基于互补滤波器的四旋翼飞行器姿态解算_梁延德
- 格式:pdf
- 大小:511.64 KB
- 文档页数:4
互补滤波算法在四旋翼飞行器姿态解算中的应用
万晓凤;康利平;余运俊;林伟财
【期刊名称】《测控技术》
【年(卷),期】2015(034)002
【摘要】针对四旋翼飞行器飞行过程中的姿态最优估计问题,本着准确、快速的原则,选择了基于陀螺仪、加速度计和电子罗盘的捷联式惯性测量系统.由于这些传感器存在温度漂移和噪声干扰等问题,采用互补滤波算法,通过融合IMU多传感器的数据信号,对测得的姿态数据进行补偿修正,解算出高精度的姿态角.为了验证互补滤波算法的有效性和实用性,通过实际的四旋翼飞行器角度测量系统对互补滤波算法展开研究.结果表明姿态角解算中采用互补滤波算法能够快速、稳定的输出高精度姿态数据,姿态角最大跟踪误差控制在±2°以内,满足四旋翼飞行器飞行控制的要求,成功完成了姿态的最优估计.
【总页数】4页(P8-11)
【作者】万晓凤;康利平;余运俊;林伟财
【作者单位】南昌大学电气与自动化工程系,江西南昌330031;南昌大学电气与自动化工程系,江西南昌330031;南昌大学电气与自动化工程系,江西南昌330031;南昌大学电气与自动化工程系,江西南昌330031
【正文语种】中文
【中图分类】TP274.2
【相关文献】
1.基于自适应互补滤波的四旋翼飞行器姿态解算 [J], 陈华胄;谌海云
2.基于互补滤波器的四旋翼飞行器姿态解算 [J], 梁延德;程敏;何福本;李航
3.基于非线性互补滤波算法的四旋翼飞行器姿态信息融合处理 [J], 孙菁宇;高国伟;潘宏生;毛瑞燕
4.基于互补滤波算法的四旋翼飞行器姿态和高度解算 [J], 肖宇
5.卡尔曼滤波在四旋翼飞行器姿态解算中的应用 [J], 杭成;朱海霞;许毅立;苑家玮因版权原因,仅展示原文概要,查看原文内容请购买。
![一种基于改进四元数二阶互补滤波的飞行器姿态解算方法[发明专利]](https://uimg.taocdn.com/b2bd4a4b284ac850ac024261.webp)
专利名称:一种基于改进四元数二阶互补滤波的飞行器姿态解算方法
专利类型:发明专利
发明人:周翟和,钟雨露,伏家杰,曾庆喜,孔德明,田祥瑞,游霞,陈燕
申请号:CN201810285907.5
申请日:20180329
公开号:CN108827299A
公开日:
20181116
专利内容由知识产权出版社提供
摘要:本发明提出的一种基于改进四元数互补滤波的飞行器姿态快速收敛方法,属于数字滤波和多传感器数据融合技术领域,主要作用于飞行器姿态解算系统中,使之获得准确的姿态角便于进行后续姿态控制。
该方法采用加速度计和磁力计的误差值经过PI调节后对陀螺仪进行补偿和校正,并在飞行器的启动阶段自适应的调节滤波器截止频率,用补偿后的陀螺仪数据去更新四元数并归一化,再用更新后的四元数计算出姿态变换矩阵并解算出姿态角。
本发明不仅具有传统互补滤波不需对噪声精确建模的优点,而且飞行器初始姿态收敛速度快,获得精确姿态角,同时减少滤波算法计算量,实现飞行器的快速平稳启动,增强其稳定性能。
申请人:南京航空航天大学
地址:211106 江苏省南京市秦淮区御道街29号
国籍:CN
更多信息请下载全文后查看。

姿态解算一、主线姿态表示方式:矩阵表示,轴角表示,欧拉角表示,四元数表示。
惯性测量单元IMU(Inertial Measurement Unit):MPU6050芯片,包含陀螺仪和加速度计,分别测量三轴加速度和三轴角速度。
注意,传感器所测数据是原始数据,包含了噪声,无法直接用于飞行器的姿态解算,因此需要对数据进行滤波。
滤波算法:非线性互补滤波算法,卡尔曼滤波算法,Mahony互补滤波算法。
二、知识点补充加速度计和陀螺仪加速度计:加速度计,可以测量加速度,包括外力加速度和重力加速度,因此,当被测物体在静止或匀速运动(匀速直线运动)的时候,加速度计仅仅测量的是重力加速度,而重力加速度与R坐标系(绝对坐标系)是固连的,通过这种关系,可以得到加速度计所在平面与地面的角度关系也就是横滚角和俯仰角。
