匹配导航
- 格式:pdf
- 大小:4.60 MB
- 文档页数:47
如何进行车辆导航系统中的地图匹配和路线规划车辆导航系统是现代交通工具中的一项重要技术。
它能够准确地为驾驶者提供路线指引和实时导航,提高行车安全和效率。
而地图匹配和路线规划是车辆导航系统中的核心功能之一,它们通过对车辆位置和道路信息的处理,以实现准确的导航和路线选择。
本文将探讨如何进行车辆导航系统中的地图匹配和路线规划。
地图匹配是指将车辆的实时位置与道路地图上的相应位置进行匹配。
它的目的是找到最佳匹配点,从而确定车辆实际所在的道路。
地图匹配算法主要通过利用车辆感知数据,如全球定位系统(GPS)数据和惯性测量单元(IMU)数据,结合道路地图信息来实现。
首先,通过GPS数据获取车辆的经纬度坐标,并利用地图信息找到附近的道路段。
然后,通过比较车辆位置和道路段的几何属性,如距离和角度,来确定最佳匹配点。
最后,通过考虑车辆移动的车速和方向,进一步优化匹配结果。
地图匹配的准确性和实时性对于车辆导航系统至关重要,因为它直接影响着导航指引的准确性和及时性。
在完成地图匹配后,车辆导航系统需要进行路线规划。
路线规划是指根据起点和终点的位置信息,选择最佳路径来实现导航。
路线规划算法主要通过考虑道路网络的拓扑结构和交通状况来实现。
首先,通过地图信息获取道路网络的拓扑结构,即道路之间的连接关系。
然后,通过交通状况信息,如道路拥堵情况和路段速度限制,对道路进行评估和排序。
最后,通过搜索算法,如A*算法或Dijkstra算法,找到起点到终点的最佳路径。
路线规划的准确性和高效性对于车辆导航系统来说非常重要,因为它直接影响驾驶者的出行体验和行车效率。
在进行地图匹配和路线规划时,还需要考虑一些特殊情况和复杂因素。
例如,车辆导航系统需要处理地图的更新和维护问题,因为道路网络和交通规划经常发生变化。
在地图更新时,需要将新的地图信息与车辆当前位置进行匹配和更新,以保证导航指引的准确性。
此外,车辆导航系统还需要考虑导航偏航和路径重规划问题。
地图匹配算法研究及应用地图匹配算法是指将GPS轨迹数据与地图上的道路网络相匹配的算法。
随着GPS定位技术的普及,越来越多的人开始使用GPS设备来记录自己的行动轨迹。
然而,由于GPS测量误差和信号遮挡等原因,GPS轨迹数据并不完全准确,因此需要通过地图匹配算法来改善其精度。
一、传统地图匹配算法传统地图匹配算法主要有三种:最近邻算法、HMM算法和粒子滤波算法。
1.最近邻算法最近邻算法是一种简单且有效的地图匹配算法。
该算法首先将GPS轨迹点与道路网络上的所有节点进行距离计算,然后将GPS轨迹点与最近的节点相匹配。
该算法简单易实现,但其精度较低,对于道路较为复杂的区域容易产生匹配错误。
2.HMM算法HMM算法是一种基于贝叶斯理论的地图匹配算法。
该算法将GPS轨迹点视为观测序列,将道路网络视为状态序列,并使用HMM模型来匹配GPS轨迹点。
相对于最近邻算法,HMM算法考虑了GPS轨迹点之间的关系,在处理复杂的道路网络时具有较高的精度。
但是,该算法的计算复杂度较高,需要大量的计算资源。
3.粒子滤波算法粒子滤波算法是一种基于贝叶斯滤波的地图匹配算法。
该算法使用粒子滤波器来估计GPS轨迹点所在的道路,并通过重采样方法来改善估计的精度。
相对于HMM算法,粒子滤波算法更加灵活,可以处理不同种类的观测数据,并具有较高的精度。
但是,该算法的计算复杂度较高,在实时应用中需要充分考虑计算效率。
二、基于深度学习的地图匹配算法近年来,随着深度学习技术的不断发展,基于深度学习的地图匹配算法逐渐成为研究热点。
深度学习基于神经网络模型,通过学习海量数据来提高模型的精度。
基于深度学习的地图匹配算法主要有两类:基于卷积神经网络(CNN)的算法和基于循环神经网络(RNN)的算法。
