基于ZigBee的无线定位系统设计
- 格式:pdf
- 大小:1.48 MB
- 文档页数:4
[摘要]随着无线通信技术的快速发展,人们对于现代煤矿的生产要求也是越来越高,对此,就提出了一种基于ZigBee的短距离无线通信技术,并且将这种技术应用于矿井人员管理的系统。
ZigBee技术具有低功耗的特点,将这种技术应用在煤矿井下的无线传输系统中,利用光纤网络来是你先对数据的双向通信,还可以利用互联网来实现资源的共享。
有这种系统所组成的井下无线传感器网络能够实现对井下工作人员的定位跟踪管理,更为煤矿井下的安全生产提供了技术支持。
[关键词]ZigBee无线网络;人员管理;单片机;环网冗余基于ZigBee技术的煤矿井下作业人员定位管理系统的设计倪飞刘亚磊洪先锋(河南神火集团刘河煤矿,河南永城476600)科学技术的不断发展致使人们对矿业的安全身安全生产有了更高的要求。
所以,开发出一种新型的矿井人员管理系统,从而实现对井下工作人员的实时跟踪,这样地面管理人员对于井下的工作人员就不存在视觉的盲区,对矿井的灾害意识也能够进一步加强,井下一旦发生安全事故,也能够快速的作出反应,做好应急准备。
对于国内研究者所提出的在矿井人员管理系统的基础上所设计的基于ZigBee技术的矿井人员管理系统已经能够在日常生产中使用,这种系统是采用了国际上比较先进的ZigBee射频技术,能够对井下的各种存在的信息进行无线传输,利用光纤环网冗余技术,将矿井下的每个区域工作人员的动态及时准确的反映给地面的计算机,让煤矿管理人员能够对随时对井下作业人员的动态进行了解。
若是有事故发生,那么就乐意立即从监测计算机中查询到具体事故发生的位置以及被困人员的数量以及位置分布情况,为救援工作提供了良好的科学依据,节省了搜索的时间,救援工作开展的更加顺利。
一、ZigBee 技术及光纤环网冗余技术简介(一)ZigBee技术ZigBee技术是一种双向无线网络通信技术,具有结构简单、近距离、低功耗、低速率、低成本、高可靠性的优点,被称为IEEE802.15.4(ZigBee)技术标准。

基于ZigBee旅游景区内游客定位系统的研究作者:凯刘纯天来源:《信息安全与技术》2012年第12期【摘要】针对旅游景区内游客自由参观时迷路而找不到旅游团、导游召集游客难等一系列问题,文章以CC2430/CC2431 芯片为系统核心模块,设计了一种基于ZigBee技术的旅游景区内游客定位系统。
该系统是对无线传感网络应用的一次探索,对于无线传感网络在一维定位上面的应用已经有相关实例了,例如矿井内工人的定位。
系统采用ZigBee技术组建无线传感网络,结合RSSI定位算法实现了对景区内游客的二维定位,较一维定位效果更好。
【关键词】景区;ZigBee;无线传感网络;定位算法The Research about the Locating System of Visitors in Tourist Scenic spot Based on ZigBeeLei Kai Liu Chun-tian(Wuhan Textile University HubeiWuhan 430200)【 Abstract 】 Due to a series of problems such as visitors in Tourist scenic spot are hard to find the tour and the guide is hard to called visitors, the article uses CC2430/CC2431 chips for the System core modules to designs a the locating system of visitors in Tourist scenic spot Based on ZigBee, this system is a exploration of Wireless sensor network applications, there are some examples of One-dimensional positioning in Wireless sensor network applications, such as locating system for mining personnel. The system uses ZigBee technology to build Wireless sensor network,Combined with localization algorithm based on RSSI to make the Two-dimensional localization of visitors come ture, and much better than One-dimensional localization.【 Keywords 】 tourist scenic spot; zigbee; wireless sensor network; localization algorithm0 引言随着人们生活水平的提高,当下旅游业迅猛发展,同时也暴露出许多需要解决的问题,例如在游玩过程中,往往会遇到找游客难的问题,这时如果导游能清楚地知道游客的地理位置,那么就很容易找到游客。
