“捕食者”无人机的内部结构
- 格式:doc
- 大小:451.00 KB
- 文档页数:12

“捕食者”系列无人机的地面控制系统:地面控制站安装在长10米的独立拖车内,内有遥控操作的飞行员、监视侦察操作手的座席和控制台,三个任务计划开发控制台、两个合成孔径雷达控制台,以及卫星通信、视距通信数据终端。
1.“捕食者”无人机的地面控制系统由两名操作人员控制:·一名驾驶员(PPO-1),负责操纵无人机的飞行;·一名传感器操作员(PPO-2),负责控制各种机载传感器和武器系统。
2.人机界面由四个液晶显示器组成:·最上方的显示器显示无人机航路规划和数字地图叠加信息;·中间的显示器则实时显示无人机头部的彩色摄像机拍摄到的画面,其作用相当于有人驾驶战斗机上的平视显示器(HUD);·最下方的两个显示器则显示各种传感器采集到的信息、图像、战术信息、飞机状态和飞行仪表等内容,相当于有人驾驶战斗机上的多功能下视显示器(MFD)。
3.在GCS系统的右侧安装有操纵杆,而在座舱左侧安装有油门杆,十分符合美军战斗机飞行的侧杆操纵习惯。
4.GCS系统可装在很多移动平台上,例如车辆、舰船甚至大型飞机上,以便操作人员在远离战场千里之外的任意地点对“捕食者”系列无人机进行遥控。
“捕食者”无人机和地面控制系统都装备L-3通信公司提供的C波段数据链系统终端和Ku 波段卫星数据链系统通信终端,这样即使在地球的另一端也可对“捕食者”系列无人机进行遥控。
飞机本身还装备了UHF和VHF无线电台。
(甚高频 VHF (Very High Frequency)30-300MHz无线电波主要是作较短途的传送;特高频 UHF (Ultra High Frequency)300-3000MHz无线电波;UHF和VHF是电视上的不同的两个波段)“捕食者”无人机系统的地面遥控方式:1.通过C波段数据链对无人机进行近程直线(LOS)遥控,其遥控范围可达280千米,主要适用于无人机的起飞和降落阶段的近距离通信;2.以一架无人机作为通信中继机对战场前沿的另一架无人机进行远程遥控;3.以一架无人机和一个地面控制系统分别作为通信中继机和中继站对战场前沿的无人机进行远程遥控;4.通过Ku波段的卫星数据链中继对远在万里之外的无人机进行遥控,并传送任务控制信息以及侦察图像信息。

捕食者无人机美军用于为战区指挥官及合成部队指挥官进行决策提供情报支持的中空长航时无人侦察机。
机长8 13米,翼展14 85米,最大活动半径3700公里,最大飞行时速240公里,在目标上空留空时间24小时,最大续航时间60小时。
该机装有光电/红外侦察设备、GPS导航设备和具有全天候侦察能力的合成孔径雷达,在4000公尺高处分辨率为0 3米,对目标定位精度0 25米。
可采用软式着陆或降落伞紧急回收。
美国在科索沃战争中动用了2架"捕食者"无人机用于小区域或山谷地区的侦察监视工作。
1999年美军装备9 架该型飞机,计划到2002年采购12架"捕食者"飞机。
研制国家:美国型号:猎食者Predator研制单位:通用原子公司(General Atomics)造价:约450万美元现状:现役一、概述:猎食者中空中程无人机,是作为“高级概念技术验证”而从1994年1月到1996年6月发展起来的。
它是与加利福尼亚州圣地亚哥的通用原子公司得到了第一份合同。
它首飞于1994年,并于当年具备了实战能力。
捕食者的TPE-331发动机二、性能指标:机长320。
4英寸翼展580。
8英寸高72英寸频率C波段燃油容量110升最长续航能力40小时升限26000英尺失速速度54节巡航速度70-90节起飞重量2100磅三、结构特点:“捕食者”可方便的装载在运输箱内,进行长途运输四、武器控制与电子系统:一个典型的“捕食者”系统包括四架无人机,一个地面控制系统和一个“特洛伊精神II”数据分送系统。
