飞行模拟器六自由度运动系统的关键技术及研究现状
- 格式:pdf
- 大小:233.62 KB
- 文档页数:4
《六自由度机械臂控制系统设计与运动学仿真》篇一一、引言六自由度机械臂,以其出色的灵活性、灵活的运动空间以及复杂的运动能力,在现代自动化工业和高端科技领域有着广泛的应用。
本篇论文旨在介绍一种六自由度机械臂控制系统的设计与运动学仿真。
通过详细阐述系统设计、控制策略以及运动学仿真结果,为六自由度机械臂的研发与应用提供理论依据和实验支持。
二、系统设计1. 硬件设计六自由度机械臂控制系统硬件主要包括机械臂本体、驱动器、传感器和控制单元等部分。
其中,机械臂本体采用串联式结构设计,通过六个关节的协调运动实现六自由度。
驱动器选用高性能直流无刷电机,并配备高精度减速器以提高控制精度。
传感器包括位置传感器、力传感器等,用于实时监测机械臂的状态和外部环境信息。
控制单元采用高性能微处理器,负责接收传感器信息、处理控制指令并输出控制信号。
2. 软件设计软件设计主要包括控制系统算法设计和人机交互界面设计。
控制系统算法包括运动规划、轨迹跟踪、姿态调整等模块,通过优化算法提高机械臂的运动性能和控制精度。
人机交互界面采用图形化界面设计,方便用户进行操作和监控。
三、控制策略1. 运动规划运动规划是六自由度机械臂控制系统的重要组成部分,主要任务是根据任务需求规划出合理的运动轨迹。
本系统采用基于规划的方法,通过预设的运动路径和速度参数,使机械臂按照规划的轨迹进行运动。
同时,采用动态规划算法对机械臂的运动进行实时调整,以适应外部环境的变化。
2. 轨迹跟踪轨迹跟踪是六自由度机械臂控制系统的核心部分,主要任务是使机械臂在运动过程中始终保持正确的姿态和位置。
本系统采用基于PID控制算法的轨迹跟踪策略,通过实时调整控制信号,使机械臂能够准确、快速地跟踪预设的轨迹。
同时,针对机械臂在运动过程中可能出现的扰动和误差,采用鲁棒性较强的控制策略进行优化。
四、运动学仿真为验证六自由度机械臂控制系统的设计效果和运动性能,我们进行了运动学仿真实验。
通过建立三维模型,模拟机械臂在不同任务下的运动过程,并分析其运动轨迹、姿态调整和速度变化等关键参数。
六自由度飞行模拟器体感模拟算法及仿真实现
熊晓华;李维嘉
【期刊名称】《系统仿真学报》
【年(卷),期】2002(0)1
【摘要】针对国内首台直九飞机六自由度模拟器,研究了与之相应的体感模拟算法,并应用MATLAB及VC++建立了模型。
在此模型的基础上,对一组实际飞行数据进行了仿真计算和分析。
结果表明,该算法为充分发挥六自由度模拟器模拟能力提供了一种有效的方法。
【总页数】4页(P27-30)
【关键词】模拟器;体感模拟算法;经典滤波;六自由度
【作者】熊晓华;李维嘉
【作者单位】华中科技大学交通学院
【正文语种】中文
【中图分类】TH139;TP391.
【相关文献】
1.基于ADAMS的六自由度飞行模拟器动力学仿真研究 [J], 刘志星;潘春萍;赵玉龙;吴健楠
2.飞行模拟器六自由度运动平台的仿真研究 [J], 王辉;陈学森
3.对偶四元数在六自由度飞行模拟器的仿真研究 [J], 王辉;朱道扬
4.六自由度飞行模拟器洗出算法参数优化研究 [J], 李炜增; 贾慈力
5.六自由度飞行模拟器洗出算法参数优化研究 [J], 李炜增; 贾慈力
因版权原因,仅展示原文概要,查看原文内容请购买。
飞行汽车的研究发展与关键技术一、本文概述随着科技的不断进步,人们的出行方式也在持续演变。
近年来,飞行汽车的研究与发展日益引起全球范围内的关注。
飞行汽车,作为一种新型交通工具,结合了汽车与航空器的特性,旨在实现城市间的高效、便捷、绿色出行。
本文将对飞行汽车的研究发展进行概述,并深入探讨其关键技术,以期为读者提供全面、深入的了解。
本文将回顾飞行汽车的发展历程,从早期的概念设想到如今的实车试验,分析其在不同历史阶段的特点与挑战。
本文将重点介绍飞行汽车的关键技术,包括但不限于飞行控制系统、动力系统、轻量化材料、安全技术等,这些技术是实现飞行汽车商业化、普及化的重要基础。
本文将展望飞行汽车的未来发展趋势,探讨其在城市交通、应急救援、旅游观光等领域的应用前景。
通过本文的阐述,我们期望能够增进公众对飞行汽车的认识,推动相关领域的交流与合作,共同推动飞行汽车产业的健康发展。
二、飞行汽车的研究发展飞行汽车的研究发展经历了从概念设想到现实原型的漫长过程。
自从汽车和飞机问世以来,人们就开始设想将这两种交通方式结合,形成能够在空中和地面自由穿梭的新型交通工具。
在过去的几十年里,随着科技的不断进步,飞行汽车的研究发展取得了显著的成果。
早期的研究主要集中在概念设计和初步探索阶段。
科学家们通过理论分析和模拟实验,探索了飞行汽车的基本结构和功能要求。
这些研究为后来的实际开发奠定了基础。
随着科技的进步,飞行汽车的研究逐渐进入了实验室阶段。
各种原型机相继问世,这些原型机在设计和功能上不断完善。
例如,一些原型机采用了垂直起降技术,使得飞行汽车能够在狭小的空间内起飞和降落。
同时,还有一些原型机采用了混合动力系统,结合了内燃机和电动机的优点,提高了飞行汽车的能源利用效率。
近年来,随着无人驾驶技术的快速发展,飞行汽车的研究又迈上了新的台阶。