1.基于CNN的算法基于CNN的地图匹配算法主要采用图像处理技术,将GPS轨迹数据转换成图像形式,然后使用CNN网络来匹配GPS轨迹点。
该算法可以处理复杂的道路网络,具有较高的精度,并且能够自动学习特征,避免了传统算法中需要手动设计特征的问题。
测绘技术中的精确导航与地图匹配方法解析随着科技的发展,测绘技术在导航和地图匹配方面发挥着越来越重要的作用。
精确导航和地图匹配方法的研究不仅可以提高导航系统的准确性,还可以应用于交通管理、地理信息系统等领域。
本文将从定位技术、地图匹配方法以及应用案例三个方面,探讨测绘技术中的精确导航与地图匹配方法。
一、定位技术在精确导航和地图匹配中,定位技术是关键环节。
目前常用的定位技术有卫星定位系统(GPS)、惯性导航系统、视觉传感器等。
卫星定位系统是最为广泛应用的定位技术之一,通过接收多颗卫星的信号,可以精确测定用户的位置。
然而,在城市峡谷、高楼群等复杂环境中,GPS的精度会受到很大的影响。
因此,研究人员提出了将惯性导航系统与GPS相结合的方法,以提高定位的精度和可靠性。
另外,视觉传感器也逐渐应用于导航领域。
通过图像识别和处理,视觉传感器可以获取周围环境的特征,进而确定用户的位置。
二、地图匹配方法地图匹配是指将定位数据与地图数据进行比对,确定用户所在的位置。
在地图匹配中,主要考虑两个问题:一是位置匹配,即用户的位置和地图上的位置如何对应;二是方向匹配,即用户的行进方向和地图上的道路方向如何对应。
目前,常用的地图匹配方法有基于几何特征的方法、基于特征点匹配的方法和基于机器学习的方法。
基于几何特征的方法主要利用测量数据和地图中的道路几何信息进行匹配。
主要步骤包括道路几何特征提取、特征匹配和位置计算等。
这种方法适用于城市道路网络比较简单的情况,但在复杂的交叉口和环岛等地方容易出现误匹配的情况。
基于特征点匹配的方法则利用图像处理技术,通过提取道路边界、交叉口等特征点,将其与地图上的特征点进行对比。
这种方法适用于城市道路网络比较复杂的情况,但对于特征点提取和匹配算法的准确性要求较高。
基于机器学习的方法则是近年来的研究热点。
通过建立位置匹配模型,利用机器学习算法对定位数据和地图数据进行训练和匹配预测。
这种方法在大规模数据处理和复杂环境下具有较好的适应性和准确性。
基于InSAR的三维地形匹配导航技术的研究与实现尹智龙;王可东;高意峰【期刊名称】《太赫兹科学与电子信息学报》【年(卷),期】2016(014)005【摘要】A 3-D terrain matching navigation system based on Interferometric Synthetic Aperture Radar(InSAR) information is proposed, wherein the system employs a 3-D terrain matching algorithm based on 3-D Zernike moments. A new method for solving the problem of huge computation of 3-D Zernike moments in use of terrain matching and the problem of rotation adaptability is provided. In order to verify the effectiveness and the performances of the algorithm, a 3-D visual software simulation platform based on C++ and OpenSceneGraph(OSG) is constructed. Simulation results show that the 3-D terrain matching algorithm based on 3-D Zernike moments is high in positioning precision and strong in terrain adaptability, problems of real-time performance are well solved, and high practical value in engineering is obtained by the system.