把加速度传感器水平静止放在桌子上,它的Z轴输出的是1g的加速度。
因为它Z轴方向被重力向下拉出了一个形变。
可惜的是,加速度传感器不会区分重力加速度与外力加速度。
所以,当系统在三维空间做变速运动时,它的输出就不正确了,或者说它的输出不能表明物体的姿态和运动状态。
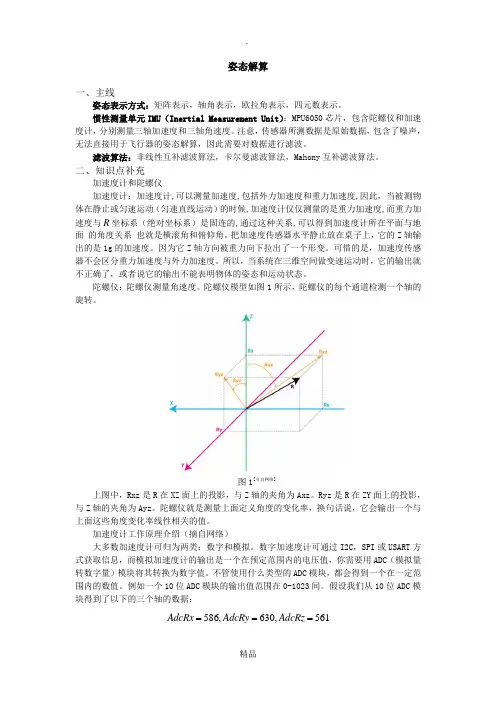
陀螺仪:陀螺仪测量角速度。
陀螺仪模型如图1所示,陀螺仪的每个通道检测一个轴的旋转。
图1[引自网络]上图中,Rxz是R在XZ面上的投影,与Z轴的夹角为Axz。
Ryz是R在ZY面上的投影,与Z轴的夹角为Ayz。
陀螺仪就是测量上面定义角度的变化率,换句话说,它会输出一个与上面这些角度变化率线性相关的值。
加速度计工作原理介绍(摘自网络)大多数加速度计可归为两类:数字和模拟。
数字加速度计可通过I2C,SPI或USART方式获取信息,而模拟加速度计的输出是一个在预定范围内的电压值,你需要用ADC(模拟量转数字量)模块将其转换为数字值。
不管使用什么类型的ADC模块,都会得到一个在一定范围内的数值。
例如一个10位ADC模块的输出值范围在0-1023间。
假设我们从10位ADC模块得到了以下的三个轴的数据:===586,630,561AdcRx AdcRy AdcRz每个ADC 模块都有一个参考电压,假设在我们的例子中,它是3.3V 。
![四旋翼无人机姿态解算方法、装置及终端设备[发明专利]](https://uimg.taocdn.com/3130733b240c844768eaee3b.webp)
专利名称:四旋翼无人机姿态解算方法、装置及终端设备专利类型:发明专利
发明人:张琳琳,梁建术,周浩玉
申请号:CN202010673805.8
申请日:20200714
公开号:CN111831962A
公开日:
20201027
专利内容由知识产权出版社提供
摘要:本发明提供了一种四旋翼无人机姿态解算方法、装置及终端设备,该方法包括:获取四旋翼无人机的陀螺仪数据和加速度计数据,并对陀螺仪数据和加速度计数据进行滤波处理;基于滤波处理后的陀螺仪数据进行四元数姿态更新,得到四元数转换矩阵,基于四元数转换矩阵对滤波处理后的加速度计数据进行误差计算,得到加速度计误差;对加速度计误差进行滤波处理,对滤波处理后的误差进行PI调节,得到误差补偿量;根据误差补偿量对滤波处理后的陀螺仪数据中的姿态角进行补偿,基于补偿后的姿态角进行四元数姿态更新,得到四旋翼无人机的解算姿态角。
本发明提供的四旋翼无人机姿态解算方法、装置及终端设备能够提高四旋翼无人机姿态角解算的准确性。
申请人:河北科技大学
地址:050000 河北省石家庄市裕翔街26号
国籍:CN
代理机构:石家庄国为知识产权事务所
代理人:秦敏华
更多信息请下载全文后查看。
義撮■集■錐键测控技术2018年第37卷第6期• 81 •基于自适应互补滤波的四旋翼飞行器姿态解算陈华胄,谌海云(西南石油大学电气信息学院,四川成都610500)摘要:在四旋翼无人机中,姿态传感器采用捷联式惯导惯性检测单元(IM U),其中包括加速度计、陀螺 仪、电子罗盘和空气压力高度计。
这些传感器在工作过程中存在温度漂移以及噪声干扰,为了得到准确 的姿态数据,首先建立了传感器四元数模型,在频域中设计互补滤波器,并设计了P I自适应补偿系数,对传感器数据进行融合、补偿和修正,有效地避免了系统模型误差对姿态估计的影响。
修正后的角速度 通过一阶龙格-库塔法、四元数算法完成飞行器的姿态解算。
传统互补滤波器在噪声大时滤波效果不 理想,故加入P I控制,形成一种效果更好的自适应滤波算法,根据仿真结果,该算法滤波后的信号比传 统互补滤波的结果更加平滑,更接近理想波形。
