坐标系统建立在每个活动关节。
六自由度并联机器人运动学正-反解研究硕士学位论文目录目录.........................................................................................I 摘要.. (I)Abstract.........................................................................................II 插图索引......................................................................................III 第1章绪论 (1)1.1 课题研究的目的和意义 (1)1.2 6-DOF并联机器人国内外发展研究现状 (1)1.2.1 6-DOF并联机器人国内外发展现状 (1)1.2.2 6-DOF并联机器人国内外研究现状 (3)1.3 交流PMSM伺服驱动技术国内外发展现状 (5)1.4 本论文主要研究内容 (6)第2章 6-DOF并联机器人运动学分析 (8)2.1 引言 (8)2.2 6-DOF并联机器人基本结构简介 (8)2.3 6-DOF并联机器人运动学反解分析 (9)2.3.1 6-DOF并联机器人运动学反解算法推导 (9)2.3.2 6-DOF并联机器人运动学反解算法Simulink实现 (10)2.4 6-DOF并联机器人运动学正解分析 (14)2.4.1 6-DOF并联机器人运动学正解算法推导 (14)2.4.2 6-DOF并联机器人运动学正解算法Simulink实现 (15)2.5 本章小结 (21)第3章 6-DOF并联机器人三维建模及运动学仿真 (22)3.1 引言 (22)3.2 6-DOF并联机器人Pro/E三维建模 (22)3.2.1 三维建模软件Pro/E使用简介 (22)3.2.2 6-DOF并联机器人Pro/E三维建模和组装 (26)3.3 6-DOF并联机器人ADAMS运动学仿真及Simulink联合仿真(31)3.3.1 机械系统仿真软件ADAMS使用简介 (31)3.3.2 6-DOF并联机器人ADAMS运动学仿真 (32)3.3.3 6-DOF并联机器人ADAMS-Simulink联合仿真 (37)3.4 本章小结 (40)第4章PMSM-SVPWM矢量控制系统研究及其Simulink实现(41)4.1 引言 (41)4.2 PMSM-SVPWM矢量控制系统基本原理 (41)六自由度并联机器人运动学正/反解研究4.2.1 永磁同步电机dq坐标系动态数学模型 (41)4.2.2 SVPWM技术基本原理 (42)4.3 PMSM-SVPWM与PMSM-SPWM矢量控制系统仿真 (44)4.3.1 SVPWM技术的算法与Simulink实现 (44)4.3.2 PMSM-SVPWM矢量控制系统仿真 (47)4.3.3 PMSM-SPWM矢量控制系统仿真 (47)4.3.4 PMSM-SVPWM与PMSM-SPWM矢量控制系统对比分析(48)4.4 本章小结 (50)总结与展望 (51)参考文献 (52)致谢 (56)附录攻读学位期间所发表的学术论文目录 (57)硕士学位论文摘要六自由度(6-degree of freedom,6-DOF)并联机器人因为其刚度高,动态性能优越,与串联机器人相比无累积位置控制误差等优点在一系列领域得到广泛应用,如并联机床,机器人操作器以及各种运动模拟等。
(Title):The Development Of 6 DOF Robot Arm Control System 题目:六自由度机器臂控制系统的开发
系 别: 电气工程系 专 业: 自动化 姓 名: 梁健伟 学 号: 2010020343159 指导教师: 陈朝大 日 期: 2014年5月 英中翻译 The Development Of 6 DOF Robot Arm Control System 六自由度机器臂控制系统的开发
Manipulator is the earliest industrial robots, but also the earliest modern robot, which can replace human labor in order to achieve the production of heavy mechanization and automation, can operate in hazardous environments to protect the personal safety , which are widely used in machinery manufacturing, metallurgy , electronics, light industry and atomic energy sectors. Robotic applications in the industry as " industrial structure and function of the early mechanical manipulators are relatively simple, professional, can only be completed with a host ancillary tasks such as crawling Work piece loading unloading , for clip knives , etc. This is called a dedicated robotic manipulator with the development of industrial technology, the emergence of the robotic arm can be independently controlled by the program , auto repeat , which has a robotic arm can quickly change the program functions , adaptability, has been widely used in the industrial production of small quantity and variety of such robotic manipulator called Universal , Universal manipulator , also known as " industrial robots " that the first generation of robots. robot on the basis of has been further developed , there has been a robot with some sensory function (eg visual, tactile , auditory ) , called second -generation robot , and later appeared with some of the thinking and language features intelligent robots , called third generation of robots. 机械臂是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。在工业中应用的机械臂称为“工业机械 早期的机械臂的结构和功能都比较简单,专业性强,仅能配合某台主机完成辅助性工作,如抓取工件、上料下料、换夹刀具等。这种机械臂称为专用机械臂。随着工业技术的发展,出现了能够独立地按控制程序、自动重复操作的机械臂,这种机械臂具有能很快地改变程序功能,适应性强,在中小批量、多品种的工业生产中得到了广泛应用。这种机械臂称为通用机械臂,通用机械臂又称为“工业机器人”,即第一代机器人。机器人在此基础上得到了进一步发展,出现了具有某些感觉功能(如视觉、触觉、听觉)的机器人,称为第二代机器人,以后又出现了具有某些思维和语言功能的智能机器人,称为第三代机器人。 