汽车CAN总线数字组合仪表设计
- 格式:pdf
- 大小:543.01 KB
- 文档页数:10
CAN总线数据通讯功能设计摘要:近年来,社会进步迅速,我国的智能化建设的发展也有了改善。
CAN(ControllerAreaNtework)即控制器局域网络,最初是由德国的BOSCH公司为汽车监测、控制系统而设计的。
现代汽车越来越多采用电子装置控制,如发动机的定时、注油控制、加速、刹车、自动泊车、倒车雷达及复杂的制动防抱死系统(ABS)等。
这些电子装置的控制需实时检测及交换大量的数据,仅使用传统点对点的连接方式来实现子系统之间的随机通信,不但繁琐、昂贵,且难以解决问题。
采用CAN总线上述问题就能得以很好的解决。
因为CAN总线为多主站总线,各节点可在任意时刻向网络上的其他节点发送信息,不分主次,通信灵活;采用短帧结构,数据传输时间短,最大传输数率可达1Mbps(通信距离小于40m)。
CAN总线技术由于高性能、高可靠性及其独特的设计备受人们的重视,经过十几年的发展,该技术已成为所有车载电子控制系统互联、互通的标准,广泛应用于汽车电子监测系统。
关键词:CAN总线;数据通讯;功能设计引言随着汽车的普及,人们对汽车舒适度要求越来越高,使得汽车电子技术发展迅速,越来越多的汽车电子控制单元(ElectronicControlUnit,ECU)被应用于汽车控制。
诊断功能的实现是ECU开发过程中的重要部分,对诊断功能进行集成测试是为了验证功能实现与设计规范的一致性。
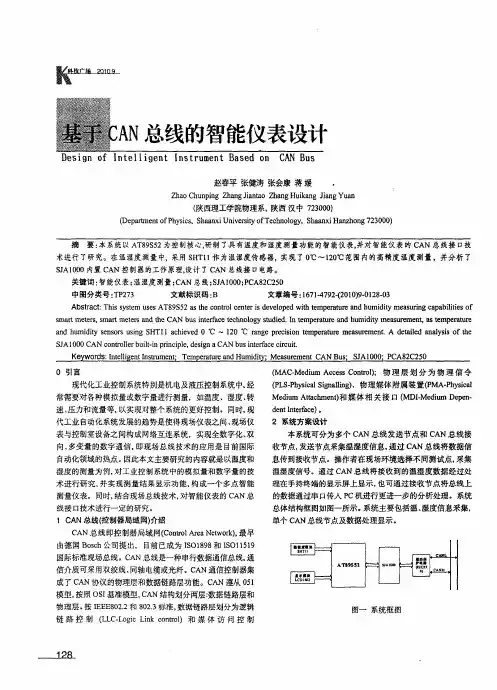
1方案的实现电路主要由四个部分构成:微控制器、独立CAN通信控制器、CAN总线收发器、高速光耦。
微控制器负责CAN通信控制器的初始化。
CAN通信控制器有发送和接收两端,它能够同时读写总线,这个功能对于错误检测与总线仲裁都很重要,因此通过控制CAN通信控制器实现数据的接收和发送通讯任务。
CAN通信控制器要通过CAN总线收发器上的线驱动器和总线接口进行总线的读写,总线是通过典型的双绞线传输差分电压信号,处理CAN总线两端的节点应设置跨接在两根双绞线间的终端匹配电阻。
CAN 总线技术在汽车仪表中的应用3魏先民(潍坊学院,山东 潍坊 261061)摘 要:首先介绍了CAN 总线技术,然后给出了CAN 总线技术在以Mot or ola16位单片机MC9S12为中央控制器的某汽车仪表系统中的应用,并对该系统总体结构及C AN 通信模块的软硬件设计作了详细说明。
关键词:C AN 总线;汽车仪表;MC9S12中图分类号:TP391 文献标识码:A 文章编号:1671-4288(2008)02-0049-02 控制局域网C AN (Contr ol Local Ne t w ork )是德国Bosch 公司为解决车载控制与测试仪器间的数据交换而开发的现场总线。
车载微控制器ECU 之间交换信息,形成汽车电子控制网络。
C AN 网络具有反应快、可靠度高的特性,应用于要求实时处理的场合,例如汽车刹车防锁死系统安全气囊等。
