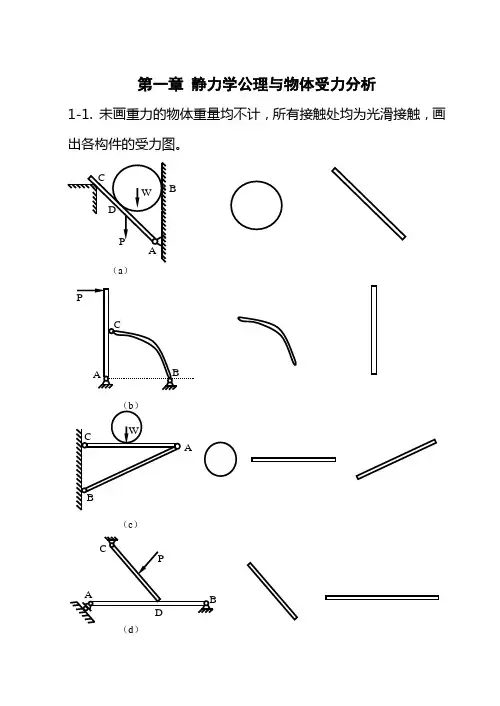
第6章刚体的基本运动
- 格式:doc
- 大小:497.50 KB
- 文档页数:12
刚体运动学的基本原理与公式引言刚体运动学是物理学中一个重要的分支,研究物体在空间中的运动规律。
通过分析刚体的运动,我们可以揭示物体在空间中的位置、速度和加速度等关键信息。
本文将介绍刚体运动学的基本原理和公式,帮助读者更好地理解和应用这一领域的知识。
一、刚体的定义与特性刚体是指在运动过程中形状和大小不发生变化的物体。
与之相对,我们称之为非刚体的物体在运动过程中可能发生形变。
刚体的特性包括质量、形状、大小和位置等。
在刚体运动学中,我们主要关注刚体的位置、速度和加速度等运动参数。
二、刚体的运动描述为了描述刚体在运动中的位置和运动状态,我们引入了坐标系和参考点的概念。
坐标系用于确定刚体的位置,而参考点则是确定刚体位置的基准点。
在刚体运动学中,我们通常使用笛卡尔坐标系来描述刚体的运动。
通过选择合适的参考点,我们可以确定刚体的位置矢量。
三、刚体的位移、速度和加速度刚体的位移是指刚体在运动过程中,由一个位置变换到另一个位置的变化量。
刚体的速度是指刚体在单位时间内所发生的位移。
刚体的加速度是指刚体速度的变化率,即单位时间内速度的变化量。
在刚体运动学中,我们可以通过求导数的方法来计算刚体的速度和加速度。
四、刚体运动的基本公式刚体运动学中有一些基本的公式,可以帮助我们计算刚体的运动参数。
其中,最基本的公式是位移公式,即s = v * t,其中s表示位移,v表示速度,t表示时间。
通过这个公式,我们可以计算刚体在给定时间内的位移量。
另外,我们还可以使用速度公式和加速度公式来计算刚体的速度和加速度。
五、刚体运动的特殊情况在刚体运动学中,存在一些特殊的情况,需要特别注意。
例如,当刚体做匀速直线运动时,速度和加速度都是常量。
当刚体做匀加速直线运动时,速度是随时间线性增加的,而加速度是常量。
此外,当刚体做曲线运动时,速度和加速度的方向可能随时间变化。
六、刚体运动学的应用刚体运动学在实际生活中有着广泛的应用。
例如,在机械工程中,我们可以利用刚体运动学的原理来设计机械装置和机器人。
刚体运动的基本原理刚体运动是物体在空间中做整体性的运动,不发生形变的运动。
刚体运动的基本原理可以通过以下几个方面来解释:一、质点的运动质点可以看作是质量无限大的一个点,它不发生形变,仅产生平移运动。
质点的平移运动可以用牛顿第一定律来描述,即物体在不受外力作用时将保持静止或者匀速直线运动。
这是因为质点不受力的影响,所以它的速度和位置都不会改变。
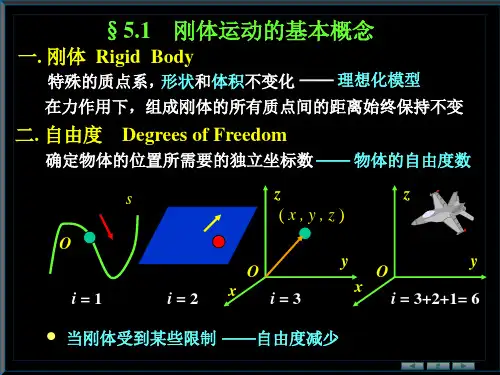
二、刚体的自由度刚体在空间中的运动由其自由度决定。
自由度是指刚体能够独立运动的最小数量。
对于一个刚体而言,它的自由度取决于它的维度。
在三维空间中,一个刚体有6个自由度,分别为三个平移自由度和三个转动自由度。
三、刚体的平移运动刚体的平移运动是指它在空间中沿着直线运动,整体上保持不变。
刚体的平移运动可以由质点的运动来描述。
当一个刚体受到一个外力时,该外力会作用在刚体的重心上,使得刚体产生平移运动。