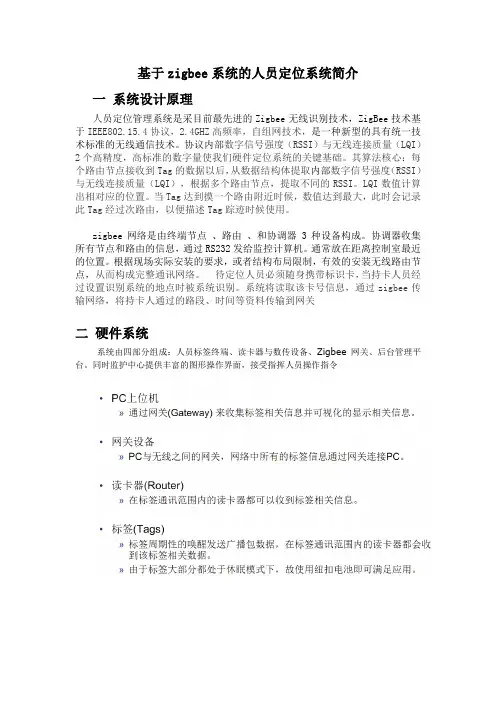
基于zigbee系统的人员定位系统简介一系统设计原理人员定位管理系统是采目前最先进的Zigbee无线识别技术,ZigBee技术基于IEEE802.15.4协议,2.4GHZ高频率,自组网技术,是一种新型的具有统一技术标准的无线通信技术。
协议内部数字信号强度(RSSI)与无线连接质量(LQI)2个高精度,高标准的数字量使我们硬件定位系统的关键基础。
其算法核心:每个路由节点接收到Tag的数据以后,从数据结构体提取内部数字信号强度(RSSI)与无线连接质量(LQI),根据多个路由节点,提取不同的RSSI。
LQI数值计算出相对应的位置。
当Tag达到摸一个路由附近时候,数值达到最大,此时会记录此Tag经过次路由,以便描述Tag踪迹时候使用。
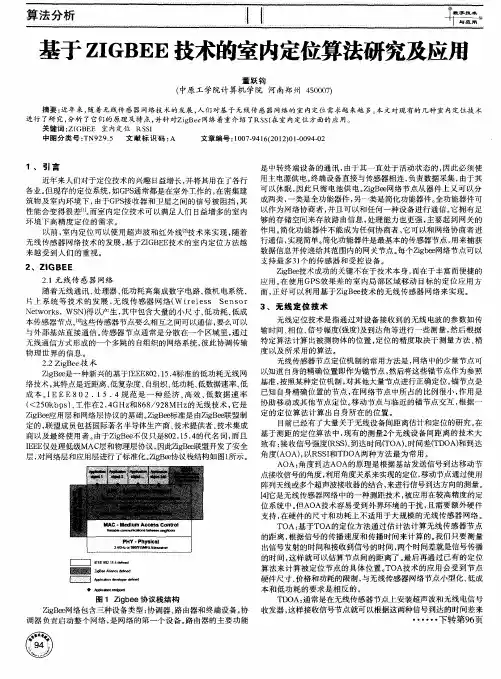
zigbee网络是由终端节点、路由、和协调器 3种设备构成。
协调器收集所有节点和路由的信息,通过RS232发给监控计算机。
通常放在距离控制室最近的位置。
根据现场实际安装的要求,或者结构布局限制,有效的安装无线路由节点,从而构成完整通讯网络。
待定位人员必须随身携带标识卡,当持卡人员经过设置识别系统的地点时被系统识别。
系统将读取该卡号信息,通过zigbee传输网络,将持卡人通过的路段、时间等资料传输到网关二硬件系统系统由四部分组成:人员标签终端、读卡器与数传设备、Zigbee网关、后台管理平台。
同时监护中心提供丰富的图形操作界面,接受指挥人员操作指令1,服务器部分可以是PC或专用服务器,提供RS232串口或以太网接口。
接收TAG数据后,通过一定算法来处理TAG数据并结合地图来展示人员位置与相关紧急报警信息。
2网关:服务器和Zigbee网络之间的桥接设备,网络中所有的标签信息最终汇聚到网关,再传输至服务器。
根据应用需求,网关可以使用RS232接口、RJ45接口、无线WiFi、GPRS等接口和技术和服务器连接3 Reader读卡器与路由节点:负责读取TAG相关信息并利用Zigbee网络远传数据到网关,在标签通讯范围内的读卡器都会收到TAG标签数据。
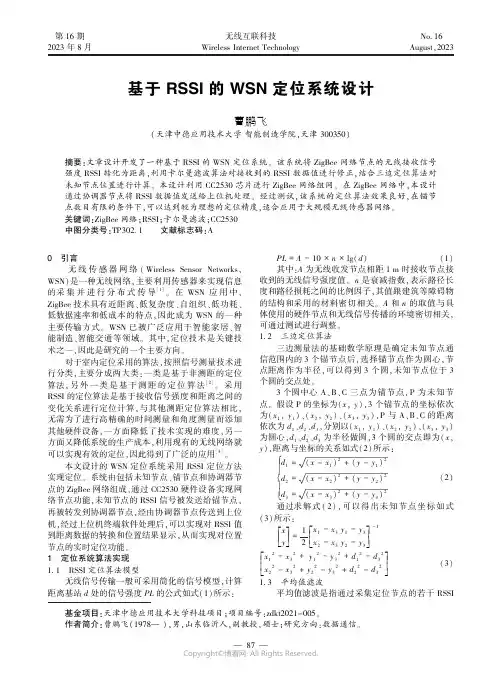
第16期2023年8月无线互联科技Wireless Internet TechnologyNo.16August,2023基金项目:天津中德应用技术大学科技项目;项目编号:zdkt2021-005㊂作者简介:曹鹏飞(1978 ),男,山东临沂人,副教授,硕士;研究方向:数据通信㊂基于RSSI 的WSN 定位系统设计曹鹏飞(天津中德应用技术大学智能制造学院,天津300350)摘要:文章设计开发了一种基于RSSI 的WSN 定位系统㊂该系统将ZigBee 网络节点的无线接收信号强度RSSI 转化为距离,利用卡尔曼滤波算法对接收到的RSSI 数据值进行修正,结合三边定位算法对未知节点位置进行计算㊂本设计利用CC2530芯片进行ZigBee 网络组网㊂在ZigBee 网络中,本设计通过协调器节点将RSSI 数据值发送给上位机处理㊂经过测试,该系统的定位算法效果良好,在锚节点数目有限的条件下,可以达到较为理想的定位精度,适合应用于大规模无线传感器网络㊂关键词:ZigBee 网络;RSSI ;卡尔曼滤波;CC2530中图分类号:TP302.1㊀㊀文献标志码:A0㊀引言㊀㊀无线传感器网络(Wireless Sensor Networks,WSN)是一种无线网络,主要利用传感器来实现信息的采集并进行分布式传导[1]㊂在WSN 应用中,ZigBee 技术具有近距离㊁低复杂度㊁自组织㊁低功耗㊁低数据速率和低成本的特点,因此成为WSN 的一种主要传输方式㊂WSN 已被广泛应用于智能家居㊁智能制造㊁智能交通等领域㊂其中,定位技术是关键技术之一,因此是研究的一个主要方向㊂对于室内定位采用的算法,按照信号测量技术进行分类,主要分成两大类:一类是基于非测距的定位算法,另外一类是基于测距的定位算法[2]㊂采用RSSI 的定位算法是基于接收信号强度和距离之间的变化关系进行定位计算,与其他测距定位算法相比,无需为了进行高精确的时间测量和角度测量而添加其他硬件设备,一方面降低了技术实现的难度,另一方面又降低系统的生产成本,利用现有的无线网络就可以实现有效的定位,因此得到了广泛的应用[3]㊂本文设计的WSN 定位系统采用RSSI 定位方法实现定位㊂系统由包括未知节点㊁锚节点和协调器节点的ZigBee 网络组成,通过CC2530硬件设备实现网络节点功能,未知节点的RSSI 信号被发送给锚节点,再被转发到协调器节点,经由协调器节点传送到上位机,经过上位机终端软件处理后,可以实现对RSSI 值到距离数据的转换和位置结果显示,从而实现对位置节点的实时定位功能㊂1㊀定位系统算法实现1.1㊀RSSI 定位算法模型㊀㊀无线信号传输一般可采用简化的信号模型,计算距离基站d 处的信号强度PL 的公式如式(1)所示:PL =A -10ˑn ˑlg(d )(1)其中:A 