Since the world's first industrial robot was born, robots in industrial countries has been developing rapidly. Applications gradually into other sectors from the automotive industry, according to the International Federation of Robotics (positive R) statistics, the world robot market prospects, starting from the second half of the 20th century, the world robotics industry has maintained a good momentum of steady growth. In the 1990s, the robot product development speed, the average annual growth rate of about 10%, 2000 growth rate rose to 15%. The main application of the robot in two ways, one is a robot work cell, the other is a production line with robots, which has become the main way in foreign robotic applications. In developed countries, the robot automated production line has formed a huge industry, the annual market capacity of about $ 100 billion. Like integrated supplier internationally renowned company ABB, COMAU, KUKA, BOSCH, NDC, SWISSLOG, Murata, etc. are robotic automated production lines and logistics and warehousing automation equipment. 自世界上第一台工业机器人诞生以来,机器人在工业发达国家得到了迅速发展。应用领域从汽车工业逐渐向其他行业渗透,据国际机器人联合会(正R)统计,世界机器人市场前景看好,从20世纪下半叶起,世界机器人产业一直保持着稳步增长的良好势头。进入90年代,机器人产品发展速度加快,年增长率平均在10%左右,2000年增长率上升到15%。机器人的应用主要有两种方式,一种是机器人工作单元,另一种是带机器人的生产线,而后者在国外已经成为机器人应用的主要方式。在发达国家,机器人自动化生产线已形成一个巨大的产业,年市场容量约为1000亿美元。像国际上著名公司ABB、COMAU、KUKA、BOSCH、NDC、SWISSLOG、村田等都是机器人自动化生产线及物流与仓储自动化设备的集成供应商。 With the development of science and technology and the world of robot technology , China has made encouraging progress in robotics research, technology development and application engineering. From the late 1980s to the 1990s , the National 863 Program the robot as an important research topic in the field of automation , robotic systems to carry out the basic science, the key technologies in automation engineering and robotics component parts , advanced robotic systems integration technology research and robotics applications. How to accelerate the development of China in the 21st Century robot that powers our early access to the robot ranks has become imperative. Since the foundation of our current number of robots is too low to industrial Robots , for example, to the 2010 ownership of the robot can only reach 1.38-2 % ownership in the world , which China, as the world's top half of the main requirements of the 21st century, the gap between the country of manufacture too , this gap can only be imported if the robot to make its huge losses in monetary losses can not be calculated. visible , whether considered from the capital, or from the long-term interests , we need to autonomously carry out research and development of robots . As the research and development of domestic and foreign robots are still a large gap , although plans to develop a robot basically a wooden base abroad mature technology , but the domestic unit to understand these technologies are still at a considerable part of the offer or local technology. Therefore, we should start from the basic , necessary to develop a small number of models to carry out a number of robots and robot -based technology research as a major topic of research and development content. Studies of the robot started late, but rapid progress , has made remarkable achievements in all aspects of industrial robots, special robots and intelligent robots, and lay the foundation for the development of a preliminary robotics . China's industrial robots After 20 years of development has been on the road of industrialization taking the pace.
六自由度工业机器人设计六自由度工业机器人是一种具有六个关节的机器人系统。
它具有在六个自由度上运动的能力,这使得它能够进行繁重和复杂的任务,比如装配、焊接、搬运和包装等。
在这篇文章中,我将介绍六自由度工业机器人的设计、特点和应用。
首先,六自由度工业机器人的设计涉及到机械结构、运动学和控制系统。
机械结构决定了机器人的形态和运动范围,可以采用串联、并联或混合结构。
运动学研究机器人的末端执行器在任务空间内的位置和姿态,这涉及到逆运动学和正运动学问题。
控制系统是整个机器人系统的大脑,负责计算和控制机器人的运动。
六自由度工业机器人的特点包括高灵活性、高精度和高负载能力。
它们可以在六个自由度上独立运动,可以实现各种复杂的姿态和路径。
同时,它们的运动精度很高,可以达到亚毫米级别,适用于精细加工和装配任务。
此外,它们通常具有高负载能力,可以携带和操作重物。
六自由度工业机器人在各行各业有广泛的应用。
例如,在汽车制造业中,机器人可以完成汽车零部件的装配和焊接;在食品加工业中,机器人可以进行瓶装和包装;在医疗领域,机器人可以辅助手术和病人护理;在仓储物流业,机器人可以搬运和分拣商品。
这些机器人系统可以提高生产效率、减少人力成本和改善工作环境。
然而,六自由度工业机器人也面临一些挑战。
首先,它们的复杂性导致了设计和制造的困难,需要专业的工程师和技术人员。
其次,它们的成本相对较高,需要考虑到投资回报和经济效益。
此外,人机交互和安全问题也需要重视,以确保机器人与人类工作人员的安全合作。
综上所述,六自由度工业机器人是一种具有六个关节和自由度的机器人系统。
它们的设计、特点和应用都具有复杂性和广泛性。