刚体的平移加速度与作用在刚体上的合力成正比,与刚体的质量成反比。
四、刚体的转动运动刚体的转动运动是指它在空间中绕轴线旋转,整体上保持不变。
刚体的转动运动可以由刚体的转动惯量来描述。
转动惯量是刚体旋转惯性的量度,与刚体的质量分布以及轴线的位置有关。
当一个刚体受到一个力矩时,该力矩会使刚体产生转动运动。
刚体的转动加速度与作用在刚体上的合力矩成正比,与刚体的转动惯量成反比。
五、刚体的复合运动刚体可以进行平移和转动的复合运动。
当一个刚体受到既有平移又有转动的外力时,刚体既会发生平移运动,也会发生转动运动。
刚体的平移和转动是相互独立的,但它们会同时发生。
六、刚体碰撞的基本原理当两个刚体碰撞时,根据动量守恒定律和动能守恒定律,可以得到碰撞前后刚体的动量和动能之间的关系。
在完全弹性碰撞中,刚体在碰撞过程中既满足动量守恒定律,也满足动能守恒定律。
在非完全弹性碰撞中,刚体在碰撞过程中会发生能量损失,动能不守恒。
总结:刚体运动的基本原理包括质点的运动、刚体的自由度、刚体的平移和转动运动,以及刚体碰撞的原理。
刚体转动知识点总结1. 刚体的定义在物理学中,刚体是一个理想化的概念,用来描述物体的力学性质。
刚体是一个不会发生形变的物体,它具有不变的形状和大小。
在刚体转动的过程中,可以忽略物体的形变,只需考虑刚体的质量分布和外力作用情况。
2. 转动定律在刚体转动的过程中,存在着转动定律,即牛顿第二定律在转动运动中的应用。
根据转动定律,刚体的角加速度与作用在刚体上的合外力成正比,与刚体的转动惯量成反比。
转动定律可以用数学公式表示为:\[ \tau = I \alpha \]其中,$\tau$ 表示合外力矩,$I$ 表示刚体的转动惯量,$\alpha$ 表示刚体的角加速度。
3. 角动量角动量是描述刚体转动运动的物理量,它是刚体的转动惯量和角速度的乘积。
角动量可以用数学公式表示为:\[ L = I \omega \]其中,$L$ 表示角动量,$I$ 表示刚体的转动惯量,$\omega$ 表示角速度。
4. 转动惯量转动惯量是描述刚体对转动运动的惯性大小的物理量,它反映了刚体的质量分布对其转动运动的影响程度。
转动惯量的计算需要考虑刚体的形状和质量分布,通常需要使用积分来进行计算。
5. 转动运动方程刚体转动运动的规律可以通过转动运动方程来描述,转动运动方程可以表示为:\[ \tau = \frac{dL}{dt} \]其中,$\tau$ 表示合外力矩,$L$ 表示角动量,$t$ 表示时间。
转动运动方程描述了刚体的转动运动受到外力矩作用时角动量的变化规律。
6. 刚体的转动运动在刚体的转动运动中,需要考虑刚体的转动惯量、角速度、角加速度等物理量。
刚体的转动运动可以在直角坐标系下进行描述,通过使用牛顿运动定律和转动运动方程来分析刚体的转动运动规律。
7. 平行轴定理和垂直轴定理在计算刚体的转动惯量时,可以利用平行轴定理和垂直轴定理来简化计算过程。
根据平行轴定理和垂直轴定理,刚体绕与其质心平行(或垂直)且距离为$d$的轴转动的转动惯量可以表示为:\[ I = I_{\text{CM}} + Md^2 \]其中,$I$ 表示绕过质心平行(或垂直)轴转动的转动惯量,$I_{\text{CM}}$ 表示绕质心转动的转动惯量,$M$ 表示刚体的质量,$d$ 表示轴与质心的距离。