%研究了一种以干涉合成孔径雷达(InSAR)信息为基础的三维地形匹配导航系统,该系统采用基于3-DZernike矩的三维地形匹配算法,同时针对3-D Zernike矩在地形匹配中计算实时性差的问题进行了改进。
无人驾驶车辆导航技术中的地图匹配原理随着技术的飞速发展,无人驾驶车辆正逐渐成为现实。
然而,要实现无人驾驶的目标,需要一个高精度且实时更新的地图数据,以便车辆能够准确地了解自身位置和周围环境。
而地图匹配技术在这一过程中起到了至关重要的作用。
地图匹配是指将车辆实际所在位置与地图上的相应位置进行对应的过程。
它的核心原理是通过分析车辆的传感器数据,如GPS、激光雷达等,在地图上找到与之最匹配的位置。
而这个过程涉及到了许多关键的技术和算法。
一种常用的地图匹配算法是基于几何特征的匹配方法。
它通过对比车辆感知到的实际位置与地图上的道路几何特征,如道路形状、宽度等,来确定车辆所在的位置。
例如,如果车辆感知到的道路形状与地图上的道路形状高度吻合,那么可以认为车辆所在的位置就是地图上相应位置。
然而,几何特征匹配并不是完美的方法。
道路几何特征的变化可能导致匹配的不准确,尤其是在复杂的城市环境中。
为了解决这个问题,还有一种基于特征点的地图匹配方法。
这种方法会找到车辆传感器数据中的特征点,并与地图上的特征点进行对应。
通过比较特征点之间的距离和相对位置,可以确定车辆实际所在的位置。
除了几何特征和特征点,还有一些其他的数据可以用于地图匹配,如车辆传感器数据中的车道线信息和交通标志信息等。
这些数据可以进一步提高地图匹配的准确性和鲁棒性。
比如,通过检测车道线信息的匹配程度,可以精确定位车辆所在的车道,从而提供更精准的导航指引。
然而,地图匹配并非完美无缺。
在实际应用中,还存在一些挑战和困难。
首先,地图数据的精度和更新频率对地图匹配的质量至关重要。
对于无人驾驶车辆而言,它们需要的是高精度的地图数据,并且需要及时地更新。
其次,城市环境的复杂性和动态性也对地图匹配提出了很高的要求。
城市中的道路和交通情况可能会发生频繁的变化,这就需要地图匹配系统能够实时地适应这些变化,并做出准确的决策。
为了解决这些挑战,研究人员正在不断开展相关的研究。
一方面,他们致力于提高地图数据的精度和更新频率,如通过高分辨率卫星图像和地面测量工具等方式。
基于重力匹配导航的潜艇避障方法分析一、引言介绍目前潜艇避障技术的现状,重力匹配导航在潜艇避障中的作用以及本论文的研究意义。
二、重力匹配导航技术简介阐述重力匹配导航的原理、优势和限制,以及其在潜艇避障中的应用和局限性。
三、潜艇避障场景分析分析潜艇在不同的水下环境中的避障场景,包括海底地形、水流、海洋生物等因素对潜艇的影响。
四、基于重力匹配导航的潜艇避障方法研究结合重力匹配导航技术,提出一种潜艇避障方法,包括建立地形模型、遥测数据融合、避障实时控制等环节的具体实现方案。
五、实验结果分析以模拟水下环境下的避障场景为例,对本文提出的方法进行实验,分析不同情况下的避障效果,并结合实验结果总结讨论。
六、结论与展望总结本论文的研究工作,指出研究的局限和不足之处,并展望重力匹配导航技术在潜艇避障领域的进一步应用方向。
一、引言潜艇在水下航行时必须面对各种复杂的水下环境,如峭壁、水流、海底障碍物等,因此,避障成为潜艇航行中的重要问题。