为无线收发节点相距1m 时接收节点接收到的无线信号强度值㊂n 是衰减指数,表示路径长度和路径损耗之间的比例因子,其值跟建筑等障碍物的结构和采用的材料密切相关㊂A 和n 的取值与具体使用的硬件节点和无线信号传播的环境密切相关,可通过测试进行调整㊂1.2㊀三边定位算法㊀㊀三边测量法的基础数学原理是确定未知节点通信范围内的3个锚节点后,选择锚节点作为圆心,节点距离作为半径,可以得到3个圆,未知节点位于3个圆的交点处㊂3个圆中心A㊁B㊁C 三点为锚节点,P 为未知节点㊂假设P 的坐标为(x ,y ),3个锚节点的坐标依次为(x 1,y 1)㊁(x 2,y 2)㊁(x 3,y 3),P 与A㊁B㊁C 的距离依次为d 1㊁d 2㊁d 3,分别以(x 1,y 1)㊁(x 2,y 2)㊁(x 3,y 3)为圆心,d 1㊁d 2㊁d 3为半径做圆,3个圆的交点即为(x ,y ),距离与坐标的关系如式(2)所示:d 1=(x -x 1)2+(y -y 1)2d 2=(x -x 2)2+(y -y 2)2d 3=(x -x 3)2+(y -y 3)2ìîíïïïï(2)通过求解式(2),可以得出未知节点坐标如式(3)所示:x y éëêêùûúú=12x 1-x 3y 1-y 3x 2-x 3y 2-y 3éëêêùûúú-1x 12-x 32+y 12-y 32+d 12-d 32x 22-x 32+y 22-y 32+d 22-d 32éëêêùûúú(3)1.3㊀平均值滤波㊀㊀平均值滤波是指通过采集定位节点的若干RSSI值,然后取这些数据的算术平均值㊂通常在实际测量时,一组数据需要测量足够多的RSSI值,由于环境的复杂性和无线信号的不稳定性,这些RSSI值变化较大,缺乏一致性,任选其中一个数据都不能准确表示RSSI值,因此可以选择平均值滤波的方法来获得较为合理的RSSI值㊂平均值滤波公式如式(4)所示㊂ðPL=1mðm i=1PL i(4)其中,PL表示RSSI值,m表示测量的个数㊂当m取值较小时,采集到的数据实时性和准确性较差㊂当m取值较大时,虽然可以减少数据的偶然性,但是需要测量更多的数据,又会增加通信的成本,并且在处理大扰动时效果不够理想㊂因此,从提高实验准确性和降低通信成本等因素考虑,需要选取一个较为合适的m值㊂1.4㊀卡尔曼滤波㊀㊀卡尔曼滤波(Kalman Filtering,KF)算法是依据线性系统状态方程,利用系统输入输出数据,对系统状态实现最优估计㊂最初目的是用于估计随机过程的参数,随后基于其自身特点被广泛应用于解决各种最优滤波和最优控制等问题[4]㊂一般来说,卡尔曼滤波算法包括2个基本特点:(1)卡尔曼滤波器是自适应滤波器,其解是一种递推计算;(2)卡尔曼滤波的数学公式通过状态空间的概念进行描述㊂受噪声的影响,系统状态作为一个随机量,难以得到精确的数值,卡尔曼滤波依据某种统计模式,将对系统进行多次观测后得到的数据进一步处理后实现对实时系统状态的估计和预测㊂在卡尔曼滤波中,状态方程表示如式(5)所示:x(k)=Φx(k-1)+ω(k-1)(5)测量方程表示如式(6)所示:y(k)=Hx(k)+v(k)(6)式中:x(k)表示状态值,y(k)表示测量值,Φ为状态转移矩阵,H为系统测量矩阵,ω(k)为输入白噪声,v(k)为观测噪声㊂卡尔曼滤波过程包括预测过程和修正过程,在滤波过程中,修正状态估计值是滤波后的RSSI值,测量值是实验测得的RSSI值[5]㊂主要计算公式如下:预测状态估计值如式(7)所示:X(k+1|k)=ΦX(k|k)(7)一步预测协方差矩阵如式(8)所示:P(k+1|k)=ΦP(k|k)ΦT+ΓQΓT(8)求滤波增益矩阵如式(9)所示:K(k+1)=P(k+1|k)H T[HP(k+1|k)H T+ R]-1(9)状态更新如式(10)所示:X(k+1|k+1)=X(k+1|k)+K(k+1)ε(k+ 1)ε(k+1)=Y(k+1)-HX(k+1|k)(10)协方差更新如式(11)所示:P(k+1|k+1)=[I n-K(k+1)H]P(k+1|k) X(0|0)=μ0P(0|0)=P0(11)其中,X(k+1 k)是利用上一状态预测下一时刻的结果;X(k k)是已知测量值y(k)时,k时刻的修正状态估计值;Γ为系统噪声驱动矩阵;R为系统观测噪声方差阵;Q为系统过程方差阵㊂2 定位系统硬件实现㊀㊀系统硬件组成如图1所示㊂图1㊀系统硬件组成在本定位系统中,首先需要选择合适的ZigBee 