六自由度机械臂的运动学分析
- 格式:pdf
- 大小:112.86 KB
- 文档页数:5
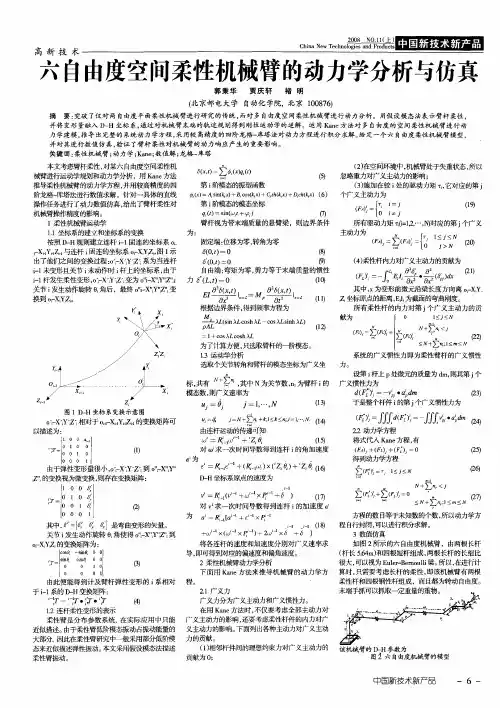
第**卷第**期20**年*月机械工程学报JOURNAL OF MECHANICAL ENGINEERINGVo l.** No.**** 20**DOI:10.3901/JME.20**.**.***六自由度机械手的坐标建立及运动学分析摘要:从运动学分析的基础上着手研究轨迹控制的问题,利用运动学逆解的方式分析复杂轨迹运动的可行性和实用性。
通过建立机械手的笛卡尔坐标系,推导出机械手的正、逆运动学矩阵方程,并研究了正、逆运动学方程的解;在此基础上建立机械手的工作空间,并讨论其工作空间的灵活性和存在可能性。
因此本文的另一种方式对六自由度串联机械手的复杂运动控制问题进行研究,提出以机械手示教手柄引导末端执行器对复杂运动轨迹进行预设计。
然后通过记录程序进行复杂轨迹的再实现,再对记录程序进行预修改,最终通过现有的程序进行设计编程完成复杂轨迹设计任务。
并利用MATLAB对轨迹进行仿真,对比其实际与计算的正确性。
最后本设计通过六自由度串联机械手实现平面文字轨迹,得出其设计的方式。
即首先利用示教手柄实现轨迹预设,记录预设轨迹程序,然后再对比程序初始化坐标进行手动编程。
关键词:六自由度机械手,笛卡尔坐标系,运动学方程,仿真,示教手柄The coordinates of six degrees of freedom manipulator and kinematics analysis is establishedWU Yanchao JIN Yuanxun ZHAO Xin LI Daohai SONG Ping MENG Ya ABSTRACT:T his article based on the analysis of kinematics to study the trajectory control problems, use of inverse kinematics of the complex mode of tracking movement of the feasibility and practicality. Through the establishment of the manipulator Cartesian coordinates, derived manipulator is the inverse kinematics matrix equation and the study is the inverse kinematics of the equation solution on the basis of this establishment manipulator working space. And discuss their work space The flexibility and the possibility exists.So in another way to the six degrees of freedom series manipulator motion control the complex issues of research, to handle the machinery Shoushi guide for the implementation of the end of the complex pre-designed trajectory. Then track record of the complicated procedure to achieve, and