现有的潜艇避障技术主要是基于声纳测距和逐层扫描,然而这些技术存在着很多缺陷,如定位不精确、耗时长、易被干扰等。
因此,开发一种更为高效、精准的潜艇避障技术势在必行。
重力匹配导航作为新型的定位与导航技术,近年来在水下机器人尤其是潜艇领域得到了广泛应用。
重力匹配导航利用海底重力场与水下机器人测量的三维加速度数据之间的比较,通过匹配重力异常场来实现定位与导航。
与传统的声纳测距相比,重力匹配导航可以提供更为稳定和高精度的定位和导航,而且具有测距范围广、防干扰能力强等优势,可以有效解决潜艇避障时的问题。
因此,本文旨在探讨基于重力匹配导航的潜艇避障方法。
本研究通过分析水下环境中的避障场景、阐述重力匹配导航的原理及其在潜艇避障中的应用,提出一套实用性较强的潜艇避障方法,并通过实验结果的分析,展示该方法的可行性和可靠性。
这对于提高潜艇在水下任务中的自主性和航行安全性具有重要的意义。
二、重力匹配导航技术简介重力匹配导航技术是一种基于海底重力场的定位与导航技术,它利用水下机器人测量的三维加速度数据与海底重力场之间的比较匹配,通过分析比较结果来计算水下机器人的位置和姿态。
地图匹配算法在智能导航中的应用随着科技的不断发展,我们已经可以利用导航软件在陌生的环境中快速地找到我们的目的地。
然而,在有些情况下,这些导航软件并不总是十分准确。
有时它们会指错路,或者计算出错,导致我们走错路。
这就是因为导航软件通常只通过GPS信号来计算位置,而忽略了许多其他的信息。
这个问题可以通过地图匹配算法得到解决。
地图匹配算法是一种基于匹配GPS和其他传感器提供的数据的算法。
该算法可以将GPS数据与数字地图中的道路进行匹配,从而提高导航准确性。
这个技术在智能导航设备中被广泛应用。
地图匹配算法的基本原理是将GPS定位数据与地图上的道路网络匹配。
为了实现这一目标,它使用数字地图上的节点和道路来表示道路网络。
如果GPS数据从道路上离开,那么它就会使用传感器数据来辅助匹配。
这种算法对于智能导航的准确性至关重要。
例如,在城市环境中,高楼大厦会对GPS信号造成干扰,导致定位不准确。
但是,地图匹配算法可以利用其他传感器,例如加速度计和陀螺仪,来提高定位的准确性。
这可以让导航软件更好地了解车辆或行人的位置,并提供更准确的指导。
此外,地图匹配算法可以提供更准确的路线规划。
例如,在通过城市或乡村等不清晰的地区时,导航软件可能会选择路线,这些路线并不是最短或最快的。
使用地图匹配算法,软件可以更好地了解道路网络,并给出更准确的路线。
尽管地图匹配算法可以提高导航的准确性,但它并不完美。
例如,在建筑物或地形变化较大的地方,数字地图可能会过时或不准确。
这可能会导致算法匹配错误。
此外,地图匹配算法也需要高质量的传感器数据。
如果传感器数据不正确或不可靠,算法就可能出错。
总之,地图匹配算法是智能导航中不可或缺的一环。
它使用传感器数据来提高GPS定位的准确性,并提供更准确的路线规划。
尽管它并不完美,但随着技术的不断发展,地图匹配算法将变得更加准确和可靠,提高我们的生活质量。
定位导航系统的地图匹配技术近年来,定位导航系统越来越普及,无论是汽车导航、智能手机导航,还是步行导航,我们都离不开定位导航系统。
而这些系统中最重要的核心技术之一就是地图匹配技术。
它可以说是定位导航系统中最关键的一环,也是定位精度的保证。
本文将从地图匹配技术的基本原理、应用场景、常见问题及解决方式等方面,深入探讨定位导航系统的地图匹配技术。
一、地图匹配技术的基本原理所谓地图匹配技术,就是将定位设备收集到的点位信息与真实地图进行比对,并将其映射到最接近的位置上。
在这个过程中,需要进行的操作包括数据预处理、特征提取、匹配算法等。
具体来说,就是将收集到的点位信息转化为数字信号,在此基础之上,通过信噪比、精度、干扰等因素,进行有效的特征提取和路径匹配,最终得到精度较高的地图匹配结果。
二、地图匹配技术的应用场景地图匹配技术在定位导航系统中有着广泛的应用。