关键词:四旋翼飞行器;互补滤波;姿态解算;四元数中图分类号:TP13 文献标识码:A 文章编号:1000 -8829(2018)06-0081-04d o i:10.19708/j. ck js. 2018.06.018Attitude Algorithm of Quadrotor Based on Adaptive Complementary FilteringC H E N H ua-zh ou, C H E N H ai-yu n(School o f E le c tric a l and In fo rm a tio n, Southwest Petroleum U n ive rsity, Chengdu 610500, China)Abstract:The strapdown inertial navigation inertial m easurem ent unit (IM U) is u sed as attitude sensor in quadrotor, which in cludes accelerom eter, gyroscope, electronic com pass and barom eter. T hese sensors have temperature drift and noise disturbance during operation. In order to obtain accurate attitude data, a quaternion m odel of the sensor w as establish ed firstly, and a com plem entary filter and PI adaptive com pensation factors were designed in frequency dom ain, and the sen so rs’ data were coalesced, com pensated and corrected, which effectively avoid the im pacts of system model error on attitude estim ating. The corrected angular velocity was used to achieve the attitude calculation of the aircraft through the R unge-K utta method and the quaternion algorithm. The traditional complementary filters are not ideal for filtering when the noise is strong, a more effective adaptive filtering algorithm is designed when adding the PI control. According to the sim ulation result, the filtered signal of the algorithm is smoother than the traditional complementary filtering signal and is closer to the ideal waveform. Key words:quadrotor; com plem entary filtering; attitude algorithm; quaternion四旋翼飞行器的姿态通过以下物理量来描述:翻 滚角(P)、俯仰角(的、偏航角(^ )和高度U)。
四旋翼飞行器姿态解算算法试验研究卢艳军; 陈雨荻; 李元龙【期刊名称】《《电光与控制》》【年(卷),期】2019(026)011【总页数】6页(P45-50)【关键词】四旋翼飞行器; 梯度下降与互补滤波融合算法; 自适应互补滤波【作者】卢艳军; 陈雨荻; 李元龙【作者单位】沈阳航空航天大学沈阳110136【正文语种】中文【中图分类】V249.10 引言四旋翼飞行器由于结构简单、成本低廉且具有垂直升降和悬停等机动优势,广泛应用于军事和民用领域。