无人驾驶技术使得飞行汽车能够实现自主导航和自主飞行,大大提高了飞行汽车的安全性和便利性。
无人驾驶技术还可以与智能交通系统相结合,实现飞行汽车与地面交通的协同优化,进一步提高交通效率。
飞机设计的基础:六自由度非线性运动方程的建立过程飞机飞行,涉及到力(力矩)平衡、静稳定和静操纵性等一系列的问题。
为了保证飞机的飞行安全和良好的飞行品质,还必须在静品质基础上研究飞机的动态特性。
可以说,飞机的各个系统设计都是围绕着飞机的飞行运动这一基本概念进行的,无论是总体设计、结构设计、气动设计、控制系统设计等等。
今天我们来简单介绍一下飞机运动方程建立的基本思路。
飞行中的歼-20从动力学观点来看,动态特性是研究飞机在外力或外力矩(外界扰动或飞行员操纵)作用下,各个运动参数随时间的变化规律,也就是求解飞机的运动方程,并在此基础上,对动态特性作进一步定量分析。
对于在三维空间运动的刚体飞机,具有6个自由度。
也就是说,如果要完整地描述飞机的运动,需要6个相互独立的微分方程组。
如果再加上空间位置和姿态,完整表征飞机的各个运动参数则需要15个微分方程。
对飞机运动进行受力分析可知,飞机运动要受到重力、发动机推力、空气动力以及三个轴向的滚转力矩作用。
这些力、力矩和运动参数的定义,不在同一坐标系下,因此求解时还需要经过坐标系转换变换到同一坐标系。
六自由度微分方程组加上复杂的坐标系变换,注定了飞机运动方程是复杂的。
飞行中的无人机不过,飞机运动方程能够真实地反映运动过程每一瞬间的情况,是对飞行性能、控制律设计以及运动仿真最基本的依据。
因此,有必要明白运动方程建立的基本方法和具体表现形式。
但是,现代控制理论主要是以传递函数和矩阵形式的状态方程作为分析对象进行研究和设计的。
因此,为了分析飞机稳定性、操纵性、控制律设计的方便,有必要研究建立飞机现行矩阵运动模型的方法。
垂直起降的F-35战机飞机的运动是一个复杂的动力学问题。
如果要全面考虑地球的曲率、燃油的消耗、武器的投射,飞机内部动力系统和操纵系统等机件的相对运动及飞机本身的弹性变形,外力使飞机外形、飞行姿态和运动参数变化等因素,会使飞机运动方程的推导变得极为复杂,并且很难进行解析处理。

飞行器技术的发展现状与应用随着科技的不断进步,飞行器技术也在不断升级。
从最早的热气球,到现在的各种高科技飞机、无人机,飞行器已经成为了人们生活中不可或缺的一部分。
首先看一下飞行器技术的发展现状。
现在,飞行器技术的发展方向主要有三个:一是更高的飞行速度和高空飞行技术;二是更加节能和环保的飞行器技术;三是智能化和自主飞行技术。
就高速飞行技术而言,目前人们已经成功研制出了超音速飞行器,这种飞机可以飞行到5倍音速以上,在很短的时间内飞跃大洋。
而高空飞行技术的发展则主要针对航空航天领域,例如航天飞机、载人飞行器等等。
在环保和节能方面,飞行器技术的发展也取得了很大的进展。
比如,现在的飞机发动机可以大大降低燃油消耗,减少碳排放量;同时,建立起来的飞机回收系统,减少了对环境的污染。
目前,很多航空公司也在研究和实践使用生物燃料来推动飞机的发动机。
智能化和自主飞行技术也是未来飞行器发展的重点方向之一。
随着无人机的技术不断成熟,人们已经成功研制出了一系列具有自主飞行、智能识别障碍物的无人机,用于各种场合的监控、勘测、探测等任务。
接下来,我们来看一看飞行器技术的应用。
飞行器技术的应用实在是太广泛了,几乎涉及到了人类社会的各个领域。
其中,民用领域和军事领域是主要的两个应用方向。
在民用领域,飞机是人们出行的必需品,现在飞机的升降速度和航程都大大提高了,能够将人们带到世界的任何角落。
同时,现在也有很多飞机可以进行货物运输,这种运输方式速度快、安全可靠,适合运输珍贵物品、急需物资等。
在军事领域,飞机的作用更加明显。
军用飞机可以起到侦察、监测、攻击等多种作用,尤其是对于海上陆地的侦察监测,以及战争中的战斗机作战,飞机都起到了至关重要的作用。
同时,无人机也成为了现代战争中重要的“玩具”,用于侦察和攻击。
综上所述,飞行器技术的发展是不以人类意志为转移的历史潮流。
飞行器技术的应用涉及到了各个领域,为人们带来了实实在在的利益和便利。
未来,随着科技的不断进步,飞行器技术也必将迎来新的发展时代,为人们的生活带来更多惊喜。
航空航天领域中的飞行仿真与控制技术研究航空航天领域一直以来都是科技发展的前沿领域之一,飞行仿真与控制技术作为航空航天系统中至关重要的组成部分,对于飞行安全和效率的提升起到了关键性的作用。
本文将从飞行仿真与控制技术的基本概念、应用领域、目前存在的挑战以及未来发展趋势等方面进行探讨。
飞行仿真是指利用计算机技术对航空航天系统中的飞行过程进行模拟和复现,以评估系统性能、培训飞行员或进行飞机设计、飞行控制算法的研究。
飞行仿真技术的核心是建立准确的物理模型、飞行器运动模型和环境模型,并通过逼真的图形界面和感知系统提供真实的飞行体验。
飞行仿真技术在航空航天领域具有广泛的应用。
首先,它被广泛用于飞行员培训中。
在飞行员培训中,通过飞行仿真来模拟各种极限情况、紧急情况和恶劣环境,帮助飞行员提高应对突发事件的能力和自信心。
其次,飞行仿真在飞机设计和飞行控制算法研究中也发挥着重要作用。