then record the pre-amended procedures.The eventual adoption of the existing procedures designed trajectory design of complex programming tasks. And using MATLAB simulation of the track, compared with its actual calculation is correct.The final design through six degrees of freedom series manipulator track to achieve flat text, draw their design approach. That is, first of all use of teaching handle achieve trajectory default the track record of default procedures, and then compared to manual procedures initialized coordinate programming.key words:Six degree-of-freedom manipulators,Cartesian coordinates, Equations of motion,Simulation, Demonstration handle机 械 工 程 学 报 第49卷第6期前言基于六自由度串联机械手的复杂运动控制的研究,期望通过一种使用的轨迹设计方法,即利用六自由度串联机械手实现平面复杂运动轨迹的设计,使其能在不同的工业生产下完成预定的轨迹实现的准确性和实用性,则该机械手将在实在加工工业中发挥更重要的作用,并可完成许多人工条件无法完成的任务,从而提高机械手的利用性。
一、概述在工业自动化和机器人领域,机械臂是广泛应用的一种机械设备,它的位姿确定对于机器人的运动控制和任务执行具有至关重要的意义。
六自由度机械臂作为一种自由度相对较高的机械臂,其位姿确定方法是一个复杂而且具有挑战性的问题,但是确切的位姿确定是机器人能否完成各种复杂任务的基础。
在三维空间中六自由度机械臂位姿确定方法的研究具有重要的理论和实际意义。
二、六自由度机械臂的运动特性六自由度机械臂是指在三维空间中具有六个自由度的机械臂,分别是三个平移自由度和三个旋转自由度。
在运动学分析中,通常使用笛卡尔坐标系和关节坐标系来描述机械臂的位置和位姿。
其中,笛卡尔坐标系用来描述机械臂末端执行器的位置和姿态,而关节坐标系则用来描述机械臂各个关节的角度和位置。
机械臂的位姿确定就是要确定机械臂末端执行器在笛卡尔坐标系中的位置和姿态,通常用位置矢量和姿态矩阵来表示。
三、基于解析法的位姿确定方法基于解析法的位姿确定方法是一种最基本的方法,它是通过对机械臂的运动学方程进行求解来确定机械臂的位置和姿态。
在这种方法中,通常需要对机械臂的几何结构和运动学参数进行精确的建模和描述,然后利用正演运动学方程来求解机械臂的位置和姿态。
这种方法的优点是能够精确地求解出机械臂的位置和姿态,但是也存在着计算复杂度高和数学求解困难的缺点。
四、基于迭代法的位姿确定方法基于迭代法的位姿确定方法是一种比较常用的方法,它是通过对机械臂的正逆运动学方程进行迭代求解来确定机械臂的位置和姿态。
在这种方法中,通常首先根据机械臂的末端执行器的目标位置和姿态,利用逆运动学方程求解出机械臂的关节角度,然后再利用正运动学方程求解出机械臂的位置和姿态。
这种方法的优点是计算简单,并且能够通过迭代计算得到精确的结果,但是也存在着迭代次数多和收敛速度慢的缺点。