无人机本身的续航时间高达40小时,巡航速度126千米/小时。
飞机本身装备了UHF和VHF无线电台,以及作用距离270千米的C波段视距内数据链。
机上用于监视侦察的有效载荷为204千克。
机上的两色DLTV光学摄影机采用了955mm 可变焦镜头。
高分辨率的前视红外系统有6个可调焦距,最小为19mm,最大560mm。
诺斯罗普•格鲁门公司的合成孔径雷达为“捕食者”提供了全天候监视能力,分辨率达到了0。
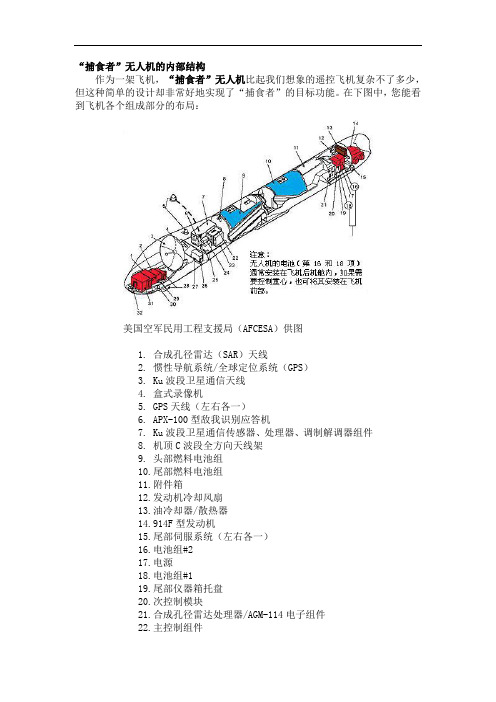
“捕食者”无人机的内部结构作为一架飞机,“捕食者”无人机比起我们想象的遥控飞机复杂不了多少,但这种简单的设计却非常好地实现了“捕食者”的目标功能。
在下图中,您能看到飞机各个组成部分的布局:美国空军民用工程支援局(AFCESA)供图1.合成孔径雷达(SAR)天线2.惯性导航系统/全球定位系统(GPS)3.Ku波段卫星通信天线4.盒式录像机5.GPS天线(左右各一)6.APX-100型敌我识别应答机7.Ku波段卫星通信传感器、处理器、调制解调器组件8.机顶C波段全方向天线架9.头部燃料电池组10.尾部燃料电池组11.附件箱12.发动机冷却风扇13.油冷却器/散热器14.914F型发动机15.尾部伺服系统(左右各一)16.电池组#217.电源18.电池组#119.尾部仪器箱托盘20.次控制模块21.合成孔径雷达处理器/AGM-114电子组件22.主控制组件23.前舱航空电子设备托盘24.ARC-210接收机/应答器25.飞行传感元件26.视频解码器27.除冰控制器28.电光/红外线传感器/AN/AAS-52(V)1电子组件29.前舱载重托盘30.冰探测器31.合成孔径雷达(SAR)接收器/应答器32.机鼻摄像机组件在下面几个部分,我们将了解这种朴实无华的飞机如何以其特殊功能打破战斗的平衡。
RQ-1型飞机是用于侦察用途的“捕食者”无人机。
字母“R”是美国国防部代表侦察机的符号,字母“Q”则代表无人驾驶或自动运行的武器、车辆或飞行器。
“捕食者”采用简单轻质的机身设计,使飞机能够携带204公斤重量的有效载荷,再外加一个升的油箱。
由于“捕食者”的重量很轻,因而它可以携带很大的油箱,而且单位油耗运行里数很高,这些都是作为一架侦察机的最大优点。
“捕食者”能够在满载的情况下对敌方目标实施长达24小时的监视。
美国空军供图RQ-1型飞机在执行任务时会使用一组机鼻摄像机来进行监控RQ-1使用了一批当今最先进的监视设备:全彩机鼻摄像机,主要用于为飞机导航可变光圈摄像机(类似于传统的电视摄像机),是“捕食者”的主要“眼睛”可变光圈红外摄像机,在暗光和夜视条件下拍摄合成孔径雷达(SAR ),用于透过雾气、云层以及烟幕进行观察所有位于飞机前表面的摄像机都可以生成全动态视频以及静止雷达图像。


无人机结构及其各功能王兆博
机架:多旋翼承载平台,强度高;减弱起飞时的地效;吸收着陆时撞击的能量
云台:维持相机在无人机抖动时的稳定;减小了外部条件对相机的抖动影响
螺旋桨:直接产生推力,使无人机能够起飞、移动
无刷电机:为无刷直流电机,靠电子电路换向减小了电火花对遥控设备的影响,是螺旋桨动力的来源
电调:调节电机速度;充当换向器的作用;电池保护
电池:提供能量,对重量要求很严格
遥控器:将操作指令传输到接收机,接收机解码后传输到飞控上
飞控:分别与GPS、接收机、图传发射模块、电调及云台信号线连接,是整个无人机的心脏,起到“导航”、“控制”、“决策”的功能
图传:将云台相机拍到的图像传回地面站。
无人机的结构、飞行原理、系统组成、组装与调试目录第一章初步认识无人机的基本构成第二章无人机的飞行原理第三章飞行操作:模拟—电动—油动第四章无人机的发动机第五章无人机的系统组成第六章无人机的组装第七章无人机的调试第一章初步认识无人机的基本构成无人机最早出现于第二次世界大战时,直至近几年有厂商逐步把军用无人机技术转移至电子消费品的生产之上,制成定价较平、操作较易的无人机,始令无人机在消费者市场大热起来。