在四旋翼飞行器的飞行控制系统中,姿态信息的实时获取和精确解算尤为关键[1],目前常见的姿态解算有梯度下降算法[2]、互补滤波算法[3]和卡尔曼滤波算法[4-5]等,不同算法在不同情况下的解算效果不同。
本文针对自适应互补滤波算法和梯度下降与互补滤波融合算法,基于自主研发的IMU系统平台,分别进行静态和动态两种情况下的解算效果测试与对比分析。
1 四元数法的姿态解算1.1 姿态坐标系根据捷联惯性导航原理建立两个基本坐标系,机体坐标b系与导航坐标n系,如图1所示。
图1 导航坐标系与机体坐标系Fig.1 Navigation coordinate system and body coordinate system飞行器的姿态角是机体坐标b系相对于导航坐标n系的方向关系。
OXnYnZn为导航坐标系,Xn,Yn和Zn轴分别指向东、北和天向;机体坐标系为OXbYbZb,Xb轴沿机体横轴指向右,Yb轴沿机体纵轴指向前,Zb轴垂直指向机体上方,构成右手坐标系。
旋转矩阵按照Z-X-Y的转动顺序,得到由导航坐标系转到机体坐标系的变换矩阵为[6](1)式中:φ表示滚转角;ψ表示偏航角;θ表示方位角。
1.2 四元数基本概念四旋翼飞行器在飞行中的姿态角通过机体坐标系与导航坐标系的转换来获得。
四元数的姿态旋转表示方法在实际运用过程中避免了欧拉角万向节死锁问题,所以采用四元数方法表示姿态角,既能实现准确快速地跟踪姿态角变化,又能减小解算过程中的计算量,保证了姿态解算算法的髙效率和高精度。
基于非线性互补滤波算法的四旋翼飞行器姿态信息融合处理孙菁宇;高国伟;潘宏生;毛瑞燕【摘要】针对四旋翼飞行器的MEMS惯性测量单元在姿态测量过程中存在着漂移和噪声误差等问题,在经典互补滤波融合算法的基础上提出了一种改进型的姿态融合处理算法,并搭建了以MPU6050为姿态测量单元的四旋翼飞行器硬件测试平台,分别在静态和动态环境下对惯性测量单元直接解算得到的姿态数据、传统互补滤波融合得到的姿态数据及改进后滤波算法融合得到的姿态信息进行对比.结果表明,改进后的姿态融合算法在静态环境和动态环境下都表现出了优于传统互补滤波的姿态融合处理效果.【期刊名称】《传感器世界》【年(卷),期】2017(023)004【总页数】6页(P14-19)【关键词】四旋翼飞行器;互补滤波;姿态融合【作者】孙菁宇;高国伟;潘宏生;毛瑞燕【作者单位】北京信息科技大学传感器重点实验室,北京100192;北京信息科技大学传感器重点实验室,北京100192;北京国科舰航传感技术有限公司,北京100101;北京信息科技大学传感器重点实验室,北京100192【正文语种】中文【中图分类】V275+.1一、引言近年来,随着新材料、微机电(MEMS)、微惯导(MIMU)以及飞行控制等技术的逐渐成熟及个人航拍和航模运动的兴起,低成本飞行器迅速进入大众视线,无人机市场呈现出爆炸式增长,其中尤以四旋翼飞行器最为主流[1]。
四旋翼在布局形式上属于非共轴式碟形飞行器,四个旋桨按照不同的方向旋转不仅抵消了反扭力矩,并且可以通过调节四个旋翼的转速实现各个方向的飞行控制。
其结构的简单可靠,体积小、重量轻,成本低,机动性强等特点使其在许多领域发挥出越来越不可替代的作用[2-3],因此,研究其基本原理并在现有的功能基础上进行改进和优化具有重要意义。
姿态的准确获取是飞行器实现稳定飞行的前提,而姿态解算的精度和速度将直接影响到飞控算法的稳定性和可靠性。
随着人们对姿态解算的精度要求以及机载硬件的计算效率越来越高,姿态数据融合的精细化仍是当下研究的一个热点。
基于四元数二阶互补滤波的四旋翼姿态解算
基于四元数二阶互补滤波的四旋翼姿态解算
伏家杰,周翟和,尹辉,陈燕
【摘要】姿态解算是四旋翼飞行器的关键技术,其精度直接影响飞行器控制的可靠性和稳定性。
针对当前常用一阶互补滤波算法中阻带衰减速率慢和陀螺仪常值漂移产生的稳态误差问题,通过增加积分环节,设计了一种基于四元数的二阶互补滤波算法,能更好地利用加速度计和磁力计的稳态信息有效补偿陀螺仪常值漂移,从而减少姿态解算的累积误差。