五、基于视觉传感器的位姿确定方法随着计算机视觉和图像处理技术的不断发展,基于视觉传感器的位姿确定方法也越来越受到关注。
这种方法是利用摄像头或者其他视觉传感器来获取机械臂末端执行器的图像信息,然后通过图像处理和计算机视觉技术来确定机械臂的位置和姿态。
6自由度机械手的算法介绍6自由度机械手是一种具有6个自由度的机械臂,可以在空间中完成复杂的运动任务。
为了实现机械手的精确控制和运动规划,需要使用一系列算法来实现。
本文将探讨6自由度机械手的算法,包括逆运动学、正运动学、轨迹规划等。
逆运动学逆运动学是指已知机械手末端位置和姿态,计算出各个关节角度的过程。
对于6自由度机械手而言,逆运动学问题是一个复杂的数学问题。
以下是逆运动学算法的基本步骤:1.确定机械手的DH参数,包括关节长度、关节偏移、关节旋转角度等。
2.根据机械手的DH参数,构建正运动学方程,即末端位置和关节角度的关系。
3.根据末端位置和姿态,求解正运动学方程,得到关节角度的解。
4.对于多解的情况,选择最优解,例如使关节角度变化最小或满足特定约束条件的解。
正运动学正运动学是指已知机械手各个关节角度,计算出末端位置和姿态的过程。
对于6自由度机械手而言,正运动学问题相对简单,可以通过矩阵变换来实现。
以下是正运动学算法的基本步骤:1.确定机械手的DH参数。
2.根据机械手的DH参数,构建正运动学方程,即关节角度和末端位置的关系。
3.根据关节角度,求解正运动学方程,得到末端位置的解。
轨迹规划轨迹规划是指在给定起始位置和目标位置的情况下,确定机械手的运动路径和速度的过程。
对于6自由度机械手而言,轨迹规划需要考虑运动的平滑性和避免碰撞等因素。
以下是轨迹规划算法的基本步骤:1.确定起始位置和目标位置。
2.根据起始位置和目标位置,计算出机械手的途径点和运动方向。
3.根据途径点和运动方向,生成平滑的运动路径。
4.考虑机械手的运动速度和加速度,生成合适的速度曲线。
5.考虑碰撞检测,避免机械手和其他物体的碰撞。
动力学建模动力学建模是指根据机械手的结构和参数,建立机械手的运动学和动力学模型的过程。
对于6自由度机械手而言,动力学建模需要考虑关节间的耦合效应和惯性等因素。
以下是动力学建模的基本步骤:1.确定机械手的质量、惯性等参数。
六关节机械臂拉格朗日动力学方程六关节机械臂是一种多自由度机械结构,常见于工业制造、医疗器械等领域,具有灵活、高精度的特点。
在进行机械臂运动控制时,拉格朗日动力学方程是一种重要的数学工具,可以描述机械臂的运动学和动力学特性。
本篇文章将详细介绍六关节机械臂拉格朗日动力学方程的推导过程和应用。
**一、机械臂的构造**六关节机械臂由6个关节连接而成,每个关节可以进行转动运动。
机械臂的末端往往安装有工具或夹具,用于完成各种任务。
机械臂上的每个关节都有一个旋转轴和一个驱动器,通过控制驱动器的运动来控制机械臂的姿态和位置。
**二、运动学分析**在进行动力学分析之前,首先需要对机械臂的运动进行数学建模,得到机械臂各关节的运动学方程。
常用的方法是使用旋转矩阵和欧拉角来描述机械臂的姿态。
将机械臂的姿态表示为旋转矩阵,可以得到机械臂末端位姿与各个关节角度之间的关系。
**三、拉格朗日动力学方程的推导**拉格朗日动力学方程是用于描述机械系统的运动学和动力学特性的重要数学工具。
其基本思想是从系统的运动学模型出发,推导出系统的动力学模型。
1.定义广义坐标和广义速度:根据机械臂的运动学模型,引入广义坐标和广义速度来描述系统的状态,广义坐标用于表示机械臂各关节的角度,广义速度用于表示机械臂各关节的角速度。
2.动能和势能的计算:根据机械臂的构造和运动特点,可以计算出机械臂的动能和势能。