此协议已成为现代汽车设计中必须采用的装置,奔驰、宝马、大众、沃尔沃及雷诺汽车都将C AN 作为控制器联网的手段。
1 C AN 总线的特点及通讯协议1.1 CA N 总线的特点C AN 是一种多主方式的串行通讯总线,有高位速率、高抗电磁干扰性,而且能够检测出产生的任何错误,有效地支持分布式控制或实时控制的串行通讯网络。
C AN 的应用范围遍及从高速网络到低成本的多线路网络。
在汽车发动机控制部件、传感器、抗滑系统等应用中,CAN 的位速率可高达1Mbps 。
其通讯介质可以是双绞线、同轴电缆或光纤。
C AN 总线通信协议包括CA N2.0A 和C AN2.0B 两种。
(1)CAN2.0A 通信协议规定了4种不同的帧格式。
数据帧:用于节点间传递数据,是网络信息的主体。
远程帧:由在线单元发送,用于请求发送具有相同标识符的数据帧,其帧格式与数据帧基本相同,但没有数据场。
出错帧:出错帧是检测总线出错的一个信号标志,由两个不同的场构成。
CAN 协议采用CRC 检验并可提供相应的错误处理功能,保证数据通讯的可靠性。
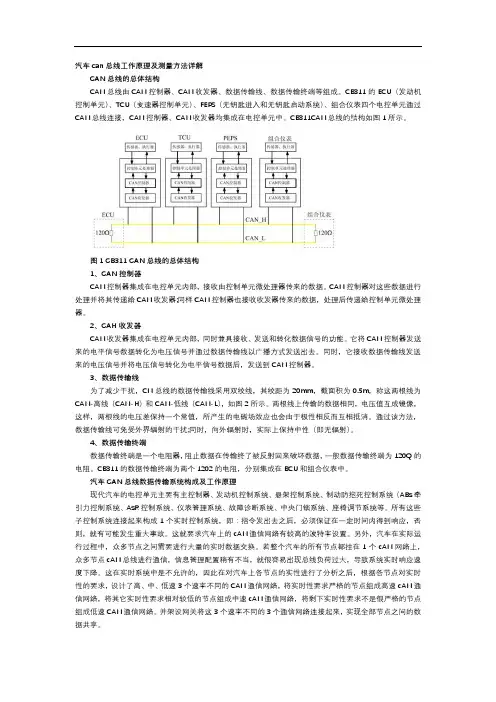
汽车can总线工作原理及测量方法详解CAN总线的总体结构CAN总线由CAN控制器、CAN收发器、数据传输线、数据传输终端等组成。
CB311的ECU(发动机控制单元)、TCU(变速器控制单元)、FEPS(无钥匙进入和无钥匙启动系统)、组合仪表四个电控单元通过CAN总线连接,CAN控制器、CAN收发器均集成在电控单元中。
CB311CAN总线的结构如图1所示。
图1 CB311 CAN总线的总体结构1、CAN控制器CAN控制器集成在电控单元内部,接收由控制单元微处理器传来的数据。
CAN控制器对这些数据进行处理并将其传递给CAN收发器;同样CAN控制器也接收收发器传来的数据,处理后传递给控制单元微处理器。
2、CAH收发器CAN收发器集成在电控单元内部,同时兼具接收、发送和转化数据信号的功能。
它将CAN控制器发送来的电平信号数据转化为电压信号并通过数据传输线以广播方式发送出去。
同时,它接收数据传输线发送来的电压信号并将电压信号转化为电平信号数据后,发送到CAN控制器。
3、数据传输线为了减少干扰,CN总线的数据传输线采用双绞线,其绞距为20mm,截面积为0.5m,称这两根线为CAN-高线(CAN-H)和CAN-低线(CAN-L),如图2所示。
两根线上传输的数据相同,电压值互成镜像,这样,两根线的电压差保持一个常值,所产生的电磁场效应也会由于极性相反而互相抵消。
通过该方法,数据传输线可免受外界辐射的干扰;同时,向外辐射时,实际上保持中性(即无辐射)。
4、数据传输终端数据传输终端是一个电阻器,阻止数据在传输终了被反射回来破坏数据,一般数据传输终端为120Q的电阻。
CB311的数据传输终端为两个1202的电阻,分别集成在BCU和组合仪表中。
汽车CAN总线数据传输系统构成及工作原理现代汽车的电控单元主要有主控制器、发动机控制系统、悬架控制系统、制动防抱死控制系统(ABs牵引力控制系统、AsR控制系统、仪表管理系统、故障诊断系统、中央门锁系统、座椅调节系统等。