网络处理芯片㊂根据综合性能的比较,选择TI公司的CC2530芯片㊂该芯片结合一个高性能的RF收发器与一个8051微处理器,包含8kB的RAM以及最大256kB闪存㊂此外,这款芯片集合了ZigBee协议栈(Z-Stack),极大方便了用户的开发㊂ZigBee网络由锚节点㊁未知节点和协调器节点组成,不同节点采用的处理器都为CC2530芯片,可在软件中设置为不同的功能模块㊂ZigBee网络节点的硬件模块包括核心板模块和底板模块,其中核心板模块由处理器模块㊁射频接口模块㊁时钟电路模块㊁串口通信模块等组成;底板模块由电源模块㊁USB接口模块和传感器接口模块等组成㊂在核心板电路模块中,处理器采用CC2530芯片,主要完成ZigBee协议的处理和采集数据的处理㊂CC2530芯片中集成Z-Stack协议栈,可以提供完整的ZigBee网络协议应用㊂射频接口模块可以外接天线,提高无线信号的可靠性和稳定性㊂时钟电路模块用于提供电路工作时钟㊂串口通信模块用于和外界的串口通信,利用USB转串口电路实现㊂在底板电路模块中,电源模块将外接电源或电池电源通过电压转换芯片产生不同电压值,以便对电路中各模块进行供电㊂USB接口模块既能对电路板进行供电,同时可以完成处理器程序的下载㊂传感器接口模块可用于外部不同类型的传感器㊂ZigBee网络中的协调器节点通过串口将采集到的RSSI数据传递给上位机,同时可将上位机的控制指令下发到ZigBee网络终端节点㊂上位机处理采集到的数据,根据定位算法计算未知节点的位置坐标并将结果进行显示㊂3㊀系统人机交互界面设计㊀㊀上位机是整个定位系统的信息处理中心,能够实现人机交互,显示未知节点的定位信息㊂其通过串口实现上位机和ZigBee网络协调器之间的通信,能够接收ZigBee无线通信系统中未知节点发送的RSSI数据信息,根据锚节点的固定位置信息,并结合上文提到的定位算法进行位置计算㊂上位机软件采用Visual Studio软件实现,结合模块化的思想进行开发,具有易于扩展和易于移植等优点㊂4㊀定位系统测试㊀㊀在本定位系统中,ZigBee网络中的锚节点和未知节点都是终端节点,其中包括1个需要计算坐标信息的未知节点,4个锚节点作为参考节点,此外还有1个协调器节点用来管理ZigBee网络和给上位机上传RSSI数据㊂在实际测试时,设定一个8mˑ8m的固定区域,在此范围内进行未知节点的定位测试,4个锚节点放置于指定位置,未知节点的放置位置不能超出锚节点的有效通信范围㊂系统运行后,移动未知节点的位置,在上位机软件中能够实时显示对应坐标值㊂测试时,每个锚节点读取100次未知节点的RSSI数据值作为一组测试值,通过协调器节点发送给上位机软件进行中值滤波和卡尔曼滤波处理后,再进行定位计算,从而得到未知节点的位置信息㊂当对比实际坐标测量值时,无滤波处理时测量值和实际值偏差较大,而采用滤波算法的定位效果更好,其中采用卡尔曼滤波算法的应用结果优于采用中值滤波算法的应用结果㊂5㊀结语㊀㊀本文设计的基于RSSI的节点定位系统结构简单,组网灵活,操作方便㊂本研究利用ZigBee网络采集未知节点的RSSI值,实现上位机与协调器模块之间的通信,再通过卡尔曼滤波算法对RSSI数据值进行处理,最后采用三边定位算法进行距离计算,得到未知节点的位置信息,通过采用卡尔曼滤波算法进行数据处理能够获得更高的定位精度㊂参考文献[1]田达.基于WSN的煤矿安全监控系统的研究[J].电子技术与软件工程,2020(24):1-2.[2]朱清山,王伟.基于RSSI的指纹地图室内定位算法[J].国外电子测量技术,2020(10):6-9.[3]刘松旭,张大鹏,乌云娜.基于RSSI模型的无线传感器网络定位算法[J].计算机仿真,2022(1): 427-431.[4]冯帆,吴春,陈军慧.结合粒子滤波与卡尔曼滤波的RSSI室内定位算法[J].智能物联技术,2020(5): 24-29.[5]张玮.基于复合滤波的RSSI无线网络测距算法[J].自动化技术与应用,2021(2):74-76.(编辑㊀王永超)Design of WSN location system based on RSSICao PengfeiCollege of Intelligent Manufacturing Tianjin Sino-German University of Applied Sciences Tianjin300350 ChinaAbstract This paper designs and develops a WSN positioning system based on RSSI.The system converts the wireless received signal strength RSSI of ZigBee network nodes into distance uses Kalman filtering algorithm to correct the received RSSI data value and calculates the unknown node position using a trilateral positioning algorithm.Utilize CC2530chip for ZigBee network networking.In the ZigBee network RSSI data values are sent to the upper computer for processing through the coordinator node.After testing the positioning algorithm of this system works well.Under the condition of limited number of anchor nodes it can achieve ideal positioning accuracy and is suitable for large-scale wireless sensor networks.Key words ZigBee network RSSI Kalman filtering CC2530。
