WellVision 软件说明书
- 格式:pdf
- 大小:22.90 KB
- 文档页数:3

TESTING OF THE SYNTHETIC MODEL FOR TRANSPORT DEMAND AND FOR FORECAST ON VEHICLES, THE CASE STADYProfessor dr.sc. Atanasova V., Assoc. prof.dr.sc. Angelevska B. Professor dr.sc. Krstanoski N.Faculty of Technical Sciences, University “St. Kliment Ohridski”, Bitola, MacedoniaAbstract: Choosing a model, shaping and using a model represent a sensitive stage of the transport system planning process. Considering the fact that contemporary software packages exist, based on modern technology and long - term experience it is decided to rely on the software package PTV Vision VISUM, for forecast in the traffic in Bitola town. Synthetic model is designed by this software package, modeling is done on existing situation and model’s calibration. In this paper will be represented testing on the model for transport demand for the city of Bitola, their validation.KEYWORDS: SYNTHETIC MODEL, TRANSPORT DEMAND FORECAST, MODEL’S VALIDATION1.IntroductionThe forecast has always been a big challenge for scientist who conduct research in the field of future prediction and for others. The traffic forecast will be described in this paper for the Bitola town. Considering the fact that contemporary software packages exist, based on modern technology and long - term experience it is decided to rely on the software package PTV Vision – VISUM, for forecast in the traffic in Bitola town. With this software package, modeling is done on existing situation, model’s calibration and forecast on vehicles in Bitola town, for next 10 years.First data collection is done for the purposes of traffic planning. Synthetic model is designed by this software package where as input data are used values performed by counting the traffic at selected intersections in Bitola town.Model’s calibration is done in VISUM, with Projection of routes, tool. Thus simultaneously, testing of results and comparison of numbered model sizes (dimensions) is done and for the same will be presented cooperative view.Based on the created synthetic model, corrections are made and obtained predictions for the size of flows of thoroughfares in Bitola, for next 10 years, individually for the flows of personal cars.The model is based on facts that event A can describe the event B, if the event B contain the essential elements of the event A. According to the basic definition, the model should have ability to “reflect” the appearance that simulates. Formalization of the model is prepared for the final stage of determining the initial model. In this stage the model of general form is transferred to separate and determine the values. The whole procedure of determining these values represent the model’s ca libration. Then follow his validation.The goal of this paper is to represent the model’s validation of the model for transport demand for the city of Bitola, for cars, made in software package PTV Vision VISUM.2.Data collection for build synthetic model fortraffic flow in Bitola town2.1Zoning of the city of BitolaZoning is the process of determining and drawing the zones of a city. Zones are origin and destination of trips within the transport network. They are objects which describe areas with a particular land use and their location within the network (e.g. residential areas, commercial areas, shopping centres, schools).Metropolitan municipality of Bitola was divided on 46 areas in accordance with the recommendations for creating clean zones.2.2. Cordon counting and counting on intersectionsCordon implies notional boundary line around the city of Bitola, and counting of vehicles was carried out on all roads that intersect cordon line.The goal of cordon counting is to provide assessment of the accumulation of vehicles, and purpose of the survey is to give estimates on the number and structure of transit vehicles through the territory of Bitola town.The accumulation of vehicles on cordon line is determined by summing the total number of vehicles entering and leaving the space in a given period. Data collection for cordon counting was made for time of 1 hour, at the time from 2:00 pm to 3:00 pm.Counting on selected intersection in Bitola town was done during the period of 7:00 am. until 9:00 pm., 290 counters were included in two shifts.Data from 38 intersections were analyzed, rush hour was determined and these values were used as input values in the model.Values were written by ,,Turns” tool and then by the help of software flows of links were received.3. Modeling of transport demandModeling is done on existing situation, model’s calibration and forecast on vehicles in Bitola town and synthetic model is designed by software package PTV Vision-VISUMFig. 1 represents nodes and links of the network in the area where research is done. Accordingly, each link was added to the section capacity and vehicles speed. With red color are shown roads with a speed of 50 km / h, with green color are shown roads with a speed of 40 km / h and with blue color are shown roads with a speed of 30 km / h.Figure 1.Graphic display of roads network with different speed.First, in the proces of modeling in exsiting situation,for the purposes of the model is further zoning done. The main area include a different number of zones, so there are 46 zones. Fig. 2 represented the main zones (total 13) with blue, zones (total 40) with green and zones outside the city (total 6) with red color.Figure 2.Separation of the major areas in Zones.Second, we did choosing a model forecast of transport demand. The formulation of the model depends on the initial sizes and input variables that will encompass. The basic definition is that the model should have the ability to "reflect" the appearance that simulates.As input sizes in synthetic model are used the values of the counting of traffic at selected intersections, marked in red and shown on Fig. 3. Also are used data from cordon counting (cordon counting results are given in Section 2.2).Figure 3.Intersections counting in the area where research is done. Model’s calibration is done in VISUM, with Projection of routes, tool. The goal of calibration is bringing on counting and modals sizes together. Thus simultaneously, testing of results and comparison of numbered model sizes (dimensions) is done.Following comparative display of counting values (green color) and model’s sizes (in red) for personal cars.Figure 4.Counted values for cars on intersections, calculate in Visum, presented in sections.Figure 5.Modal values for cars on all network - existing situation.Figure 6.Counted and modal values for cars - existing situation.4. Forecast of traffic flow in Bitola townForecast is scientific prediction of some phenomena that are of great importance to human society. Based oncreatedsynthetic model, corrections are made and forecast on vehicles in Bitola town, for next 10 years.In the process of forecast the increase of 2% annually is taken into account. For the zones 26 and 27, taking into account the DUP (detailed urban plan) in this part of town, taken a balanced growth of 3% annually for the next years, in the process of forecast on vehicles for next 10 years.Figure 7.Forecast on vehicles in Bitola town, for next 10 years.Illustrative, in particular section would look like this: The section between the two junctions Partizanska –Toso Daskalot and Partizanska – Gorgi Naumov, are counted 555 vehicles, while the