基于MATLAB软件的四足步行机器人的运动学仿真_李赫
- 格式:pdf
- 大小:506.82 KB
- 文档页数:2
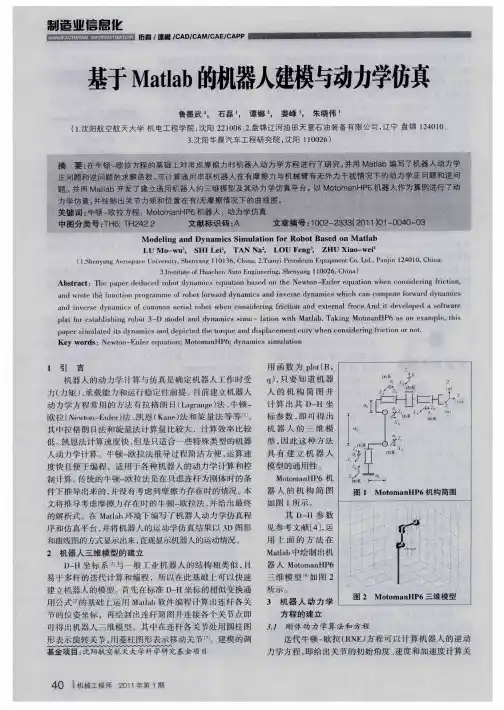
基于MATLAB 的UR10机器人运动学分析与仿真Kinematics analysis and simulation of UR10 robot based on MATLAB马国庆,刘 丽,于正林,曹国华,陈李博MA Guo-qing, LIU Li, YU Zheng-lin, CAO Guo-hua, CHEN Li-bo(长春理工大学 机电学院,长春 130022)摘 要:对UR10智能协作机器人进行建模,求解出机器人D-H模型参数,并对机器人的正逆运动学进行分析,求解出正运动学中各连杆坐标系的转换关系以及逆运动学中各关节转角。
并用MATLAB 进行了运动学的仿真与方程计算,通过数据对比分析验证了其运动学模型与运动学正逆运算的正确性。
关键词:工业机器人;运动学;MATLAB;仿真中图分类号:N34 文献标识码:A 文章编号:1009-0134(2019)10-0087-04收稿日期:2018-09-06基金项目:吉林省科技发展计划资助项目(20160204016GX ,20180623031TC );吉林省省级产业创新专项资金资助 项目(2016C088;2017C045-2);长春理工大学青年科学基金(XQNJJ-2016-04;XQNJJ-2017-11);吉林 省教育厅十三五科学技术项目(JJKH20170626KJ )作者简介:马国庆(1988 -),男,讲师,博士,研究方向为机器人技术。
0 引言随着现代工业向智能化与自动化发展,机器人逐渐融入社会各个领域,而机器人的运动学分析是机器人技术研究中的关键环节[1]。
本文以UR10为实验平台,对机器人各关节与各连杆进行分析并得到相关的模型参数,并将其应用于正逆运动学求解。
用MATLAB 进行运动学仿真,通过数据对比分析验证模型与运动学正逆运算的正确性。
为机器人轨迹规划研究提供必要的理论基础。
1 机器人模型的空间描述与变换关系要使机器人实现空间中某种运动,首先需要建立一个基坐标系,然后在此基坐标系下研究机器人的相关参数和位姿。
MATLAB仿真程序1、摘要:简要介绍仿真程序的目的和应用领域。
2、简介2.1 背景:介绍仿真技术的背景和发展趋势。
2.2 目标:阐述本文档旨在实现的目标和预期成果。
2.3 使用范围:说明本文档适用的MATLAB版本和相关工具。
3、系统需求3.1 软件需求:列出在运行仿真程序时需要的MATLAB版本和相关工具。
3.2 硬件需求:描述在运行仿真程序时所需的最低硬件配置要求。
4、数据准备4.1 输入数据:说明仿真程序所需的输入数据,包括模型、环境参数、运动规划等。
4.2 数据处理:描述对输入数据进行预处理和转换的方法和算法。
5、仿真实现5.1 建模:介绍如何使用MATLAB建立模型。
5.2 运动规划:讲解如何使用运动规划算法的轨迹。
5.3 运动控制:详细说明如何控制的关节运动和末端执行器的运动。
6、结果分析6.1 数据保存:指示如何保存仿真过程和结果的数据。
6.2 数据可视化:说明如何使用MATLAB绘制仿真结果图表。
6.3 结果评估:解析实验结果,验证仿真程序的准确性和可行性。
7、总结和下一步工作简要总结此次仿真程序的实现和结果,提出改进的建议,并探讨下一步工作的方向。
附件:本文档涉及的附件包括:- 模型文件- 仿真环境场景文件- 运动规划算法实现代码- 仿真结果数据文件法律名词及注释:1、版权:著作权法规定的著作物享有的法律保护。
2、许可证:根据许可证要求,特定行为(如使用、复制、修改)被允许或拒绝使用。
3、商标:商标是注册商标办公室注册的标志,用于识别产品或服务来源。
4、法律依据:涉及到法律的相关内容,应根据当地法律依据进行操作。
机器人matlab仿真课程设计一、教学目标本课程的教学目标是使学生掌握机器人Matlab仿真基本原理和方法,能够运用Matlab进行简单的机器人系统仿真。
具体分解为以下三个目标:1.知识目标:学生需要了解机器人Matlab仿真的基本原理,掌握Matlab在机器人领域中的应用方法。
2.技能目标:学生能够熟练使用Matlab进行机器人系统的仿真,包括建立仿真模型、设置仿真参数、运行仿真实验等。