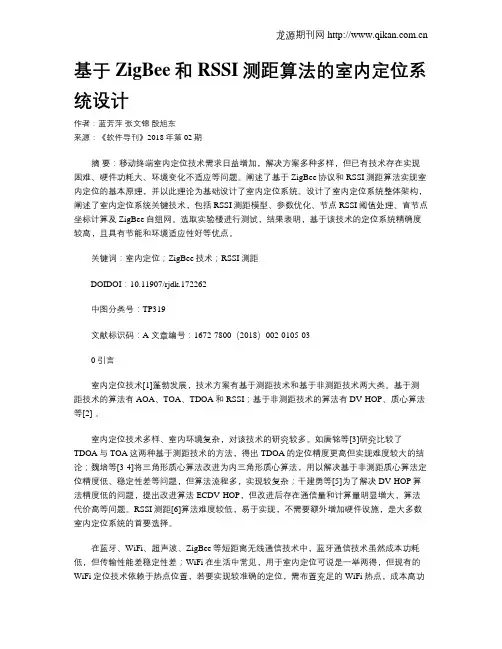
基于ZigBee和RSSI测距算法的室内定位系统设计作者:蓝芳萍张文锦殷旭东来源:《软件导刊》2018年第02期摘要:移动终端室内定位技术需求日益增加,解决方案多种多样,但已有技术存在实现困难、硬件功耗大、环境变化不适应等问题。
阐述了基于ZigBee协议和RSSI测距算法实现室内定位的基本原理,并以此理论为基础设计了室内定位系统。
设计了室内定位系统整体架构,阐述了室内定位系统关键技术,包括RSSI测距模型、参数优化、节点RSSI阈值处理、盲节点坐标计算及ZigBee自组网。
选取实验楼进行测试,结果表明,基于该技术的定位系统精确度较高,且具有节能和环境适应性好等优点。
关键词:室内定位;ZigBee技术;RSSI测距DOIDOI:10.11907/rjdk.172262中图分类号:TP319文献标识码:A 文章编号:1672-7800(2018)002-0105-030 引言室内定位技术[1]蓬勃发展,技术方案有基于测距技术和基于非测距技术两大类。
基于测距技术的算法有AOA、TOA、TDOA和RSSI;基于非测距技术的算法有DV-HOP、质心算法等[2] 。
室内定位技术多样、室内环境复杂,对该技术的研究较多。
如唐铭等[3]研究比较了TDOA与TOA这两种基于测距技术的方法,得出TDOA的定位精度更高但实现难度较大的结论;魏培等[3-4]将三角形质心算法改进为内三角形质心算法,用以解决基于非测距质心算法定位精度低、稳定性差等问题,但算法流程多,实现较复杂;干建勇等[5]为了解决DV-HOP算法精度低的问题,提出改进算法ECDV-HOP,但改进后存在通信量和计算量明显增大,算法代价高等问题。
RSSI测距[6]算法难度较低,易于实现,不需要额外增加硬件设施,是大多数室内定位系统的首要选择。
在蓝牙、WiFi、超声波、ZigBee等短距离无线通信技术中,蓝牙通信技术虽然成本功耗低,但传输性能差稳定性差;WiFi在生活中常见,用于室内定位可说是一举两得,但现有的WiFi定位技术依赖于热点位置,若要实现较准确的定位,需布置充足的WiFi热点,成本高功耗大;超声波技术用于室内定位准确度高,但易受障碍物影响且设备成本高。
基于物联网的无线实时定位系统的设计与实现杜远坤;王磊【摘要】为了达到解决无线实时定位的研究目的,引入ZigBee和CC2530芯片技术,利用RSSI测距研究方法分析了接收信号强度与信号传输距离的关系,并结合三边定位算法,在上位机定位软件上进行仿真实验,通过设置参考节点坐标,可在调试信息框中得到移动节点的测距、定位等过程性实验结果。
通过多次仿真实验模拟,得到了该方法能通过追踪移动节点坐标,较为有效地实现参考节点与移动节点之间的信号强度测量与实时定位等结论。
该文创新点是系统运用先进的微功耗技术与RSSI测距技术,内嵌集成独有的实时定位算法,采用高增益、抗干扰射频电路设计而成,可连续上电运行,能较好地满足室内环境实时定位的功能要求。
%To achieve the purpose of wireless real⁃time positioning,ZigBee and CC2530 technologies are introduced in the system design. the relation between received signal strength and signal transmission distance is analyzed by using the RSSI range finding technology. With the help of trilateral positioning algorithm,the simulation experiments were carried out on positioning software in upper computer. By setting reference node coordinate,some experimental results,such as the mobile n ode′s range finding and positioning,can be obtained in debugging information box. After some experiments,the conclusion that this method can effectively realize the signal strength detection and real⁃time positioning between reference node and mobile node was ob⁃tained by tracing the mobile node coordinate. The innovation point of this