model gives us the value of 504 vehicles. The projected forecast for 10 years, obtained 651 vehicle.On Fig. 8 counted values are represented by green, and red-values obtained model sizes.Figure 8.An illustrated example for the section Partizanska - Ivo Lola Ribar and Partizanska –VaskoKarangelevski.Figure 9.Forecast on vehicle for next 10 years, on an illustrated example for the section Partizanska -Ivo Lola Ribar and Partizanska –VaskoKarangelevski.5.Model’s validationIn the frame of data collected analysis, in the traffic engineering practice often are used different statistical tests. Common used tests are the following:∙Testing the reliability of the sample,∙Compared or ,,Before and after” tests,∙Unparametric tests.In the actual study model’s validation is made according to the international standards. The cost of the reliability of the model is made according to the Design Manual for Roads and Bridges, Vol 12a, which is released the English Department for Transport. Model is good if it meets the following criteria:∙85% of obtained modal val ues shouldn’t have values of GEH greater than 5. The statistic method GEH isshape of the X2test, which is calculate with thefollowing formula:)(5,0)(2iriiriyyyyGEH+⋅-=Where:- y ri – is traffic flow from the model- y i – is counting traffic flow∙When the maximum deviation is 15%, deviations of modal from the counted values is according to thefollowing criteria:−for flows less than 700 veh/h, difference can be at most 100 veh/h−for flows from 700 to 2000 veh/h, difference can be most to 15%−For flows greater from 2700 veh/h, difference can be at most 400 veh/h.Testing the model, with Assignment analysis tool in software package PTV Vision Visum, got values from 92% (Photo 1) which is quite high value and indicate suitability for modal used.Standard deviation is:99,62)(2=-=∑nyyS iriywhich is as full acceptable value.Photo 1: Model’s validation6.ConclusionUsing the software package PTV Vision –VISUM we made forecast on vehicles in Bitola town, for next 10 years, based on a lot of input data, we got investigation outreach and data collection. We made comparative analyses of counted, modal and forecasted values. From output results can conclude that have an acceptable deviation of modals values from counted values that mean suitability for modal’s usage.Model testing, with Assignment analysis tool in software package PTV Vision Visum, indicate suitability for modal used. In output results for GEH are got values 0 and 1 which is smaller than 5, and with this is meet criteria obtained modal values to have values of GEH smaller than 5. Because this criteria is meet, that means that the model is good. For standard deviations is obtained value 62,99 which is as full acceptable. In this paper are represented photos which represented counted values for cars on intersections, calculate in Visum, presented in sections and obtained modal values for cars on all network.REFERENCES[1] Atanasova V., Ph. D., M.S.E., grad. traffic. Eng."Transport datacollection and analysis", internal lectures, University "St.Kliment Ohridski ", Faculty of Technical Sciences, Bitola, 2011.[2] Atanasova, V., Detelbach, S., Markovik, l., HANDBOOK PTVVision VISUM, Faculty of Technical Sciences, Bitola, 2012 [3] Traffic study for Bitola town, Agreement number 08-1124/1,from 03.06.2010, during one year (June 1 2010 to June 2011). [4] General urban plan of the city of Bitola, I book, Institute ofUrban Planning and Design, LLC, Bitola, Bitola, 1999.[5] Vaska Atanasova, Ph. D., M.S.E., grad. traffic. Eng."TrafficPlanning", internal lectures, University"Ss.Kliment Ohridski ", Faculty of Technical Sciences, Bitola, 2010.[6] Towards sustainable urban transport policies, Recommendationfor local authorities, SMILE project, European Commission, 2004.[7] PTV America, VISUM User Manual, Version 7.50. 2. MODELDESCRlPTlON. 2.1. Network Model. 2-3. 2.1.1. Transport systems, April 2001.。

NI Vision 控件模板Vision控件模板位于LabVIEW控件模板的最顶层,由一下元素组成:IMAQ Image.ctl—该控件是一个类型定义,用于声明图象类型的数据。
在V I的前面板中使用该控件代表图象类型数据。
例如,使用该控件作为一个子程序的输入或输出,使调用成成可以将一幅图像传送给子程序。
图像显示(Image Display)—该控件用于在LabVIEW 中直接显示图像。
也可以利用该控件创建关注区域 (ROIs)。
图像显示控件提供标准和3D版两种外观。
IMAQ 视觉控件(IMAQ Vision controls)—这里的控件用于将NI Vision的程序控件直接加入入用户自己的程序中获得相应的功能。
机器视觉控件(Machine Vision controls)—这里的控件用于将NI Vision 的机器视觉控件直接加入到用户自己的程序中以获得相应的功能。
NI Vision 函数模板NI Vision for LabVIEW 由三个主要的函数模板组成:常用视觉程序(Vision Utilities), 图像处理(Image Processing), 和机器视觉(Machine Vision)。
本节介绍这些模板以及它们的子模板。
常用视觉程序(Vision Utilities)常用视觉函数用于在NI Vision中处理和显示图像。
Image Management—管理图像程序组。
利用这些程序可以建立和释放图像,设置和读取图像的属性例如尺寸和偏移量,复制图象。
也可以使用一些高级的V is来定义图像的边框区域以及访问图像数据的指针。
Files—一组使用不同格式读、写图像文件,并从文件中获得所包含的图像的信息的程序模块。
External Display—用于在外部窗口显示图像的程序模块组。
使用这些程序模块可以完成以下任务:读取和设置窗口属性,如尺寸、位置、缩放系数为图像窗口设置调色板建立及使用图像浏览器在图像窗口上为选中的关注区域建立和使用不同的交互式绘图工具。
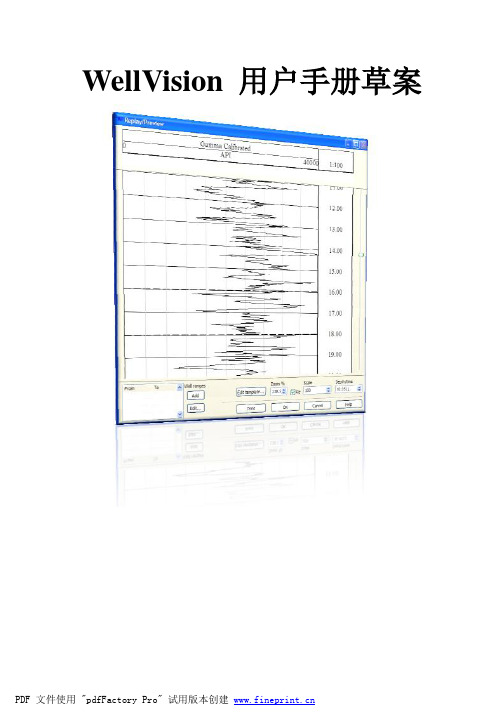
WellVision用户手册草案一、Wellvision用户手册 (4)二、主屏 (4)2.1 标题栏 (4)2.2 主控制台 (5)2.3 登录监督程序 (5)2.3.1 用户警告深度和速度 (6)2.3.2 记录时间 (6)2.4 状态监控 (6)三、菜单和按钮 (7)3.1 文件菜单 (7)3.2 采集菜单 (8)3.3 视图菜单 (8)3.5 选项菜单 (9)3.6 帮助菜单 (9)3.7 主按钮 (9)四、安装和测井配置 (10)4.1 采集设置 (10)4.2 默认打印 (11)4.3 发送 (12)4.4 Sondes (13)4.5 Winches (13)4.6 许可 (14)五、数据存储和工程管理 (15)5.1 工程 (15)六、Winch浏览 (16)七、工具浏览 (17)7.1 选择模式 (17)7.2 管理模式 (17)7.3 导入工具 (18)7.4 导出工具 (18)7.5 清除工具 (18)八、开始采集 (18)九、标定 (22)9.1 标定选项 (23)9.2 数据标签 (24)9.2.1增加标定点 (24)9.2.2 提取标定点 (25)9.3 标定图标签 (25)9.3.1图 (26)9.4 应用标定 (26)十、预览和处理 (27)10.1 导出 (29)10.2打印数据 (30)10.2.1 标题介绍 (31)10.2.2 范围选择 (33)10.2.3 其他选项 (33)10.2.4 打印设置 (34)10.2.5 打印 (34)10.3 回放/预览 (35)一、Wellvision用户手册二、主屏图1即是当第一次启动wellvision工程的默认显示主屏。
菜单和按钮提供工程的所有功能。
一般情况下,当菜单允许工程设置和扩展功能调整,按钮提供测井操作。
2.1 标题栏图2的标题栏包含wellvison安装和当前测井设置的大部分信息。
这对于设置和故障排除信息提供技术支持,包含的信息如下格式.版本——工程——测井——探空仪——绞车——系统Version是Wellvision的版本Project是记录所有数据的当前工程Well是当前工程记录数据的当前井眼。

Barrier GateUser ManualLegal Information©2022 Hangzhou Hikvision Digital Technology Co., Ltd. All rights reserved.About this ManualThe Manual includes instructions for using and managing the Product. Pictures, charts, images and all other information hereinafter are for description and explanation only. The information contained in the Manual is subject to change, without notice, due to firmware updates or other reasons. Please find the latest version of this Manual at the Hikvision website ( https:/// ).Please use this Manual with the guidance and assistance of professionals trained in supporting the Product.Trademarksand other Hikvision's trademarks and logos are the properties of Hikvision in various jurisdictions.Other trademarks and logos mentioned are the properties of their respective owners. DisclaimerTO THE MAXIMUM EXTENT PERMITTED BY APPLICABLE LAW, THIS MANUAL AND THE PRODUCT DESCRIBED, WITH ITS HARDWARE, SOFTWARE AND FIRMWARE, ARE PROVIDED "AS IS" AND "WITH ALL FAULTS AND ERRORS". HIKVISION MAKES NO WARRANTIES, EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, MERCHANTABILITY, SATISFACTORY QUALITY, OR FITNESS FOR A PARTICULAR PURPOSE. THE USE OF THE PRODUCT BY YOU IS AT YOUR OWN RISK. IN NO EVENT WILL HIKVISION BE LIABLE TO YOU FOR ANY SPECIAL, CONSEQUENTIAL, INCIDENTAL, OR INDIRECT DAMAGES, INCLUDING, AMONG OTHERS, DAMAGES FOR LOSS OF BUSINESS PROFITS, BUSINESS INTERRUPTION, OR LOSS OF DATA, CORRUPTION OF SYSTEMS, OR LOSS OF DOCUMENTATION, WHETHER BASED ON BREACH OF CONTRACT, TORT (INCLUDING NEGLIGENCE), PRODUCT LIABILITY, OR OTHERWISE, IN CONNECTION WITH THE USE OF THE PRODUCT, EVEN IF HIKVISION HAS BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGES OR LOSS.YOU ACKNOWLEDGE THAT THE NATURE OF THE INTERNET PROVIDES FOR INHERENT SECURITY RISKS, AND HIKVISION SHALL NOT TAKE ANY RESPONSIBILITIES FOR ABNORMAL OPERATION, PRIVACY LEAKAGE OR OTHER DAMAGES RESULTING FROM CYBER-ATTACK, HACKER ATTACK, VIRUS INFECTION, OR OTHER INTERNET SECURITY RISKS; HOWEVER, HIKVISION WILL PROVIDE TIMELY TECHNICAL SUPPORT IF REQUIRED.YOU AGREE TO USE THIS PRODUCT IN COMPLIANCE WITH ALL APPLICABLE LAWS, AND YOU ARE SOLELY RESPONSIBLE FOR ENSURING THAT YOUR USE CONFORMS TO THE APPLICABLE LAW. ESPECIALLY, YOU ARE RESPONSIBLE, FOR USING THIS PRODUCT IN A MANNER THAT DOES NOT INFRINGE ON THE RIGHTS OF THIRD PARTIES, INCLUDING WITHOUT LIMITATION, RIGHTS OF PUBLICITY, INTELLECTUAL PROPERTY RIGHTS, OR DATA PROTECTION AND OTHER PRIVACY RIGHTS. YOU SHALL NOT USE THIS PRODUCT FOR ANY PROHIBITED END-USES, INCLUDING THEDEVELOPMENT OR PRODUCTION OF WEAPONS OF MASS DESTRUCTION, THE DEVELOPMENT OR PRODUCTION OF CHEMICAL OR BIOLOGICAL WEAPONS, ANY ACTIVITIES IN THE CONTEXT RELATED TO ANY NUCLEAR EXPLOSIVE OR UNSAFE NUCLEAR FUEL-CYCLE, OR IN SUPPORT OF HUMAN RIGHTS ABUSES.IN THE EVENT OF ANY CONFLICTS BETWEEN THIS MANUAL AND THE APPLICABLE LAW, THE LATTER PREVAILS.Symbol Conventions The symbols that may be found in this document are defined as follows.ContentsChapter 1 Introduction (1)1.1 Product Introduction (1)1.2 Key Feature (1)Chapter 2 Installation (2)2.1 Installation Environment (2)2.2 Install Barrier Gate (2)2.2.1 Fix Barrier Gate Host (2)2.2.2 Install Boom Pole (4)2.3 Wiring (5)2.3.1 Connect to Peripheral Devices (5)2.3.2 Connect to Power Supply (7)Chapter 3 Debug (9)3.1 Remote Control (9)3.2 Button Operation (9)Chapter 4 Maintenance (13)4.1 Check Regularly (13)4.2 Check After Collision (13)4.3 Fault Code Description (13)4.4 Troubleshooting for Failed Auto Rising/Falling of Boom Pole After Power Cutoff (15)Appendix A. Peripheral Device Interfaces Introduction (16)Chapter 1 Introduction1.1 Product IntroductionBarrier gate is the entrance and exit management device to limit motor vehicle passing. It can control the boom pole automatically via parking lot management system. Or you can control the boom pole via buttons on remote controller.Barrier gate is widely applicable to toll station, parking lot, the entrance and exit of community and unit, etc. Its working temperature ranges from -30 °C to 70 °C (-22 °F to 158 °F).1.2 Key Feature●Adopts direct current brushless motor which can run steadily, applicable to entrance and exit, ETC system, etc.●The boom pole can rise rapidly and fall slowly. The barrier gate can learn the rising and falling limit positions automatically after it is powered on.●Over-voltage and over-current protection to prevent the motor from being burnt caused by locked rotor during running.●Supports anti-fall function via inductive loop, IR, etc., and protection functions including pressure wave, resistance rebound, etc.●Adjustable boom pole direction from left to right or from right to left.Chapter 2 Installation2.1 Installation EnvironmentThe installation environment of the barrier gate should meet the following requirements.●The installation space should be large enough to guarantee the boom pole can rise or fall normally.●Install the barrier gate on horizontal ground.●Installation surface requirements:○If no base is installed, the installation surface must be firm enough to fix the host to guarantee the barrier gate can run stably.○If base is needed, it is recommended to install the base with quick setting cement. The base should be horizontal. The height should be larger than 300 mm. The length and width of base should be larger than those of the actual barrier gate installation surface. Bury the set bolts prepared by yourself before installation.●If the barrier gate is anti-collision, the boom pole will flick 90° in reverse direction if it is impacted. Make sure there is no obstacle in the range.●Bury the cables before installation. The conduit should be 50 mm higher than the ground to avoid the gathered water on the ground to enter into the cable and cause short circuit.2.2 Install Barrier Gate2.2.1 Fix Barrier Gate HostFollow the steps below to fix the host of barrier gate.Steps1.Mark the positions of holes on the refuge island as shown below. The hole depth is approx. 120 mm.Figure 2-1 Mark Positions of HolesThe suggestions for positions of holes:●The holes in vertical direction should be near to the boom pole.●If the entrance/exit is unidirectional, the holes should be in the horizontal center of the refugeisland. If the entrance/exit is bi-directional, the holes in the horizontal direction should be far away from the entrance/exit.2.Punch the four M12 × 150 expansion screws in the package into the marked positions on refuge island, and fasten the nuts to make the screws expand to grip the ground. Then unfasten thenuts.Figure 2-2 Install Expansion Screws3.Uninstall the top and front covers.1)Use the L-type key to unlock the top cover.2)Lift the top cover gently and push it to take it down.3)Lift the front cover gently to take it down.Figure 2-3 Uninstall Top and Front Covers4.Fix the host.1)Put the layers on the host bottom and parallel them to the rising or falling direction of theboom pole.2)Put the host on the positions of expansion screws on the refuge island to make the screwspass through the layers. Keep the layers parallel to the rising or falling direction of the boom pole.3)Fasten the expansion nuts on the screws to fix the host.Figure 2-4 Fix HostKeep the supporting bracket of the boom pole vertically upward to avoid accident.2.2.2 Install Boom PoleFollow the steps to install boom pole.Steps1.Align the holes on the supporting bracket with those on the boom pole.2.Insert four M8 screws into the holes.3.Install flat washers, spring washers, and nuts on both sides of the screws.4.Fasten the nuts to fix the boom pole.Figure 2-5 Install Boom PoleCautionContact the professional technical personnel to change the boom pole. You may damage the barrier gate if you change it by yourself.2.3 Wiring2.3.1 Connect to Peripheral DevicesThe barrier gate can connect to peripheral devices such as entrance/exit capture unit.Steps1.Open the top cover of the host, and you can see the interfaces to connect peripheral devices.2.Connect peripheral devices to the interfaces as shown below.Refer to "Peripheral Device Interfaces Introduction" for the detailed definition of the peripheraldevices interfaces.Figure 2-7 Connect to Peripheral Devices2.3.2 Connect to Power SupplyConnect the laid power cord (RVV3 × 1.5 mm2 or above) to the power input of barrier gate. Installthe top and front covers. Use the L-type key to lock the top cover.●Cut off the power before wiring.●The power voltage of barrier gate is 220 VAC ± 10%. If the voltage exceeds the range, voltage stabilizer is needed.●Make sure the barrier gate is connected to the ground firmly, or it may cause electric shock.Figure 2-8 Power InputChapter 3 DebugAfter the installation completes, power on the barrier gate, and it will operate self-check of rising to limit position.After the self-check completes, you can control the barrier gate via remote controller or buttons.3.1 Remote ControlAfter the self-check completes, you can control the boom pole to rise, fall, and stop via the remote controller leaving factory with the barrier gate.3.2 Button OperationOpen the top cover of the host, and you can see the buttons and nixie tube. You can control the barrier gate via the buttons and judge the status via the nixie tube.There is respective initial status for the rising limit position, falling limit position, and rising speed of the barrier gate. You can adjust them via buttons if the initial status cannot meet the requirements of the installation site.Figure 3-1 Control ButtonsNote●If you need to hold the buttons to trigger operations, hold for 3 seconds or above.