EH-1003HS带材纠偏控制系统
- 格式:pdf
- 大小:567.69 KB
- 文档页数:18
EMG纠偏系统中圣板带EMG纠偏系统纠偏CPC系统手册第1页--共45页EMG纠偏系统中圣板带目录项目背景 (4)1.纠偏CPC系统 (4)1.1系统描述 (4)1.2功能原理 (5)2.工艺参数-电气设备 (6)3.带BMI2.11.X检测电路的感应式测量架(CAN-BUS通讯) (7)3.1通过CAN OPEN界面过程数据传输 (9)3.2接收器的测定刻度校正: (11)3.3发送器和接收器矫正任务的检查: (11)4.使用BMI2.11.X CANBUS-电路调节倾斜度 (11)4.1、检查传感器的监测 (12)4.2通过钢板测试样品进行检查 (13)4.3检查-线圈的矫正(发送器←→接收器) (13)4.4信号“M ESSEINRICHTUNG OK”(测量设备OK) (14)4.5信号“B ANDLAGE OK”(带钢位置OK) (15)5.操作及参数设置 (16)5.1调试检验 (16)5.2通过ECU01进行控制系统的参数设置 (16)5.3操作模式控制 (18)5.4主系统与EMG单体设备系统连接通过PROFIBUS实现/可选 (20)5.4.1SPC16控制系统MCU24.2 (20)5.4PROFIBUS用户地址设置 (22)5.5EMG传感器连接CAN OPEN (23)5.6CAN-BUS的终端连接 (24)5.7在CAN-BUS上的用户地址定义 (24)5.8手动速度选择 (24)5.9线性位移传感器KLW的(位置)调节 (25)5.9.1线性位移传感器零点位置调节 (26)5.9.2线性位移传感测量方向调节 (26)5.9.3线性位移传感器量程标定 (26)5.10对中模式 (27)第2页--共45页EMG纠偏系统中圣板带5.11自动模式-有位置反馈 (28)5.12通过电位计实现板带对中控制 (28)6.对于标准程序的故障处理: (29)7.附件 (32)7.1MCU24.PRM参数文件(基本的出厂设置) (32)7.2拨码开关DIL-SWITCHES的位置 (33)7.3参数表-通过ECU01键盘可以调出参数清单 (34)7.4测量值表 (36)7.5PROFIBUS-DP接口表 (39)8.典型故与处理 (42)8.1CPC2跑偏故障分析 (42)8.2CPC1准备好信号没有封点办法 (42)8.3炉子纠编报错 (45)第3页--共45页EMG纠偏系统中圣板带项目背景在带钢处理线上,带钢的跑偏可能由于不同的原因所产生,跑偏可能导致产品的损坏或生产设备的损坏。
某厂EH油及调节保安系统调试措施为了确保EH油及调节保安系统的正常运行,需要进行以下调试措施:1.检查设备:先对EH油及调节保安系统的各个设备进行检查,确保其完好无损并符合要求。
包括检查传感器、开关、阀门等设备状态是否正常,确保其能够正常工作。
2.连接设备:将EH油及调节保安系统的各个设备进行正确连接。
确保传感器等设备与控制器之间的连接稳固可靠,能够正常传递信号。
同时,还要检查控制器与电源之间的连接,确保电源供应正常。
3.设置参数:根据实际情况,对EH油及调节保安系统的参数进行设置。
如设定安全温度范围、压力范围等参数,确保系统能够在设定的范围内正常运行。
4.校准传感器:对EH油及调节保安系统的传感器进行校准。
通过与标准设备进行比对,确定传感器的准确度和灵敏度。
校准后,保证传感器能够准确地检测温度、压力等参数。