其中,最典型的应用场景就是城市道路网络的路径规划。
在这个场景下,地图匹配技术能够准确地匹配用户的实时位置和目标位置之间的路径,从而为用户提供合适的路线规划和导航服务。
此外,在城市交通监控、车载安全、交通预测等方面,地图匹配技术也有着重要的应用。
三、地图匹配技术常见问题及解决方式地图匹配技术的应用有着很高的实用价值,但是也存在着一些常见的问题。
比如,在密集的城市建筑群中,接收到的卫星信号可能会受到干扰,从而导致路径匹配的误差增加。
而且一些地区的道路情况比较复杂,包括道路交叉口、隧道、高架等,这些情况都加剧了路径匹配的难度。
此外,用户在行驶过程中,可能存在意外出现的行驶路线变化,也会影响到匹配结果的精度。
针对上述问题,有多种解决方式。
首先,可以采用多信号源、多频段供应的方法,以增加卫星信号传输的可靠性和精度。
同时,地图匹配技术也可以通过引入机器学习等智能化算法,提高路径匹配的效率和精度。
此外,通过结合交通、天气等多种因素,对路径和路线进行动态规划和优化,也可以进一步提高地图匹配的效率和准确性。
地磁匹配导航的原理地球上的磁场是由内核的涡流和地幔的热对流所产生的大规模磁场结构。
这个磁场有着时间和空间上的变化,这些变化可以被用来进行导航定位。
人们已经观测到地球磁场的变化是有规律的,比如同一地区的磁场变化可以被认为是稳定的,而不同地区的磁场则有明显的差别。
这种差别是由地表的地磁异常所致,它是地壳中的矿物质、岩石和矿物质经地质作用形成的,使地壳地磁场的总场与预报场有差别的异常现象。
通过现代地磁传感器可以测量到地球上的磁场信息,这些传感器可以被安装到移动设备上,例如智能手机和汽车导航系统。
传感器可以测量磁场的三个分量,即X轴(水平向北)、Y轴(水平向东)和Z轴(垂直向上)。
在导航过程中,移动设备会实时采集和记录地磁数据。
为了实现导航定位,需要进行地磁数据的处理和分析。
一般来说,首先需要进行数据的预处理和滤波,以去除噪声和干扰。
然后,通过特定的算法将地磁数据转化为导航方向信息。
常用的算法有地磁传感器校准、地磁判定和地磁匹配。
地磁传感器校准是指通过分析采集的地磁数据,确定地磁传感器的偏差和误差,然后校正得到准确的磁场数据。
这一步骤是非常重要的,因为地磁传感器的准确性对导航定位结果有着重要的影响。
地磁判定是指根据地磁数据来判断当前的导航方向。
可以通过计算磁场矢量的模长和角度来确定设备的朝向。
通过与预先设定的方向进行比较,可以得到当前的方位信息。
地磁匹配是指将测得的地磁数据与地磁数据库进行匹配,来确定当前位置。
地磁数据库通常包含了已知位置的地磁数据集合。
通过对比采集到的地磁数据与数据库中的数据,可以找到最匹配的位置信息。
最后,通过地磁匹配导航系统,可以实现在地铁、室内等GPS信号不可用的环境下的定位导航。
这种导航技术具有定位精度高、成本低廉等优点,被广泛应用于智能手机、车载导航、无人驾驶等领域。
总之,地磁匹配导航的原理是基于地球磁场的变化特征,通过采集地磁数据和利用算法来实现导航定位和方向判定。
通过地磁传感器校准、地磁判定和地磁匹配等步骤,可以实现在GPS信号不可用的环境下的准确导航定位。
匹配导航——地磁匹配导航
内容
一.必要性
二.研究现状
三.现状分析
四.我们的工作
五.未来的工作
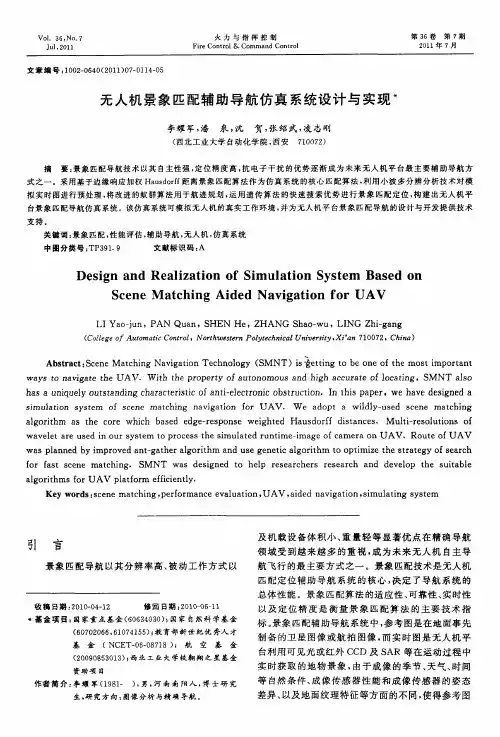
地形匹配导航
61000
6150062000
62500
63000
X /m
63000
204500205000205500206000206500207000
Y/m
真实航迹INS航迹匹配航迹
一、必要性
随着陆地资源的匮乏,近年来国家对海洋资源的开发力度愈来愈大,应用于海底管线探测、水下沉船打捞以及水下资源勘探等领域的水下自制运动载体(如AUV,ROV)的研究得到了快速发展
AUV
