电动葫芦参数
- 格式:pdf
- 大小:225.21 KB
- 文档页数:2

Toyo钢丝绳电动葫芦参数表1
TOYO环链电动葫芦是国际知名品牌,它运行效率高,钢构壳体,轻巧坚固,高强度吊钩和链条保证你的使用安全,吊上吊下都有极限开头装置,使电机自动停止。
相序保护装置,电磁制动装置。
CDI型钢丝绳电动葫芦运行速度8米每分,电机具有散热好,使用寿命长的特点,电动葫芦可以在高
强度工作场合长时间工作而不触发热保护,导致钢丝绳电动葫芦无法使用。
起重电机:电动葫芦为旁磁式
三相电机,采用B级绝缘,电机设计有停转即刹车的旁磁机构,使用安全可靠。
型电动葫芦参数。

Technical dataDemag FDR-Bas rope hoistFDR-Bas 3 - 5 - 10 foot-mounted hoist121211 en CN203 735 44714 IS 813220373544_e n _121211 © D e m a g C r a n e s & C o m p o n e n t sContentsDesign overview3Explanation of size designations/type assignment 3Selection criteria 4Selection table 5FDR-Bas 3- 2/1, H12, H20, H30 foot-mounted hoist, m ounting p osition A 6- 4/1, H12, H20 foot-mounted hoist, m ounting p osition A 7- 4/1, H30 foot-mounted hoist, mounting position A8- 4/1, H12, H20, H30 foot-mounted hoist, m ounting p osition B 9FDR-Bas 5- 2/1, H12, H20, H30 foot-mounted hoist, m ounting p osition A 10- 4/1, H12, H20 foot-mounted hoist, m ounting p osition A 11- 4/1, H30 foot-mounted hoist, mounting position A12- 4/1, H12, H20, H30 foot-mounted hoist, m ounting p osition B 13FDR-Bas 10- 2/1, H12, H20, H30 foot-mounted hoist, m ounting p osition A 14- 4/1, H12, H20 foot-mounted hoist, m ounting p osition A 15- 4/1, H30 foot-mounted hoist, mounting position A16- 4/1, H12, H20, H30 foot-mounted hoist, m ounting p osition B 17DR 3 - 5 - 10 motor data with pole-changing hoist drives18320373544_e n _121211© D e m a g C r a n e s & C o m p o n e n t sDesign overviewExplanation of size designations/type assignment1) Code CC - with contactor controlNC - without contactor control420373544_e n _121211© D e m a g C r a n e s & C o m p o n e n t s Selection criteriaExampleLoad capacity 5 t Load spectrum “Medium” from table Lifting speed 6 m/min Creep lifting speed 1 m/min Reeving 4/1Average hook path 3 m No. of cycles/hour 20Working time/day 8 hoursThe average operating time per working day is estimated or calculated as follows:The size of the hoist is determined by the loadspectrum, average operating time per working day, load capacity and reeving.L o a d c a p a c i t yOperating time L o a d c a p a c i t yOperating timeL o a d c a p a c i t yOperating time Operating timeVery heavy dead loadSmall partial load Small dead loadLarge partial load Medium partial load Medium dead loadHeavy dead loadL o a d c a p a c i t y4 Very heavyHoist units which are usually subject to maximum or almost maximum loads.3 HeavyHoist units which are usually subject to medium loads but frequently to maximum loads.2 MediumHoist units which are usually subject to small loads but rather often to maximum loads.The load spectrum(in most cases estimated) can be evaluated ac-cording to the definitions below:1 LightHoist units which are usually subject to very small loads and in exceptional cases only to maximum loads. 