封面作者:PanHongliang仅供个人学习CAN总线数据通信系统的设计摘要现场总线是当今自动化领域技术发展的热点之一,被誉为自动化领域的计算机局域网。
它的出现为分布式控制系统实现各节点之间实时、可靠的数据通信提供了强有力的技术支持。
CAN(ControllerArea Network)属于现场总线的范畴,是一种多主方式的串行通讯总线,数据通信实时性强。
与其它现场总线比较而言,CAN总线具有通信速率高、容易实现、可靠性高、性价比高等诸多特点。
本系统要在单片机中实现CAN总线的接口,通过CAN总线,实现两个模块之间的数据通讯。
系统主要由四部分所构成:PC机、微控制器80C51、独立CAN通信控制器SJA1000和CAN总线收发器PCA82C250。
微处理器80C51负责SJA1000的初始化,通过控制SJA1000实现数据的发送和接收等通信任务。
CAN总线节点的软件设计主要包括三大部分:CAN节点初始化、报文发送和报文接收。
本系统通过扩展CAN总线控制器SJA1000,在单片机系统中实现了CAN总线的接口,并且编写了SJA1000的驱动程序,通过读写其的内部寄存器,完成工作方式的设置、接收滤波方式的设置、接收屏蔽寄存器(AMR)和接收代码寄存器(ACR)的设置、波特率参数设置和中断允许寄存器(IER)的设置等基本操作;利用各基本操作,完成了对SJA1000的初始化,并且实现了数据发送和接收。
目录第1章原理与方案31.1设计目的与要求31.2CAN总线介绍31.3设计方案31.3.1 硬件设计方案41.3.2 软件设计方案5第2章硬件连接与说明52.1硬件连接52.1.1 模块使用说明52.1.2 实验箱连线62.2CAN总线控制器SJA100062.3CAN控制器接口PCA82C2506第3章软件流程图及说明错误!未定义书签。
3.1软件流程图73.1.1 主程序流程图73.1.2 初始化子程序流程图73.1.3 发送数据子程序流程图错误!未定义书签。
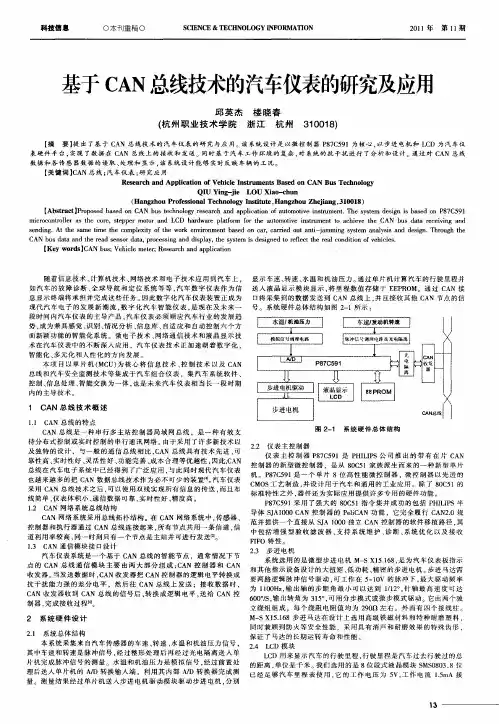
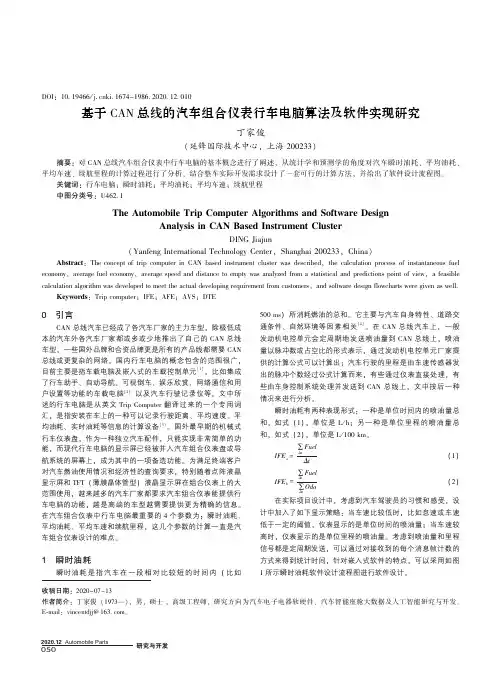
图1㊀瞬时油耗软件设计流程2 平均油耗平均油耗是指用户通过按键操作清零后开始的一段相对较长的时间内(比如一个月)汽车所消耗的燃油量,这是一个统计平均值,用这段时间所消耗的燃油与行驶的里程数的比值来表示㊂这里的平均油耗是实际油耗,除了和汽车自身特性㊁道路交通条件㊁自然环境相关外,还和驾驶员的驾驶习惯等因素相关[5]㊂按照概念,平均油耗的基本计算公式为:AFE cal =ðT _next _resetT _resetfuel _consumption ðT _next _resetT _resetOdo (3)如果用户两次按键清零之间累计的时间足够长,式(3)计算出来的结果完全可以用来衡量该汽车的燃油经济性,但它有个很明显的缺点:从公式中分母可知,如果累计里程非常小,特别是车还处于低速甚至是怠速停止的状况下,计算出来的AFE 