今次Lock Sir便为大家讲解无人机的运作结构及飞行原理。
一般来说,无人机有飞行器机架、飞行控制系统、推进系统、遥控器、遥控信号接收器和云台相机等6大构成部分。
1. 飞行器机架飞行器机架(Flying Platform)的大小,取决于桨翼的尺寸及电机(马达/马达)的体积:桨翼愈长,马达愈大,机架大小便会随之而增加。
机架一般采用轻物料制造为主,以减轻无人机的负载量(Payload)。
2. 飞行控制系统飞行控制系统(Flight Control System)简称飞控,一般会内置控制器、陀螺仪、加速度计和气压计等传感器。
无人机便是依靠这些传感器来稳定机体,再配合GPS 及气压计数据,便可把无人机锁定在指定的位置及高度。
3. 推进系统无人机的推动系统(Propulsion System)主要由桨翼和马达所组成。
当桨翼旋转时,便可以产生反作用力来带动机体飞行。
系统内设有电调控制器(Electronic Speed Control),用于调节马达的转速。
4. 遥控器这是指Remote Controller或Ground Station,让航拍玩家透过远程控制技术来操控无人机的飞行动作。
5. 遥控信号接收器主要作用是让飞行器接收由遥控器发出的遥控指令信号。
4轴无人机起码要有4条频道来传送信号,以便分别控制前后左右4组旋轴和马达。
6. 云台相机目前无人机所用的航拍相机,除无人机厂商预设于飞行器上的相机外,有部分机型容许用户自行装配第三方相机,例如GoPro Hero 4运动相机或Canon EOS 5D系列单眼相机,惟近年亦有厂商提倡采用M4 /3无反单眼(如:Panasonic LUMIX GH4)作航拍用途。
捕食者无人机概述张进摘要:无人机具有造价低、使用经济性、实效性较强、出勤率较高的特点,可对目标实施连续不断的跟踪侦察,使战场透明度、侦察实时性大大提高。
特别是无人攻击机在现代战争中的应用,军用无人机发展至今已经达到了在实战中代替飞行员驾驶战斗机实施作战任务、进行空中格斗的效果。
在无人机的发展过程中,美国是全球无人机领域的领航者,其空军配备的“捕食者”无人机及其配套体系更是美国无人机技术发展到一定程度的产物,具有极强的代表性。
关键词:无人机;捕食者无人机;监视系统;工作原理一、概述无人机最早起源于军用靶机,经过数十年的发展,军用无人机的型谱已从靶机逐步扩展到预警、侦察、探测、通信、诱饵、战斗等多个方面。
美国在越南战争中使用无人机执行侦察任务,开启了无人机在战场应用的先河。
此后,在海湾战争、科索沃战争、伊拉克战争等现代战争中,无人机得到越来越广泛的应用,战略和战术地位迅速提升,发挥着越来越大的作用。
捕食者无人机是一种飞行续航时间长的多用无人机,主要用于侦察、监视、目标指定、电子战和实弹攻击。
该型无人机于1984年开始研制,1999年进入服役。
捕食者(Predator)是该无人机的名称,其代号RQ-1为侦察型,MQ-1为多用型。
捕食者无人机目前主要有两个型号,即捕食者-A和捕食者-B。
捕食者无人机的战术技术数据捕食者-A 捕食者-B 机长8.75m 10.36m翼展14.85m 19.52m二、结构组成(一)机体结构机 体 高2.21m 尾 翼 展4.38m 飞 行 速 度204km/h 370km/h 待 机 速 度111~130lm/h 278km/h 续 航 时 间24h 25h 最大续航时间40h 升 限7926m 13725m 推 进一台78.3kW 的Rotax914型4缸4冲程发动机 一台559kW 杭尼韦尔公司的TPE-331-10T 涡轮螺桨发动机 负 荷 205kg(光-电/红外或合成孔径雷达) 317.5kg(光-电/红外和合成孔径雷达)起 飞 质 量 1023kg2721kg采用细长近似圆柱形的机身,头部为半球形,机身中部有一对展弦比很大的梯形下单机翼,采用低雷诺数翼型使其具有优越的气动性能,机翼控制面包括后缘外侧副翼和后缘2/3翼展内侧襟翼,机翼下面有武器挂架。