第6章 运动学基础一、是非题(正确的在括号内打“√”、错误的打“×”)1.动点速度的大小等于其弧坐标对时间的一阶导数,方向一定沿轨迹的切线。
( √ ) 2. 动点加速度的大小等于其速度大小对时间的一阶导数,方向沿轨迹的切线。
( × ) 3.在实际问题中,只存在加速度为零而速度不为零的情况,不存在加速度不为零而速度为零的情况。
( × ) 4.两个刚体做平动,某瞬时它们具有相同的加速度,则它们的运动轨迹和速度也一定相同。
( × ) 5.定轴转动刚体的角加速度为正值时,刚体一定越转越快。
( × ) 6.两个半径不等的摩擦轮外接触传动,如果不出现打滑现象,两接触点此瞬时的速度相等,切向加速度也相等。
( √ )二、填空题1. 描述点的运动的三种基本方法是矢径法、直角坐标法和自然坐标法。
2. 点做圆周运动,加速度由切向加速度和法向加速度组成,其中切向加速度反映了速度大小随时间的变化率,方向是沿圆周的切线;法向加速度反映了速度的方向随时间的变化率,方向是沿圆周的法线。
3. 质点运动时,如果d d st和22d d s t 同号,则质点做加速运动,反之则做减速运动。
4. 刚体运动的两种基本形式为平动和定轴转动。
5. 刚体平动的运动特征是刚体在运动的过程中其内的任一直线始终和原来的位置平行。
6. 定轴转动刚体上点的速度可以用矢积表示,它的表达式为r ωv ⨯=;刚体上点的加速度可以用矢积表示,它的表达式为v ωr εa ⨯+⨯=。
7. 刚体绕定轴转动时,在任一瞬时各点具有相同的角速度和角加速度,且各点轨迹均为 圆周。
8. 定轴转动刚体内点的速度分布规律为任何一条通过轴心的直径上各点的速度,若将速度矢的端点连成直线,此直线通过轴心。
9. 半径均为R 的圆盘绕垂直于盘面的O 轴做定轴转动,其边缘上一点M 的加速度如图6.23所示,试问两种情况下圆盘的角速度和角加速度的大小分别为:图(a):=ω0;=εRa。
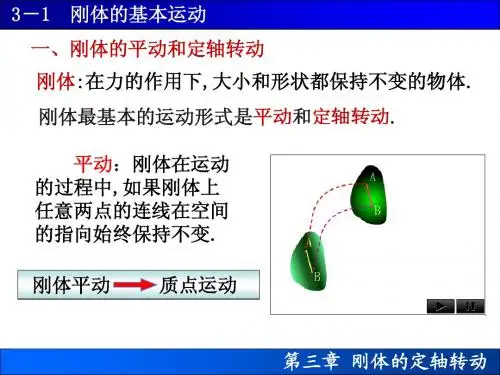
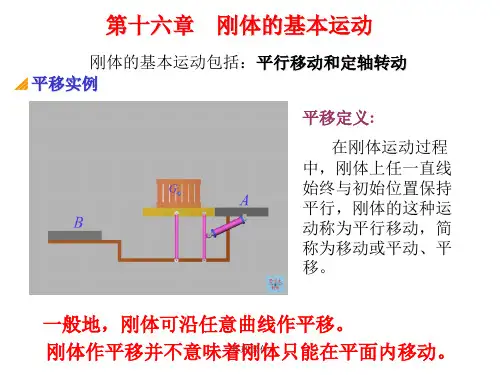
第6章 刚体的基本运动在上一章的基础上本章的研究对象是刚体,学习的内容是刚体的平行移动和定轴转动,它构成刚体的两个基本运动,也是研究刚体复杂运动的基础。
6.1 刚体平行移动工程实际中,如气缸内活塞的运动,打桩机上桩锤的运动等等,其共同的运动体点是在运动过程中,刚体上任意直线段始终与它初始位置相平行,刚体的这种运动称为平行移动,简称平移。
如图6-1所示车轮的平行推杆AB 在运动过程中始终与它初始位置相平行,因此推杆AB 作平移。
确定平移刚体的位置和运动状况,只需研究刚体上任意直线段AB ,A 、B 两点的矢径为A r 和B r ,A 、B 两点间的有向线段AB r 之间的关系为AB B A r r r += (6-1)图6-1图6-2由平动定义知AB r 为恒矢量,A 、B 两点的轨迹只相差AB r 的恒矢量,即A 、B 两点的轨迹形状相同。