将会非常大,那就会导致用户感觉耗油量巨大的错觉,从而怀疑整车的质量性能,在这种情况下必须引入理论油耗作为参考参数, 理论油耗 是指汽车厂商按照国家标准规定的温度㊁风向㊁风速等客观环境要求下,使汽车在平坦路面(机场路面)或在底盘测功机上保持一定车速等速行驶(一般有60㊁90,120km /h 3种选择),然后通过专业方法(一般有图2㊀平均油耗的软件设计流程图3㊀平均车速的软件设计流程续航里程续航里程是汽车油箱剩余油量可继续行驶里程,预测学的概念,需要根据以往燃油消耗量和已经行驶的里程来预测将来的平均油耗,从而和油箱剩余油量计算出可持续行驶其概念公式为:=Fuel_levelF_afe =Fuel level㊃Odo︿t+1Fuel︿t+1Fuel level为油箱剩余油量,一般通过油量传感器实时采由仪表直接处理或别的电控单元处理后发送到CAN Fuel︿t+1㊀t+1㊀为预测的油耗㊂图4㊀续航里程软件设计流程。
基于CAN总线的电动汽车数字仪表开发刘涛;李连强;滑文山;孙辉安【摘要】开发了一款基于CAN总线的电动汽车数字仪表,该方案包括仪表总体设计方案的制定和系统软硬件的设计.电动汽车仪表系统采用了NEC公司的μ78F0822B控制芯片,以步进电机表头和LCD液晶屏为主要的驱动显示器件,对电机转速、车速、电机温度、气压等以及状态报警信号等进行实时显示.对于车辆信号的采集,在保留传统点对点式的信号采集方式的基础上采用CAN总线的通信方式.【期刊名称】《农业装备与车辆工程》【年(卷),期】2013(051)005【总页数】4页(P54-57)【关键词】CAN总线;电动汽车;数字仪表【作者】刘涛;李连强;滑文山;孙辉安【作者单位】266043山东省青岛市一汽解放青岛汽车有限公司;266043山东省青岛市一汽解放青岛汽车有限公司;255049山东省淄博市山东理工大学交通与车辆工程学院;255049山东省淄博市山东理工大学交通与车辆工程学院【正文语种】中文【中图分类】U469.720 引言汽车仪表是驾驶员最直接、最直观地了解汽车车况的平台。
随着汽车工业的快速发展,人们对汽车安全、节能、环保和车载信息娱乐系统等方面要求的不断提高,汽车电子控制的复杂程度变得越来越高。
数据统计表明,目前汽车电子控制装备已经占到了整车价格的30%左右,且越高档的车这个比重占得越高。
复杂的电子控制系统在提高了汽车品质的同时,也使得现代汽车的信息容量以及电磁复杂化程度发生了很大变化[1]。
为了及时了解车况信息以及各电控单元的工作状态,传统的机械电气式仪表已经不能满足更高层次的要求,因此发展性能更好,集成度更高,集合更多信息量的嵌入式数字化仪表是必然的趋势[2-3]。
1 系统方案根据目前国内外汽车仪表的发展现状和要求,以及通过对汽车仪表系统基本功能的分析研究,本文设计了一款基于CAN总线的电动汽车组合仪表。