1. What are the operating conditions?2. What is the specified safe working load?3. To what height must the load be lifted?4. What is the required lifting speed?5. Do the loads need to be lifted and lowered withgreat accuracy?6. Is horizontal load travel necessary?7.How is the hoist to be controlled?For the medium load spectrum and an average daily operating time of 2,66 hours, the table above shows group 2m. For a load capacity of 5 t and 4/1 rope reeving, the following table indicates hoist size DR-Bas 5 - 5.Operating time/day = 2 · average hook path · no. of cycles/hour · working time/day=60 · hoist speedOperating time/day =2 ·3 · 20 · 8= 2,66 hours60 · 6The group is determined by the load spectrum and operating time.Load spectrum Average operating time per working day in hours 1Light 2-44-88-16more than 163Heavy 0,5-11-22-44-84Very heavy0,25-0,50,5-11-22-4Group of mechanisms toFEM1Am 2m 3m 4m ISOM4M5M6M71) Gearbox service life 20 % higher than the FEM full-load service life520373544_e n _121211© D e m a g C r a n e s & C o m p o n e n t s Selection tableNote:If no specifications for the mounting position or rope lead-off are included in an order, mounting position A with rope lead-off 1 is supplied as standard.Range Group of mechanisms Load capacityHook pathLifting speed vLifting Motor sitzFEMISO[t][m][m/min]DR-Bas 32/1MH-Bas 112A1Am M4212; 20; 3010/1,62m M51,612/23mM61,254mM714/11Am M446; 10; 155/0,8MH-Bas 112A2m M53,26/13m M62,54mM72DR-Bas 52/11Am M43,212; 20; 3010/1,6MH-Bas 132A2m M52,512/23mM624mM71,64/11Am M46,36; 10; 155/0,8MH-Bas 132A2m M556/13m M644mM73,2DR-Bas 102/11Am M46,312; 20; 308/1,2MH-Bas 160A2m M5510/1,63mM644mM73,24/11Am M412,56; 10; 154/0,6MH-Bas 160A2m M5105/0,83m M684mM76,3620373544_e n _121211© D e m a g C r a n e s & C o m p o n e n ts FDR-Bas 3 - 2/1, H12, H20, H30 foot-mounted hoist, m ounting p osition A43414444.epsGroup of mechanisms to FEM/ISO 1Am/M4, 2m/M5, 3m/M6, 4m/M7Dimensions in mmC1240d2 2)180FDR-Bas 3 dimensions in mm1) Weight data including rope, motor and bottom block2) In root of grooveSee page 21 for motordimensions F, G and LRope drum H12H20H30Foot distance R 590,5815,51095,5Hook travel n2168280,5421Rope lead-off point at highest hook position m2/centre R144256,5396,5Main dimension l1, limit-switch side/centre R 367,0479,5619,5Main dimension l2, gearbox side/centre R 357,5470,0610,0Distance l3, bracket frame bore hole 6118361116Rope dia. D 7Pitch P 7,8Weight 1) [kg]227242266720373544_e n _121211© D e m a g C r a n e s & C o m p o n e n tsFDR-Bas 