●The nixie tube shows the status (e.g., H0) and fault codes (hexadecimal characters, e.g., 1A). If the fault codes appear on the nixie tube, it means there is operation error. Contact the technical personnel of our company to solve the problems.Table 3-1 Button Operation DescriptionThe controller can learn no more than 481.Press2.Holdadjust the boom pole to H5 status.Displayed fallingunit of thedurationPressnixie tube displays rL.Apply control signal to let the boom pole rise to the limit position.Holdadjust the boom pole to H8 status.HoldPressChapter 4 Maintenance4.1 Check RegularlyThe barrier gate should be maintained every three months. Check according to the following instructions.●Check mechanical drive.●Check if the wiring and GND is firm.●Check if the motor sounds abnormally.4.2 Check After Collision●Check if the slewer is damaged. Change it if it is damaged.●Check if the boom pole is curved. Change it if it is curved.●Check if the barrier gate sounds abnormally during running. Contact the qualified after-sales service agent in time.4.3 Fault Code DescriptionWhen the barrier gate is abnormal, open the top cover, and observe the fault code on the nixie tube to troubleshoot.Table 4-1 Fault Code Description4.4 Troubleshooting for Failed Auto Rising/Falling of Boom Pole After Power CutoffIf the boom pole cannot rise or fall automatically after the power is cut off suddenly, follow the steps to solve the problem.Steps1.Uninstall the top and front covers.2.Insert L-type wrench into the hexagonal hole on the host.Figure 4-1 Rotate Wrench3.Rotate the wrench according to the barrier gate status.-If the barrier gate is in the falling limit status, rotate the wrench anticlockwise to raise the boom pole slowly until it can rise and fall automatically.-If the barrier gate is in the rising limit status, rotate the wrench clockwise to make the boom pole fall slowly until it can rise and fall automatically.Appendix A. Peripheral Device InterfacesIntroductionOpen the top cover of host, and you can see the interfaces as shown below.Figure A-1 Interfaces Table A-1 Interface Description。

InfiniiVision 示波器支援 6 個適合特定應用的軟體套件(選配)以及 1 個旗艦軟體套件。
這些軟體套件分別鎖定汽車、航太與國防、嵌入式設計、功率測試、USB 2.0 和NFC 等領域的量測應用。
不同於市場上其他示波器軟體選項,您無需擔心需為您的示波器選擇和購買哪些單獨的協定和/或進階分析功能。
每個InfiniiVision 軟體套件均具備完整的串列協定和先進的量測功能,可針對各個特定產業/特定應用所需的量測應用進行調整。
例如,具備測試現今車用串列匯流排所需的多項汽車協定和功能。
藉由使用InfiniiVision 汽車軟體套件,您可獲得所有必要的汽車觸發、解碼和分析功能,包括CAN、CAN FD、LIN、CXPI、FlexRay、SENT、PSI5(使用者可定義的曼徹斯特)、使用者可定義的NRZ、波罩限制測試和頻率響應分析(波特圖)。
此外,您只需購買單一軟體套件,便可獲得一系列完整的量測功能和協定,其物超所值的售價,比購買其他廠商的單一協定選項還划算。
如需測試嵌入式設計,您可能需要對一個或多個無所不在的串列匯流排進行觸發及解碼,包括I2C、SPI 和UART/RS232/RS485。
雖然一套特定的協定分析工具,例如I2C,也許就能滿足您目前的嵌入式專案需求,但您的下一個專案可能需要 UART、SPI 或 I2S 支援。
是德科技嵌入式軟體套件具備多元的觸發和解碼協定支援,以及先進的量測功能。
本文概述InfiniiVision 各種選配的軟體套件,並以表格列出每項協定和先進量測功能、訂購時需註明的產品型號,以及適用的是德科技InfiniiVision X 系列示波器。
如需這些選配軟體套件的詳細資訊,請參閱本文最後一頁所列的產品規格書。
車用軟體套件K eysight InfiniiVision 示波器的車用軟體套件支援協定觸發與解碼,適用於現今各種常見的汽車串列匯流排,以進行汽車動力傳動、車身控制與監測。

感谢您选择 RevitalVision,全球唯一一款经证实的可显著提高视力的 非手术治疗产品。
在开始使用您的定制 RevitalVision 软件之前,建议您仔细阅读该产品 学习指南,以及参考本用户指南来学习每一个课程。
这将帮助您更好地理 解您将完成的视觉训练,为您解释软件是如何工作的,以及保证您使用 RevitalVision 软件尽可能达到最理想的效果。
同时,如果您有任何问题或者需要进一步的支持,欢迎您联系您的个人视 力专家。
为方便记录,请您在如下空格处写下您的用户名和联系信息。
用户名密码个人视力专家(PVS )个人视力专家邮箱注:请谨记您的用户名和密码是区分大小写的内容1 – 操作指南 页面1.启动Revitalvision 62.RevitalVision训练建议 73.开始RevitalVision 84. 您的个人视力专家 82 – 系统1. 系统要求 103 – 开始1. 开始 122. 登录 123. 许可证和重要信息 134. 训练前须知 145. 校准 16 4 – 训练课程1. 准备训练课程 172. 开始训练课程 213. 操作训练课程 214. 选择正确的答案 245. 视觉任务 246. 选择正确的任务 307. 得分 308. 训练课程的反馈 页面319. 训练课程完成 31 5 – 技术支持1. 卸载RevitalVision 322. 故障排除 333. 合同条款 36 技术支持联系信息1 Array操作指南1.启动RevitalVision2.RevitalVision训练建议3.开始RevitalVision4.RevitalVision您的视力专家1)启动RevitalVision确保您电脑上的日期和时间设置正确,这样才能发送准确的信息到 RevitalVision。
需要设置网络许可下载相关插件和提交您的操作结果。
安装软件期间,设置好您的用户名和密码。
设置软件时,请您确保您显示器的亮度满足软件的需求。
WellVision User Manual DraftWellVision ManualContentsWellVision User Manual.......................................................................................................................... 1 Main Screen ............................................................................................................................................ 5 Title bar ............................................................................................................................................... 5 Main console ....................................................................................................................................... 6 Logging monitor .................................................................................................................................. 6 User Warning Depth and Speed ..................................................................................................... 7 Logging Times.................................................................................................................................. 8 Status Monitor .................................................................................................................................... 8 Menus and Buttons ................................................................................................................................. 8 File Menu ............................................................................................................................................ 8 Acquire Menu ..................................................................................................................................... 9 View Menu ........................................................................................................................................ 10 Options Menu ................................................................................................................................... 11 Help Menu ........................................................................................................................................ 11 Main buttons..................................................................................................................................... 11 Setup and Logging Configuration .......................................................................................................... 13 Acquisition Settings........................................................................................................................... 13 Print Defaults .................................................................................................................................... 14 Launching .......................................................................................................................................... 15 Sondes ............................................................................................................................................... 16 Winches............................................................................................................................................. 