该仪表除了能实时采集模拟信号、数字脉冲信号和数字开关信号外,其最大的特点是仪表节点能从CAN总线获取驱动电机控制单元、电池管理系统以及其它汽车行驶状态的有关信息。

汽车CAN通讯总线全面解析一起解读CAN通讯总线:日新月异,随着时代的高速发展,汽车电子技术不断更新,所以我们要通过不断的学习来提高技术水平。
本期我们一起解读汽车CAN 通讯总线,从CAN的由来、原理、设计、应用以及维修,一篇文章全方面解析读懂CAN通讯!CAN通讯总线的由来由于消费者对于汽车功能的要求越来越多,而这些功能的实现大多是基于电子操作的,这就使得电子装置之间的通讯越来越复杂,同时意味着需要更多的连接信号线。
提出CAN总线的最初动机就是为了解决现代汽车中庞大的电子控制装置之间的通讯,减少不断增加的信号线。
CAN通讯的起源1983年首先由德国的博世BOSCH公司设计了CAN数据总线,越来越多的车辆采用了CAN数据总线,使车上的各个电脑可以被挂接在该总线上都能进行数据交流,形成车载网络系统。
“什么是CAN总线?”汽车不管有多少块电控单元,不管信息容量有多大,每块电控单元都只需引出两条线共同接在两个节点上,这两条导线就称作数据总线,亦称BUS线。
整个网络则称CAN,CAN是Controller Area Network(控制单元区域网络)的缩写,意思是控制单元通过网络交换数据。
CAN-BUS总线形象介绍:公交车:车辆通讯CAN总线:作一个比喻:总线系统又称作CAN-BUS,其实也是因为它的工作原理与运行中的公共汽车很类似。
其中每个站点相当于一个控制单元,而行驶路线则是CAN总线,CAN总线上传递的是数据,而公共汽车上承载的是乘客。
某个控制单元接收到负责向它发送数据的传感器的信息后,经过分析处理会采取相应措施,并将此信息发送到总线系统上。
这样此信息会在总线系统上进行传递,每个与总线系统连接的控制单元都会接收到此信息,如果此信息对自己有用则会存储下来,如果对其无用,则会进行忽略。
CAN总线的通讯原理:第一种『每项信息都通过各自独立的数据线进行交换』目前在车辆上应用的信息传递形式有两种。
第一种是每项信息都通过各自独立的数据线进行交换。
基于CAN总线的车载智能仪表设计
肖朝晖;李山
【期刊名称】《自动化与仪表》
【年(卷),期】2005(20)3
【摘要】介绍了CAN总线的技术特点,给出了基于CAN总线的车载仪表的设计.【总页数】3页(P31-33)
【作者】肖朝晖;李山
【作者单位】重庆工学院,计算机学院,重庆,400050;重庆工学院,计算机学院,重庆,400050
【正文语种】中文
【中图分类】TP393.1;U463.7
【相关文献】
1.基于CAN总线的智能仪表设计 [J], 赵春平;张健涛;张会康;蒋媛
2.基于CAN总线的基站式智能仪表设计 [J], 冯晗
3.基于CAN总线技术的汽车智能仪表设计 [J], 白月飞;杨斌
4.基于CAN总线协议车载网关双缓冲区的设计研究 [J], 张晓光;陶英轩;黄金山
5.基于CANoe的车载CAN总线监控系统的设计 [J], 刘鑫爽;程洋
因版权原因,仅展示原文概要,查看原文内容请购买。