通过合理的设计和控制,六自由度工业机器人可以实现高灵活性、高精度和高负载能力,从而广泛应用于各行各业。
然而,要克服各种挑战,需要进一步的研究和开发。
外文翻译机器人The robot性质: □毕业设计□毕业论文教学院:机电工程学院系别:机械设计制造及其自动化学生学号:学生姓名:专业班级:指导教师:职称:起止日期:机器人1.机器人的作用机器人是高级整合控制论、机械电子、计算机、材料和仿生学的产物。
在工业、医学、农业、建筑业甚至军事等领域中均有重要用途。
现在,国际上对机器人的概念已经逐渐趋近一致。
一般说来,人们都可以接受这种说法,即机器人是靠自身动力和控制能力来实现各种功能的一种机器。
联合国标准化组织采纳了美国机器人协会给机器人下的定义:“一种可编程和多功能的,用来搬运材料、零件、工具的操作机;或是为了执行不同的任务而具有可改变和可编程动作的专门系统。
2.能力评价标准机器人能力的评价标准包括:智能,指感觉和感知,包括记忆、运算、比较、鉴别、判断、决策、学习和逻辑推理等;机能,指变通性、通用性或空间占有性等;物理能,指力、速度、连续运行能力、可靠性、联用性、寿命等。
因此,可以说机器人是具有生物功能的三维空间坐标机器。
3.机器人的组成机器人一般由执行机构、驱动装置、检测装置和控制系统等组成。
执行机构即机器人本体,其臂部一般采用空间开链连杆机构,其中的运动副(转动副或移动副)常称为关节,关节个数通常即为机器人的自由度数。
根据关节配置型式和运动坐标形式的不同,机器人执行机构可分为直角坐标式、圆柱坐标式、极坐标式和关节坐标式等类型。
出于拟人化的考虑,常将机器人本体的有关部位分别称为基座、腰部、臂部、腕部、手部(夹持器或末端执行器)和行走部(对于移动机器人)等。
驱动装置是驱使执行机构运动的机构,按照控制系统发出的指令信号,借助于动力元件使机器人进行动作。
它输入的是电信号,输出的是线、角位移量。
机器人使用的驱动装置主要是电力驱动装置,如步进电机、伺服电机等,此外也有采用液压、气动等驱动装置。
检测装置的作用是实时检测机器人的运动及工作情况,根据需要反馈给控制系统,与设定信息进行比较后,对执行机构进行调整,以保证机器人的动作符合预定的要求。
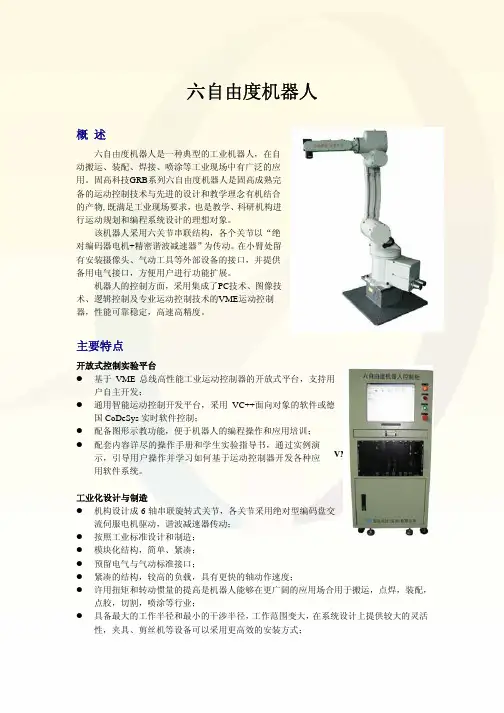
摘要在当今轮毂制造业中,企业为提高生产效率,保障产品质量,普遍重视生产过程的自动化程度,工业机器人作为自动化生产线上的重要成员,逐渐被企业所认同并采用。
工业机器人的技术水平和应用程度在一定程度上反映了一个国家工业自动化的水平,目前,工业机器人主要承担着焊接、喷涂、搬运以及堆垛等重复性并且劳动强度极大的工作,工作方式一般采取示教再现的方式。
本文设计和研究了一个六自由度的工业机器人,用于生产线的进送料和装配。
首先,本文对生产线布局进行改造设计,提高生产的工作效率,然后,根据设计要求设计了机器人的整体方案和具体的机械结构,选择了合适的传动方式、驱动方式,设计了机器人的底座、大臂、小臂和手部的结构;并且对机器人的传动结构进行设计,机器人为六自由度关节型机器人,全部采用转动关节,关节处采用电机,减速机,齿轮传动机构,蜗轮蜗杆传动机构来实现各个自由度,从而实现所需的运动。
在此基础上,本文将设计该机器人的控制系统,采用PC+DSP运动控制卡的控制方式,确定了控制系统的总体方案,设计了PCI 总线接口电路和DSP。
关键词: 六自由度工业机器人;生产线;结构设计;控制系统;各位如果需要此设计的全套内容(包括二维图纸、中英文翻译、完整版论文、程序、答辩PPT)可加QQ695939903,如果需要代做也请加上述QQ,代做免费讲解。
AbstractIn the modern large-scale manufacturing industry, enterprises pay more attention on the automation degree of the production process in order to enhance the production efficiency, and guarantee the product quality. As an important part of the automation production line, industrial robots are gradually approved and adopted by enterprises. The technique level and the application degree of industrial robots reflect the national level of the industrial automation to some extent, currently, industrial robots mainly undertake the jops of welding, spraying, transporting and stowing etc. , which are usually done repeatedly and take high work strength, and most of these robots work in playback way.In this paper ,I will design an industrial robot with six DOFs.First, I will transform line layout and design the structure of the baseto improve the work efficiency of production ,and then, according to the design requirements ,I design the robot mechanical structure of the overall plan and specific ,and chose the right means of transmission and drive mode,Then ,I design the big arm, the small arm and the end manipulator of the robot,and I design the transmission structure, This robot is a 6-DOF joint robot,These joints are all rotary joints, joints used motor, reducer, gear transmission, worm gear and worm drive mechanism to realize various degrees of freedom, so as to achieve the required movement.On this basis, this paper will design the control system of the robot, which controlled by PC and DSP motion control card, and determine the overall scheme of the control system, design DSP and PCI bus interface circuit .Keywords: 6-DOF industrial robot, line layout , structure design, the control system目录摘要 (I)Abstract.............................................................................................................. I I第1章绪论 (5)1.1 课题背景及研究的目的和意义 (5)1.2国内外在该方向的研究现状及分析 (6)1.3 本文的主要研究内容 (8)第2章生产线布局及总体方案的确定 (9)2.1 生产线布局方案 (9)2.1.1机械手 (9)2.1.2 工作流程 (10)2.1.3方案预期达到的目标 (10)2.2总体方案的设计 (11)2.2.1机构的选型 (11)2.2.2驱动方式的选择 (11)2.2.3 传动方案的选择 (12)2.2.4 总体结构方案设计 (13)2.2.5控制方案的设计 (15)2.2.6技术参数列表 (16)2.3 本章小结 (17)第3章结构的设计 (18)3.1 引言 (18)3.2 电机力矩的计算以及驱动电机的选择 (18)3.3减速器的设计 (19)3.4 腰部的设计 (20)3.5 手臂的设计 (20)3.5.1手臂的设计基本要求 (20)3.5.2大臂和小臂 (21)3.5.3连杆 (22)3.6手腕部的设计 (22)3.7末端执行器的设计 (22)3.8本章小结 (23)第4章传动系统的设计及校核 (25)4.1腰部蜗轮蜗杆设计及校核 (25)4.2 腕部传动系统设计及校核 (25)4.2.1传动方案 (25)4.2.2齿轮的设计及校核 (25)4.2.2.1齿轮组设计 (25)4.2.2.2 直齿圆锥齿轮的设计 (25)4.2.3 轴的设计 (25)4.3 本章小结 (27)第5章控制系统设计 (29)5.1 引言 (29)5.2 控制系统的设计 (29)5.2.1 控制系统的类型选择 (29)5.2.2 控制系统的硬件电路 (29)5.3 PCI的接口设计 (30)5.4 DSP的设计 (31)5.4.1 DSP概述 (31)5.4.2 DSP硬件电路 (31)5.4.3 DSP软件 (31)5.5本章小结 (32)结论 (33)参考文献 (34)致谢 (35)第1章绪论1.1 课题背景及研究的目的和意义轮毂制造业属于劳动密集型的行业,除了繁重的体力工作外,几乎每个工序都存在着对人体有害的污染源和潜在的工伤事故:热加工工序烫灼伤的危险,大量易燃易爆燃料及消耗材料时时刻刻威胁着操作手的安全;铝液除气除渣产生的有毒烟尘,机加工冷却液的有害蒸汽,以及涂装工序液体漆、粉漆、前处理药液等等都会严重影响工人的健康;无处不在的轰鸣及刺耳的噪音会使你情绪坏到极点。