5.进行功能测试:对EH油及调节保安系统的各项功能进行测试。
如测试报警功能、自动控制功能、手动控制功能等。
确保系统能够按照设定的要求正常工作,并能够及时发出报警或执行相应的动作。
6.进行模拟测试:采用模拟测试的方式,模拟出不同的工作环境和工况。
通过改变温度、压力等参数,测试系统在不同情况下的响应能力和稳定性。
确保系统能够适应各种工况,并做出正确的反应。
7.数据记录和分析:对调试过程中的数据进行记录和分析。
包括温度、压力等参数的变化情况,以及系统的响应时间、稳定性等指标。
通过分析数据,找出系统存在的问题,并进行改进和优化。
8.安全保障:在调试过程中,要确保操作人员的安全。
使用正确的工具和设备,穿戴符合要求的防护装备。
同时,还要遵守相关的安全操作规程,确保调试过程中不会对人身和设备造成损害。
9.培训操作人员:在调试完成后,对操作人员进行培训。
包括系统的正常操作流程、常见故障处理方法等。
确保操作人员能够熟练地操作EH油及调节保安系统,并能够及时排除系统故障。
通过以上调试措施,可以保证EH油及调节保安系统的正常运行。
EMG带钢纠偏系统在冷轧的应用与及维护I. 绪论A. 研究背景及意义B. 现有问题分析C. 研究目的II. EMG带钢纠偏系统的原理介绍A. 系统构成B. 工作原理C. 优点分析III. EMG带钢纠偏系统在冷轧中的应用A. 系统使用流程B. 应用场景分析C. 应用效果评估IV. EMG带钢纠偏系统维护及故障排除A. 系统维护方法B. 故障排除流程C. 维护经验总结V. 未来研究方向A. 研究现状分析B. 发展趋势预测C. 优化设计建议VI. 结论A. 研究成果总结B. 研究意义再探讨C. 后续发展策略建议I. 绪论A. 研究背景及意义随着冷轧带钢的需求不断增加,带钢纠偏系统在钢铁工业中的应用也逐渐扩大。
然而,传统的带钢纠偏系统存在一些缺陷,如操作不便,维护困难,精度不高等问题。
针对这些问题,人们提出了一种新型的带钢纠偏系统-- EMG带钢纠偏系统,该系统采用电磁力平衡技术和精密传感技术,可以实现高精度的纠偏效果。
B. 现有问题分析传统的带钢纠偏系统采用机械力平衡技术,由于机械部件易于磨损,且常常受到环境温度变化等因素的影响,其纠偏精度较低。
此外,传统的带钢纠偏系统操作复杂,维修困难,而且在长期使用过程中,会逐渐失去灵活性和纠偏精度,从而导致带钢加工出现误差。
C. 研究目的本论文旨在探讨 EMG带钢纠偏系统的原理、应用及维护。
通过对该系统的研究分析,我们可以深入了解其原理和应用特点,为该系统的普及和推广提供理论支持。
此外,本论文还会探讨EMG带钢纠偏系统的维护方法和故障排除流程,为用户提供了可靠的维护保障。
最后,我们将在总结中展望该系统的未来发展方向,以期为相关领域的研究和实践提供一定的借鉴和指导。
II. EMG带钢纠偏系统的原理介绍A. 系统构成EMG带钢纠偏系统主要由电磁力平衡装置、带钢传感器、控制系统和供电系统等组成。
其中,电磁力平衡装置是核心部件,采用电磁力平衡技术,可生成与带钢误差方向相反的力矩,从而实现带钢纠偏。