无人机的基本构成与作用原理无人机最早出现于第二次世界大战时,直至近几年有厂商逐步把军用无人机技术转移至电子消费品的生产之上,制成定价较平、操作较易的无人机,使无人机在消费者市场大热起来。
今次中环通航便为大家讲解无人机的运作结构及飞行原理。
一、无人机分类:按照动力系统分类:电动无人机、油动无人机、混合动力无人机等。
按照操控方式分类:遥控无人机(如消费级航拍无人机)、自主无人机(具备一定自主导航能力的无人机)。
按结构形式分类:固定翼无人机、旋翼无人机(如四旋翼、六旋翼、八旋翼等多轴无人机)、复合翼无人机等。
二、飞行原理:固定翼无人机主要依靠空气动力学原理产生升力飞行;旋翼无人机则是通过多组电机驱动旋翼旋转产生向上的升力来实现悬停和飞行。
三、无人机的基本构成。
1、螺旋桨无人机产生推力的主要部件,常见的多旋翼无人机一般搭配4个螺旋桨,两个顺时针旋转,两个逆时针旋转。
正桨:俯视逆时针旋转(CCW)反桨:俯视顺时针旋转(CW)2、电机俗称马达,能将电能转化为机械能,带动螺旋桨旋转,从而产生推力。
在微型无人机当中使用的动力电机可以分为两类:有刷电动机和无刷电动机。
3、电子调速器不仅可以调节电机转速,也可以为遥控接收器上其他通道的舵机供电,还能将电池提供的直流电转换为可直接驱动电机的三相交流电。
对于它们在多旋翼无人机中的连接,一般情况如下:(1)电调的输入线与电池连接;(2)电调的输出线(有刷两根、无刷三根)与电机连接;(3)电调的信号线与遥控器接收机连接。
4、动力电源为多旋翼无人机提供能量,直接关系到无人机的悬停时长、最大负载重量和飞行距离等重要指标。
通常采用化学电池来作为电动无人机的动力电源,主要包括:镍氢电池,镍铬电池,锂聚合物,锂离子动力电池。
5、主控单元飞行控制系统的核心,通过它将IMU、GPS指南针、舵机和遥控接收机等设备接入飞行控制系统从而实现飞行器自主飞行功能。
除了辅助飞行控制以外,某些主控器还具备记录飞行数据的黑匣子功能。
“捕食者”无人机的内部结构
作为一架飞机,“捕食者”无人机比起我们想象的遥控飞机复杂不了多少,但这种简单的设计却非常好地实现了“捕食者”的目标功能。
在下图中,您能看到飞机各个组成部分的布局:
美国空军民用工程支援局(AFCESA)供图
1.合成孔径雷达(SAR)天线
2.惯性导航系统/全球定位系统(GPS)
3.Ku波段卫星通信天线
4.盒式录像机
5.GPS天线(左右各一)
6.APX-100型敌我识别应答机
7.Ku波段卫星通信传感器、处理器、调制解调器组件
8.机顶C波段全方向天线架
9.头部燃料电池组
10.尾部燃料电池组
11.附件箱
12.发动机冷却风扇
13.油冷却器/散热器
14.914F型发动机
15.尾部伺服系统(左右各一)
16.电池组#2
17.电源
18.电池组#1
19.尾部仪器箱托盘
20.次控制模块
21.合成孔径雷达处理器/AGM-114电子组件
22.主控制组件
23.前舱航空电子设备托盘
24.ARC-210接收机/应答器
25.飞行传感元件
26.视频解码器
27.除冰控制器
28.电光/红外线传感器/AN/AAS-52(V)1电子组件
29.前舱载重托盘
30.冰探测器
31.合成孔径雷达(SAR)接收器/应答器
32.机鼻摄像机组件
在下面几个部分,我们将了解这种朴实无华的飞机如何以其特殊功能打破战斗的平衡。
RQ-1型飞机是用于侦察用途的“捕食者”无人机。
字母“R”是美国国防部代表侦察机的符号,字母“Q”则代表无人驾驶或自动运行的武器、车辆或飞行器。
“捕食者”采用简单轻质的机身设计,使飞机能够携带204公斤重量的有效载荷,再外加一个378.5升的油箱。