机械臂的动能可以分解为各个关节的动能之和,势能可以表示为机械臂的重力势能。
3.拉格朗日函数的建立:定义拉格朗日函数为系统的动能减势能,即L = T - V。
4.拉格朗日方程的推导:根据拉格朗日函数的定义,可以通过对拉格朗日函数求导来得到系统的运动方程,即拉格朗日方程。
拉格朗日方程描述了系统的动力学特性,包括系统的运动学关系和动力学关系。
**四、应用**通过求解六关节机械臂的拉格朗日动力学方程,可以得到机械臂的运动方程。
这些方程可以用于机械臂的运动规划、轨迹跟踪、运动控制等领域。
搬运机器人六自由度液压机械臂研究目录一、内容概要 (2)1.1 研究背景 (3)1.2 研究意义 (4)1.3 国内外研究现状及发展动态 (5)二、六自由度液压机械臂的理论基础 (6)2.1 液压传动原理 (8)2.2 机器人运动学与动力学基础 (9)2.3 六自由度机械臂的配置与设计要求 (10)三、六自由度液压机械臂的建模与分析 (11)3.1 结构设计与选型 (13)3.2 运动学模型建立 (14)3.3 动力学模型建立 (15)3.4 系统性能分析与优化 (16)四、液压驱动系统设计 (17)4.1 液压泵的选择与设计 (18)4.2 液压缸的设计与选型 (19)4.3 控制阀的选择与设计 (20)4.4 液压系统的控制策略与实现 (22)五、六自由度液压机械臂的仿真研究 (23)5.1 仿真模型的建立 (24)5.2 关键参数的仿真分析 (26)5.3 控制策略的仿真验证 (27)5.4 仿真结果与分析 (28)六、实验研究 (29)6.1 实验设备与方案设计 (30)6.2 实验过程与数据采集 (31)6.3 实验结果与分析 (32)6.4 实验总结与讨论 (34)七、结论与展望 (35)7.1 研究成果总结 (36)7.2 存在问题与不足 (37)7.3 后续研究方向与展望 (38)一、内容概要本研究旨在深入探讨搬运机器人六自由度液压机械臂的运动学、动力学特性及其性能优化。
通过建立精确的数学模型,结合先进的控制算法和仿真技术,我们实现了对机械臂运动过程的精确控制和高效作业。
研究重点涵盖了机械臂的结构设计、驱动机制、感知系统以及控制策略等多个方面。
在结构设计上,我们采用了模块化的设计思路,使得机械臂的维修和部件更换变得更加便捷。
通过采用高性能的液压元件,确保了机械臂在承受较大负载时仍能保持稳定的运动性能。
在驱动机制方面,我们创新性地提出了基于液压驱动的六自由度机械臂方案。
该方案不仅具有较高的能量转换效率,而且能够实现各关节的独立控制,从而提高了机械臂的灵活性和工作效率。
六轴联动机械臂运动学求解分析第一讲作者朱森光Email zsgsoft@1引言笔者研究六轴联动机械臂源于当前的机器人产业热,平时比较关注当前热门产业的发展方向。
笔者工作主要从事软件开发跟机器人毫无关系,利用业余时间研究整理机器人技术相关的文章,希望能够起到抛砖引玉的作用引发更多的人发表有关机器人技术的原创性技术资料。
本系列文章的所有文字、图片及相关资料均为原创,内容正确性经过笔者亲自编程仿真验证可以信赖。
2机器建模2.1坐标系既然要研究机器人,那么首先要建立一个机械模型,本文将以典型的六轴联动机器臂为例进行介绍,图2-1为笔者使用3D技术建立的一个简单模型。
首先建立一个大地坐标系,一般教科书上都是以大地为XY平面,垂直于大地向上方向为Z轴,本文为了跟教科书上有所区别同时不失一般性,将以水平向右方向为X轴,垂直于大地向上方向为Y轴,背离机器人面向人眼的方向为Z轴,移到电脑屏幕上那就是屏幕水平向右为X轴,屏幕水平向上为Y轴,垂直于屏幕向外为Z轴,之所以建立这样不合常规的坐标系是希望能够突破常规的思维定势训练在任意空间建立任意坐标系的能力。