paper is that this system can power⁃on operation con⁃tinuously and satisfy the functional requirementsof real⁃time location in indoor environment by utilizing the advanced micro⁃pow⁃er consumption technology and RSSI range finding technology,real⁃time positioning algorithm particular in embedded integra⁃tion,high gain and anti⁃interference radio⁃frequency circuit design.【期刊名称】《现代电子技术》【年(卷),期】2016(039)024【总页数】5页(P79-82,87)【关键词】ZigBee;CC2530;RSSI;三边定位算法【作者】杜远坤;王磊【作者单位】郑州科技学院信息工程学院,河南郑州 450064;郑州科技学院基础部,河南郑州 450064【正文语种】中文【中图分类】TN915-34随着无线传感器网络技术和移动通信技术的发展,区域监控和人员跟踪定位等无线传感器领域的应用,室内环境下的人员跟踪定位成为一个非常热门的研究领域。
参考文献:[1] KARIM Y.构建嵌入式Linux系统[M].北京:中国电力出版社,2004.[2] N EIL M,RICHARD S.Linux程序设计[M].北京:机械工业出版社,2002.[3] 何 梅.J ava Applet编程实例[M].北京:清华大学出版社,2003. 第2期 2008年4月工矿自动化 Industry and Mine Automation No.2 Apr.2008 文章编号:1671-251X(2008)02-0048-03基于ZigBee技术的矿井人员定位系统的设计3张长森, 董鹏永, 徐景涛(河南理工大学计算机科学与技术学院,河南焦作 454003) 摘要:针对ZigBee技术的特点和优势,结合煤矿井下的生产特点,文章提出了一种基于ZigBee技术的矿井人员定位系统的设计方案,介绍了ZigBee设备在煤矿井下的无线通信组网方式,详细阐述了ZigBee通信协议包在ZigBee RFD节点模块和ZigBee FFD节点模块之间的无线数据传输方式,并给出了井下人员定位原理及其具体的实现过程,以及管理软件系统结构框图。
关键词:矿井;人员定位;ZigBee;FFD;RFD 中图分类号:T D76;TN925 文献标识码:BDesign of Personnel Po sition System of Mine Based on ZigBee TechnologyZHAN G Chang2sen, DON G Peng2yong, XU Jing2tao(College of Comp uter Science and Technology of Henan Polytechnic U niversity,Jiaozuo454003,China) Abstract:Aiming at t he feat ures and advantages of ZigBee technology,combining wit h t he production feat ures of coal mine underground,t he paper presented a design scheme of personnel position system of mine based on ZigBee technology,int roduced wireless communication networking mode of ZigBee device in coal mine underground.It expounded wireless t ransmitting mode of data of ZigBee communication protocol bag between ZigBee RFD node module and ZigBee FFD node module,and gave p rinciple of personnel po sition of coal mine underground and it s realizing p rocess,and st ruct ure diagram of management software system.K ey w ords:mine,personnel position,ZigBee,FFD,RFD0 引言在煤矿安全生产中,尤其是在事故发生后,准确判定井下工作人员的分布情况,并进行精确的人员定位,对矿井工作人员的人身安全具有重要的意义。