仿真结果表明,该算法具有更好的稳定性,提高了系统的姿态解算精度。
通过飞行器真实飞行数据对算法进行了实验验证,结果显示姿态的俯仰角、横滚角精度<1°,偏航角精度<2°,能很好地满足飞行器控制系统对姿态解算的精度要求。
【期刊名称】机械制造与自动化
【年(卷),期】2019(048)002
【总页数】5
【关键词】姿态估计;四元数;互补滤波;四旋翼飞行器;MEMS IMU
基金项目:国家自然科学基金项目(61174102);江苏省产学研前瞻性联合研究项目(BY2015003-06)
0 引言
四旋翼飞行器姿态解算的精度和速度将直接影响飞行器控制算法的稳定性、可靠性和实现的难易程度。
所以姿态解算是四旋翼飞行器控制实现的前提[1-2]。
随着微机电技术和计算机技术的发展,由于陀螺仪和加速度计组成的低成本惯性测量单元(IMU)具有体积小、重量轻、功耗低、性价比高等特点,在四旋翼飞行器姿态的测量系统得到普遍应用[3-4]。
本文研究的四旋翼飞行器姿态测量。
第 38 卷 第 2 期 2014 年 3 月燕山大学学报 Journal of Yanshan UniversityVol. 38 No. 2 Mar. 2014文章编号:1007-791X (2014) 02-0175-06基于四元数互补滤波的无人机姿态解算吕印新 1,肖前贵 2, *,胡寿松 12. 南京航空航天大学 无人机研究院, (1. 南京航空航天大学 自动化学院, 江苏 南京 210016; 江苏 南京 210016) 摘 要:针对无人机低成本姿态解算这一基本问题,考虑到传统姿态算法运算量大、不易调试,采用微惯性单元 (MEMS) 测量无人机原始姿态数据,采用基于四元数的互补滤波算法,有效降低姿态解算的运算量,实现 MEMS 各传感器的信息融合。
从理论上证明了基于四元数的互补滤波器的稳定性,分析了滤波器的性能。
采用 无人机真实数据验证了算法的有效性,解算得到的俯仰角、滚转角精度小于 1°,航向角精度小于 2°。
与传统姿 态算法比较,本算法简单有效、运算量小、易于调试。
关键词:姿态;四元数;互补滤波 ;稳定性分析 中图分类号:V243.5 文献标识码:A DOI:10.3969/j.issn.1007-791X.2014.02.0150引言微小型无人机具有成本低、隐蔽性好、生存能EKF 算法。
然而 EKF 存在 3 大缺陷:1) 在一般 情况下计算雅可比矩阵是不容易实现的过程, 而且 2) 其计算量很大; 当线性化假设不成立时,线性 化会导致滤波器极度不稳定;3) 实际应用中,噪 声难以符合白噪声的要求 [2-3]。
文献 [4-5] 利用粒 子滤波解决了系统非线性、 非白噪声对姿态解算的 影响,然而此方法计算量较大,不适合低成本航姿 系统的应用。
互补滤波器算法简单可靠,对惯性器 件的精度要求较低, 在飞行器姿态解算中的应用愈 加广泛。
文献 [6-7] 分别给出了欧拉角、方向余弦 矩阵形式下的互补滤波, 然而在飞行器存在运动加 速度的时候,姿态解算的误差较大。
基于四元数互补滤波的无人机姿态解算本文提出了一种基于四元数互补滤波的无人机姿态解算方法。
该方法通过对四元数的互补滤波来对无人机的姿态进行估计,实现了对无人机运动状态的实时监测和控制。
同时,本文还对该方法进行了实验验证,结果表明该方法具有较高的精度和实用性。
关键词:四元数;互补滤波;无人机姿态解算;估计;监测一、引言随着无人机技术的飞速发展,无人机在军事、民用等领域的应用越来越广泛。
然而,无人机的飞行控制与稳定性问题一直是无人机技术的瓶颈之一。
其中,无人机姿态解算技术是实现无人机飞行控制的关键技术之一。
无人机姿态解算指的是通过传感器采集的数据,对无人机的姿态进行估计和推算,以实现对无人机运动状态的实时监测和控制。
传统的无人机姿态解算方法主要基于欧拉角和旋转矩阵等数学模型,但这些方法存在着欧拉角奇异性和旋转矩阵计算复杂等问题,导致无法满足实际应用需求。