E+L-EPC纠偏系统说明书本说明适用于德国E+L纠偏常规产品目录E+L-EPC纠偏系统说明书 (1)一、E+L-EPC纠偏系统总体说明 (3)二、E+L-EPC纠偏系统所需零件说明 (4)三、E+L-EPC纠偏系统机械安装说明 (5)3.1、控制器的安装 (5)3.2、电眼的安装 (5)3.2.1、通过EPC纠偏应用场合确认电眼安装位置 (5)3.2.2电眼的安装要求 (6)3.3、电机的安装 (6)3.3.1、确定电机型号 (6)3.3.2、确定电机机械中心 (7)3.3.3、调整电机机械中心 (7)3.3.4、安装电机 (7)3.4接近开关的安装 (7)3.4.1、接近开关感应片 (7)3.4.2、接近开关安装位置 (7)四、E+L-EPC纠偏系统配线说明 (10)4.1确认电压 (10)4.2、电机线布线要求 (10)4.3、E+L布线要求 (10)五、E+L-EPC纠偏面板说明 (10)六、E+L-EPC纠偏系统参数设定 (11)6.1、CAN网络群组地址设定 (11)6.1.1、RK4004地址设定 (11)6.1.2、FR5001电眼地址设定 (12)6.2、RK4004参数设定 (13)七、E+L-EPC纠偏系统试车 (15)八、E+L-EPC纠偏系统维护及故障说明 (15)8.1、EPC纠偏系统日常维护 (15)8.2、通过RK4004错误码信息来解决故障 (15)8.3、通过FR5001电眼错误码信息来解决故障 (16)九、附件 (17)附件一、电机尺寸图附件二、电机参数值附件三、EPC标准接线图纸附件四、RK4004控制板参数设定手册一、E+L-EPC纠偏系统总体说明我们将用一个电眼检测材料边缘来纠偏的纠偏系统称为EPC(Edge psoition control),以下简称EPC。
我们将用两个电眼检测材料中心来纠偏的纠偏系统成为CPC(Center position control),以下简称CPC。

论文说明书——带材纠偏装置控制系统(24页)一、项目背景随着我国工业自动化水平的不断提高,各类生产线对带材的质量要求也越来越高。
在实际生产过程中,带材跑偏现象时常发生,这不仅影响了生产效率,还可能导致产品质量下降。
为解决这一问题,我们研发了一套带材纠偏装置控制系统,旨在提高生产线的稳定性和带材的精度。
二、研究目的与意义1. 研究目的本论文旨在设计一套带材纠偏装置控制系统,通过对带材运行过程中的实时监测与调整,实现带材自动纠偏,降低生产过程中的故障率,提高生产效率。
2. 研究意义(1)提高带材生产线的自动化程度,减轻操作工人的劳动强度;(2)确保带材在生产过程中的稳定运行,提高产品质量;三、系统设计原理1. 系统概述带材纠偏装置控制系统主要由检测部分、控制部分和执行部分组成。
检测部分负责实时监测带材的运行状态,控制部分根据检测到的数据进行分析处理,并输出控制信号,执行部分根据控制信号对带材进行纠偏。
2. 系统设计原理(1)检测部分:采用高精度传感器,实时监测带材的运行位置;(2)控制部分:采用PLC(可编程逻辑控制器)作为核心控制器,实现对检测数据的处理和分析;(3)执行部分:通过伺服电机驱动纠偏机构,实现对带材的实时纠偏。
四、系统硬件设计1. 传感器选型根据生产现场的实际需求,本系统选用精度高、响应速度快的光电传感器作为检测元件。
2. 控制器选型本系统选用性能稳定、抗干扰能力强的PLC作为核心控制器,实现对整个系统的实时监控与调整。
3. 执行机构选型根据纠偏力矩和响应速度的要求,本系统选用伺服电机驱动纠偏机构,确保带材在高速运行过程中的纠偏效果。
五、系统软件设计1. 软件架构带材纠偏装置控制系统的软件部分采用模块化设计,主要包括主控模块、检测模块、纠偏模块、通信模块和人机交互模块。
这样的设计便于后期维护和功能扩展。