由于“捕食者”的重量很轻,因而它可以携带很大的油箱,而且单位油耗运行里数很高,这些都是作为一架侦察机的最大优点。
“捕食者”能够在满载的情况下对敌方目标实施长达24小时的监视。
美国空军供图
RQ-1型飞机在执行任务时会使用一组机鼻摄像机来进行
监控
RQ-1使用了一批当今最先进的监视设备:
全彩机鼻摄像机,主要用于为飞机
导航
可变光圈摄像机(类似于传统的电
视摄像机),是“捕食者”的主要“眼
睛”
可变光圈红外摄像机,在暗光和夜
视条件下拍摄
合成孔径雷达(SAR ),用于透过
雾气、云层以及烟幕进行观察 所有位于飞机前表面的摄像机都可
以生成全动态视频以及静止雷达图像。
RQ-1能赶在先头部队或车辆到达之前,为指挥部提供敌方位置的实时图像,这些信息可以使战场指挥官迅速准确地判断出敌方的实力,并决定如何部署和调动军队。
当然,“捕食者”最大的优势在于不但保持了传统侦察机的所有优点,同时还不会将飞行员暴露在敌方环境中。
如果说还有一种方式比使用无人驾驶飞机来协助作战决策更有优势的话,这种方式只能是让无人飞机直接为士兵战斗,而这正是“捕食者”MQ -1型猎手/杀手无人机大显身手的舞台。
将摄像机阵列更换为多谱瞄准系统(MTS ),再为“捕食者”装载两枚海尔法导弹,就使飞机从一名战场侦察员转变成了杀伤力很强的自动化战士。
MQ-1中的字母“M”是美国国防部代表多用途飞行器的符号;事实上,加装了MTS 系统和海尔法导弹的“捕食者”就是一架名副其实的多用途战斗机。
美国空军供图 空军人员正在清洗MQ-1“捕食
者”
美国空军供图
待命中的MQ-1型猎手/杀手
MTS系统中包含AGM-114海尔法导弹瞄准系统、光电红外系统、激光指示器和激光照明器。
所有这些组件为“捕食者”及其操作人员提供了在各种战斗环境下寻找目标的多种渠道。
“捕食者”通过位于飞机机鼻附近的MTS球状转塔,发射一束激光或红外线。
这束激光有两种用途:
光束照射到目标上发出脉冲信号,让海尔法导弹尾部的激光导引头发现目标。
机载计算机利用这种光束来进行弹道和距离计算。
MTS系统中还包含各种用于计算风速、风向以及其他战场变量的传感器,根据它们收集的所有数据,确定导弹的发射方案。
这一过程被称为“描绘目标”。
一旦成功描绘目标,MQ-1飞机将能发射自身携带的导弹以摧毁目标,或者把发射方案传送给其他飞机或地面部队,以便它们摧毁目标。
美国空军供图
MQ-1“捕食者”在发射海尔法导弹后返航
MQ-1型无人机的战斗效率已经在近期的数次冲突中得到验证,其中包括发生在阿富汗、波黑、科索沃、伊拉克和也门的冲突。
“捕食者”曾经和有人驾驶飞机并肩战斗,也曾为地面部队提供过空中支援,还曾对敌方防空力量尚未被完全压制的地区实施打击。
另外,它们还可以代替载人飞机在非常危险的环境中(如远海或受到生化污染的环境)执行任务。
而且,即使在装载了MTS系统之后,“捕食者”MQ-1型无人机仍能有效地执行战场侦察任务。
美国空军供图
对于战斗型号的“捕食者”无人机来说,也许最受非议的用途就是秘密空中暗杀了。
2002年2 月7日,美国中央情报局使用一架武装“捕食者”攻击并摧毁了一队被怀疑运送基地组织恐怖分子的SUV越野护航车队。
2002年11月3日,中央情报局使用一架“捕食者”在也门发射了一枚海尔法式导弹,命中一辆小汽车,击毙了被认为与科尔号驱逐舰爆炸事件有关的基地组织头目Qaed Senyan al-Harthi。
尽管“捕食者”的这种用途非常罕见,但如果使用传统方法,这些任务中没有一个能在不威胁美军部队生命的情况下完成。
根据美国国防部的观点,“捕食者”不仅仅是一架飞机,而是一套系统。
这一观点源于“捕食者”独特的部署和控制方式。
版权所有2003 General Atomics Aeronautical Systems Inc.