因此,近年来,越来越多的研究者开始探索基于四元数的无人机姿态解算方法。
四元数是一种具有四个实数分量的数学对象,可以用来表示旋转、姿态等信息。
相比于欧拉角和旋转矩阵等传统数学模型,四元数具有计算简单、不存在奇异性等优点,因此在无人机姿态解算领域得到了广泛应用。
而互补滤波是一种常用的信号处理方法,可以对多个信号进行加权平均,从而得到更加准确的结果。
因此,本文提出了一种基于四元数互补滤波的无人机姿态解算方法,以解决传统方法存在的问题。
二、基于四元数互补滤波的无人机姿态解算方法1.四元数表示姿态四元数可以用来表示旋转、姿态等信息,其具有简单的计算方式和不存在奇异性等优点。
因此,本文采用四元数来表示无人机的姿态信息。
四元数可以表示为:q = a + bi + cj + dk其中,a、b、c、d为实数分量,i、j、k为三个虚数分量,满足: i = j = k = ijk = -1四元数可以表示旋转、姿态等信息,其中,a为实部,b、c、d为虚部,表示旋转轴和旋转角度。
基于扩展卡尔曼滤波的四旋翼无人机姿态估计方法作者:段敏赵凌周莹来源:《现代信息科技》2022年第04期摘要:為提高四旋翼无人机姿态参数获取的准确性,确保后续姿态控制精度,采用STM32F407微控制器以及多传感器构成姿态测量系统。
对各传感器原始误差进行校准,应用扩展卡尔曼滤波(EKF)进行基于陀螺仪的状态预测和基于加速度计/磁力计的测量校正,融合信息并估计出3姿态角,与3自由度姿态算法验证系统测量出的姿态角真实值对比,3个角度的平均误差为0.7°,相对于基于单一陀螺仪积分和基于加速度计/磁力计的姿态解算,误差分别下降了3.034°和0.174°,该方法可有效提高EKF估计精度。
关键词:扩展卡尔曼滤波;四旋翼无人机;姿态估计中图分类号:TP368;V279 文献标识码:A文章编号:2096-4706(2022)04-0007-05Attitude Estimation Method for Quad-rotor UAV Based on Extended Kalman FilterDUAN Min, ZHAO Ling, ZHOU Ying(The College of Post and Telecommunication of WIT, Wuhan 430073, China)Abstract: In order to improve the accuracy of attitude parameters acquisition of quad-rotor UAV and ensure the subsequent attitude control accuracy, STM32F407 microcontroller and multi-sensor are used to form an attitude measurement system. The original error of each sensor is calibrated. The extended Kalman filter (EKF) is used for gyro-based state prediction andaccelerometer/magnetometer-based measurement correction. The information is fused and the three attitude angles are estimated. Compared with the real value of the attitude angle measured by the 3-DOF attitude algorithm verification system, the average error of the three angles is 0.7°, compared with the attitude solution based on single gyro