通过飞行仿真,可以对飞机的性能和飞控算法进行评估和优化,从而提高飞机的飞行性能和经济性。
此外,飞行仿真还广泛应用于飞行器的虚拟测试和飞行器的运行模拟。
然而,航空航天领域中的飞行仿真与控制技术也面临着一些挑战。
首先,真实性和准确性是飞行仿真技术所面临的主要问题。
在建立飞行仿真的基础模型时,需要考虑到飞机的真实物理特性、空气动力学模型以及各种环境因素的影响,这对计算机模型的建立提出了更高的要求。
其次,飞行仿真的计算复杂度也是一个挑战。
由于飞行仿真需要模拟庞大的飞行器运动学和动力学系统,对计算机的计算能力、内存和处理速度都提出了很高的要求。
此外,飞行控制技术本身也在不断发展,对于飞行仿真技术的要求也不断提高。
未来,航空航天领域中的飞行仿真与控制技术有着广阔的发展前景。
首先,随着计算机技术和图像处理技术的不断进步,飞行仿真的图形效果和真实感将更加逼真,飞行员可以获得更加真实的飞行体验。
其次,虚拟现实技术的普及应用将进一步推动飞行仿真的发展。
虚拟现实技术可以提供更加逼真的虚拟环境,飞行员可以在虚拟现实中进行飞行训练,提高应对各种情况的能力。
摘要汽车驾驶模拟器是一种用于汽车产品开发、“人—车—环境”交通特性研究或驾驶培训的重要工具。
近年来,由于具有安全性高、再现性好、可开发性强、成本低等显著特点,研究开发驾驶模拟器已经成为国内外一个重要发展方向。
本文在查阅国内外大量资料的基础上,结合老师的研究课题主要对六自由度汽车驾驶模拟器液压系统部分进行设计。
六自由度汽车运动模拟器采用液压伺服阀控制液压缸来驱动模拟平台的运动,以实现汽车驾驶模拟器运动姿态模拟。
本文主要进行机械机构的设计、液压伺服系统设计、液压泵站设计和液压缸的设计等。
通过模拟器的机构设计和驱动液压伺服系统设计,结合电气系统能够实现汽车在不同运行状态的模拟,当驾驶员坐在驾驶舱系统的座椅上进行模拟驾驶时,完全能够感受到实际汽车驾驶的各种体感,为实车训练驾驶提供了可替代的模拟平台;本设计也为今后的进一步研究及其在娱乐模拟器、动感电影等产业的实际推广和应用方面奠定了基础。
关键词:汽车驾驶模拟器六自由度运动平台液压伺服系统运动姿态控制AbstractThe Automobile-driving i an important tool which used for the development of auto mobile product and the study of the transportation characteristics of “man-car-environment”or the driver training .In recent years, the study of the automobile-driving simulator used for development has become an important development direction in the world because of the notable characteristics of high safety, well reappearance of scene, easy to develop and low cost.This article is based on searching the large quantity of information about at home and abroad, and combines with the tea cher’s research task which mainly designs the part of 6-dof driving Simulator of hydraulic system .The 6-dof motion simulator adopts valves of hydraulic servo to control actuator to drive the movement of driving simulation platform, and to achieve the movement posture simulation of the automobile driving simulator. This article is mainly about the designing of machine, the system of hydraulic servo, hydraulic pump station, and actuator and so on.According to the designing of agencies of simulator and hydraulic servo system, it can combines the electrical system which can bring out the imitation of cars in different movement conditions, when the driver simulating drive on the seat of cockpit system, you can feel