16 Licensing............................................................................................................................................ 17 Data storage and Project Management ................................................................................................ 19 Project ............................................................................................................................................... 19 Winch Browser ...................................................................................................................................... 21 Tool Browser ......................................................................................................................................... 23 Selection Mode ................................................................................................................................. 23 Management mode .......................................................................................................................... 24 Importing a tool ................................................................................................................................ 24 Exporting a tool ................................................................................................................................. 24 3WellVision Manual Removing a tool ................................................................................................................................ 24 Starting an acquisition .......................................................................................................................... 25 Calibration ............................................................................................................................................. 30 Calibration Selection ......................................................................................................................... 30 Data Tab ............................................................................................................................................ 31 Adding Calibration Points.............................................................................................................. 31 Extracting Calibration Points ......................................................................................................... 33 Calibration Mapping Tab................................................................................................................... 33 Mappings....................................................................................................................................... 33 Applying the calibration .................................................................................................................... 34 Reviewing and Processing ..................................................................................................................... 35 Exporting ........................................................................................................................................... 36 Printing Data ..................................................................................................................................... 38 Header presentation ..................................................................................................................... 38 Range selection ............................................................................................................................. 40 Other options ................................................................................................................................ 40 Print Setup .................................................................................................................................... 41 Print ............................................................................................................................................... 41 Replay/Preview ................................................................................................................................. 424WellVision ManualMain ScreenThe main screen for WellVision is shown in Figure 1 and is the default look of the program when first run. Buttons and menus provide access to all features of the program. In general, the buttons provide access to the logging operations while the menus allow adjustment of program setup and advanced features.Figure 1Title barThe title bar in Figure 2, contains much information about the installation of WellVision and the current logging setup. This is useful when troubleshooting setup information with technical support.The information contained is in the following format.Figure 2Version--Project--Well--Sonde--Winch—System Version is the version of WellVision 5WellVision Manual Project is the active project that all data will be recorded to Well is the active well that in the active project that data will be recorded to. Sonde is the currently selected sonde. Winch is the currently selected winch. System is the acquisition sub system currently selected.Main consoleThis part of the screen in Figure 3, shows the operation conditions of the logging system.Figure 3Depth is the current depth reported from the acquisition hardware. Speed is the computed speed of the winch movement. The arrow next to this field indicates the direction of movement. Voltage is the applied voltage to the wire line, NOT at the tool. Current is the current draw of the wire line. The green/red indicator represents communication status between the computer and the acquisition surface unit. If it is blinking green consistently, and displays a System OK message, computer and surface units are communicating correctly. If this indicator is red and displays a No System message, then the computer cannot detect the surface unit. Please refer to trouble shooting to resolve this problem.Logging monitorThe logging monitor in Figure 4 is an optional display that is on by default. It duplicates much of the information contained in the Title bar and Main Console. The format is just larger to allow better readability in field conditions. It also displays the current logging mode, Down, Up or Time.6WellVision ManualFigure 4Pressing the alarms button displays the alarm page in Figure 5 to setup the two alarms available when logging. The TD/Surface alarm is set by default to trigger at 5 meters to the surface (0m) or TD (drillers depth) of the well. When triggered the alarm flashes the depth display on the logging monitor. hen triggered, e Selecting the “Beep as well as flash” option causes the system alarm sound to be played.Figure 5User Warning Depth and Speed d7WellVision Manual The user can set a custom warning depth and speed for the alarm to trigger. The depth indicator flashes when the user depth has been reached. The Speed indicator flashes when the user speed has been exceeded.Logging TimesAlso on this screen is the estimated Time to Surface and Time to TD based on current speed and depth information. Note that the accuracy of the estimate depends on correct information supplied via the Well Editor.Status MonitorBy default the Status Monitor in Figure 6 is open at the bottom right of the screen. It contains information about what commands have been sent to the acquisition system, among other information. This is useful for troubleshooting and operator feedback.Figure 6Menus and ButtonsFile MenuThe file menu in Figure 7 provides access to project management and quitting WellVision Quickstart Opens the quick start dialog which provides a simple logging screen similar to the DOS based ALOG program. 