3 - 4/1, H12, H20 foot-mounted hoist, m ounting p osition A43414544.epsFDR-Bas 3 dimensions in mmRope drum H12H20Foot distance R 590,5815,5Hook travel n484140Rope lead-off point at highest hook position m4/centre R23135Main dimension l1, limit-switch side/centre R 367,0479,5Main dimension l2, gearbox side/centre R 357,5470,0Distance l3, bracket frame bore hole 611836Rope dia. D 7Pitch P 7,8Weight 1) [kg]246264Group of mechanisms to FEM/ISO 1Am/M4, 2m/M5, 3m/M6, 4m/M7Dimensions in mmC1240d2 2)1801) Weight data including rope, motor and bottom block 2) In root of grooveSee page 21 for motordimensions F, G and L820373544_e n _121211© D e m a g C r a n e s & C o m p o n e n ts FDR-Bas 3 - 4/1, H30 foot-mounted hoist, mounting position AFDR-Bas 3 dimensions in mmRope drum H30Foot distance R 1095,5Hook travel n4210Rope lead-off point at highest hook position m4/centre R 275,5Rope dia. D 7Pitch P 7,8Weight 1) [kg]295Group of mechanisms to FEM/ISO 1Am/M4, 2m/M5, 3m/M6, 4m/M7Dimensions in mmC1240d2 2)1801) Weight data including rope, motor and bottom block2) In root of grooveSee page 21 for motor dimensions F, G and L43414744.eps920373544_e n _121211© D e m a g C r a n e s & C o m p o n e n tsFDR-Bas 3 - 4/1, H12, H20, H30 foot-mounted hoist, m ounting p osition BFDR-Bas 3 dimensions in mmRope drum H12H20H30Foot distance R 590,5815,51095,5Hook travel n484140210Rope lead-off point at highest hook position m4/centre R23135275,5Main dimension l1, limit-switch side/centre R 367479,5619,5Main dimension l2, gearbox side/centre R 357,5470610,0Distance l3, bracket frame bore hole 6118361116Distance l4, bracket frame bore hole 5587831063Rope dia. D 7Pitch P 7,8Weight 1) [kg]246264295Group of mechanisms to FEM/ISO 1Am/M4, 2m/M5, 3m/M6, 4m/M7Dimensions in mmC1240d2 2)1801) Weight data including rope, motor and bottom block 2) In root of groove1020373544_e n _121211© D e m a g C r a n e s & C o m p o n e n ts FDR-Bas 5 - 2/1, H12, H20, H30 foot-mounted hoist, m ounting p osition A43413944.epsFDR-Bas 5 dimensions in mm1) Weight data including rope, motor and bottom block2) In root of grooveSee page 21 for motordimensions F, G and LRope drum H12H20H30Foot distance R 619,5854,51149,5Hook travel n2174291436Rope lead-off point at highest hook position m2/centre R151268416Main dimension l1, limit-switch side/centre R 381,5499646,5Main dimension l2, gearbox side/centre R 376493,5641Distance l3, bracket frame bore hole 6408751170Rope dia. D 9Pitch P 10Weight 1) [kg]351381439Group of mechanisms to FEM/ISO 1Am/M4, 2m/M5, 3m/M6, 4m/M7Dimensions in mmC1256d2 2)2251120373544_e n _121211© D e m a g C r a n e s & C o m p o n e n tsFDR-Bas 5 - 4/1, H12, H20 