the feeling of driving a true car, and it also offer the simulator platform which can be replaced for true driving training. At the same time, this designing is also establishes for the further researches and the practice extension and use.Keywords:Driving-automobile simulator, 6-dof of motion platform, the system of hydraulic servo, the control of campaign attitude目录1绪论 (1)引言 (1)国内外发展现状 (2)1.2.1国内外研究和发展概述 (2)1.2.2驾驶模拟器的应用和发展 (3)课题任务 (5)论文的主要研究内容 (5)2 运动学及力学分析 (6)六自由度运动模拟器机构位置反解 (6)2.1.1坐标系的建立 (6)2.1.2广义坐标定义 (6)2.1.3坐标变换矩阵 (7)2.1.4液压缸铰支点坐标的确定 (8)2.1.5位置反解 (10)六自由度运动模拟器机构位置正解 (11)静力学分析 (11)3 机械及液压部分设计 (12)运动模拟平台的设计 (12)3.1.1液压缸内壁D活塞杆直径d的计算 (12)3.1.2液压缸壁厚和外径的计算 (14)3.1.3缸盖壁厚的确定 (14)3.1.3液压缸工作行程的确定 (15)3.1.4缸体长度的确定 (15)3.1.5液压系统的计算 (15)液压泵站 (17)铰链的设计 (18)执行机构单元组成 (21)电液伺服控制单元与液压系统 (22)反馈单元 (23)4 电气部分设计 (24)电气原理及接口设计 (24)4.1.1MCS-51系列单片机的引脚及其功能 (24)4.1.2单个电液伺服液压缸位置控制电路设计 (26)4.1.3扩展电路 (26)电气原理图 (27)5 结论 (28)本文结论 (28)本文研究工作的不足 (28)参考文献 (29)致谢 (30)1绪论引言驾驶模拟器是一种用于汽车产品开发、“人-车-环境”交通特性研究或驾驶培训的重要工具。
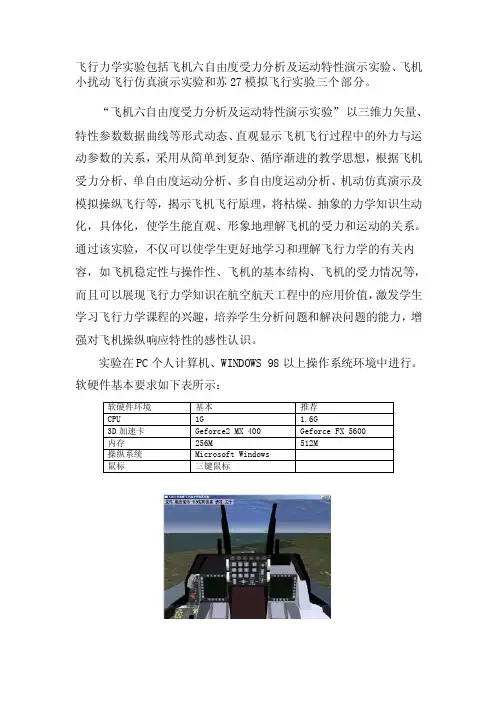
飞行力学实验包括飞机六自由度受力分析及运动特性演示实验、飞机小扰动飞行仿真演示实验和苏27模拟飞行实验三个部分。
“飞机六自由度受力分析及运动特性演示实验”以三维力矢量、特性参数数据曲线等形式动态、直观显示飞机飞行过程中的外力与运动参数的关系,采用从简单到复杂、循序渐进的教学思想,根据飞机受力分析、单自由度运动分析、多自由度运动分析、机动仿真演示及模拟操纵飞行等,揭示飞机飞行原理,将枯燥、抽象的力学知识生动化,具体化,使学生能直观、形象地理解飞机的受力和运动的关系。
通过该实验,不仅可以使学生更好地学习和理解飞行力学的有关内容,如飞机稳定性与操作性、飞机的基本结构、飞机的受力情况等,而且可以展现飞行力学知识在航空航天工程中的应用价值,激发学生学习飞行力学课程的兴趣,培养学生分析问题和解决问题的能力,增强对飞机操纵响应特性的感性认识。
实验在PC个人计算机、WINDOWS 98以上操作系统环境中进行。
软硬件基本要求如下表所示:座舱视角图1 飞机滚转运动中的力、力矩和运动参数显示图2 飞机运动中的力和力矩截图“飞机小扰动飞行仿真演示实验”将飞行力学知识与飞行仿真、模拟相结合,分析、研究飞机在小扰动作用下的模态响应特性。
通过改变操纵输入或增加扰动,可以看出飞机系统在操纵及扰动作用下的响应过程。
通过该实验,可以使学生更好地学习和理解飞行力学稳定性与操纵性的有关内容,增强对飞机飞行品质的感性认识。
小扰动飞行仿真演示实验界面响应曲线图“苏27模拟飞行实验”以苏27战斗机为仿真对象,通过飞行模拟器,进行人在环模拟飞行。
该系统以某先进飞机飞机为背景,采用六自由度非线性全量方程,模拟驾驶员在环的飞机飞行过程和操纵响应过程,可实现“眼镜蛇”等过失速机动飞行。
该系统既可用于教学,也可用于科研,视景效果好,有助于学生和科研人员对飞机飞行现象的理解和掌握。
系统组成如下图所示:(图中箭头方向为信号的传递方向,信号采用UDP协议进行传递。
矿产资源开发利用方案编写内容要求及审查大纲
矿产资源开发利用方案编写内容要求及《矿产资源开发利用方案》审查大纲一、概述
㈠矿区位置、隶属关系和企业性质。
如为改扩建矿山, 应说明矿山现状、
特点及存在的主要问题。
㈡编制依据
(1简述项目前期工作进展情况及与有关方面对项目的意向性协议情况。
(2 列出开发利用方案编制所依据的主要基础性资料的名称。
如经储量管理部门认定的矿区地质勘探报告、选矿试验报告、加工利用试验报告、工程地质初评资料、矿区水文资料和供水资料等。
对改、扩建矿山应有生产实际资料, 如矿山总平面现状图、矿床开拓系统图、采场现状图和主要采选设备清单等。
二、矿产品需求现状和预测
㈠该矿产在国内需求情况和市场供应情况
1、矿产品现状及加工利用趋向。