8WellVision Manual Make Well Active... Allows the operator to select a Well from the current project and make it the current well. WellFigure 7New Project ... Opens the Project Editor dialog allows the creation of a new project. Open Project ... Opens a file browser dialog to allow the selectio of an existing project on disk. selection Recent Projects Shows a list of projects previously opened for quick access. Selecting a project from this list makes it the active project. Project Information ... Selecting this menu allows the operator to alter the current project information. Quit WellVision Quits WellVision. Stops logging cleanly if currently logging.Acquire MenuThe acquire menu in Figure 8 is only active when a valid licence and dongle have been used. The entire menu is disabled otherwise. Start Starts the acquisition process. Stop Stops the acquisition Set depth Opens the set depth dialog. The depth can be set as long as the acquisition system is connected and working.9WellVision ManualFigure 8Tool setup>Tool Selection Allows the selection of a tool for logging Tool setup>Tool Calibration Provides access to the tool calibration dialog.Figure 9Winch & Cable> Winch Selection... Shows the Winch browser dialog for winch selectionFigure 10Caliper Control If the current tool has a calibre arm, this menu is enabled allowing power control of the arm Detect System Opens the Acquisition settings dialog. The hardware ports and other settings can be access via this menu. Use this menu to connect to a system if there is a No System message in the main console. Power Off sonde If the power to the tool was left o it may be turned off from this menu. on,View MenuChanging the windows and view of data is done via the view menu shown in Fi igure 11. Some tools add extra views and corresponding entries in to this menu.10Figure 11Logging MonitorShows/Hides the logging monitors Status LogShows/Hides the Status monitor Dock MonitorsPositions the Main Window on t to the right side of the screen.Strip DisplayThis is the main display used for mo Options MenuConfiguration of Wellvision is doneFigure 12Help MenuFigure 13Main buttonsMany of the features controllable the top of the main window in F available.nitors. A tick indicates that the Logging Monitor is op tor. A tick indicates that the Status Log is open.on the left edge of screen and the Logging Monitor an for most tools when acquiring.done through the Options>Program Options... Menu lable from the menus are available for quick access Figure 14. When logging, only the Stop Logging and pen. tor and Status monitors Menu in Figure 12.ccess via the buttons at ng and Strip Options areFigure 14Quick startLaunches the quick start windowWinchesPresents the Winch Browser for selection of a winchSondesPresents the Sondes Browser for selection of a toolCaliper controlPresents the calliper control dialog for opening and closing calliper arms if the selected tool has an arm present. Otherwise this button is disabled.Start LoggingStarts the logging sequence by showing the logging sequence windowStop LoggingDisplays the logging sequence window to stop the current acquisition.Setup and Loggi All persistent settings used W Options dialog shown in Figure 15Acquisition Settings The acquisition settings tab conta used in data recording. Most setti sequence.Figure 15Leave sonde on after runSelecting this allows power to the manually overridden at the end of Log ModeLogging can be performed either b DirectionIn depth mode logging, the directi Press the direction arrow to toggle Depth intervalIn depth mode logging, this specifie Time IntervalIn time based logging, this specifies Logging Configurationin WellVision are accessible from the Program Op 15 consists of six tabs of information.ingscontains information about what system and loggin settings in Figure 15 are defaults by can be overriddo the sonde to remain on after a logging run is com nd of the logging sequence. her by depth or time.direction of logging is important as data will only be r oggle between the up and down directions. pecifies the rate at which data is to be recorded. This fecifies the rate at which data is to be recorded. This fie m Options menu. The ogging parameters are verridden in the logging s complete. This can be y be recorded one way. This field is in cm. This field is in ms.Strip DisplayThe defaults used for presenting d the size of the filtered display data lines. Plot range is the amount of the number of traces visible at one Acquisition systemThere are multiple systems used to system. Use the drop down list her Setting..The options for an acquisition syste particular to the system but usually Connect at launchIf a DLS or appropriate system is communicate with it automatically Print DefaultsThe default options for printing ca from the Print dialog when printing Figure 16Default Header LayoutThis is the path to the header layou ting data in acquisition mode are specified here. Filt data (if not present in a template). Plot with is the th nt of data visible on screen in either meters or secon at one time on the screen. sed to acquire data from specialized tools. Most tools st here to select the system to use for a particular too system can be manipulated using the settings button usually contain settings for PC to surface unit commun em is connected when WellVision launches, it m tically.ing can be altered from the tab in Figure 16. These c rinting.layout to loaded by default when printing.e. Filter width specifies he thickness of the plot seconds. Visible plots is tools only use the DLS4 ar tool. button. The settings are mmunications. t makes an attempt to hese can be overriddenDefault PrinterThis is the printer that will be selected by default for printing. Change the default by selecting a printer from the drop down list and press “Set now”Centre print on pageCentres the data printout. This does not affect data, however it is more aesthetically pleasing.Always print even number of pagesThis aids in the folding of fan fold paper when performing multiple prints.Scales at end of tracesPrints the scales at end of the traces plots as well as the start.Use project templates if availableIf a project has a specialized template for the tool, it will be used for printing/replaying instead of the inbuilt template.Use project header if availableIf a project has a specialized header, it is used instead of the default header file.CopiesThe number of copies to print.LaunchingThe settings available in Figure 17 allow the customisation of what displays are opened during automatically after launch.Last project usedIndicates the last project used in a previous session of WellVision.Dock monitorsAutomatically load all monitors and positions them on the right side of the screen. If this is checked the other check boxes are disabled.Logging monitorThis will open the Logging Monitor directly after launching WellVision.Status MonitorThis will open the Status Monitor directly after launching WellVision.Figure 17SondesThis tab provides access to To displayed. Press the Manage tools