本科毕业论文(设计)题目(中文)六自由度机器人运动分析及优化(英文) Motionanalysis and optimization of6-DOF robot学院信息与机电工程学院院年级专业 2013级汽车服务工程(中德) )学生姓名吴子璇正学号 130154494 7指导教师安康安完成日期 2017 年 3 月摘要当今世界,工业化日趋成熟,机器人被广泛的应用于各行各业,最常用到的有四自由度,六自由度机器人.其中,自动化水平较高的汽车制造业和电子装配业经常常常要使用到六自由度机器人。
因此对其实施运动学分析,是进行科学设计的基础,也是降低机器人生产成本,优化机器人运动轨迹的前提。
此外,运动分析过程有效的模拟了机器人运动的真实情况,有助于提供有效可行的优化方案。
本文主要探讨六自由度机器人的运动分析,基于经典运动学以及动力学的研究方法概念,首先通过solidworks做出机械臂各部分零件的三维图,然后通过SolidWorks装配出六自由度机器人机械臂的三维模型. 通过该模型,选取其中一个关节和底座,并用SolidWorks进行运动学分析,对六自由度机器人的运动学和动力学计算方法进行了仿真验证。
最后得到六自由度机器人的其中一个自由度的运动仿真实例。
通过对该运动仿真实例的分析,得出最佳优化方案,优化机器人的运动轨迹提高机器人的工作效率,降低机器人生产成本.关键词:六自由度机器人;运动分析;运动学;动力学;目录摘要 (I)Abstract ................................... 错误!未定义书签。
1 绪论 (1)1。
1 课题背景及研究的目的和意义 (1)1.2机器人国内外发展现状及前景展望-—---——-—-——-——-———-—-—-——12 六自由度机器人运动学分析 (3)2。
1六自由度机器人的结构-—--—-—-------—---———-—-——--—--——-——-12。
动态优化的一种新型高速,高精度的三自由度机械手①彭兰(兰朋)②,鲁南立,孙立宁,丁倾永(机械电子工程学院,哈尔滨理工学院,哈尔滨 150001,中国)( Robotics Institute。
Harbin Institute of Technology,Harbin 150001,P。
R。
China)摘要介绍了一种动态优化三自由度高速、高精度相结合,直接驱动臂平面并联机构和线性驱动器,它可以提高其刚度进行了动力学分析软件ADAMS仿真模拟环境中,进行仿真模拟实验.设计调查是由参数分析工具完成处理的,分析了设计变量的近似的敏感性,包括影响参数的每道光束截面和相对位置的线性驱动器上的性能.在适当的方式下,模型可以获得一个轻量级动态优化和小变形的参数。
一个平面并联机构不同截面是用来改进机械手的.结果发生明显的改进后的系统动力学仿真分析和另一个未精制一个几乎是几乎相等.但刚度的改进的质量大大降低,说明这种方法更为有效的。
关键词: 机械手、 ADAMS、优化、动力学仿真0 简介并联结构机械手(PKM)是一个很有前途的机器操作和装配的电子装置,因为他们有一些明显的优势,例如:串行机械手的高负荷承载能力,良好的动态性能和精确定位的优点等. 一种新型复合3一DOF臂的优点和串行机械手,也是并联机构为研究对象,三自由度并联机器人是少自由度并联机器人的重要类型。
三自由度并联机器人由于结构简单,控制相对容易,价格便宜等优点,具有很好的应用前景。
但由于它们比六自由度并联机器人更复杂的运动特性,增加了这类机构型综合的难度,因此对三自由度并联机器人进行型综合具有理论意义和实际价值。
本文利用螺旋理论对三自由度并联机器人进行型综合,以总结某些规律,进一步丰富型综合理论,并为新机型的选型提供理论依据,以下对其进行阐述。
如图-1所示机械手组成的平面并联机构(PPM)包括平行四边形结构和线性驱动器安装在PPM.两直接驱动电机c整合交流电高分辨率编码器的一部分作为驱动平面并联机械装置.线型致动器驱动的声音线圈发动机.这被认为是理想的驱动短行程的一部分.作为一个非换直接驱动类,音圈电机可以提供高位置敏感和完美的力量与中风的角色,高精密线性编码作为回馈部分保证在垂直方向可重复性。
基于Grassmann-Cayley代数的六自由度三足并联机器人的奇异性条件Patricia Ben-Horin,Moshe Shoham,IEEE准会员关键词:指数,Terms-Grassmann-Cayley代数,奇异性条件,六自由度三足机器人摘要本文研究了每一个腿上都有一个球形接头的大多数六自由度并联机器人的奇异性条件。
首先,应该确定致动器螺丝位于腿链中心,然后在使用基于Grassmann-Cayley代数和相关的分解方法来确定这些螺丝包含的哪些条件是导数刚度等级不足的。
这些工具是非常有用,因为他们可以方便的表示坐标-并用简单的表达式来表示几何实体,从而使用几何解释奇异性条件是更容易获得。
利用这些工具, 这类奇异性条件的144种组合被划定在四个平面所相交的一个点上。
这四个平面被定义为这个零距螺丝球形关节的位置和方向。
一、介绍在过去的二十年里,许多研究人员一直在广泛地研究并联机器人的奇异性。
不像串联机器人, 尽管并联机器人失去了在奇异配置中的自由度,而且执行器都是锁定的,但是他们的的自由度还是可以获得的。
因此,对这些不稳定姿势的机器人的全面研究对于提高机器人的设计和确定机器人的路径规划是至关重要的。
用于寻找并联机器人奇异性的主要的方法之一,是基于计算雅可比行列式进行计算。
Gosselin和安杰利斯的分类奇异性的闭环机制是通过考虑两个雅克比定义输入速度和输出速度之间的关系。
圣鲁克和Gosselin减少了定义的雅可比行列式算术操作要求,从而通过数值计算得到多项式。
另一个重要的工具,是用螺旋理论分析奇异性,在1900的论文中中开发机器人的相关应用程序,有几项研究已经应用这个理论找到并联机器人的奇异性。
在论文中,特别注意到情况是执行机构是线性和代表螺丝是零投的。
在这些情况下,奇异的配置是解决是使用几何方法寻找可能的致动器线依赖,可以发现其他分类方法闭环机制。
在本文中,我们分析了三足的机器人的一大类奇异点,机器人每个腿链有一个球形接头,我们只关注了其中正运动学奇异性。
首先,我们研究了螺丝相关执行机构的每个链,因为每一个链包含一个球形接头,自致动器螺丝是相互联合的,他们是通过球形关节的零螺距螺杆螺丝联合。
然后我们使用Grassmann-Cayley 代数和相关的发展理论获得一个代数方程,它源于管理行机器人包含的刚度矩阵。
直接和高效检索的几何奇异配置是这种方法最主要的一个优点,在这里将介绍其方法。
虽然之前的研究分析7架构普惠制,各有至少三条并发关节,本文扩展了奇点分析程度,分析了更广泛的一类具有三足和一个球形关节的机器人。
使用降低行列式和Grassmann-Cayley的运算方式我们获得了一个通用的条件,这些机器人的奇异性隐含在一个简单的几何意义方式计算中。
本文的结构如下。
第二节详细描述了运动学结构的并联机器人。
第三节包含了在一个简短的螺丝和大纲性质的背景下的驱动器螺丝、零距螺丝共同作用于中心的球形关节。
第四部分介绍用Grassmann-Cayley代数的基本工具来寻找奇异性条件。
这部分还包括刚度矩阵(或导数)分解成自由坐标表达。
第五节中一个常见的例子给出了这种方法。
最后,第六章比较了使用本方法结果与结果的其他技术。
二、运动构架本文阐述了6自由度并联机器人的六间连通性基础和移动平台。
肖海姆和罗斯提调查了可能的结构,产生基于流动公式6自由度的Grubler和Kutzbach。
他们寻找了所有的可能性,满足这个公式对关节的数目和任何链接。
包括GSP和三足机器人结构的一个子集所列出的6自由度Shoham和罗斯。
一个类似的例子也证实了Podhorodeski和Pittens,他发现了一个类的三足的对称并联机器人, 在每个腿上的球形关节、转动关节的平台都比其他结构潜在有利。