2. 程序设计(1)主控模块:负责整个系统的启动、停止和异常处理,确保系统稳定运行;(2)检测模块:实时采集传感器数据,对带材位置进行监测;(3)纠偏模块:根据检测模块提供的数据,计算纠偏策略,并输出控制信号;(4)通信模块:实现PLC与上位机之间的数据交换,便于监控和调试;六、系统调试与优化1. 系统调试在硬件安装完成后,我们对带材纠偏装置控制系统进行了详细的调试。
el纠偏控制器说明书标题:EL纠偏控制器说明书一、引言EL纠偏控制器是一种先进的电子设备,可广泛应用于印刷、纺织、制药等行业中的卷材自动化生产过程中。
本文将全面介绍EL纠偏控制器的原理、功能和使用方法,以帮助用户正确有效地使用该设备。
二、原理及功能1.原理:EL纠偏控制器采用先进的传感技术,能够实时监测卷材的位置偏差,并通过精确的调整控制,使其保持正常的位置。
2.功能:(1)位置检测:EL纠偏控制器能够准确地识别卷材位置的偏差,并以高精度传感器的形式将数据反馈给控制系统。
(2)自动调整:根据位置偏差数据,EL纠偏控制器能够自动调整卷材的运动轨迹,使其恢复正常位置。
(3)速度控制:EL纠偏控制器可根据实际情况灵活调整卷材的运动速度,确保其在高速运行中仍能保持正常位置。
(4)报警功能:EL纠偏控制器配备了智能警报系统,当控制过程中出现异常情况时,能够及时报警,并停止卷材运动,确保生产安全。
三、使用方法1.安装:将EL纠偏控制器正确安装在卷材自动化生产设备中,并确保传感器与卷材的接触良好。
2.参数设置:根据实际生产需要,按照操作手册指导,设置合适的参数,包括位置偏差范围、控制灵敏度等。
3.启动和校准:按照操作手册的说明,正确启动EL纠偏控制器,并进行设备校准,确保其工作准确。
4.监测和调整:在卷材生产过程中,及时监测EL纠偏控制器的工作状态,如发现异常,及时调整参数或联系维修人员进行检修。
5.维护与保养:定期对EL纠偏控制器进行维护保养,保持设备的正常工作状态,防止灰尘、水分等对设备的影响。
四、注意事项1.请勿随意更改参数:不得随意更改EL纠偏控制器的参数,以避免引起不必要的错误。
2.权威人员操作:使用EL纠偏控制器时,请确保由经过培训并具备相关知识的专业人员操作,以确保安全和设备正常运行。
3.防止外力干扰:请注意防止外界因素对EL纠偏控制器的影响,避免撞击、水淋等情况。
4.异常情况报警:若EL纠偏控制器发出报警,请立即停止卷材运动,并进行排查处理。
带材纠偏控制器的基本原理
韩春元;杨晓翠;由明扬;徐新;孙雨兰;陶海峰
【期刊名称】《黑龙江科技信息》
【年(卷),期】2012(000)019
【摘要】带材纠偏控制器的基本原理是:由发射器H3177发射光,经接收器
H3178接收,将信号送给控制器H8800,经它处理后送给执行机构-伺服阀,进而控制卷材移动,实现卷材对中。
其原理框图如图1所示。
【总页数】1页(P69-69)
【作者】韩春元;杨晓翠;由明扬;徐新;孙雨兰;陶海峰
【作者单位】东北轻合金有限责任公司,黑龙江哈尔滨150060;东北轻合金有限责任公司,黑龙江哈尔滨150060;东北轻合金有限责任公司,黑龙江哈尔滨150060;东北轻合金有限责任公司,黑龙江哈尔滨150060;东北轻合金有限责任公司,黑龙江哈尔滨150060;东北轻合金有限责任公司,黑龙江哈尔滨150060
【正文语种】中文
【中图分类】TP273
【相关文献】
1.基于MATLAB的带材纠偏电液伺服控制系统的分析 [J], 寇雪芹;闫沫
2.光电式带材纠偏系统设计 [J], 毛敏
3.一种磁力带材纠偏装置设计 [J], 王丽华