式(6-1)对时间求导,得B A v v = (6-2) B A a a = (6-3)结论:(1)平移刚体上各点的轨迹形状相同;(2)在同一瞬时平移刚体上各点的速度相等,各点的加速度相等。
因此,刚体的平行移动可以转化一点的运动来研究,即点的运动学。
6.2 刚体的定轴转动工程实际中绕固定转动的物体很多,如飞论、电动机的转子、卷扬机的鼓轮、齿轮等均绕定轴转动。
这些刚体的运动特点是:在运动过程中,刚体上存在一条不动的直线段,刚体的这种运动称为刚体的绕定轴转动,简称转动,转动刚体的不动的直线段称为刚体的转轴。
6.2.1转动刚体的运动描述如图6-3所示,选定参考坐标系oxyz ,设z 轴与刚体的转轴重合,过z 轴作一个不动的平面0P (称为静平面),再作一个与刚体一起转动的平面P (称为动平面),令静平面0P 位于oxz 面上,初始瞬时这两个平面重合,当刚体转动到t 瞬时,两个平面间的夹角为ϕ,ϕ称为刚体的转角,用来描述转动刚体的代数量。
按照右手螺旋法则规定转角ϕ的符号,其单位为弧度(rad )。
刚体定轴转动的运动方程是f(t)=ϕ (6-4)f(t)是时间t 的单值连续函数。
角速度是描述刚体转动快慢的物理量,用ω表示,即转角ϕ对时间t 的导数,)或ϕϕ==(dtd ω (6-5) 单位为弧度/秒(rad/s ),它是代数量。
当ϕ∆>0,ω>0;ϕ∆<0,ω<0。
角加速度是角速度ω对时间t 的导数,用α表示)(或ϕϕα ====ωdtd dt d ω22 (6-6) 单位为弧度/秒2(2rad/s ),它是代数量。
当α与ω同号时,刚体作加速转动;当α与ω异号时,刚体作减速转动。
工程中常用转速表示转动刚体的转动快慢,即每分钟转过的圈数,用n 表示,单位为转/分(m in)r/,角速度与转速的关系是30602nπn πω==(rad/s ) (6-7) 注意:转动刚体的运动微分关系与点的运动微分关系有着相似之处,望初学者加以比较。
6.2.2转动刚体上各点的速度和加速度当刚体作定轴转动时,刚体上各点均作圆周运动,故在刚体上任选一点M ,设它到转轴的距离为R ,如图6-4所示,当刚体转过ϕ角时 ,点M 的弧坐标为ϕR s = (6-8)图6-5式(6-8)对时间t 求导得点M 的速度为ωR v = (6-9) 其速度分布如图6-5所示。
式(6-9)对时间t 求导得点M 的切向加速度为αR a τ= (6-10)点M 的法向加速度为222ωR Rω)R (R v a n === (6-11)点M 的全向加速度为4222222ωR )ωR ()R (a a a n +=+=+=αατ (6-12)方向2ωa a tan n αθτ==(6-13) 其加速度分布如图6-6所示。
结论:(1)在同一瞬时,转动刚体上各点的速度v 和加速度a 的大小均与到转轴的垂直距离R 成正比;(2)在同一瞬时,各点速度v 的方向垂直与到转轴的距离R ,各点加速度a 的方向与到转轴的垂直距离R 的夹角θ都相等。
6.3 点的速度和加速度的矢量表示首先建立角速度的矢量概念,按照右手螺旋法则定义角速度的矢量表示为o图6-4图6-6k ωω= (6-14) 其中,k 为转轴z 的单位矢量,如图6-7a 所示。