正如上面所讨论的,大多数的报告文献限制他们的分析结构和球形关节位于移动平台和棱柱关节作为驱动的关节。
在这个分类,我们机器人包括五种类型的关节和更多的可选职位的球形关节。
我们处理的机器人有三个链连接到移动平台,每个驱动有两个一自由度关节或一个二自由度关节。
这些链不一定是平等的,但都可以移动和连接六个基础和其之间的平台。
除了球形接头(S),关节考虑是棱镜(P),转动(R)、螺旋(H)、圆柱(C)和通用(U),前三个是一自由度关节,最后是两个二自由度的关节。
所有的可能性都显示在表I和II。
该列表只包含有平等连锁的机器人,总计144种不同的结构,但是机器人与任何可能的组合链也可以被认为是membersof这类方法。
组合的总数,大于500 000。
三、管理方法本节涉及螺丝和平台运动的确定。
因为考虑机器人有三个串行链,每个驱动器螺丝的方向可以由其互换到其他关节螺钉固定的链条。
被动球形接头在每个链组驱动器螺丝为零距(行)并且通过它的中心。
因此,三个平面是创建于自己中心的球形关节。
以下简要介绍了螺旋理论的广泛解决,用于我们解决在第二节中列出相互的所有关节螺钉系统。
上述类的机器人的几何结果奇点现在相比其他方法获得的结果要准确。
首先,我们比较奇异条件位于上述3个GSP平台与结果报告线几何方法。
用基于相对几何条件的方法区分不同类型的机器人沿着棱镜致动器的奇异性。
我们发现,所有这些奇异点是特定情况下的条件通过(17 c)提供,这是基于有效的三足以及6:3 GSP平台的机器人的考虑。
这种结构的奇异配置根据线几何分析得来的,包括五种类型:图-c、图4-b、图4 -d,图-5 a和图5-b。
四、奇异性分析本节确定的奇异性条件定义包括两部分。
第一部分包括寻找方向的执行机构的行动路线,是基于解释第三节中介绍的,它通过球形接头中心,而它们的方向取决于机器人关节的分布和位置。
第二部分创建应用程序的方法则是使用了Grassmann-Cayley代数在第四节定义奇点。
因为每对线满足在一个点(球形接头)的所有例子的解决方案是平等的,无论点位置或者腿是否具有对称性。
我们从文献中举例说明使用三个机器人的解决方案。
1.方向的致动器螺丝第一个例子[见图3(a)]。
每个腿驱动螺丝安装在球形接头中心和转动关节轴上。
特别注意的是是,致动器螺杆是垂直于轴的,这些方向被描绘在图3(b)。
第二个例子是Simaan etal提出的the3-USR机器人。
[见图4(a)]。
每条腿和驱动器螺丝安装在通过球形接头中心和包含转动关节轴中。
驱动器螺丝穿过球形接头中心并与转动关节轴相连。
这些方向被描绘在图4(b)。
第三个例子是Byun建造的3-PPSP机器人[见图5]。
每条腿和驱动螺丝的安装通过球形接头中心和正常的棱镜接头轴。
驱动器螺丝垂直于轴的,和致动器螺杆是垂直于轴的,这些方向被描绘在图5(b)。
3-(b)飞机和致动器螺丝4-(b)飞机和致动器螺丝的3自由度机器人图5-(a) 3-PPSP机器人提出Byun 5-(b)飞机和致动器螺丝2、.奇异性条件雅克(或superbracket)的机器人是分解成普通支架monomials并使用麦克米兰来分解的,用于解释部分3—b机器人,本文认为每个链有两个零距驱动器螺丝通过球形接头。
这三条线,每经过一个双球面上的接头平台(见图6,就这意味着每对线共享一个公共点(这些点在图6中)。
因此在本文中此类的机器人被认为是我们可以使用相同的标记点标记的6:3 GSP。
六线与相关各机器人通过双点,我们用同样的方式标记在图6。
图6 6 - 3 GSP五、结果本文提出了用一个广义奇异性分析研究并联机器人组成元素。
这些是每个腿链有一个球形接头的三足6自由度机器人。
因为球形关节需要驱动器,螺丝是通过纯粹的力作用于他们的中心,他们的位置沿链是不重要的。
组成元素包括144个机制不同类型的关节,每个关节都有不同的联合装置沿着运动链。
在列表提出并建立描述了几个机器模型。
大量机器人的相关分析组合发现认为是奇点的分析是取决于第一个找到的执行机构使用的相互作用的螺丝。
然后,借助组合方法和Grassmann-Cayley方法,得到刚度矩阵行列式和一个可以操作的协调自由形式,这可以理解为在获得一个简单的几何条件之后得出。
其定义的几何条件是,执行机构位置的线条和球形接头至少有一个相交点。
这个有效的奇异点条件考虑到所有组成元素中的机器人。
比较的结果与结果的奇点证明了其他所有先前技术描述的奇异条件实际上是特殊情况下的几何交叉点,而一个基于Grassmann-Cayley 代数的六自由度三足并联机器人的奇异性条件在这里被提出。
Singularity Condition ofSix-Degree-of-Freedom Three-Legged Parallel Robots BasedonGrassmann–Cayley Algebra Patricia Ben-Horin and Moshe Shoham, Associate Member, IEEEABSTRACTThis paper addresses the singularity condition of a broad class of six-degree-of-freedom three-legged parallel robots that have one spherical joint somewhere along each leg. First, the actuator screws for each leg-chain are determined. Then Grassmann–Cayley algebra and the associated superbracket decomposition are used to find the condition for which the Jacobian (or rigidity matrix) containing these screws is rank-deficient. These tools are advantageous since they facilitate manipulation of coordinate-free expressions representing geometric entities, thus enabling the geometrical interpretation of the singularity condition to be obtained more easily. Using these tools, the singularity condition of (at least) 144 combinations of this class is delineated to be the intersection of four planes at one point. These four planes aredefined by the locations of the spherical joints and the directions of the zero-pitch screws. Index Terms—Grassmann–Cayley algebra, singularity, three-legged robots.I. INTRODUCTIONDuring the last two decades, many researchers have extensively investigated singularities of parallel robots. Unlike serial robots that lose degrees of freedom (DOFs) in singular configurations, parallel robots might also gain DOFs even though their actuators are locked. Therefore, thorough knowledge of these unstable poses is essential for improving robot design and determining robot path planning.One of the principal methods used for finding the singularities of parallel robots is based on calculation of the Jacobian determinant degeneracy. Gosselin and Angeles [1] classified the singularities of closed-loop mechanisms by considering two Jacobians that define the relationship between input and output velocities. St-Onge