基于ZigBee的无线定位系统设计The Design of Wireless Location System Based on ZigBee Technologydetection of the nodes' position.Key words:LabVIEW ZigBee CC2430/CC2431 Wireless location Serial data analysis 1 引言随着通信技术的发展,无线通信网络得到越来越广泛的关注。
其中,基于I EEE 802.15.4的Zig Bee技术具有功耗低、可靠性高、时延短、网络容量大、安全性等特点。
以CC2430/CC2431芯片为核心的无线定位系统以其低成本、高分辨率(0.25m)和非常高的定位精度(小于3m)广泛的应用于矿井定位、无线跟踪等领域。
2 ZigBee无线定位单片机CC2430/CC2431Z i g B e e是一种新兴的短距离、低速率无线网络技术,是一种介于无限标记和蓝牙之间的技术提案。
Zig Bee的基础是I EEE 802.15.4,这是IEEE无线个人区域网(Personal Area Network, PAN)工作组的一项标准,被称作I EEE 802.15.4(ZigBee)技术标准。
CC2430/CC2431产品家族是世界上首个真正的单芯片ZigBee解决方案,是第一个真正意义上的SoC ZigBee一站式产品,并有芯片可编程闪存以及通过认证的ZigBee TM协议栈,所有都集中在一个硅片内。
CC2430/CC2431仅需采用较少的外围电路即可组成无线高频模块,实现信号的收发功能。
C C2430和C C2431的最重要的区别在于CC2431比CC2430多一个无线定位跟踪引擎,此引擎用于计算无线网络中定位节点的位置。
CC2430/CC2431芯片的主要特点如下:(1)高性能和低功耗的8051微控制器核;(2)集成符合IEEE802.15.4标准的2.4GHz的RF无线电收发机;(3)优良的无线接收灵敏度和强大的抗干扰性;(4)在休眠模式时仅0.9μA的流耗,外部的中断或RTC能唤醒系统;在待机模式时少于0.6μA的流耗,外部的中断能唤醒系统;(5)硬件支持CSMA/CA功能;(6)较宽的电压范围(2.0~3.6 V);(7)数字化的RSSI/LQI支持和强大的DMA 功能;(8)具有电池监测和温度感测功能;(9)集成了14位模数转换的ADC;(10)集成AES安全协处理器;(11)带有2个强大的支持几组协议的USART,以及1个符合I EEE 802.15.4规范的MAC 计时器,1个常规的16位计时器和2个8位计时器;(12)ZigBee/802.05.4全兼容的硬件层、物理层;(13)集成1个高精度的定位跟踪引擎。
3 ZigBee无线定位系统工作原理在CC2430/CC2431组成的无线定位网络中,包括网关、参考节点以及定位节点三大部分。
其中,网关负责整个定位无线网络服务和协调;参考节点为已知位置的节点,由系统初始化其固定不变的物理位置;定位节点是位置随时变化的需要进行定位的移动节点,CC2431具体位置由CC2431的定位引擎通过接收参考节点的信号强度值经过定位算法而得到。
其原理为:假设已知发射节点的发射信号强度, 接收节点根据接收信号的强度, 计算出信号的传播损耗,然后利用信号传播理论和信道经验模型计算出距离,通过利用三边测量法或者三角测量法最终计算出节点的位置,该节点定位算法需要多个参考节点。
根据该算法 CC2431可以根据已知位置的参考节点计算出其余定位节点的坐标。
定位估计需要3~8个参考节点, 最高定位精度可达0.5m,定位区域为64m×64m,定位响应时间少于40μs。
而且CC2431通过无线定位跟踪引擎硬件定位计算,消耗非常少的CPU资源。
定位引擎的定位过程为:使能定位引擎,定位节点读取各个参考节点的坐标(X、Y)值,然后读取其他标准参数(A值、N值、RSSI值),然后进行硬件的定位计算,最后输出定位节点的定位坐标,关闭定位引擎。
标准参数中:A值为距离发射机(C C2430/ CC2431)1m远的RSSI绝对值;N值为距离发射机每增加1m衰减的RSSI绝对值;RSSI为CC2430/ CC2431信号强度,单位为dBm。
4 ZigBee无线定位系统硬件设计本系统主要由主机、网关、参考节点和定位节点组成。
主机是计算机,在主机上运行相关界面化软件,便于进行系统的建立和观测;网关采用CC2430芯片为核心,与相关外围电路组成无线高频模块,用于实现无线数据的收发,在每个区域中,网关充当协调器的角色,通过RS232串口与主机进行通信,接收主机信息后无线发送给各个节点并将节点信息传送给计算机;参考节点也采用CC2430设计,在网络中充当路由器的角色,并且在定位系统中,由用户设定其固定的坐标,以此为定位节点提供该坐标和RSSI平均值;定位节点采用CC2431芯片为核心,其内部比CC2430芯片多一个定位引擎,可以根据参考节点提供的固定坐标和RSSI平均值计算出自身的坐标值,并把该坐标值和定位节点的节点标志号发送给网关。
无线网络进行无线通讯的核心即无线高频模块,网关、参考节点、定位节点均由CC2430或CC2431与相关的外围电路组成无线高频模块以进行组网和数据的收发。
另外,网关、参考节点、定位节点均通过便携式的两节CR2430电池进行供电。