3.情感态度价值观目标:通过课程学习,培养学生对机器人技术的兴趣和热情,提高学生解决实际问题的能力,培养学生的创新精神和团队合作意识。
二、教学内容教学内容主要包括以下几个部分:1.Matlab基础知识:介绍Matlab的基本功能和操作,包括数据处理、图形绘制、编程等。
2.机器人数学模型:介绍机器人的运动学、动力学模型,以及传感器和执行器的数学模型。
3.机器人仿真原理:讲解机器人仿真的一般方法和步骤,包括建立仿真模型、设置仿真参数、运行仿真实验等。
4.机器人控制系统仿真:介绍机器人控制系统的结构和原理,以及如何使用Matlab进行控制系统仿真。
5.机器人路径规划仿真:讲解机器人在复杂环境中的路径规划方法,以及如何使用Matlab进行路径规划仿真。
三、教学方法为了达到上述教学目标,我们将采用以下教学方法:1.讲授法:通过讲解和演示,使学生了解机器人Matlab仿真的基本原理和方法。
2.案例分析法:通过分析实际案例,使学生掌握Matlab在机器人领域中的应用。
3.实验法:让学生亲自动手进行机器人仿真实验,巩固所学知识,提高实际操作能力。
4.小组讨论法:鼓励学生分组讨论,培养学生的团队合作意识和解决问题的能力。
四、教学资源为了支持教学内容的实施,我们将准备以下教学资源:1.教材:《机器人Matlab仿真教程》。
2.参考书:相关领域的研究论文和书籍。
3.多媒体资料:教学PPT、视频教程等。
4.实验设备:计算机、Matlab软件、机器人仿真实验平台。
基于MATLAB的PUMA机器人运动仿真研究
基于MATLAB的PUMA机器人运动仿真研究摘要:机器人运动学是机器人学的一个重要分支,是实现机器人运动控制的基础。
论文以D-H坐标系理论为基础对PUMA560机器人进行了参数设计,利用MATLAB机器人工具箱,对机器人的正运动学、逆运动学、轨迹规划进行了仿真。
Matlab仿真结果说明了所设计的参数的正确性,能够达到预定的目标。
关键词:机器人PUMA560 D-H坐标系运动学轨迹规划
机器人运动学的研究涉及大量的数学运算,计算工作相当繁锁。
因此,采用一些工具软件对其分析可大大提高工作效率,增加研究的灵活性和可操作性。
对机器人进行图形仿真,可以将机器人仿真的结果以图形的形式表示出来,从而直观地显示出机器人的运动情况,得到从数据曲线或数据本身难以分析出来的许多重要信息,还可以从图形上看到机器人在一定控制条件下的运动规律[1]。
论文首先设计了PUMA560机器人的各连杆参数,然后讨论了正、逆运动学算法,轨迹规划问题,最后在MATLAB环境下,运用Robotics Toolbox,编制简单的程序语句,快速完成了机器人得运动学仿真。
设机械手起始位置位于A点,qA=[000000],即表示机器人的各关节都处于零位置处。
机械手在B点和C点相对于基坐标系的位姿可用齐次变换矩阵TB和TC来表示。
图2所示为机械手臂在A点时的三维图形。
毕业设计(论文)四足步行机器人腿的机构设计学生姓名:学号:所在系部:专业班级:指导教师:日期:摘要本文介绍了国内外四足步行机器人的发展状况和三维制图软件SolidWorks的应用,着重分析了设计思想并对行走方式进行了设计并在此软件基础上四足步行机器人腿进行了绘制,对已绘制的零部件进行了装配和三维展示。
展示了SolidWorks强大的三维制图和分析功能。
同时结合模仿四足动物形态展示出了本次设计。
对设计的四足行走机器人腿进行了详细的分析与总结得出了该机构的优缺点。
本文对四足机器人腿的单腿结构分析比较详细,并结合三维进行理性的理解。
关键词:SolidWorks;足步行机器人腿AbstractIn this paper, fouth inside and outside the two-legged walking robot and the development of three-dimensional mapping of the application of SolidWorks software, focused on an analysis of design concepts and approach to the design of walking and the basis of this software quadruped walking robot legs have been