ROV
攻击性核潜艇(SSN)必
潜艇导航系统必须是一种功能齐备、复杂而自动化程度极高
有源导航手段:
以
短基线,超短基线,主动声呐为代表的声学导航:1)精度较高;2)需要母船搭载;3)发射声信号隐蔽性差。
GNSS:
1)准确性高;2)信号在水中衰减较快;3)水面或近水面导航隐蔽性差。
地形匹配导航定位系统
1)发射声信号隐蔽性差;2)海洋地形特征变化平缓,精度低。
惯性导航系统
1)无源;2)全天候;3)实时提供三维位置及速度;4)导航定位误差随时间积累。
重力辅助导航
1)无源;2)全天候;3)海底重力变化较为平缓区,不稳定;4)匹配序列较长。
因此,研究无源、自主、高精度水下导航定位技术,保证水下导航系统的精度和稳定性显得非常必要和迫切。
地磁:
1)一种基本地球物理学特征存在于地球的每一个角落。
2)地磁场包含7要素,这些要素均可以作为匹配源,保证了匹配的多样性和稳定性。
3)地磁作为矢量数据,具有指向性。
4)地磁无需向外界发射信号。
其导航具有无源性、隐蔽性。
期解决现有导航系统存在的问题,为水下潜航器服务。
二、研究现状研究现状
地磁导航系统研究现状
地磁背景场模型研究现状
地磁匹配导航算法研究现状
适配区划分研究现状
研究现状(系统)
20世纪60年代末,美国的E-systems公司提出了基于地磁异常场等值线匹配的MAGCOM系统,从而开始了现代地磁匹配导航系统的研究。
20世纪80年代初,瑞典的lund学院对船只的地磁强度进行了实验,实验中将地磁强度的测量数据与地磁图进行人工比对,确定船只的位置;同时根据距离已知的两个传感器的输出时差,确定船只的速度。
20世纪90年代,美国科学家Pasiaki和BarItzhack提出了通过测量卫星所在位置的地磁场强度自主确定卫星轨道,将地磁导航应用于实践。
研究现状(系统)
直到2000年之后,美国才推出了优于500m的水下地磁导航系统,并计划将其应用于提高巡航鱼雷的命中率。
NASA高戈德空间中心和有关大学对水下地磁导航进行了研究,并进行了大量的地面试验。
波音公司也正在开展基于地磁导航的飞机自动着陆系统。
俄罗斯方面,在2004年进行的“安全-2004”演习中试射的SS-19导弹可以不按照抛物线沿稠密大气层边缘近乎水平飞行,使敌方导弹防御系统无法准确预测来袭导弹弹道,军事专家分析其也可能使用了地磁场等高线匹配制导技术。
研究现状(地磁背景场模型的构建)IGRF (IAGA每5年更新一次)
WMM (BGC、USGC每5年更新一次)
优:范围较大,顾及了全球地磁变化。
缺
:精度较低(100nT-200nT),分辨率低。
2007年二炮指挥学院王仕成等
分析了利用全球地磁场模型进
行匹配导航的可行性,认为其
很难满足匹配导航的精度。
全球地磁场模型
研究现状(地磁背景场模型的构建)✓美国、日本、加拿大、罗马尼亚、蒙古、越南等国每5年更新一次自己国家的区域地磁场模型。
✓中国地磁场模型(CGRF):由我国地质勘探部门与中科院地质
与地球物理研究所每10年更新一次,目前精度50-150nT。
区域地磁场模型
研究现状(地磁导航算法)
Tercom
✓美国麦道飞机公司研制的机动地形相关系统(MTCS)✓英国不列颠宇航公司(BAE)研制的地形剖面匹配系统(TERPROM)
✓英国费伦蒂公司研制的PENETRATE系统
✓法国萨基姆公司(SAGEM)研制的地形剖面匹配导航
•优点:
1)运算速度较快。
2)对数据采样限制较小。
•缺点:
1)精度较低,无法实现小于格网的定位精度。
2)初始角度偏差较大时,匹配稳定性较差。
研究现状(地磁导航算法)
ICCP
ICCP算法通过反复寻找与测量点集最近的对应点集,确定刚性变换(旋转矩阵和平移向量),使两组点集之间残差平方和所构成的目标函数值最小。
(上世纪90年代末
Behzad Kamgar-Parsi和Behrooz提出)。