foot-mounted hoist, m ounting p osition AFDR-Bas 5 dimensions in mm1) Weight data including rope, motor and bottom block 2) In root of grooveSee page 21 for motordimensions F, G and LRope drum H12H20Foot distance R 619,5854,5Hook travel n487145,5Rope lead-off point at highest hook position m4/centre R37,8133Main dimension l1, limit-switch side/centre R 381,5499Main dimension l2, gearbox side/centre R 376493Distance l3, bracket frame bore hole 640875Rope dia. D 9Pitch P 10Weight 1) [kg]394429Group of mechanisms to FEM/ISO 1Am/m4, 2m/M5, 3m/M6, 4m/M7Dimensions in mmC1256,5d2 2)22583414044.eps1220373544_e n _121211© D e m a g C r a n e s & C o m p o n e n ts 43414244.epsFDR-Bas 5 - 4/1, H30 foot-mounted hoist, mounting position AFDR-Bas 5 dimensions in mmGroup of mechanisms to FEM/ISO 1Am/M4, 2m/M5, 3m/M6, 4m/M7Dimensions in mmC1256,5d2 2)2251) Weight data including rope, motor and bottom block2) In root of grooveSee page 21 for motor dimensions F, G and LRope drum H30Foot distance R 1149,5Hook travel n4218Rope lead-off point at highest hook position m4/centre R276Main dimension l1, limit-switch side/centre R 646,5Main dimension l2, gearbox side/centre R 641Rope dia. D 9Pitch P 10Weight 1) [kg]4961320373544_e n _121211© D e m a g C r a n e s & C o m p o n e n tsFDR-Bas 5 - 4/1, H12, H20, H30 foot-mounted hoist, m ounting p osition BFDR-Bas 5 dimensions in mm1) Weight data including rope, motor and bottom block 2) In root of grooveRope drum H12H20H20Foot distance R 619,5854,51149,5Hook travel n487145,5218,5Rope lead-off point at highest hook position m4/centre R37,8133276Main dimension l1, limit-switch side/centre R 381,5499646,5Main dimension l2, gearbox side/centre R 376493,5641Distance l3, bracket frame bore hole 6408751170Distance l4, bracket frame bore hole 5788131108Rope dia. D 9Pitch P 10Weight 1) [kg]399429496Group of mechanisms to FEM/ISO 1Am/M4, 2m/M5, 3m/M6, 4m/M7Dimensions in mmC1256,5d2 2)2251420373544_e n _121211© D e m a g C r a n e s & C o m p o n e n ts FDR-Bas 10 - 2/1, H12, H20, H30 foot-mounted hoist, m ounting p osition A43413544.epsFDR-Bas 10 dimensions in mmGroup of mechanisms to FEM/ISO 1Am/M4, 2m/M5, 3m/M6, 4m/M7Dimensions in mmC1452d2 2)3151) Weight data including rope, motor and bottom block2) In root of grooveSee page 21 for motordimensions F, G and LRope drum H12H20H30Foot distance R 76910291359Hook travel n2195325488Rope lead-off point at highest hook position m2/centre R162,5292,5457,5Main dimension l1, limit-switch side/centre R 473,5603,5768,5Main dimension l2, gearbox side/centre R 471,5601,5766,5Distance l3, bracket frame bore hole 79510551385Rope dia. D 13Pitch P 14Weight 1) [kg]5976427001520373544_e