drawn on components have been drawn to the assembly and three-dimensional display. SolidWorks demonstrated a strong three-dimensional mapping and analysis functions. At the same time, combined with four-legged animal patterns to imitate the design show. The design of four-legged walking robot legs to carry out a detailed analysis and arrive at a summary of the advantages and disadvantages of the institution. In this paper, four single-legged robot more detailed structural analysis, combined with a rational understanding of three-dimensional.Keywords:SolidWorks; four-legged walking robot目录摘要 (I)Abstract (II)1 绪论 (1)1.1 步行机器人的概述 (1)1.2 步行机器人研发现状 (1)1.3 存在的问题 (5)2 四足机器人腿的研究 (6)2.1 腿的对比分析 (6)2.1.1 开环关节连杆机构 (6)2.1.2 闭环平面四杆机构 (9)2.2 腿的设计 (11)2.2.1 腿的机构分析 (12)2.2.2 支撑与摆动组合协调控制器 (18)2.3 单条腿尺寸优化 (21)2.3.1 数学建模 (21)2.3.2 运动特征的分析 (23)2.4 机器人腿足端的轨迹和运动分析 (24)2.4.1 机器人腿足端的轨迹分析 (24)2.4.2 机器人腿足端的运动分析 (27)3 机体设计 (30)3.1 机体设计 (30)3.1.1 机体外壳设计 (30)3.1.2 传动系统设计 (31)3.2 利用Solid Works进行腿及整个机构辅助设计 (35)4 结论 (36)4.1 论文完成的主要工作 (36)4.2 总结 (36)参考文献 (37)致谢 (39)1绪论1.1 步行机器人的概述机器人相关的研发和应用现如今早已变成每个国家的重要科研项目之一,通过运用机器人来代替人们的某些危险工作或者帮助残疾人完成自己所不能完成的事情。
毕业设计任务书1.设计的主要任务及目标运用大学四年所学理论知识,并查阅相关资料和文献,分析研究按仿生学原理研发的仿象鼻机械手臂,熟悉掌握MATLAB编程工具,对仿象鼻机器人造型及运动仿真。
通过毕业设计的过程,了解问题分析和解决的研究过程、步骤和方法,进而培养和提高自己知识和技能综合运用能力,加强创新意识。
2.设计的基本要求和内容基本要求:设计应在指导教师指导下独立完成;按格式要求写作;同时做到结构合理,理论论据充分;并进行深入分析,见解独到。
内容:机器人技术是一门多学科融合的复杂问题,运用仿真计算,可以加快研究时间和节省成本。
本毕业设计是基于Matlab仿真环境,利用仿真工具包进行二次开发,对机器人进行运动学仿真。
3.主要参考文献[1]陈恳.机器人技术与应用[M].北京:清华大学出版社,2006[2]薛定宇,陈阳泉.基于MATLAB/Sixnulink的系统仿真技术与应用[M].北京:清华大学出版社,2002[3]蔡自兴.机器人学[M].北京:机械工业出版社,2009[4]孙树栋.工业机器人技术基础[M].西安:西北工业大学出版社,2006基于MATLAB仿象鼻机器人造型及运动仿真摘要:按照一定的要求对仿象鼻机器人进行参数设计,讨论了该机器人的运动学问题,然后在matlab环境下,对该机器人的正运动学、逆运动学、轨迹规划进行仿真。
通过仿真,观察到了机器人各个关节的运动,并得到了所需的数据,说明了所设计的参数是正确的,从而能够达到预定的目标。
利用MATLAB语言强大的数值计算能力实现仿象鼻机器人机构的运动仿真,为仿象鼻机器人机构的设计及分析提供一条便捷的途径。