5 ZigBee无线定位系统软件设计本ZigBee 系统以TI 提供的免费协议栈ZigBee 2006协议栈为基础,采用基于C/C++的I AR Em-bedded Workbench 应用开发工具开发、编译和调试程序,用CC2430/CC2431芯片公司Chipcon/TI 提供的SmartRF04Prog 软件修改芯片物理地址和下载程序。
通过LabVIEW 编写图形化程序对串口数据进行分析,以实现ZigBee 无线定位系统系统启动示警、参数修改、参考节点和定位节点的初始化、实时图形显示节点位置等功能。
将程序下载到各节点后,定位系统的网络建立和功能实现均通过基于LabVIEW 的串口分析监控软件实现。
LabVIEW 系统监控软件流程图如图1所示。
图1 LabVIEW系统监控软件流程图系统操作过程如下:首先,配置LabVIEW 的串口通道和波特率,运行LabVIEW 程序,然后将网关和参考节点上电,LabVIEW 系统监控软件会首先判断系统是否建立,若建立则表示系统建立的绿灯被点亮。
其次,LabVIEW 系统监控软件检测系统中的参考节点,将其地址值显示在界面上,用户手动为每个参考节点配置X 、Y 值,配置成功后,参考节点的位置就以绿色节点的形式显示在界面右侧的坐标图上。
然后,上电定位节点,定位节点的地址值也将显示在界面上,用户手动配置系统的A 、N 值和最小参考节点数目,配置成功后定位节点就可以实时的显示在界面右侧的坐标图上。
LabVIEW 系统监控软件界面如图2所示。
图2 LabVIEW系统监控软件界面6 系统性能分析和总结为了验证系统对实时性和准确性的要求,本系统对节点通讯距离、定位精度、系统的响应时间进行了测试,调试过程中使用串口调试工具进行实时数据观测,并通过精确测量距离进行精度验证,见表1。
表1 系统性能分析统计表测试项目测试次数测试结果节点通讯距离10060m 定位精度1000.7m 系统响应时间1000.8s系统测试条件为:3个已知位置的参考节点,通过LabV I EW 系统监控软件设定其坐标分别为(10,70)、(10,70)、(70,70);3个定位节点;A 取值为39dBm ,N 取值为16dBm 。
运行结果如图3所示。
综上所述,基于ZigBee 的无线定位系统具有连接速度快、网络结构清晰、系统耗电量低、可靠性高、便于监控管理等优点。
7 结束语Z ig B e e 技术是随着工业自动化对数据的传输要求而产生和发展的,ZigBee 网络省电、可靠、成本低、容量大、安全,可广泛用于自动化领域。
ZigBee 定位系统功耗低、响应时间短、成本低、定位精度高,在定位领域上仍有较大的开发和应用的空间。
基于LabVIEW 的系统监控软件运行速度快、可靠性高,界面设计更加人性化,为无线定位系统的运行提供了可靠的保证。
参考文献1 李文仲,段朝玉等.ZigBee2006无线网络与无线定位实战[M ].北京:北京航天航空大学出版社, 2008,1.2 金纯,罗祖秋等.技术基础及案例分析[M].北京:国防工业出版社,2008,1.3 封福东,何加铭.ZigBee 无线定位跟踪系统设计[J],杭州电子科技大学学报,2008.28(5).4 夏芮沛,翟超,方俊伟. ZigBee 无线定位系统[J].机电一体化,2008.7.5 C h i p c o n. C C 2431 D a t a S h e e t. C h i p c o n corporation [Z].作者简介:国鑫,硕士研究生,研究方向为检测技术与自动化装置。
图3 系统运行结果第十届“工业自动化与标准化”研讨会将于2011年5月24~25日,在北京-中国职工之家饭店召开。
本次研讨会将以高端智能装备中测控技术与应用为主题,围绕企业系统中的设备与集成、工业控制网络、测控设备和工业自动化中的能效等四个板块展开研讨。
2011年正值我国“十二五”发展计划开局之年,是我国高端智能装备向先进制造技术、信息技术和人工智能技术集成方向发展的关键时期。
为有助于研究院所、企业、用户更加深刻地了解国家有关政策,使我国装备制造业向自动化、智能化、信息化、精密化、绿色化迈进,提高其市场竞争力,主办单位全国工业过程测量和控制标准化技术委员会(SAC/TC124)秘书处将邀请国家有关主管部门领导向与会代表解读《国家“十二五”纲领计划对自动化和智能化与高端智能装备及基础制造装备发展趋势的影响》。
同时,IEC/TC65主席及秘书长也将亲临现场,介绍国际自动化领域的最新信息和未来发展趋势。
为使与会代表更加形象深刻地了解目前高端智能装备中测控技术与应用,研讨会会场特别开辟系统展示专区和论文张贴专区,以便企业向到场来宾展示最先进的行业解决方案和最新产品。
展示十年来自动化行业的技术和产品的发展,研讨会将配套出版《第十届“工业自动化与标准化”技术研讨会配套论文集》,以行业资深专家解读行业发展状况、用户分享应用案例、知名企业介绍解决方案等多种方式做深入探讨。
第十届“工业自动化与标准化”研讨会创新地将主题演讲、现场演示、配套论文集和网络同步直播巧妙地整合于一体,其组织形式和主题确立均体现了技术性、创新性、权威性和实用性,届时将吸引产品制造商、系统集成商、科研院所及最终用户等300余名国内外同行专家、代表应邀出席会议。