n _121211© D e m a g C r a n e s & C o m p o n e n tsFDR-Bas 10 - 4/1, H12, H20 foot-mounted hoist, m ounting p osition A43413644.epsFDR-Bas 10 dimensions in mm1) Weight data including rope, motor and bottom block 2) In root of grooveSee page 21 for motordimensions F, G and LGroup of mechanisms to FEM/ISO 1Am/M4, 2m/M5, 3m/M6, 4m/M7Dimensions in mmC1343d2 2)315Rope drum H12H20Foot distance R 7691029Hook travel n497,5162,5Rope lead-off point at highest hook position m4/centre R33163,5Main dimension l1, limit-switch side/centre R 473,5603,5Main dimension l2, gearbox side/centre R 471,5601,5Distance l3, bracket frame bore hole 7951055Rope dia. D 13Pitch P 14Weight 1) [kg]7227801620373544_e n _121211© D e m a g C r a n e s & C o m p o n e n ts FDR-Bas 10 - 4/1, H30 foot-mounted hoist, mounting position A43413844.epsFDR-Bas 10 dimensions in mm1) Weight data including rope, motor and bottom block2) In root of grooveSee page 21 for motor dimensions F, G and LGroup of mechanisms to FEM/ISO 1Am/M4, 2m/M5, 3m/M6, 4m/M7Dimensions in mmC1343d2 2)315Rope drum H30Foot distance R 1359Hook travel n4244Rope lead-off point at highest hook position m4/centre R325Main dimension l1, limit-switch side/centre R 768,5Main dimension l2, gearbox side/centre R 766,5Rope dia. D 13Pitch P 14Weight 1) [kg]7001720373544_e n _121211© D e m a g C r a n e s & C o m p o n e n tsFDR-Bas 10 - 4/1, H12, H20, H30 foot-mounted hoist, m ounting p osition BFDR-Bas 10 dimensions in mm1) Weight data including rope, motor and bottom block 2) In root of grooveGroup of mechanisms to FEM/ISO1Am/M4, 2m/M5, 3m/M6, 4m/M7Dimensions in mmC1343d2 2)315Rope drum H12H20H30Foot distance R 76910291359Hook travel n497,5162,5244Rope lead-off point at highest hook position m4/centre R33163,5325Main dimension l1, limit-switch side/centre R 473,5603,5768,5Main dimension l2, gearbox side/centre R 471,5601,5766,5Distance l3, bracket frame bore hole 79510551385Distance l4, bracket frame bore hole 6939231253Rope dia. D 13Pitch P 14Weight 1) [kg]7227808531820373544_e n _121211© D e m a g C r a n e s & C o m p o n e n t s DR 3 - 5 - 10 motor data with pole-changing hoist drivesDesign is in accordance with the VDE regulations and the FEM design rules to meet the high demands made on electric hoists.FDR-Bas 3: Main/creep lifting F6Motor sizeNo. of polesLifting speedPNCDFnStarts/hRated current IN and start-up current I Afor 50 Hz 380 - 415 V cos cos[kW]%[rpm]I N [A]I A [A]φN φA MH-Bas 112A - 12/21210/1,6;12/2;5/0,8; 6/10,6204501604,69,20,360,4823,7402790807,947,10,940,87Required supply cable conductor cross sections and fuse linksMotor sitzMains connection delay fusefor 50 Hz 1)Supply