•优点:
1)可以计算出实时的平移量及旋转变量。
2)细部精度高于TERCOM。
•缺点:
1)计算速度较慢。
2)数据采样间隔要求较高。
3)容易产生局部收敛,从而引起误匹配。
SITAN
SITAN系统全称为桑迪亚惯性地形辅助导航系统,是美国Sandia实验室于上世纪80年代末开始研制的一套地形匹配导航算法。
优点:实时性较好。
缺点:初始误差过大时,极易产生滤波发散。
三、现状分析及存在问题
以IGRF为代表的国际地磁参考场模型和CGRF为代表的区域地磁场
模型精度过低难以满足地磁匹配导航的需要。
同时地磁数据处理研究也亟待进行。
地磁导航虽然已经开展了TERCOM、ICCP以及SITAN方面的研究,也
已投入到地形匹配等方面的应用中,但针对这几种方法的环境适用性研究以及误匹配研究较少。
而且这三种方法均存在自身的局限性,如何实现三者有机融合的研究目前仍是空白。
无论是潜艇还是导弹等军用设备,在实际应用前必须进行必要的
适配导航区域的选择,进而使载体的途经区域内包含有更多的地磁特征,最终才能实现更好、更稳定的导航。
目前在这方面的研究较少。
海洋地磁测量及数据处理
海洋地磁区域背景场模型构建
海洋地磁导航方法及改进
不同地磁特征下的最优匹配算法研究
海洋地磁导航误匹配诊断技术
基于TERCOM、ICCP以及SITAN联合的海洋地磁准实时导航方
法研究
基于地磁共生矩阵的地磁导航适配区及适配航向确定
海洋地磁导航误差综合分析
海洋地磁、INS及压力传感器导航信息融合
海洋地磁匹配导航系统设计
四、我们的工作及存在的问题
海洋地磁测量:
1)介绍测量所需的传感器2)拖鱼的安装定位3)日变站的架设4)船磁测量5)测量流程
研究内容(一)
海洋地磁测量及数据处理
海洋地磁数据处理:
1)地磁数据滤波2)船磁建模3)日变改正4)磁异常计算
5)测量精度评定
研究内容(一)
1)不同分辨率数据对地磁场模型精度的影响2)地磁特征对地磁建模精度的影响
3)截止阶数、曲面参数等与模型精度的关系
关键技术:
研究内容(二)
TERCOM:
1)介绍算法原理,并分析其优缺点。
2)针对对初始角度误差较为敏感的缺陷,提出一种基于自适应角度探测的TERCOM改进算法。
3)将Hussdorff距离引入其中,作为一种新的相关性度量指标。
研究内容(三)
海洋地磁导航方法及改进SITAN:
1)介绍了SITAN算法的工作原理。
2)研究了地磁线性化技术。
3)研究了滤波发散监测机制。
P
…M Nψ
ψ
2
1)TERCOM
TERCOM算法主要基于格网平移机制。
导航稳定性直接受背景场相关性影响,因此该算法的稳定性从
•计算地磁背景场相关长度以确定合适的匹配航迹长度
•分析背景场在航迹平行方向的相关性
两方面来研究。
不同地磁特征下的最优匹配导航算法研究
研究内容(四)
2)ICCP
ICCP算法的核心就是刚性变化,因此该算法的稳定主要从
•平移量的可靠性与等值点分布关系
•旋转量的稳定性与等值点分布关系
两方面进行研究。
研究内容(四)
The corresponding MSD
导航方法研究
基于地磁共生矩阵的地磁导航适配区及适配航向确定
研究内容(七)
通过对这些参量进行显著性分析,最后确定出地磁导航适配
地磁适配航向的选择。
及误差量级对地磁导航最终精度产生的影响。
基于地磁、INS以及压力传感器的数据融合算法
研究内容(九)
设计Kalman抗差自适应滤波模型,实现地磁匹配、惯性导航与压力计数据的深度融合。
地磁导航结果
惯导导航结果
压力传感器深度+-
INS GNS Kalman 滤波X G
X I X 压力传感器
五、还需要解决的问题最优高精度海洋局部地磁场模型构建方法
海洋地磁导航误匹配诊断
适配区划分及适配航向确定
导航算法的准确性、实时性
地磁导航误差综合分析
谢谢各位
Thank you for your attention。