2、国内近、远期的需求量及主要销向预测。
㈡产品价格分析
1、国内矿产品价格现状。
2、矿产品价格稳定性及变化趋势。
三、矿产资源概况
㈠矿区总体概况
1、矿区总体规划情况。
2、矿区矿产资源概况。
3、该设计与矿区总体开发的关系。
㈡该设计项目的资源概况
1、矿床地质及构造特征。
2、矿床开采技术条件及水文地质条件。
飞行器控制技术研究在现代工业领域,飞行器控制技术是一项至关重要的技术。
随着科技的不断进步和飞行器的不断更新换代,控制技术也在不断升级。
本文将从飞行器控制技术的背景、现状以及未来展望三个方面来阐述这一技术的发展和变化。
一、飞行器控制技术的背景自从人类首次挑战天空的那一刻起,飞行器就成为了人类在空中操作、探索和运输的主要手段之一。
而飞行器的操作,需要精细、稳定和高效的控制技术。
最初的飞行器控制技术是基于机械或运动控制的。
这些技术可以有效地实现基本的控制操作,但随着飞行器的复杂度越来越高,机械控制已经不能满足需求。
随着科技的发展和计算机技术的兴起,数字控制技术开始被广泛应用,并逐渐成为了飞行器控制技术的主流。
现代飞行器的控制系统大多采用数字控制技术,并通过计算机处理和管理,实现对飞行器的精细控制。
二、飞行器控制技术的现状随着技术的发展,飞行器的控制系统也得到了普遍的改进和升级。
现代飞行器控制系统主要可以分为以下几个部分:1.飞行控制系统:这是一种包括飞行控制计算机、飞行控制面板和传感器等硬件和软件的系统,通过运算和数据处理实现对飞行器的控制,包括飞行、引擎控制、导航和通讯等多个方面。
其中,飞行控制计算机是整个系统的核心部分,负责处理所有飞行数据和控制命令。
2.导航系统:导航系统主要包括惯性导航系统、全球定位系统和雷达导航等多个部分。
这些系统可以为飞行器提供准确的位置和航向信息,帮助飞行员更好地进行飞行操作。
3.通讯系统:通讯系统可以让飞行控制员、飞机驾驶员和其他机组人员实现信息交流和通信。
通讯系统包括无线电通讯、气象报告、交通管制等多个方面。
目前,现代飞行器控制系统已经发展到了一个相对成熟的阶段。
控制系统的精密程度和操作效率已经达到了前所未有的高度,不仅能够实现正常的飞行操作,还能够有效地应对紧急情况。
三、未来展望虽然现代飞行器控制技术已经相当成熟,但未来的发展方向和技术变革还有很多值得关注的地方。
以下是几个可能的发展方向:1.自主飞行技术:自主飞行技术是指利用人工智能技术让飞行器自主飞行,避免了对人的依赖。
哈尔滨理工大学学报JOURNAL OF HARBIP UNIPERSIFY OF SCIFNCE AND TECHNOLOGY第26卷第1期2021年2月Vol. 26 No. 1Fed. 2021六自由度Stewart 平台参数化建模及优化方旭光1 张为1 郑敏利1 陈金国2,朴明健1(1.哈尔滨理工大学机械动力工程学院,哈尔滨154080;4.莆田学院机电工程学院,福建莆田381140)摘要:飞行模拟器是一种训练飞行员的地面模拟设备,能够逼真地再现真实环境中飞机的飞行状态,具有精度高、承载能力大、安全可靠、使用灵活等优*。
飞行模拟器通常采用六自由度StewaP 平台,其运动特性是影响本身性能的关键指标。
首先建立六自由度StewaP 平台的参数化模型,设计其运动轨迹并进行试验研究,分析多种结构参数并确定平台的基本尺寸;其次根据基本尺寸建立完整的三维模型,并分析其空间运动状态;最后对其进行运动学、动力学仿真分析并研究整体的性能。
六条支腿的伸缩量轨迹*和五次多项式拟合曲线基本重合,其伸缩运动符合五次多项 式规律,保证了速度和加速度不发生较大的突变,从而确保了上运动平台的稳定性。
关键词:飞行模拟器;StewaP ;参数化;运动学;动力学DOI : 15.15938/j. jhusP 4221.41.419中图分类号:TH122文献标志码:A 文章编号:1053-2683(2521)51-0566-11Parametric Modeling and Optimization of Six-DOF Stewart PlatformFANG Xr-guang 1, ZHANG Wei 1, ZHENG Min-H 1, CHEN Jin-guo 1, PI A O Ming-jian(1. School of Mechanical and Power EnvineePnv : Harbin University of Science and Technolovy : Harbin 130085 , Chino ;2. Institute of Mechanical and Electrical EnyineePno, Putian Univevity ,Putian 381195 , Chino)Abstract : Flight simulator is a yaand simulator for training pilots. It cun yiUcXy apaXbcy Oo aight status ofaircraft in real enviaxment. It has tho advantayos of high uccurucy , larpo cuoyiny capucita , safetf and alUPiUty ,and I —ibliUty. Flight simulator usuUly usos SU-DOF ( siv U —ao of freedom , Six-DOF) Stewart platOrm , and itsmotion characteostics are tho key indicators affecting Us perfovnanco. FUsOy, tho parameteozed model of tho SU i DOF StewaP plaOovn is estaPlished , its trajectop is desiyned and tested , and vaooxs stmctnral parameters areanalyzed and tho basic dimensions of tho platfovn are Uetevnined ; suondly , a completo threo-dimensional model isostadlished xccordiny to tho stmctnral parameters : and its spatial motion state is analyzed ; finUly , tho kinematicsand Uyyamics simulation analysis is curoed out and tho ovarall peOormanco is stubied. Tho trajectory points of tho six Tys are buUUly coinciput with tho fitting cuao of tho quintic polyyomial , and tho movement of tho six Tys is in xccordanco with tho quintic polyyomial Tw , which ensuros that tho speed and uccoTratiox do no- huva larpomutations : thus ensuony tho sOdiUto of tho uppor moving platOrm.Keywois : aight simiOTor ; StewaP ; parameteozatiox ; kinematic ; Uyyamics收稿日期:2519 -54 -58基金项目:国家自然科学基金(5175146);国家自然科学基金(51775 1 0CAD/CAM福建省高校工程研究中心开放课题(K251759).作者简介:方旭光(1992—)男,硕士研究生;张 为(1977—),男,博士,教授.通信作者:郑敏利(1994—),男,博士,教授,E-ma2:zh —vmmdl63@168. com.第1期方旭光等:六自由度Stewart平台参数化建模及优化67 0引言在实际交通工具上训练驾驶技术时,一般会受天气、场地、、的导致训练实现,甚至出现极其的状况。
使用虚拟仿真技术的飞行模拟系统设计与实现飞行模拟系统是一种利用虚拟仿真技术模拟飞行环境、飞行器性能和飞行过程的系统,可以帮助飞行员进行训练、测试和研究等工作。
本文将就使用虚拟仿真技术的飞行模拟系统的设计与实现进行探讨。
首先,飞行模拟系统的设计需要考虑到飞行环境的虚拟仿真。
飞行环境包括空气动力学、地形、天气等因素,这些因素对飞行过程有着重要影响。
因此,系统需要准确地模拟这些因素,以保证飞行训练的真实性和可靠性。
在设计中,可以利用气动力学和数值计算方法来模拟空气动力学,并引入地图数据、气象数据等来模拟地形和天气。
同时,系统还需要考虑飞行器的性能特征,并结合真实数据进行精确建模。
其次,飞行模拟系统的设计还需考虑到飞行器的各种系统模拟。
飞行器的各种系统,如发动机、通信、导航等,对飞行过程起着重要作用。
在设计中,可以利用控制理论和模型建立技术,模拟这些系统的工作原理和效果。
以发动机为例,可以考虑燃油供给、排气、温度等因素,以实现对发动机性能的准确模拟。
同时,还可以结合虚拟仪表和虚拟显示技术,将各种系统的工作情况以图像的形式呈现给飞行员,让其能够直观地感受到系统的工作状态。
第三,飞行模拟系统的设计需要考虑到飞行员的操作与感受。
飞行员的操作是飞行模拟系统的关键环节,因此系统需要具备良好的交互性和操作性。
在设计中,可以利用人机工程学和虚拟现实技术来实现飞行员与系统的交互。
例如,可以设计真实感触摸屏、手柄等操作装置,并利用虚拟现实技术实时呈现飞行场景。
此外,还可以考虑引入生物反馈技术,通过震动、压力等手段,增强飞行员在模拟飞行中的真实感受。
最后,飞行模拟系统的实现需要考虑到技术的可行性和可靠性。
飞行模拟系统是一个复杂的工程项目,需要涉及多种技术的应用。
在实现中,可以采用模块化设计思想,将系统划分为多个子系统,分别进行开发和集成。
同时,还需要注意技术的可行性,即所选用的技术是否能够满足系统设计的需求。
在实施过程中,还需要进行充分的测试和验证,以保证系统的可靠性和稳定性。
第14卷第1期 2002年1月 系统仿真学报