and Gosselin [2] reduced the arithmetical operations required to define the Jacobian determinant for the Gough–Stewart platform (GSP), and thus enabled numerical calculation of the obtained polynomial in real-time. Zlatanov et al. [3]–[5] expanded the classification proposed by Gosselin and Angeles to define six types of singularity that are derived using equations containing not only the input and output velocities but also explicit passive joint velocities.Another important tool that has served in the analysis of singularities is the screw theory, first expounded in Ball’s 1900 treatise [6] and developed for robotic applications by Hunt [7]–[9] and Sugimoto et al. [10]. Several studies have applied this theory to find singularities of parallel robots, for example, [11]–[14]. Special attention was paid to cases in which the actuators are linear and the representing screws arezero-pitched. In these cases, the singular configurations were solved by using line geometry, looking for possible actuator-line dependencies [15]–[17]. Other approaches taken to classify singularities of closed-loop mechanisms can be found in [18]–[22].In this paper, we analyze the singularities of a broad class of three-legged robots, having a spherical joint at any point in each individual leg-chain. We focus only on forward kinematics singularities. First, we find the screws associated with the actuators of each chain. Since every chain contains a spherical joint, and since the actuator screws are reciprocal to the joint screws, they are zero-pitch screws passing through the spherical joints. Then we use Grassmann–Cayley algebra and related developments to get an algebraic equation which originates from the rigidity matrix containing the governing lines of the robot. The direct and efficient retrieval of the geometric meaning of the singular configurations is one of the main advantages of the method presented here.While the previous study [53] analyzed only seven architectures of GSP, each having at least three pairs of concurrent joints, this paper expands the singularity analysis to a considerably broader class of robots that have three legs with a spherical joints somewhere along the legs. Using the reduced determinant and Grassmann–Cayley operators we obtain one single generic condition for which these robots are singular and provide in a simple manner the geometric meaning of this condition.The structure of this paper is as follows. Section II describes in detail the kinematic architecture of the class of parallel robots under consideration. Section III contains a brief background on screws and outlines the nature of the actuator screws, which are zero-pitch screws acting on the centers of the spherical joints. Section IV contains an introduction to Grassmann–Cayley algebra which is the basic tool used for finding the singularity condition. This section also includes the rigidity matrix (or Jacobian) decomposition into coordinate-freeexpressions. In Section V a general example of this approach is given. Finally, Section VI compares the results obtained using the present method with results obtained by other techniques.II. KINEMATIC ARCHITECTURE This paper deals with 6-DOF parallel robots that have connectivity six between the base and the moving platform. Shoham and Roth [54] provided a survey of the possible structures that yield 6-DOF based on the mobility formula of Grübler and Kutzbach. They searched for all the possibilities that satisfy this formula with respect to the number of joints connected to any of the links. The GSP and three-legged robots are a subset of the structures with 6-DOF listed by Shoham and Roth. A similar enumeration was provided also by Podhorodeski and Pittens [55], who found a class of three-legged symmetric parallel robots that have spherical joints at the platform and revolute joints in each