“捕食者”无人机的远程引航站
完整的系统包括四架“捕食者”(带有传感器)、一个配有飞行员和传感器操作员的地面控制站(GCS),以及一个“捕食者”主卫星链路通信套件。
地面上有技师以及与飞机相关的支持人员,整场“表演”需要大约82个人才能成功完成。
这样一个紧密合作的团队能够利用四架“捕食者”飞机,对地面控制站周围400海里半径区域内的目标实施24小时的监视。
“捕食者”能够自动运行,并且自动执行计划侦察等简单任务,另外它也能在机组人员的控制下运行。
每一架“捕食者”无人机的机组包括一名飞行员和两名传感器操作员。
飞行员使用标准飞行驾驶杆和相关控制系统来驾驶飞机,这些控制系统通过C波段视距数据链路将指令发出去。
当操作超出了C波段的范围时,将使用Ku波段卫星链路,在卫星和飞机之间传播命令和应答。
飞机通过L-3Com 卫星数据链路系统接受命令,飞行员和机组则根据从飞机接收到的图像和雷达数据来决定如何控制飞机。
“捕食者”的飞行员将这种方式比作透过模糊不清的摄像画面来观察和驾驶飞机,这和在座舱中驾驶传统飞机有着天壤之别。
“捕食者”的飞行员必须依赖机载摄像机来观察飞机周围的情况。
对于机组人员来说,能见度受限的缺陷是为了提高人员安全而付出的代价。
版权所有2003General Atomics Aeronautical Systems Inc.
“捕食者”的飞行员将这种方式比作透过模糊不清的摄像画
面来观察和驾驶飞机。
“捕食者”的最大优点之一就是整个系统都是可以完整运输的。
飞机可以分解成六个部分,封装在一个叫做“棺材”的巨型板条箱内运输。
“棺材”中包含:机身
机翼
尾翼面
起落装置
推进系统
两个有效载荷/电子设备舱
版权所有2003General Atomics Aeronautical Systems Inc.
一架解体后的“捕食者”被装进“棺材”以便运输
系统的最大组件是地面控制站(GCS)。
地面控制站带有轮子,可以滑进运输机中。
“捕食者”的主卫星通信链路包含一个6.1米的圆盘卫星天线及辅助装置,这个部件同样可以拆开。
“棺材”(GCS)和卫星链路系统可以同时装进一架
C-130“大力神”或者C-141“运输星”运输机的货舱中。
整套系统就是这样从一个任务地点运输到下一个任务地点。
到达指定地点之后,每台“捕食者”可以由4名机组人员在8个小时以内组装完毕。
美国空军供图
“捕食者”组装完毕等待起航
“捕食者”正在不断推出新的改型,使飞机的功能得到不断扩展。
通过修改机身,将翼展增加到26米,新型“捕食者”将能达到15,240米的最大飞行高度。
最新的机型叫做MQ-9“牵牛星”。
在和平时期,该飞机将用于科学及大气研究。
美国海军和海岸警卫队也将拥有各自型号的“捕食者”无人机,以供监视和侦察使用。
“捕食者”并不是美军使用的唯一无人机。
从20世纪90年代初到现在,RQ-2“先锋”、RQ-3“暗星”、RQ-4“全球鹰”、RQ-5“猎人”、RQ-6“超骑手”以及RQ-7“影子”等型号飞机也都被用于侦察用途。
但是,“捕食者”及其改型是唯一带有战斗性能的无人机,也是与载人战机并肩作战配合最好的无人机。
美国空军供图
随着远程控制的自动作战单元的添加,我们似乎可以看到军事科技的发展趋势:自动化的战士在前线执行任务,而人工控制员则安全地坐在后方的计算机终端前参与战斗。
有关“捕食者”及其他远程控制飞机的更多信息,请查看下一页上的链接。