图2-1图2-1中的机械臂,灰色立方体为机械臂底座,定义为关节1,它能绕图中Y轴旋转;青色为关节2,它能绕图中的Z1轴旋转;蓝色为关节3,它能绕图中的Z2轴旋转;绿色为关节4,它能绕图中的X3轴旋转;红色为关节5,它能绕图中的Z4轴旋转;黄色为关节6,它能绕图中的X5轴旋转。
2.2齐次变换矩阵齐次变换矩阵是机器人技术里最重要的数学分析工具之一,关于齐次变换矩阵的原理很多教科书中已经描述在此不再详述,这里仅针对图2-1的机械臂写出齐次变换矩阵的生成过程。
首先定义一些变量符号,关节1绕图中Y轴旋转的角度定义为θ0,当θ0=0时,O1点在OXYZ坐标系内的坐标是(x0,y0,0);关节2绕图中的Z1轴旋转的角度定义为θ1,图中的θ1当前位置值为+90度;定义O1O2两点距离为x1,关节3绕图中的Z2轴旋转的角度定义为θ2,图中的θ2当前位置值为-90度;O2O3两点距离为x2,关节4绕图中的X3轴旋转的角度定义为θ3, 图中的θ3当前位置值为-60度;O3O4两点距离为x3,关节5绕图中的Z4轴旋转的角度定义为θ4, 图中的θ4当前位置值为-60度;O4O5两点距离为x4,关节6绕图中的X5轴旋转的角度定义为θ5, 图中的θ5当前位置值为+60度。
六自由度机械臂轨迹规划及优化研究一、本文概述理论基础与问题阐述:本文将系统梳理六自由度机械臂的数学模型,包括其笛卡尔坐标系下的运动学逆解与正解、动力学建模,以及关节空间与操作空间之间的转换关系。
在此基础上,明确阐述轨迹规划与优化所面临的关键问题,如奇异位形规避、关节速度与加速度限制、路径平滑性要求、动态负载变化等因素对规划算法设计的影响。
轨迹规划方法:针对上述问题,我们将探讨和比较多种有效的轨迹规划策略。
这包括基于插值的连续路径生成方法(如样条曲线、Bzier曲线),基于优化的全局路径规划算法(如RRT、PRM等),以及考虑机械臂动力学特性的模型预测控制(MPC)方法。
对于每种方法,将详细分析其原理、优势、适用场景及可能存在的局限性,并通过实例演示其在典型任务中的应用效果。
轨迹优化技术:在基本轨迹规划的基础上,本文将进一步探究如何运用先进的优化算法对初始规划结果进行精细化调整,以达到性能最优。
这包括使用二次规划、非线性优化、遗传算法等手段对轨迹的关节角序列、时间参数化、能量消耗等指标进行优化。
还将讨论如何引入避障约束、柔顺控制策略以及自适应调整机制,以增强机械臂在复杂环境和不确定条件下的适应性和鲁棒性。
实验验证与性能评估:本文将通过仿真研究与实际硬件平台上的试验,对所提出的轨迹规划与优化方案进行详细的验证与性能评估。
实验设计将涵盖多种典型应用场景,考察规划算法的计算效率、轨迹跟踪精度、能耗表现以及对意外扰动的响应能力。
实验结果将以定量数据与可视化方式呈现,以便于对比分析和理论验证。
本文致力于构建一套全面且实用的六自由度机械臂轨迹规划与优化框架,为相关领域的研究者和工程技术人员提供理论指导与实践参考,推动六自由度机械臂技术在实际应用中的效能提升与技术创新。
二、六自由度机械臂系统建模在六自由度机械臂的研究与应用中,系统建模是一个关键环节。
本节将重点讨论六自由度机械臂的数学建模,包括其运动学模型和动力学模型。
六自由度机械臂轨迹规划研究随着工业自动化的不断发展,机器人技术得到了广泛应用。
六自由度机械臂作为机器人的重要组成部分,具有重要的作用。
本文将围绕六自由度机械臂轨迹规划研究展开,对机械臂轨迹规划的基本原理和方法进行深入探讨。
在机器人领域,六自由度机械臂通常由六个关节组成,每个关节可以独立运动,实现机械臂在三维空间中的位置和姿态的调整。
由于具有高度灵活性和适应性,六自由度机械臂在自动化生产线、航空航天、医疗等领域得到了广泛应用。