lines 2) for 5% voltage drop ∆U and start-up current I A for 50 Hz380 V 380 V (∆U 20 V)[A][mm²][m]MH-Bas 112A - 12/232454MH-Bas 132A - 12/2 32653MH-Bas 160A - 12/250636Motor sizeNo. of polesLifting speedPNCDFnStarts/hRated current IN and start-up current I Afor 50 Hz 380 - 415 V cos cos[kW]%[rpm]I N [A]I A [A]φN φA MH-Bas 132A - 12/21210/1,6;12/2;5/0,8; 6/11,0204651607,717,400,350,5425,84028208011,974,730,930,81FDR-Bas 5: Main/creep lifting F6Motor sizeNo. of polesLifting speedPNCDFnStarts/hRated current IN and start-up current I Afor 50 Hz 380 - 415 V cos cos[kW]%[rpm]I N [A]I A [A]φN φA MH-Bas 160A - 12/2128,0/1,310/1,64,4/0,65/0,81,62046516012,528,50,310,4729,84028208021,5130,010,810,76FDR-Bas 10: Main/creep lifting F61) Fuse links also apply in conjunction with a cross-travel motor.2) The lengths of the supply lines are calculated on the basis of an earth-loop impedance of 200 m Ω.1920373544_e n _121211 © D e m a g C r a n e s & C o m p o n e n t sMotor dimensionsHoist motor sizeMH-Bas 112A - 12/2MH-Bas 132A - 12/2MH-Bas 160A - 12/2Dimensions in [mm]F109,2119,7148,7G 109,2119,7148,7L439514,5533Motor weight [kg]557690Required cross-section =Known cross-section · required length= 4 mm² · 70 m= 5,2 mm²Known cable length54 mselected cross-section = 6 mm²Modification of conductor c ross-sectionsExample for calculating the cross-sections Q of the conductors of cables exceed-ing the length indicated in the table:The current addresses of the sales offices and the regional subsidiaries and agencies worldwide can be found on the Demag Cranes & Components homepage at/ContactDemag Cranes & Components (Shanghai) Co., Ltd125 Ye Zhuang Road, European Industrial ZoneZhuanghang Town, Fengxian DistrictShanghai 201415, P.R. ChinaTelephone (86-21)3718 2222 · Telefax (86-21)5756 4558E-mail: info@Reproduction in whole or in part only with prior consent of Demag Cranes & Components No liability for errors or omissions. Subject to change.。

环链电动葫芦运行机构参数
环链电动葫芦运行机构的参数可以包括以下几个方面:
1. 电机参数:包括电机功率、额定电压、额定电流、额定转速等。
这些参数决定了电动葫芦的运行能力和功耗。
2. 传动装置:包括齿轮传动、链条传动、带传动等,需要确定传动比例、传动效率等参数,以及传动装置的结构材料、强度等。
3. 制动装置:用于控制电动葫芦的停止和固定,需要确定制动力、制动时间、制动器的类型(电磁制动器、机械制动器等)等。
4. 输电系统:包括电缆、导轨等,需要确定传输功率、导电材料、导电容量等。
5. 控制系统:包括控制电路、控制器等,需要确定控制方式(手动控制、远程控制、自动控制等)、控制精度等。
以上是一些常见的环链电动葫芦运行机构的参数,具体的参数会根据每种电动葫芦的设计和要求而有所不同。

10t电葫芦参数
10t电葫芦参数:
1、额定载荷(ton)5 7.5 10 20 30。
2、试验载荷(Gn)1.251.25 1.25 1.25 1.25。
3、电机功率(kw>0.50.50.50.50.75。
4、电源电压 380v 50Hz。
5、提升速度(m/min)0.090.180.120.090.090.06。
6、两钩间特小距离(mm)20060066073010401480。
7、起重链条行数 2 3 4 8 12。
8、起重链圆钢直径(mm)10 10 10 10 10。
9、起重高度每增加1米增加重量(kg)4.4 6.6 8.8 17.6 25.2。

CD1电动葫芦的参数
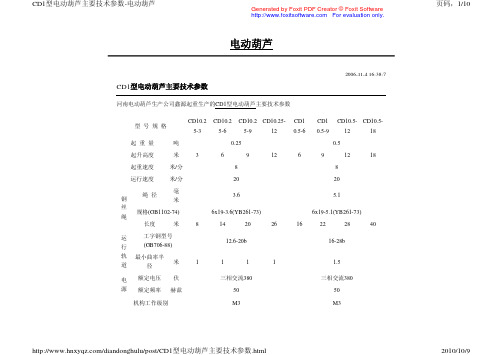