4.基于重复控制的织物类带材新型纠偏系统 [J], 陈德传;彭庆海
5.基于模糊PID的自适应软包装带材边缘纠偏系统 [J], 杨桂府
因版权原因,仅展示原文概要,查看原文内容请购买。
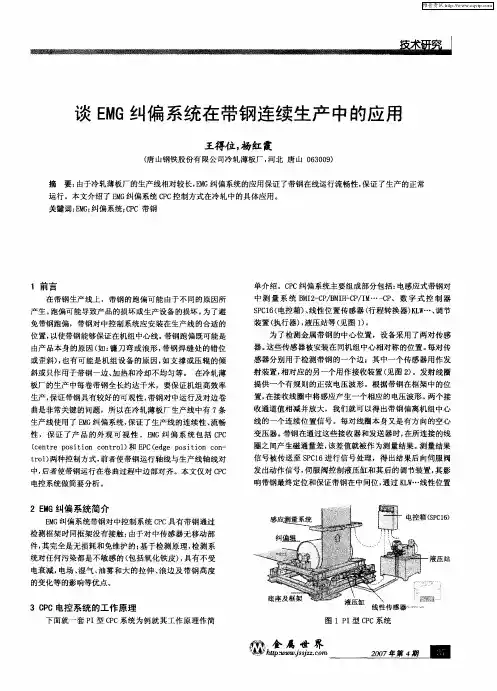
EH-1003HS带材纠偏控制系统一带材纠偏系统工作原理钢铁、橡胶、造纸等工业企业在对带材进行生产或加工过程中,需要将带材准确无偏地送入下道工序机组。
但是,由于外界的各种因素的影响,总会造成偏差。
为了保证产品质量及满足正常生产或加工的需要,就得使用纠偏系统,通过自动调节来消除偏差,使带材中心始终被控制在生产线的中心。
系统主要由CSEC-20电液伺服控制器(其中包括红外宽光束对中传感器、电液伺服放大器和泵电机启动装置等)、油缸(用户自备),位移传感器(CRDB-A)、电液伺服阀(CSV8系列),液压站(CHPS)等元器件组成。
光电传感器的检测器是成对使用,其对称中心与生产线中心是一致的。
在生产过程中,当带材中心偏离生产线机械中心时,两光电传感器被遮挡部分面积就不一样,因此其输出两个大小不同的电信号至前置放大器,通过前置放大器相加运算后,输出一个与帘子布位置偏差大小、方向有关的电信号至主放大器,主放大器输出一电流信号给伺服阀动圈以控制伺服阀的方向与流量;伺服阀控制油缸,使位移-摆动辊偏移,同时带动位移传感器,使位移传感器也输出一反相信号给主放大器,此信号使伺服阀输出减小;当此信号与前置放大器输出信号等值反相时,伺服阀输出为零,位移-摆动辊停止运动,此时辊与起始位置有一位移并成一角度,带材在这一位移与角度作用下产生位移-螺旋效应;直至偏差消除,两光电检测器输出电压一致,前置放大器输出为零,位移-摆动辊偏角也回到零,即起始位置,此时带材中心与生产线机械中心无偏差。
如再有偏差,则重复上述过程,从而达到连续纠正偏差的目的。
整个系统是逐级推动、闭环工作的。
元件故障与调整不当都可能使系统失常。
在系统中如出现故障,应根据情况具体分析、区别对待,切忌非专业人员乱拆乱调,以免损失纠偏精度。
二系统框图见下页《带材纠偏系统示意图》三电气原理及连接图四组成系统的各元部件1. GD5A-400H或GD5A-200H光电检测器;2. CSEC-20电液伺服控制器;3. CRDB-A位移传感器;4. CSV8电液伺服阀;5. CHPS-25 (30或40)纠偏控制系统液压站。
五伺服控制系统接线图CSEC-20电液伺服控制器一. 概述CSEC-20电液伺服控制器是为钢铁、橡胶、造纸等行业进行非透明带材连续纠偏(CPC)的专用配套控制器。
它主要由宽光束红外对中光电检测传感器(包括检测器及前置放大器)、电液伺服放大器及泵电机驱动等部分组成。
红外光电传感器的检测宽度变化范围最大可达400mm,所以被测带材宽度有较大变化时,也不必改变检测器的相对位置,由于采用红外调制光源,故该传感器具有灵敏度高,抗干扰能力强的特点,可以在明暗变化很大的环境下长期可靠地工作。
电液伺服放大器采用共地端的电流负反馈形式,故输出电流不受引线电阻变化的影响,无论负载本身短路,还是输出线对地短路,都不会损坏电子部件。
由于上述原因,所以本伺服控制器具有工作寿命长,可靠性高的特点。
并且能外接本所制造的GD6A、GD8A等光电传感器以进行带材边缘的伺服控制。
二. 控制器电气原理框图参见下页《电液伺服控制器电气原理框图》。