Figure 18WinchesSimilar to the sondes tab, this tab Current tool selected is displayed.winch.the Tool Browser in management mode. The Curren tools button to manage and select a new tool.s tab provides access to the Winch Browser in managayed. Press the Manage Winches button to manages Current tool selected is management mode. The nages and select a newFigure 19LicensingWellVision requires a license file an the Acquire menu).The only setting on this tab is the p found on your hardware dongle.Figure 20file and attached dongle to provide the acquisition fun the path to the licence file to use. This path is norma gle.on functionality (enable normally to a licence fileData storage and Project ManagementFiles in WellVision are stored in a folder hierarchy to limit the need of manual file naming and locating somewhere to store the files. Never manually edit any files in this hierarchy, as it may upset the data relationships between the contained files.ProjectThe project is the top level directory of the data hierarchy. All Wells and Runs are stored under this directory. The individual files in this directory contain project information and other setup details.Creating a new project is performed by using the File->new project menu. The Project Editor shown in Figure 21 allows the entry of the project informationFigure 21Project title is the name of the project. This will be the name of the project folder on disk. File location is the location on disk where the project is to be stored. Press the browser button to open the folder to use and then press “Use current folder for project location”.The Client, Contractor and Operators are all required fields. Changing the value of any of these brings up another dialog to add more detailed information. Only the first field is required though.Location and Field are the corresponding physical/topological location and field of the project. These values are used when creating a well, so it strongly suggested that they have correct values, as it simplifies creating a new well later on.After the project is created it becomes the active project. Wells and runs created are always placed in the active project.Winch BrowserThe Winch Browser operates in two modes: selection and management. Selection mode is accessible from the usual Winches button, the Acquire Menu or from the logging sequence. Management mode is only accessible from the Program Options menu.Winch Browser provides a list of winches currently configured for use WellVision as shown in Figure 22.Figure 22Each winch contains critical information regarding logging operation. The three most important pieces of information are the cable length, conductors and resistance values of the winch cable.These values must be correct for best operation of equipment, and are explained bellow:Winch model: Model of the winchWinch Serial: Serial number of the winchConductors: Specified how many conductors the winch cable hasLength: Total length of cable on winch.Resistance: Ohms per meter of cable resistanceInductance: Henries per meter of cable inductanceCapacitance: Farads per meter of cable capacitanceThe length and number of conductors in the winch are very important should be filled out correctly in order for tools to operate correctly.Winches entries can be created by pressing the "+" button, and removed using the "-" button. Selecting and pressing the "edit" button allows editing selected winch entry.Editing and creation of a winch entry is done via Winch Entry editor. Press "Ok" to make changes.Tool BrowserSelection and management of the tools used for logging is done via the Tool Browser. Its features are restricted to the context in which it is used; either selection or management. The main sections of the tool browser are the main tool table, picture and bottom table as shown in Figure 23.Figure 23The main table to the left shows the currently available tools for selection. Selecting a tool updates the picture and Channel summary table.The right side of the Tool Browser shows a graphic outline of the current tool selected as an extra guide to tool selection.The Channel Summary table shows what channels are available for the tool and their offsets and calibration units.Selection ModeSelection mode is accessed via normal tool selection. The Sondes button on the main screen and tool selection from the Acquire menu and the logging sequence allows the normal selection mode. In thismode a sonde may be selected for use in logging. The Import ,Export and - buttons shown in Figure 23 are not available in this mode.Management modeManagement mode is only accessible from the Program Options menu. This mode allows tool files to be imported, exported and removed from the tool list.Importing a toolPress the import button and select a tool file that has previously been exported. The imported tool will contain all tool information including the layout and calibration information. If the model and serial number combined are unique, the tool will be added to the tool list. Otherwise a message will appear indicating that the tool already exists and cannot be imported.Exporting a toolSelecting the desired tool to export and pressing the Export button will prompt for a file location to store the tool. This exported tool will contain the layout and calibration history information currently.Removing a toolSelect the desired tool and press the "-" button to remove. This cannot be undone so make sure it is the right tool and that you really want to delete it.Starting an acquisitionThe logging of data is performed via the “Start” logging commands found in the Acquire menu, the Start button on the main screen or via the quick start window. The logging sequence is activated, presenting the user successive screens of options and information.The first screen of the sequence is shown in Figure 24. This indicates the Project and Well that the data will be recorded in. If the active Well has not been selected then a new one will have to be created. See section “Data Storage and Project Management” regarding options for creating a new Well.Figure 24The Function keys (F1,F6 and F8) can be used as a pseudo compatibility with ALOG navigation.The following screen in sequence is shown in Figure 25. The active tool/instrument and winch selection can be altered here by pressing the Change... buttons. More on the Tool Selector and Winch Selector is described in section “Winch Browser”.If a previous run of data was recorded with the selected tool and in the current well, data can be appended to it rather than creating a new run. The “Append to previous” dropdown list displays a list of valid runs to which the data can be appended.Figure 25After tool and winch selection the mode of logging can be selected from on the next screen, as shown in Figure 26.Figure 26Depth mode records data when the tool has moved a corresponding distance in the well. The direction of the movement depends on the Direction selection. When in this mode, data will only be recorded when the movement of the tool is in the right direction. Change the direction of logging by pressing on the Direction arrow. Note that tools with calliper arms only allow logging the up direction. Time mode logging disables the Direction as data is stored by time index instead of depth.The Sample Interval field specifies the rate of depth or time recording. For higher resolution data, use smaller