leg to be potentially advantageous over other structures. As discussed above, most of the reports in the literature limit their analysis to structures with spherical joints located on the moving platform and revolute or prismatic joints as actuated or passive additional joints. Exceptions are the family of 14 robots proposed by Simaan and Shoham [28] which contain spherical-revolute dyads connected to the platform, and some structures mentioned below which have revolute or prismatic joints on the platform. In this classification, we include five types of joints and more optional positions for the spherical joints.We deal with robots that have three chains connected to the moving platform, each actuated by two 1-DOF joints or one 2-DOF joint. These chains are not necessarily equal, but all have mobility and connectivity six between the base and the platform. Besides the spherical joint (S), the joints taken into consideration are prismatic (P), revolute (R), helical (H), cylindrical (C), and universal (U), the first three being 1-DOF joints and the last two being 2-DOF joints. All the possibilities are shown in Tables Iand II. The list contains only the robots that have equal chains, totaling 144 different structures, but robots with any possible combination of chains can also be considered as membersof this class. The total number of combinations, , is larger than 500 000, calculated as follows:III. GOVERNING LINESThis section deals with the screws that determine the platform motion. Since the robots under consideration have three serial chains, the direction of each actuator screw can be determined by its reciprocity to the other joint screws in the chain. The passive spherical joint in each chain forces the actuator screws to have zero-pitch (lines) and to pass through its center. Therefore, three flat pencils are created having their centers located at the spherical joints.Following a brief introduction to the screw theory that is extensively treated in [7], [73]–[75]; we address the reciprocal screw systems of all the joints listed in Section II.The geometric result for the singularity of the aforementioned class of robots is now compared with the results obtained by other approaches in the literature. First, we compare the singularity condition described above for the 6-3 GSP platform with the results reported for the line geometry method.The line geometry method distinguishes among several types of singularities, according to the relative geometric condition of he lines along the prismatic actuators [81]. We show that all these singularities are particular cases of the condition providedby (17c), which is valid for the three-legged robots under consideration as well as for the 6-3 GSP platform. The singular configurations of this structure according to line geometry analysis include five types: 3C, 4B, 4D, 5A, and 5B [17], [36].IV. SINGULARITY ANALYSISThis section determines the singularity condition for the class of robots defined in Section II. The first part consists of finding the direction of the actuator lines of action, based on the explanation introduced in Section III. The lines pass through the spherical joint center while their directions depend on the distribution and position of the joints. The second part includes application of the approach using Grassmann–Cayley algebra presented in Section IV for defining singularity when considering six lines attaching two platforms. Since every pair of lines meet at one point (the spherical joint), the solution for all the cases is symbolically equal, regardless of the points’ location in the leg or the symmetry of the legs. We exemplify the solution using three robots from the literature.A.Direction of the Actuator ScrewsThe first example is the 3-PRPS robot as proposed by Behi [61] [see Fig. 3(a)]. For each leg the actuated screws lie on theplane defined by the spherical joint center and the revolute joint axis. In particular,the actuator screw is perpendicular to the axis of , and the actuator screw is perpendicular to the axis of , these directions being depicted in Fig. 3(b).The second example is the3-USR robot as proposed by Simaan et al.