JOURNAL 0F SYSTEM SIMULATION V_01.14 No.1
Jan.20o2 文章编号:1004-731X(2002)01—0084-04
飞行模拟器六自由度运动系统的关键技术及研究现状 杨灏泉,赵克定,吴盛林,曹健 f哈尔滨工业大学机电学院,哈尔滨150001) 摘要:作为飞行模拟器载体的并联六自由度运动系统是飞行模拟器非常重要的组成部分 其本 质是由数字计算机实时控制并能提供俯仰、滚转、偏航、升降、纵向和侧向平移的六自由度瞬时 过载仿真设备。本文从研制者的角度出发,评述了研制高性能飞行模拟器六自由度运动系统所需 的关键技术及其国内外的研究进展。结合样机设计与制造的实践经验,提出亟需解决的若干理论 与技术问题,以及解决这些问题的可行途径。 关键词:飞行模拟器;六自由度平台;机构学;驱动元件;控制策略 中图分类号:TP391.9;TP273 文献标识码:A
Key Technologies and Developing State of 6-DOF Motion System f0r Flight Simulator YANG Hao.quan,ZHA0 Ke.ding, Sheng.1in,CA0 Jian (School of Mechatronic Engineering,Harbin Institute ofTechnology,Harbin 150001,China) Abstract:As motion-base of flight simulator,parallel 6-DOF motion system is one of the chief part in flight simulator.Its motion nature is one kind instantaneous overload—simulating vehicle,which can provide pitch,roll,yaw,heave(vertica1), surge(1ongitudina1)and sway(1atera1)motion.In this paper,the state—of-the—art and the key issues of6一DOF motion system for flight simulator ale briefly addressed on the designer’S standpoint.And at the salne time,in conjunction with the practical experience of design and manufacture,some desiderative theories and technique problems are proposed.In addition,we’U discuss some viable developing approaches as wel1. > Keywords:flight simulator;6一DOF platform;machinery;actuator;control strategy
引 言 飞行模拟器是在地面模拟飞行器在空中飞行和地面运 动的设备,是典型的人在回路实时仿真系统和虚拟现实的应 用实例【l】。目前,飞行模拟技术已成为多快好省地达到研究 飞行和训练飞行目的的最佳途径甚至是唯一途径。作为飞行 模拟器载体的并联六自由度运动系统是飞行模拟器非常重 要的组成部分,它能提供飞机运动过程中飞行员能感觉到的 瞬时过载动感,重力分量的持续感及部分抖动冲击信息,使 飞行仿真更加逼近真实飞行。其本质是由数字计算机实时控 制并能提供俯仰、滚转、偏航、升降、纵向平移和侧向平移 的六自由度瞬时过载仿真设备。因此,运动系统性能的优劣 将直接关系到飞行模拟的逼真度。而并联六自由度运动系统 的机构学理论、关键零部件及其控制策略等的研究,是进行 运动系统的结构优化设计,提高飞行模拟器运动性能的关键 技术。
1飞行模拟器六自由度运动系统的特点 1965年,D.Stewart提出将并联六自由度机构用作训 练飞机驾驶员的飞行模拟器【 ,因而这种由上下平台和6根
收稿日期:2000-12—07 惨回日期:2001—03.O1 作者简介:橱蠢泉(1974一),男,博士,研究方向为飞行模拟器运动系统及 流体传动控制方面的研究,发表学术论文近十篇。
驱动杆组成的并联机构也被称为“Stewart机构”。图1即为 用于飞行模拟器的电液伺服六自由度运动平台。与串联机构 相比,这种结构形式具有很大的优越性:结构布局合理、精 度高、刚度大、运动速度高。因此除了用于飞行模拟器等高 速、大负载的各类运动模拟器以外,近年来,还被广泛地应 用于机器人、并联机床、飞船对接器以及各种精密仪器测试 设备等【31。 从设计的角度看,飞行模拟器六自由度运动系统在运 动学、动力学等机构学理论方面与并联机床、并联机器人、 动感娱乐模拟器等是相同的。但从结构特点、控制精度、响 应快速性等方面来看,它们仍有较大的差别。并联机床、并
分藏块T ̄nCe基础平台 图1飞行模拟器六自由度运动平台
