结构力学位移法讲解学习
- 格式:ppt
- 大小:2.80 MB
- 文档页数:135

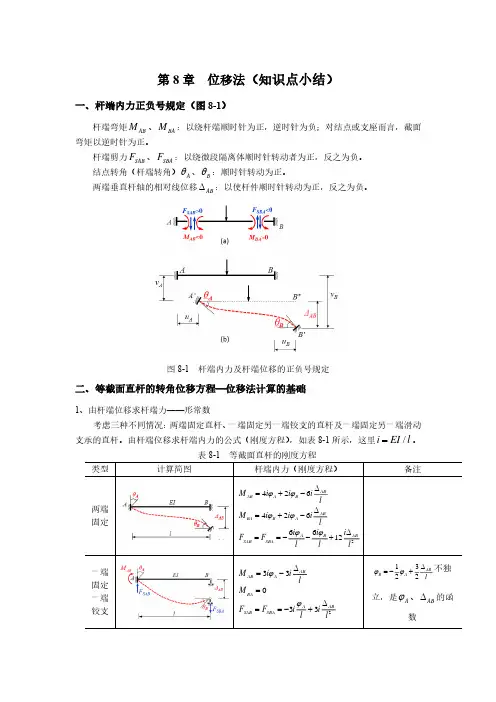
第8章 位移法(知识点小结)一、杆端内力正负号规定(图8-1)杆端弯矩AB M 、BA M :以绕杆端顺时针为正,逆时针为负;对结点或支座而言,截面弯矩以逆时针为正。
杆端剪力SAB F 、SBA F :以绕微段隔离体顺时针转动者为正,反之为负。
结点转角(杆端转角)A θ、B θ:顺时针转动为正。
两端垂直杆轴的相对线位移AB ∆:以使杆件顺时针转动为正,反之为负。
图8-1 杆端内力及杆端位移的正负号规定二、等截面直杆的转角位移方程—位移法计算的基础1、由杆端位移求杆端力——形常数考虑三种不同情况:两端固定直杆、一端固定另一端铰支的直杆及一端固定另一端滑动支承的直杆。
由杆端位移求杆端内力的公式(刚度方程),如表8-1所示,这里/i EI l =。
由杆端位移求出杆端弯矩后,杆端剪力可由平衡条件求出。
表8-1中,杆端内力是根据图示方向的位移方向求得的,当计算某一结构时,应根据其杆件所受的实际位移方向,判断其杆端内力的正负号及受拉侧。
2、由荷载求固定内力——载常数对三种等截面直杆,在荷载作用、温度改变作用下的杆端弯矩和剪力,称为固端弯矩和固端剪力(载常数)。
常见荷载作用下的载常数可查表所得。
3、等截面直杆的转角位移方程对等截面直杆,既有已知荷载作用,又有已知的杆端位移,可根据叠加原理,写出其杆端力的一般表达式,这即为等截面直杆的转角位移方程。
三、位移法的基本未知量包括独立的结点角位移和独立的结点线位移。
独立的结点角位移数目等于刚结点(包括组合结点、弹性抗转弹簧)的数目。
结点线位移的数目可通过增设支杆法(或铰化体系法)来确定。
铰化体系法就是将原结构中所有刚结点和固定支座均改为铰结点形成铰接体系,此铰接体系的自由度数就是原结构的独立结点线位移数。
然后分析该铰接体系的几何组成:如果它是几何不变的,说明结构无结点线位移;相反,如果铰接体系是几何可变的,再看最少需要增设几根附加支杆才能确保体系成为几何不变,或者说使此铰接体系成为几何不变而需添加的最少支杆数就等于原结构的独立结点线位移数目。
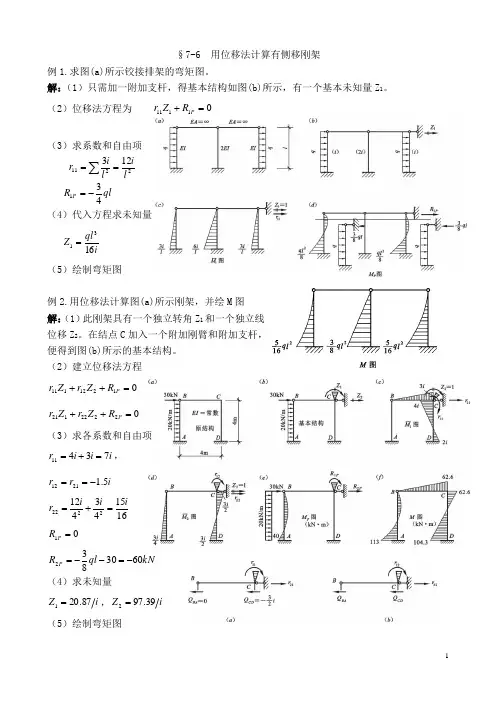
§7-6 用位移法计算有侧移刚架例1.求图(a)所示铰接排架的弯矩图。
解:(1)只需加一附加支杆,得基本结构如图(b)所示,有一个基本未知量Z 1。
(2)位移法方程为01111=+P R Z r(3)求系数和自由项2211123l il i r ==∑ql R P 431-=(4)代入方程求未知量iql Z 1631=(5)绘制弯矩图例2.用位移法计算图(a)所示刚架,并绘M 图 解:(1)此刚架具有一个独立转角Z 1和一个独立线位移Z 2。
在结点C 加入一个附加刚臂和附加支杆,便得到图(b)所示的基本结构。
(2)建立位移法方程01212111=++P R Z r Z r 02222121=++P R Z r Z r(3)求各系数和自由项i i i r 73411=+=, i r r 5.12112-==1615434122222ii i r =+=01=P RkN ql R P 6030832-=--=(4)求未知量i Z 87.201=,i Z 39.972=(5)绘制弯矩图例3.用直接平衡法求刚架的弯矩图。
解:(1)图示刚架有刚结点C 的转角Z 1和结点C 、D 的水平线位移Z 2两个基本未知量。
设Z 1顺时针方向转动,Z 2向右移动。
(2)求各杆杆端弯矩的表达式3421+-=Z Z M CA 3221--=Z Z M AC 13Z M CD =25.0Z M BD -=(3)建立位移法方程有侧移刚架的位移法方程,有下述两种:Ⅰ.与结点转角Z 1对应的基本方程为结点C 的力矩平衡方程。
∑=0CM , 037021=+-⇒=+Z Z M M CD CAⅡ.与结点线位移Z 2对应的基本方程为横梁CD 的截面平衡方程。
∑=0xF, 0=+DC CA Q Q取立柱CA 为隔离体(图(d)),∑=0A M , 331216262121-+-=---=Z Z ql Z Z Q CA同样,取立柱DB 为隔离体((e)),∑=0B M , 2212165.0Z Z Q DB =--= 代入截面平衡方程得03125012133121221=-+-⇒=+-+-Z Z Z Z Z(4)联立方程求未知量 Z 1=0.91 Z 2=9.37(5)求杆端弯矩绘制弯矩图将Z 1、Z 2的值回代杆端弯矩表达式求杆端弯矩作弯矩图。