三. 工作原理参见《电液伺服控制器电气原理框图》两发光源射出的红外调制光,分别被接收源的光电池所接收,并输出脉冲电压信号,经同步介调后输出同相位的直流电信号,这两信号各自进行可控放大后,进入减法器进行相减,然后通过“自动/手动/中位”状态选择开关进入前置放大,进入前置放大的信号除了光电信号外,还有电流反馈信号,位置反馈信号等,这些信号叠加后再经功率放大,然后驱动伺服阀控制执行机构动作。
当两接收部所接收的光强相等时,也就是说两检测器被带材所遮挡的面积相等时,则输出信号为零,当带材偏离中心位置时两检测器受光面积就发生变化,输出信号也就向正或向负偏移,其偏移的大小与两检测器受光面积之差成正比。
发光源发出调制光的同时也被内部检测器所检测,当由于某种原因使某一光源或两光源发生故障不工作时,检测器输出单一信号或无信号,此时断光指示闪亮并驱动继电器J吸合,使信号输出为零以锁定油缸,防止系统失控。
(外接光电传感器输入时无此功能,D1灯常亮。
)控制器内设有颤振信号发生器,可在输出信号中叠加一脉动信号以提高伺服阀的分辨率,颤振电流可在0~100mA(峰-峰值)范围内调节,颤振频率可在45~150Hz内进行选择。
四. 控制器主要技术指标检测宽度变化范围: 200mm(或400mm)光源部: 红外线发光二极管接收部: 硅光电池检测间距: 70mm分辨率: 0.2mm(不透明带材)输出电流: 0~±300mA额定负载阻抗: 30Ω颤振幅度: AC 0~100mA 可调(三角波)电源: ~380V 三相四线五. GD5A-400H 检测器外形图(注:1.检测器检测范围有400mm和200mm两种,选购时须注明。
2.此为单件,正常使用时须成对配套,即铭牌上产品编号须一致。
)六. CSEC-20 电液伺服控制器外形图各电缆插型号光电检测器I:CX16Z5FG光电检测器II:CX16Z5FM位移传感器:CX16Z4FG伺服阀线圈:CX16Z3FMCRDB-A位移传感器CRDB-A是一种以导电塑料电位器作检测元件的位移传感器,用于自动控制系统中作位移检测和闭环位置反馈。
注意传感器必须经调试方能在系统中使用!一有效检测行程和线性精度:CRDB-A-100-05 有效检测行程±100mm,线性精度0.5%CRDB-A-100-02 有效检测行程±100mm,线性精度0.2%CRDB-A-100-01 有效检测行程±100mm,线性精度0.1%二传感器固定和连接方法:如图一所示(作执行油缸的位移检测时),拉尺必须和油缸杆平行;当缸杆伸出最短时,必须保证拉尺伸出80~100mm(从拉尺压板头算起),即要有一定的预紧力,必要时请安装防护罩。
三调试(见图一CRDB传感器安装图)1.首先使油缸处于机械中位(即保证机组机械执行机构处于设定零位)。
2.按图三(CRDB-A位移传感器结构)。
a.打开后盖1。
b.旋松紧定螺钉3。
c.用螺丝刀调节旋转轴2,使传感器的输出为零(即放大器电流表的指示为零)d.旋紧紧定螺钉。
此时CRDB-A传感器调零完毕,按装好后盖,系统即可投入运行。
四主要技术性能:电源电压: ±7V输出电压: ±5V(全行程时)线性精度: 0.1%,0.2%,0.5%任意选择分辨率: 无限标称阻值: 2K或5K额定功率: 2W (70℃)工作温度: -55℃~+125℃(检测元件)工作寿命: 50×106次(检测元件)CSV系列电液伺服阀CSV系列电液伺服阀是新一代动圈式电液伺服阀。
该阀具有性能稳定、频率响应好、可靠性高、调整维护简便等优点,广泛应用于机械、石油化工、冶金电力等领域的电液伺服控制系统中。