integral and the attitude solution based on accelerometer/magnetometer, the errors are reduced by 3.034° and 0.174° respectively. This method can effectively improve the accuracy of EKF estimation.Keywords: extended Kalman filter; quad-rotor UAV; attitude estimation0 引言四旋翼无人机因其成本低廉、维护操作简单、可替代人力完成特殊任务等优点,近年来被广泛应用于军用和民用领域[1,2]。
基于互补滤波算法的四轴飞行控制系统设计向少林;钱正洪;白茹;朱礼尧【期刊名称】《机电工程》【年(卷),期】2016(033)002【摘要】针对目前大多数飞行控制系统姿态信息获取不全、数据融合算法复杂等问题,对四轴飞行器的姿态数据采集、传感器数据特性、数据融合、飞行控制模型等方面进行了研究,对四轴飞行器的多传感器数据融合的特点进行了归纳,详细介绍了互补滤波算法的实现过程,设计了一种基于互补滤波融合算法的四轴飞行控制系统.采用了陀螺仪、加速度计和电子罗盘作为传感器组,将其用于多种姿态信息的获取,通过使用经典的PID控制器实现了飞行器的控制算法,在STM32平台上完成了飞行控制系统的软、硬件设计.最终,在制作完成的硬件上,对数据融合算法的效果进行了比较和分析.研究结果表明,该设计能够高效地融合MEMS与GMR传感器的数据,解算出的姿态角可靠性高,可以满足四轴飞行器的飞行控制要求.【总页数】6页(P207-211,246)【作者】向少林;钱正洪;白茹;朱礼尧【作者单位】杭州电子科技大学磁电子中心,浙江杭州310018;杭州电子科技大学磁电子中心,浙江杭州310018;杭州电子科技大学磁电子中心,浙江杭州310018;杭州电子科技大学磁电子中心,浙江杭州310018【正文语种】中文【中图分类】TP23;TH39【相关文献】1.基于FPGA的四轴飞行器飞行控制系统设计 [J], 徐亚妮;罗文广;张亮2.基于Arduino平台的微小型四轴飞行器设计r与飞行控制系统实现 [J], 张崇晖;黄建龙3.基于FPGA的四轴飞行器飞行控制系统设计 [J], 徐亚妮;罗文广;张亮;4.基于MSP430单片机的四轴飞行器飞行控制系统设计 [J], 李想; 亢洁5.基于互补滤波算法有缆六旋翼飞行器设计 [J], 赵文龙[1];方立东[1]因版权原因,仅展示原文概要,查看原文内容请购买。
基于自适应互补滤波的四旋翼飞行器姿态解算
四旋翼飞行器是目前使用最广泛的无人机形式之一,其姿态解算是保证其正确飞行方向的关键。
最常用的四旋翼飞行器姿态解算算法是基于由加速度计和陀螺仪融合而得到的无源信标。
但是,在具有振荡和噪声特性的复杂环境中,该方法的稳定性受到严重影响。
为了改进这一情况,研究者引入了基于自适应互补滤波(ACF)的姿态解算算法。
该方法利用自适应互补滤波(ACF)的优点来解决采用无源信标方法时噪声强度大的问题,并利用融合传感器的信息估计姿态。
在ACF中,传感器信号被分解为两种截然不同的类型:模型类型和测量类型,这使模型和传感器测量可以融合到姿态修正函数中。
通过将传感器内置偏置项作为输入,ACF可以不断修正姿态解算结果,从而达到自适应调整的效果。
另外,ACF也使用坐标轴重心更新算法来进一步改善姿态张量的精度。
在重心更新算法中,将传感器数据的贡献度换算为与中心点的距离,以便计算它们的综合表达式。
与参数化过程相关联的可调参数如四元数、重心权重和本征矩阵可以调整姿态精度,最终提高传感器系统的鲁棒性。
总之,基于自适应互补滤波的四旋翼飞行器姿态解算方法使用融合传感器信息、自适应调整以及重心更新算法,来克服由于复杂环境振荡和噪声对姿态解算稳定性的影响。
同时,采用可调参数进一步提高了姿态解算的精度,从而提高了四旋翼飞行器的飞行精度和安全性。