numbers (eg 1cm for depth mode and 100ms for time mode). Note that the actual value of the depth rate may vary as it is dependent on the depth factor of the selected winch.Figure 27 shows the next display in the logging sequence. This screen allows the depth of the logging system to be set. Also the current speed of the winch system is displayed.To change the depth press the “Set” button, to display the set depth dialog shown in Figure 27.Figure 27This is the screen at which the tool needs to be lowered to its starting position. If you a logging Down, this would be at the top of the well. If you are logging up, the starting position will be at the bottom of the well.If the tool has a calliper arm attached the screen in Figure 28 will show. This allows the control of the calliper arm. Press the Open button to power the arm in an opening direction. Likewise press Close to power the arm in the closing direction. The graph of current indicates the power draw of the arm motor. When there is a sharp transition on this graph the arm has completed an open or close movement.To continue the logging sequence, the power applied to the calliper arm, must be turned off, by pressing the “Power Off” button.Figure 28At this stage in the logging sequence logging is ready to commence. Normally pressing the OK button will initialize the data storage and communications with the tool.Figure 29In the case where advanced power and communications settings may need to be used please see section #.After initialization, the display in Figure 30 will show, indicating to start the winch. It will remain until the Ok button is pressed or until the winch starts to move。
服务热线:400-150-1816电话*************传真*************地址:北京市昌平区创新路27号昌平科技园区3号5层网址:北京威林视讯科技有限公司VLINC专业视听显控产品手册专业音视频产品与解决方案提供商2022北京威林视讯科技有限公司COMPANY PROFILE公司简介威林的愿景威林的使命威林的核心价值观威林视讯是专注于显示控制一体化解决方案的科技企业,经过多年发展,已经成长为国内显控领域的知名品牌,拥有多项独立自主的知识产权。
自成立以来,威林视讯连续推出多个创新产品,包括纯硬件图像处理器,到图像综合管理平台,从分布式处理器到可视化分布式系统,从46寸液晶拼墙到70寸液晶拼墙,从高清到8K 系统整体解决方案,威林视讯的每一次创新都引导着行业的发展和进步,威林视讯提出的所见即所得,所得即可操作的理念,已经成为显控系统的行业标准。
威林视讯有拥有强大的研发实力和方案设计服务能力,核心团队均具备10年以上的行业经验,与北京大学,北京交通大学等多所高校建立产学研合作关系,在掌握图像算法,具备产品设计能力的基础上,对于客户的订制化需求能够快速响应,从研发到制造,从设计到施工,建立了一整套的客户服务体系。
威林视讯在北京,上海,深圳,广州,南京,成都,南昌,乌鲁木齐等国内主要城市均设有分支机构,具备国内省会级城市的快速响应能力。
威林视讯的团队成功完成多个典型案例,包括北京新机场,北京公安局合成作战指挥中心,天津市委宣传部,国家气象局,火箭军某基地,上海联通,广州移动,酒泉卫星发射基地,滴滴出行等标志性项目,均为所在领域的标杆项目。
共同成长作为一个发展中的公司,威林愿意帮助客户成长,努力给客户提供技术培训,商务支持等各种支持,希望客户在竞争中取胜,威林的体系对客户保持开放,愿意帮助客户建立认证体系和获得各种知识产权。
同样,威林也希望能够跟员工一起成长,公司鼓励员工参加各种学历或者非学历教育并承担部分学费,公司内部也会不断建设良好的分享,培训和晋升的体系,希望能够鼓励每一位员工都能发挥自己最大的价值。
配置指南InfiniiVision 软件订购指南应用软件选件InfiniiVision 示波器支持六种应用软件包和一个软件包捆绑套件。
应用软件包支持的领域包括汽车、航空航天与国防、嵌入式设计、电源测试、USB 2.0 和 NFC 测量应用。
与市场上的其他示波器软件选件不同,您无需操心需要为示波器选购单独的协议和高级分析功能。
每个 InfiniiVision 软件包选件都包含一系列串行协议和高级测量功能,针对特定行业应用进行了专门优化。
例如,当今的汽车串行总线测试涉及到多种总线协议和功能。
InfiniiVision 示波器的汽车软件选件支持汽车电子串行总线测试所需的触发、解码和分析等功能,具体包括CAN、CAN FD、LIN、CXPI、FlexRay、SENT、PSI5(用户可自定义的曼彻斯特编码)、用户可自定义的 NRZ、模板极限测试和频率响应分析(波特图)。
此外,您购买是德科技的一个软件包中所包括的一系列测量功能和协议,其价格可能还不到其他供应商一个协议选件的价格。
如果您正在测试嵌入式设计,那么有可能需要在常用的串行总线上进行触发和解码,包括 I2C、SPI 和 UART/RS232/RS485。
虽然专用的协议分析仪器(例如 I2C)可能会满足您当前的嵌入式项目之需,但您的下一个嵌入式项目可能需要 UART、SPI 或I2S 支持。
这个嵌入式软件选件支持各种触发和解码协议,以及先进的测量功能。
本文在下面概括介绍了 InfiniiVision 示波器的可选软件包,并通过表格列出了每个的协议和高级测量功能、订购号以及与不同 Keysight InfiniiVision X 系列示波器的兼容性。
关于这些可选软件的详细信息,请参阅本文档末尾附近列出的技术资料。
汽车软件套件Keysight InfiniiVision 示波器的汽车软件包能够对当今汽车动力总成系统以及车身控制与监测系统中最常用的汽车串行总线进行协议触发和解码。
NI Vision控件模板Vision控件模板位于LabV IEW控件模板的最顶层,由一下元素组成:IMAQ Image.ctl—该控件是一个类型定义,用于声明图象类型的数据。
在V I的前面板中使用该控件代表图象类型数据。
例如,使用该控件作为一个子程序的输入或输出,使调用成成可以将一幅图像传送给子程序。
图像显示(ImageDispla y)—该控件用于在LabVI EW 中直接显示图像。
也可以利用该控件创建关注区域 (ROIs)。
图像显示控件提供标准和3D版两种外观。
IMAQ 视觉控件(IMAQ Vision contro ls)—这里的控件用于将NIVision的程序控件直接加入入用户自己的程序中获得相应的功能。
机器视觉控件(Machin e Vision contro ls)—这里的控件用于将NIVision 的机器视觉控件直接加入到用户自己的程序中以获得相应的功能。
NI Vision函数模板NI Vision for LabVIE W 由三个主要的函数模板组成:常用视觉程序(Vision U tilit ies), 图像处理(ImageProces sing), 和机器视觉(Machin e Vision)。
本节介绍这些模板以及它们的子模板。
常用视觉程序(Vision Utilit ies)常用视觉函数用于在NI Vision中处理和显示图像。
ImageManage ment—管理图像程序组。
利用这些程序可以建立和释放图像,设置和读取图像的属性例如尺寸和偏移量,复制图象。
也可以使用一些高级的V is来定义图像的边框区域以及访问图像数据的指针。
Files—一组使用不同格式读、写图像文件,并从文件中获得所包含的图像的信息的程序模块。
System Requirements
WellVision is designed to run on modern computer hardware and operations systems for the Microsoft Windows familiy. A moderate performace computer is normally sufficient to run WellVision for all but the graphic intensive Sonic and Spectral data logging.
Base requirments
•Windows XP Professional or higher
•512MB RAM
•150MB Free Disk space for installation.
• 1 Free USB port for Dongle (2 for spectral system)
•Serial port
•1024 x 768 screen resolution minimum
•Windows based printer for printing
•Administrative access to its installed location
Recomended requirements
• 1 GB RAM for Sonic and Spectral logging or printing while logging.
• 2 free USB ports. One for the Dongle and one for a USB to serial converter (two USB serial if using spectral system)
WellVision will not allow acquisition of new data if the dongle is not present. Replaying of data is still available though.
Installation
The WellVision installer is available from the USB dongle.
1. Insert the Dongle into a free USB port.
2. Windows should present a new window of the dongle called "WELLVISION"
3. In the folder called WellVision Installer go to the Folder Volume.
4. Double click on the file "Setup.exe". This will launch the installer.
5. Follow the onscreen instructions for location of installation and agreement to the licence
provided.
6. Restart the computer before running WellVision if prompted.
Note:
If you are performing a reinstallation settings such as Sondes and Winches will be overwritten with the defaults. In order to keep the original tools and winches, please export them prior to reinstallation.
Licence file setup
If you intend to perfrom logging with the installation, a correctly setup licence file must be used. The licence file exists on the dongle by default. To setup the licence file: •Launch WellVision
•Go to menu Options->Program Options
•Go the the Licencing Tab
•Press the browse button on the licence field
•Browse to the dongle and select the license file (it has a .wvlic extension) and press open.
•Press OK in Preferences dialog
•Quit WellVision from the menu File-> Quit
•Relaunch WellVision
If the licence was selected correctly and the license is valid the Acquire menu item will become active.
Note:
If the dongle is removed during acquisition the only operation available is File->Quit. Quitting will save all your data currently being acquired however you must quit to stop. To gain full control of acquisition again, reinsert the dongle before launching WellVision.
Basic Logging Sequence
The basic loggin sequence for a typical day of logging is as follows
1. Launch WellVision
2. Select a project or create new one
3. Select the tool and winch
4. Start logging.
5. Create a well if required
6. Record data
7. Stop logging.
8. Replay current well
9. Repeat from 3
10. Quit WellVision
Single Tool and single Project Logging
If your are only using a single tool and only record data to the same project, the sequence is very simple. WellVision remembers the last project ,well, winch and tool combination used previsously (even afer a relaunch). This makes tool and winch selection unnessissary.
1. Launch WellVision
2. Start logging
3. Create new well if required
4. Record data
5. Stop Logging
6. Replay current well
7. Repeat from 2
8. Quit WellVision。