CD1型电动葫芦起重量: 0.5T、1T、2T、3T、5T、10T、20T CD1型电动葫芦起升高度: 6m、9m、12m、18m、24m、30m
CD1型电动葫芦工作级别: M3
CD1型电动葫芦工作级别: IP44 IP54
CD1型电动葫芦起升速度: 8m/min[10t为7m/min]
CD1型电动葫芦产品说明: CD1型电动葫芦是一种轻小型起重设备。
CD1型电动葫芦主要结构:减速器,运行机构,卷筒装置,吊钩装置,联轴器,软缆电流引入器,限位器.电机采用锥形转子电动机,集动力与制动力于一体.
CD1型电动葫芦安装使用:葫芦单梁,桥式起重机,门式起重机,悬挂起重机上.稍加改造,还可以作卷扬用.因此,它是,是提高劳动效率,改善劳动条件的必备机械.
CD1型电动葫芦产品特点
CD1型电动葫芦产品特点:重量轻、体积小、结构紧凑、品种规格多、运行平稳,操作简单,使用方便。
它们可以在同一平面上做直的、弯曲的、循环的架空轨道上使用,也可以在以工字钢为轨道的电动单梁、手动单梁、桥式、悬挂、悬臂、龙门等起重机上使用。
CD1型电动葫芦广泛应用在工厂、货栈、码头、电站、伐木场等场合,是起升搬运物品,最理想的起重设备。
钢丝绳电动葫芦第1部分型式与基本参数、技术条件
摘要:
一、钢丝绳电动葫芦概述
1.定义与用途
2.型式分类
二、钢丝绳电动葫芦的基本参数
1.型号表示方法
2.主要技术参数
三、钢丝绳电动葫芦的技术条件
1.工作环境
2.安全要求
3.性能指标
4.试验方法
正文:
钢丝绳电动葫芦是一种以钢丝绳为吊重件,通过电动机驱动的起重设备。
广泛应用于工业、矿山、建筑等领域,用于吊装、运输重物。
根据其型式,钢丝绳电动葫芦可分为双卷筒、单卷筒、固定式和悬挂式等。
不同型式的钢丝绳电动葫芦适用于不同的使用场合。
在钢丝绳电动葫芦的基本参数中,型号表示方法是依据国家标准进行的。
主要包括起重量、电动机功率、钢丝绳直径等主要技术参数。
这些参数直接影响到钢丝绳电动葫芦的起重能力和工作性能。
在技术条件方面,钢丝绳电动葫芦需满足一定的工作环境要求,如温度、湿度等。
同时,必须满足相应的安全要求,如防护等级、电气安全等。
此外,钢丝绳电动葫芦还需满足一定的性能指标,如升降速度、制动性能等。
电动葫芦国家标准电动葫芦是一种用于吊装和搬运货物的机械设备,广泛应用于工业生产、仓储物流等领域。
为了规范电动葫芦的设计、制造和使用,我国制定了一系列的国家标准,以确保电动葫芦的安全性、可靠性和稳定性。
本文将对电动葫芦国家标准进行详细介绍,以便相关行业人士和使用者了解和遵守相关规定。
首先,电动葫芦国家标准主要包括《GB/T 10054-2005 电动葫芦技术条件》、《GB/T 10055-2005 电动葫芦试验方法》和《GB/T 10056-2005 电动葫芦安全规程》等。
这些标准从不同的角度对电动葫芦的技术要求、测试方法和安全规程进行了规定,涵盖了电动葫芦的结构、性能、安全防护等方面的内容,为电动葫芦的生产和使用提供了具体的指导。
其次,根据国家标准《GB/T 10054-2005 电动葫芦技术条件》,电动葫芦的设计和制造应符合标准规定的技术要求,包括额定起重量、额定起升高度、工作级别、外形尺寸、电气设备、安全防护等参数。
同时,标准还对电动葫芦的性能指标进行了详细的规定,如起升速度、载荷稳定性、制动距离等,以确保电动葫芦在使用过程中能够稳定、安全地完成吊装作业。
此外,《GB/T 10055-2005 电动葫芦试验方法》规定了电动葫芦在出厂前和使用过程中应进行的各项试验,包括静载试验、动载试验、运行试验、制动试验等,以验证电动葫芦的各项性能指标是否符合标准要求。
这些试验方法科学合理,能够全面评估电动葫芦的质量和性能,为用户提供了选择和使用电动葫芦的依据。
最后,《GB/T 10056-2005 电动葫芦安全规程》对电动葫芦的安全使用提出了具体要求,包括操作规程、维护保养、安全防护等内容。
标准要求电动葫芦的操作人员必须经过专业培训,具备相关证书,并严格按照操作规程进行操作,确保吊装作业的安全进行。
同时,标准还规定了电动葫芦的日常维护保养要求,以延长设备的使用寿命,减少故障率,保障作业安全。
综上所述,电动葫芦国家标准是保障电动葫芦安全、可靠使用的重要依据,对于生产厂家、用户单位和操作人员来说,都具有重要的指导意义。
10t电葫芦参数一、引言电葫芦是一种常见的起重设备,用于吊装重物。
10t电葫芦是指起重能力为10吨的电动葫芦。
本文将详细介绍10t电葫芦的参数,包括起重能力、工作级别、卷筒容量、提升速度、电机功率等方面的内容。
二、起重能力10t电葫芦的起重能力为10吨,即可以将重量在10吨以内的物体进行吊装。
起重能力是选择电葫芦时最重要的参数之一,根据实际需求确定起重能力可以保证工作的安全和高效。
三、工作级别工作级别是指电葫芦的使用条件和工作强度等级,常见的工作级别有M3、M4、M5等。
10t电葫芦通常采用M5级别,适用于重载、频繁起吊和连续工作的场合。
工作级别的选择要根据实际使用情况来确定,以保证电葫芦的寿命和安全性。
四、卷筒容量卷筒容量是指电葫芦卷筒上可以容纳的钢丝绳长度。
10t电葫芦的卷筒容量通常为100米左右,可以满足大部分场合的使用需求。
卷筒容量的选择要根据实际起吊高度来确定,以保证钢丝绳的充裕长度。
五、提升速度提升速度是指电葫芦提升重物的速度,通常用米/分钟来表示。
10t电葫芦的提升速度一般在8-12米/分钟之间,可以根据实际需求进行调整。
提升速度的选择要考虑到起重物体的重量和高度,以及工作效率的要求。
六、电机功率电机功率是指电葫芦所配备的电动机的功率大小。
10t电葫芦的电机功率通常在7.5-11千瓦之间,可以根据实际需要进行选择。
电机功率的选择要考虑到起重物体的重量、提升速度和工作环境等因素,以保证电葫芦的正常运行和高效工作。
七、其他参数除了以上几个主要参数外,10t电葫芦还有一些其他参数需要考虑。
例如,起重高度、控制方式、安全保护装置等。
起重高度要根据实际需求来确定,控制方式可以选择手动控制或遥控控制,安全保护装置包括过载保护、限位保护、断电保护等,可以提高电葫芦的安全性和可靠性。
八、总结本文对10t电葫芦的参数进行了全面、详细、完整的介绍。
起重能力、工作级别、卷筒容量、提升速度、电机功率等参数都是选择电葫芦时需要考虑的重要因素。