刚体上任意一点M 的矢径r 、角速度ω和速度v 的矢量表示为r ×ω=v (6-15)同理,对于定轴转动刚体,定义角加速度的矢量概念,k ωαα== (6-16) 式(6-15)对时间t 求导得点M 加速度的矢量表示为v ωr αa ⨯+⨯= (6-17)如图6-7b 所示,式(6-17)右边第一项为切向加速度,第二项为法向加速度,即r αa τ⨯= v ωa n ⨯= (6-18) 结论:(1)作定轴转动刚体上任意一点的速度等于角速度矢与矢径的矢量积;(2)作定轴转动刚体上任意一点的切向加速度等于角加速度矢与矢径的矢量积,法向加速度等于角速度与速度的矢量积。
(a)(b)图6-7图6-8例题6-1如图6-8所示,曲柄OA 绕O 轴转动,其转动方程为24t =ϕ(rad),BC 杆绕C 轴转动,且杆OA 与杆BC 平行等长,OA =BC =0.5m ,试求当s t 1=时,直角杆ABD 上D 点的速度和加速度。
解:由于OA 与BC 平行等长,则直角杆ABD 作平移,因此由平移的定义知:计算D 点的速度和加速度,只需计算A 点的速度和加速度即可。
曲柄OA 的角速度由式(6-5)得t dtd ω8==ϕ(rad/s )曲柄OA 的角加速度由式(6-6)得8==dtd ωα(rad/s 2)当s t 1=时:(1)直角杆ABD 上D 点的速度 由式(6-9)得4850=⨯==.ωOA ωR =v (m/s )方向垂直OA 指向角速度方向。
(2)直角杆ABD 上D 点的加速度 切向加速度由式(6-10)得4850=⨯==.OA αR =a τα(m/s 2) 法向加速度由式(6-11)得32850222=⨯==.ωOA ωR =a n (m/s 2)全向加速度由式(6-12)得:25323242222.=a +a =a n =+τ(m/s 2)全向加速度与法线间的夹角由式(6-13)得12508822.ω=a a =tan n ==αθτ其中o .137=θ。
例题6-2鼓轮O 轴转动,其半径为m 20.R =,转动方程为t t 42+-=ϕ(rad),如图6-9所示。
绳索缠绕在鼓轮上,绳索的另一端悬挂重物A ,试求当s t 1=时,轮缘上的点M 和重物A 的速度和加速度。
图6-9解:鼓轮O 轴转动的角速度由式(6-5)得42+-==t dtd ωϕ(rad/s )鼓轮O 轴转动的角加速度由式(6-6)得2-==dtd ωα(rad/s 2)当s t 1=时:(1)点M 的速度和加速度 由式(6-9)得40220..ωR =v M =⨯=(m/s ) 方向垂直R 指向角速度方向。
切向加速度由式(6-10)得40220.)(.αR =a M τ-=-⨯=(m/s 2)法向加速度由式(6-11)得8022022..ωR =a M n =⨯=(m/s 2) 全向加速度由式(6-12)得:8944080402222...=a +a =a nM M M =+τ(m/s 2)全向加速度与法线间的夹角由式(6-13)得502222.ω=a a =tan n =-=αθτ其中o .5726=θ。
(2)重物A 的速度和加速度 重物A 的速度为40.=v v M A =(m/s )方向铅锤向下。
重物A 的加速度为40.=a a M τA -=(m/s 2)与速度方向相反,作减速运动。