轨迹规划是机械臂运动控制的重要环节,其主要目的是根据任务需求,规划出机械臂在运动过程中的位置、速度和加速度等参数。
轨迹规划需要考虑运动学、动力学、精度和时间等多个因素,因此是一项非常复杂的工作。
针对六自由度机械臂轨迹规划,目前常用的方法包括基于运动学的方法、基于逆向动力学的方法和基于人工智能的方法等。
其中,基于运动学的方法主要根据机械臂运动学模型,通过设定末端执行器的轨迹,推算出各关节的运动轨迹;基于逆向动力学的方法则根据机械臂末端执行器的运动轨迹,反推出各关节的运动轨迹;基于人工智能的方法则通过建立神经网络或模糊逻辑等模型,对机械臂轨迹进行学习和预测。
在实际应用中,六自由度机械臂的轨迹规划需要考虑具体任务需求和实际情况。
例如,在抓取和搬运物品的任务中,需要重点考虑机械臂的路径和速度规划,以保证抓取和搬运过程的平稳和准确;在装配和焊接等精细操作中,需要严格控制机械臂的位置和姿态,以保证操作的精度和质量。
本文对六自由度机械臂轨迹规划进行了深入研究,详细探讨了轨迹规划的基本原理和方法。
同时,结合具体任务需求和实际情况,对不同方法的优缺点进行了分析。
在此基础上,提出了针对不同任务的六自由度机械臂轨迹规划方案,并实现了算法优化。
在基于运动学的方法中,建立了六自由度机械臂的运动学模型,推导了末端执行器在空间中的位置和姿态与各关节角度之间的关系。
然后,通过设定末端执行器的轨迹,利用逆向运动学求解各关节的运动轨迹。
六自由度机械臂轨迹规划研究一、本文概述随着机器人技术的快速发展,六自由度机械臂作为其中的重要组成部分,已广泛应用于工业自动化、航空航天、医疗手术等多个领域。
轨迹规划作为六自由度机械臂运动控制的核心技术,对于实现高精度、高效率的机器人操作具有重要意义。
本文旨在深入研究六自由度机械臂的轨迹规划方法,探索其在复杂环境下的运动优化策略,为六自由度机械臂的实际应用提供理论支持和技术指导。
本文将首先介绍六自由度机械臂的基本结构和运动学特性,为后续轨迹规划研究奠定基础。
在此基础上,分析现有的轨迹规划方法,如插值法、优化算法等,并探讨它们的优缺点和适用范围。
接着,本文将重点研究基于约束的轨迹规划方法,包括关节角度约束、运动时间约束、避障约束等,以提高机械臂在运动过程中的稳定性和安全性。
还将探讨基于学习的轨迹规划方法,通过训练神经网络等机器学习模型,使机械臂能够自主规划适应不同环境和任务的轨迹。
本文将通过仿真实验和实际应用案例,验证所提轨迹规划方法的有效性和可行性。
通过对比不同方法的实验结果,分析各方法的优缺点,为六自由度机械臂的轨迹规划提供具体参考和借鉴。
本文的研究成果将有助于推动六自由度机械臂轨迹规划技术的发展,为相关领域的研究和应用提供有力支持。
二、六自由度机械臂概述六自由度机械臂,也称为6-DOF(Degree of Freedom)机械臂,是一种具有高度灵活性和操作精度的工业机器人。
它的名称来源于其拥有六个独立的运动轴,这些轴允许机械臂在三维空间中实现全方位的运动。
与传统的五自由度或更少的机械臂相比,六自由度机械臂具有更大的工作空间、更高的灵活性以及更精确的操作能力,因此在许多复杂的工业应用场景中得到了广泛应用。
六自由度机械臂的基本结构通常包括基座、肩部、肘部、腕部和手部几个部分。
每个部分都可以通过一个或多个旋转关节实现运动,从而实现对物体的抓取、搬运、装配等操作。
这种结构的设计使得机械臂可以在各种姿态下进行操作,而不仅仅是局限于某一特定的工作平面。