维普资讯 http://www.cqvip.com 第14卷第1期 杨灏泉等:飞行模拟器六自由度运动系统的关键技术及研究现状 ·85· 联机器人等操作器较侧重于位置、速度的精度要求,而对系 统响应的快速性要求不高,结构尺寸和承载能力也不大。而 对飞行模拟器,则更为关心的是平台的加速度以及突发加速 度变化率的控制精度,尤其是平台洗出(Washout)运动时系统 的低速平稳性,而且对系统响应快速性(频宽)的要求也是一 项非常重要的指标。此外,由于飞行模拟器的运动空间、载 荷和运动加速度都比较大,因而对运动平台承载能力、工作 空间方面的要求也比较高。只有满足这些高性能运动指标的 要求,才能拓宽所能仿真的运动信息,获得很好的运动平滑 性,实现高逼真度的实时仿真。 2 飞行模拟器六自由度运动系统的机构学理论 飞行模拟器六自由度运动系统的机构学理论属于空间 多自由度多环机构学理论的新分支,它是随着对Stewart机 构的研究而发展起来的。其研究内容可分为三大组成部分, 即机构结构学、机构运动学、机构动力学。自1965年D. Stewart提出并建造了第一个飞行模拟器六自由度平台后, 各国学者对以Stewart机构为代表的并联机构的机构学理论 研究投入了极大的热情。早期的研究主要集中于并联机构的 基本理论方面,如机构结构学、工作空间等。随着并联机构 应用的发展,目前的研究正逐渐向一些具体的实际问题发 展,如运动学中的位置正解、结构校验等。 图2 Stewart平台结构简图 六自由度并联机构的机构结构学研究的主要任务是揭 示机构的结构组成规律、机构的拓扑结构特征以及它们与机 构运动学、动力学特性之间的内在联系,并进行机构结构类 型的优选,构思发明新机构。这部分也是该机构学理论中研 究得较为成熟的部分,各国学者曾先后提出了6.SPS平台机 构(即传统的Stewart机构)的各种变形机构(如6.SPS单三角、 双三角机构等)以及6.RSS、6.PSS、6.TPS等多种六自由度 并联平台机构。但无论是飞行模拟器,还是并联机器人、并 联机床以及各种运动模拟器,基于机构的制造、使用、经济 性等因素,大都采用6-TPS或传统的6-SPS机构,其结构简 图如图2所示。且目前飞行模拟器六自由度平台在机构结构 方面研制的关键点主要在于设计出加工、装配工艺性好,运 动范围大、精度高的球铰、十字铰等关节铰链组件。在这方 面,加拿大CAE公司、德国力士乐(Rexroth)公司、日本科 学技术厅航空宇宙技术研究所最新研制的铰链组件都相当 典型。 六自由度并联机构运动学是目前并联机构学中研究的 重点,其主要研究内容有机构的位置、速度、加速度分析(即 正解、逆解),此外还包括机构的工作空间、奇异位形问题、 运动误差及结构校验、优化等方面。六自由度运动平台的位 置分析是求解机构的输入与输出构件的关系,即位置逆解与 正解,这是六自由度运动平台运动分析的最基本的任务,也 是机构速度、加速度、误差分析、工作空间分析、动(静)力 学和机构综合的基础,同时也是运动平台能实现精确位姿控 制的关键。与串联机构相反,并联机构的位置逆解较简单, 而位置正解由于平台的位置量与各分支的伸缩量间具有非 线性关系,且具有多解性【4】,因此求解较为困难,是并联机 构研究的热点问题之~。目前,对六自由度并联平台正解求 解的代表性方法主要有:1.数字迭代法[5】;2.代数法与数 字迭代法的结合[ 】;3.基于附加位移传感器的纯代数法[7】. 数字迭代法方法简单,计算精度较高,但主要问题是算法的 收敛性未知,且收敛速度强烈依赖于初值的选取。代数法与 数字迭代法相结合的特点是能降低迭代搜索的维数,提高迭 代效率。基于附加位移传感器的纯代数法是近年来正解研究 中的重点,该方法在附加一个或三个位移传感器后,在一定 的约束条件下能求出6.6并联机构的封闭运动学正解。但实 现该方法的机械结构较为复杂,目前在飞行模拟器运动系统 中尚未见已有应用的报道。并联机构的工作空间及奇异位形 问题也是目前运动学中的研究热点,其中比较有特点的是 Gosselin用圆弧相交的方法求出了最大可达空间【8】。Hunt在 1983年提出并联机构的奇异点问题,并对其进行了一般性 研究。国内,黄田教授以并联机床为目标,对并联机构的理 论作了进一步的发展,提出了并联机床工作空间的高效率数 值解法。燕山大学的黄真教授发展了对多种并联机构发生一 般线性从奇异的判别条件。 并联机构的动力学研究包括机构的动力学模型建立、受 力分析、惯性力计算、动力平衡、动力学响应等方面,它们 在六自由度运动平台的设计与控制中起到非常重要的作用, 是确定平台主要结构参数的基础。其中动力学模型的建立是 诸多动力学问题中最重要的一个方面。由于并联机构的复杂 性,其动力学模型通常是一个多自由度、多变量、高度非线 性、多参数耦合的复杂系统。目前,并联机构动力学的建模 方法主要有Newton.Euler方法、Lagrange方法、虚功方法 和Kane方法。这些方法在工程实际中均有应用,目前研究 的重点是寻求一种动力学方程呈显式,系统性强,降维、易 于求解且计算量较小的动力学模型。
3 飞行模拟器六自由度运动系统的驱动方式
并联六自由度运动系统的驱动方式在很大程度上决定 了运动系统的承载能力、运动精度、快速性等性能指标,也 是运动系统中关键技术之一。