例题6-3杆OB 绕O 轴转动,并套在套筒A 中,套筒A 在竖直滑道中运动,如图6-10所示。
已知套筒A 以匀速m /s 1=v 向上运动,滑道与O 轴的水平距离为m 40.l =,试求当杆OB 与水平线的夹角o 30=ϕ时,导的杆OB 的角速度和角加速度。
图6-10解:由几何关系得lvttan =ϕ (1) 由式(1)解得杆OB 绕O 轴转动的转动方程为lvttan 1-=ϕ (2)对式(2)求导的杆得OB 的角速度和角加速度为21)l(l v ω+==ϕ(3) 22322]1[2]1[2)lvt (t )l v ()l vt (l v )l vt (l v ωα+-=+-== (4) 当o 30=ϕ时,由式(1)得时间334030.v tan l t o ==代入式(3)和式(4),则杆OB 的角速度和角加速度为875134011401122.).(.)l vt (l v ω=⨯+=+==ϕ (rad/s ) n 图6-11064]34034011[33404012]1[2223223.)..(.).()l (t )l v (ωα-=⨯⨯+-=+-== (rad/s 2) 例题6-4变速箱由四个齿轮构成,如图6-11所示。
齿轮Ⅱ和Ⅲ安装在用一轴上,与轴一起运动,各齿轮的齿数分别为361=z 、1122=z 、323=z 和1284=z ,如主动轴Ⅰ的转数14501=n (r/min),试求从动轮Ⅳ的转数4n 。
解:在机械中常用齿轮作为传动部件,例如本题中变速箱,是由多组齿轮构成的,起到增速和减速的作用。
在齿轮相互啮合处其速度应相等。
如本例中的主动轮Ⅰ和从动轮Ⅱ,设其角速度分别为1ω、2ω,齿轮的半径分别为1r 和2r ,即2211r ωr ω= (1)定义齿轮的传动比12i 等于主动轮的角速度与从动轮角速度的比。
由式(1)有122112r r ωωi ==(2) 由于齿轮啮合时齿距必须相等,而齿距等于齿轮节圆周长与齿轮齿数的比。
若设齿轮齿数分别为1z 、2z ,则有221122z r πz r π= (3) 从而由式(2)和由式(3)得12122112z z r r ωωi ===(4) 即齿轮传递时,两个齿轮角速度的比等于两个齿轮半径的反比,或等于两个齿轮齿数的反比。
在机械中还有皮带轮传动,如图如图6-12所示。
如不考虑皮带的厚度,并假设皮带与轮无相对滑动,设轮Ⅰ和轮Ⅱ的角速度分别为1ω、2ω,半径分别为1r 和2r ,即图6-122211r ωr ω= (5)皮带轮的传动比12i 为122112r r ωωi ==(6) 即皮带轮的传递时,两个皮带轮角速度的比等于两个皮带轮半径的反比。
由上面公式解本题。
设四个轮的转数分别为1n 、2n 、3n 、4n ,且有22n n = 122112z z n n i == 344334z z n n i ==将两式相乘得31424114z z z z n n i ==解得从动轮Ⅳ的转数4n 为11712811232361450423114=⨯⨯⨯==z z z z n n (r/min ) 6.4 本章小结1.刚体平行移动平行移动:在运动过程中,刚体上任意直线段始终与它初始位置相平行。