[66][see Fig.4(a)].Every leg has the actuator screws lying on the plane passing through the spherical joint center and containing the revolute joint axis. The actuator screw passes through the spherical joint center and intersects the revolute joint axis and. Similarly, the actuator screw passes through the spherical joint center and intersects the revolute joint axis and , these directions being depicted in Fig. 4(b).The third example is the 3-PPSP robot built by Byun and Cho [65] [see Fig. 5(a)]. For every leg the actuated screws lie on the plane passing through the spherical joint center and being normal to the prismatic joint axis.The actuator screw is perpendicular to the axis of , and the actuator screw is perpendicular to the axis of , these directions being depicted inFig. 5(b).Fig. 3. (a) The 3-PRPS robot as proposed by Behi [61]. (b) Planes and actuatorscrews.actuator screws of the 3-USR robot.Fig. 5. (a) 3-PPSP robot as proposed by Byun and Cho [65]. (b) Planes and actuatorscrews.B. Singularity ConditionThe Jacobian (or superbracket) of a robot is decomposed into ordinary bracket monom ials using McMillan’s decomposition, namely (16). As explained in Section III-B, all the robots of the class considered in this paper have two zero-pitch actuator screws passing through the spherical joint of each chain. T opologically, this description is equivalent to the lines of the 6-3 GSP (or in [53]), which has three pairs of lines, each passing through a double spherical joint on the platform (see Fig. 6). This means that each pair of lines share one common point (in Fig. 6 these points are , , and ). Therefore for the class of robots considered in this paper, we can use the same notation of points as for the 6-3 GSP. The six lines associated with each robot pass through the pairs of points,and , in the same way as in Fig. 6. Due to the common points of the pairs of lines ,and ,denoted , and respectively, many of the monomials of (16) vanish due to (4).Fig. 6. 6-3 GSP.V. CONCLUSIONThis paper presents singularity analysis for a broad family of parallel robots. These are 6-DOF three-legged robots which have one spherical joint in each leg-chain. Since the spherical joints entail the actuator screws to be pure forces acting on their centers, their location along the chain is not important. The family includes 144 mechanisms incorporating diverse types of joints that each has a different joint arrangement along the chains. Several proposed and built robots described in the literature appear in this list. A larger number of robots are relevant to this analysis if combinations of different legs are considered. The singularity analysis was performed by first finding the lines of action of the actuators using the reciprocity of screws. Then, withthe aid of combinatorial methods and Grassmann–Cayley operators, the rigidity matrix determinant was obtained in a manipulable coordinate-free form that could be translated later into a simple geometric condition. The geometric condition consists of four planes, defined by the actuator lines and the position of the spherical joints, which intersect at least one point. This singularity condition is valid for all the robots in the family under consideration.A comparison of this singularity result with results obtained by other techniques demonstrated that all the previously described singularity conditions are actually special cases of the geometrical condition of four planes intersecting at a point, a condition that was obtained straightforwardly by the method suggested here。