六自由度串联机械臂建模与运动学分析党浩明;周亚丽;张奇志【摘要】针对实验室自主研发的六自由度串联机械臂,采用标准DH(Denavit-Hartenberg)法建立机械臂的数学模型,对正逆运动学进行了求解.逆运动学求解中,根据机械臂前3个关节轴相交的特点,采用逆向解耦方法分组求解机械臂的后3个关节变量和前3个关节变量,得到机械臂在非奇异状态下的8组完整解析解;正逆运动学求解过程中,采用设置中间变量的方法代替齐次矩阵连乘,有效缩短了算法的运行时间.最后对正逆运动学求解算法及机械臂的工作空间进行了仿真,验证了运动学算法的有效性及该种构型机械臂的实用性,为后续机械臂的运动规划与实时控制打下了基础.【期刊名称】《实验室研究与探索》【年(卷),期】2018(037)010【总页数】7页(P9-14,23)【关键词】机械臂;运动学;逆运动学;解析解;工作空间【作者】党浩明;周亚丽;张奇志【作者单位】北京信息科技大学自动化学院,北京100192;北京信息科技大学自动化学院,北京100192;北京信息科技大学自动化学院,北京100192【正文语种】中文【中图分类】TP2410 引言机械臂是由一系列通过关节连接的连杆所组成的运动链。
1955年,Denavit等[1]用4个参数来描述机械臂连杆坐标系,并建立了连杆坐标系间的通用变换,成为了机械臂建模和运动学描述的标准方法。
机械臂运动学研究各关节运动与机械臂末端执行器位姿之间的关系,主要包括正向运动学和逆向运动学。
对于给定的一组关节角,其正向运动学解总是存在且唯一;而逆向运动学的求解则较为困难。
正向运动学可以理解为从关节空间到操作空间的映射,关节空间中任一位形,在操作空间中可以找到唯一的解与之对应。
而对于逆运动学,操作空间中任一位形,在关节空间中可能存在无解、唯一解或多解的情况。
1961年,Pieper[2]证明了带有3个相邻关节轴交于一点的机械臂存在逆运动学解析解,为机械臂结构设计提供了理论依据,目前大多数工业机器人都具有此种构型。
六轴机械臂逆运动学原理及仿真设计一、引言机械臂是一种能够模拟人类手臂运动的机械装置,广泛应用于工业自动化、医疗手术、物流等领域。
其中,六轴机械臂是一种常见的机械臂类型,具有较高的灵活性和精度。
本文将介绍六轴机械臂的逆运动学原理以及仿真设计。
二、六轴机械臂逆运动学原理逆运动学是指已知机械臂末端位置和姿态,求解各个关节角度的过程。
对于六轴机械臂而言,其逆运动学原理可以通过以下步骤进行求解:1. 建立坐标系首先,需要建立机械臂的坐标系。
对于六轴机械臂而言,通常采用DH(Denavit-Hartenber g)坐标系建立方法。
该方法通过定义关节坐标系和连杆坐标系之间的转换关系,将机械臂的运动描述为一系列的旋转和平移运动。
2. 建立正运动学模型根据机械臂的几何参数和DH坐标系的定义,可以建立机械臂的正运动学模型。
正运动学模型可以将关节角度转化为末端位置和姿态的描述,即由关节角度求解末端位置和姿态。
3. 求解逆运动学问题已知末端位置和姿态,需要求解各个关节角度。
逆运动学问题通常存在多解性,即可以有多组关节角度满足末端位置和姿态的要求。
求解逆运动学问题的方法有数值解法和解析解法两种。
数值解法通常采用迭代的方式,通过不断调整关节角度的初始值,使得末端位置和姿态逼近目标值。
常用的数值解法有牛顿-拉夫逊法(Newton-Raphson)和雅可比转置法(Jacobi an transpose)等。
解析解法则通过数学推导直接求解关节角度的表达式。
解析解法的优点是计算速度快,但对于复杂的机械臂结构和运动约束较多的情况,解析解法可能无法求解。
三、六轴机械臂仿真设计六轴机械臂的仿真设计可以通过计算机软件进行,常用的仿真软件有MATLAB、SolidWor ks和ROS等。
以下是一种基于ROS的六轴机械臂仿真设计流程:1. 建立机械臂模型在ROS中,可以通过URDF(Unified Robot Description Format)文件来描述机械臂的几何参数和运动学信息。