一工作原理与结构特点CSV系列电液伺服阀结构示意见图一,机能符号见图二。
磁钢在气隙中造成固定磁场,当电流流过气隙中的动圈绕组时,便产生电磁力,推动控制阀芯,使之产生与控制电流成比例的位移。
由于控制阀芯与主阀芯组成半桥液压放大器及两级直接位置反馈,因此主阀芯能跟随控制阀芯运动,也产生与控制电流成正比的位移。
伺服阀的主阀芯台肩控制棱边与阀套窗孔相应棱边的轴向尺寸是按零搭接精密配合的,所以输出流量的方向和大小取决于主阀芯位移的方向和大小,这样输出流量的大小在负载压力恒定的条件下就与控制电流的大小成正比。
CSV系列电液伺服阀没有细小的节流孔和狭窄的控制间隙,因此,对油液中的污垢不敏感。
由于主阀芯的位移较大,因此同样的磨耗量,对性能的影响较小,相当于延长了阀的使用寿命这就使CSV系列电液伺服阀有极高的使用可靠性,它能在各种液压系统中长期稳定地工作。
CSV系列伺服阀控制级采用半桥差动活塞结构,稳态时只有少量控制油液流过,因此,CSV系列电液伺服阀可以在31.5MPa的高压下使用而没有太大的空耗;又由于控制级有较高的流量增益,因此,即使在7MPa以下的低压系统中也能得到满意的性能。
根据用户的需要,研究所甚至可以为用户生产油源压力为1MPa的电液伺服阀,这是其他类型电液伺服阀难以达到的。
二型号说明例:CSV8-F40表示:CSV8型电液伺服阀,工作压力20MPa,额定流量40L/min,线性开口,无主阀芯监测传感器。
三规格性能四外形尺寸及连接尺寸CSV系列伺服阀插座接线位置见图六CSV8型电液伺服阀的外形与连接尺寸见图七。
CSV10型电液伺服阀的外形与连接尺寸见图八。
伺服阀连接板上安装定位销处应钻一Φ4深4孔,伺服阀定位销插入其中,防止进出油口接反。
连接板安装面光洁度不低于“粗糙度1.6”附一:CMSV8机械伺服阀使用说明书CMSV8阀是专用伺服阀,主要用于锻压机械和其它类似用途的行业。
它的主要性能与CSV8相同,采用同一阀体,具有抗污染性能强,使用方便等优点,区别在于CSV8用电信号控制阀的流量,而CMSV8采用凸轮(模板)或杠杆推动触头实现流量控制。
型号说明:规格型号CHPS-25纠偏控制系统液压站一概述CHPS-25液压站是专为帘子布或其它带材纠偏控制系统而设计制作的液压动力源。
它是由电机、进口叶片泵、单向阀、溢流阀、耐震压力表,精滤器、冷却器、空气滤清器等元件组成。
油箱额定容积125L,电机功率2.2KW(或3KW),其流量Q=14升/分,P=7MPa,调压范围4~6MPa。
二液压系统原理图三液压系统工作原理参见《液压系统原理图》,油液由油泵从油箱内吸入,经单向阀后分为二路,一路经电磁阀(用于自动手动转换)向电液伺服阀供油,另一路流向手动电磁阀,当伺服阀被脏物所堵时即可用手动方法对油缸进行操控,油缸速度由双单向节流阀调定。
油泵的出油同时经压力表和溢流阀,系统的压力由溢流阀调定,压力表上可反映所调定的工作压力。
溢流阀、伺服阀的回油经冷却器、精滤器后回油箱。
精滤器由滤油器和电接点压差表组成,过滤精度为20μ。
电接点压差表是防止纸质滤芯被堵后背压升高而造成其破裂的保护装置。
当滤油器进出油口压差达到0.35MPa时其表针指示会进入红色报警区域,并会接通触点。
用户可通过触点自接报警装置,触点容量为24V1A。
油液温度由温度计显示。
当油温达到50℃时应接通冷却水,使其进入冷却器进行循环冷却。
系统正常运行时,油温应控制在50℃以下。
四 CHPS-25液压站外形图注:CPC系统要求阀块出口管接头外端螺纹M18×1.5。