关键词:MATLAB,仿象鼻机器人,运动学仿真,轨迹规划Trunk robot modeling and motion simulationbased on MATLABAbstracts:According to certain requirements to parameter design of bionic trunk robot, the kinematics of the robot is discussed, and then in the matlab environment, forward kinematics and inverse kinematics of the robot, the trajectory planning. Observed by simulation robot movement of each joint, and the required data is obtained, which shows the designed parameters are correct, so that they can reach a predetermined target. Imitation by using MATLAB powerful numerical calculation ability, trunk robot mecha nism movement simulation, for imitation trunk for the design and analysis of robot mechanism provides a convenient way.Key words:MATLAB ,trunk robot ,motion simulation ,Trajectory planning目录1前言 (1)1.1课题介绍 (1)1.2课题目的、方案和意义 (4)2仿象鼻机器人的造型及坐标系建立 (6)2.1仿象鼻机器人的造型 (6)2.2各关节坐标系的建立和D-H变换 (7)3机器人运动学仿真算法 (9)3.1机器人正向运动学问题 (9)3.2机器人逆向运动学问题 (12)4轨迹规划 (13)5MATLAB运动仿真 (14)5.1Robotics Toolbox建模 (14)5.2仿象鼻机器人动作姿态 (17)5.2.1仿象鼻机器人伸展动作姿态 (17)5.2.2仿象鼻机器人弯曲动作姿态 (18)5.2.3仿象鼻机器人蜿蜒动作姿态 (19)5.3命令函数调用 (20)5.3.1fkine函数调用 (20)5.3.2ikine函数调用 (20)5.3.3jtraj函数调用 (21)5.4仿象鼻机器人动作轨迹规划 (23)5.4.1弯曲动作轨迹规划 (23)5.4.2蜿蜒动作轨迹规划 (25)6仿真结果分析 (27)结论 (28)参考文献 (29)致谢 (30)1前言1.1课题介绍MATLAB已成为国际上最流行的科学与工程计算软件,它在国内外高校和科研部门正扮演着越来越重要的角色,功能也越来越强大。

设备管理与维修2019翼9(上)轴号工作范围/毅最高速度/(毅/s )1#轴-180~1801802#轴-90~1501803#轴-245~651854#轴-200~2003855#轴-115~1154006#轴-400~400460基于MATLA B的ABB IRB1600机器人运动学仿真王沐雨,黄民,吴国新(北京信息科技大学,北京100192)摘要:为了验证工业机器人ABB IRB1600的运动学性能,依据其基本结构及参数,利用改进的D-H 方法在MATLAB 中进行机器人建模,调用MATLAB 机器人工具箱中的fkine 函数进行正———逆运动学仿真,并选择关节空间轨迹规划法对该机器人进行运动轨迹研究,最后得到了各关节空间的运动位移、角速度和角加速度的曲线,实现了对ABB IRB1600机器人的运动学仿真。
关键词:改进的D-H 方法;机器人运动学仿真;MATLAB 中图分类号:TP242文献标识码:B DOI :10.16621/ki.issn1001-0599.2019.09.170引言随着工业技术的发展,单纯的手工劳动早已不能满足现代社会的基本需求,工业机器人应运而生,大大提高了生产效率,是智能化社会发展的重要一步。
瑞典的ABB 公司有巨大的影响力,是目前世界上工业机器人四大巨头之一。
在工业机器人依旧昂贵的市场背景下,盲目安装可能会导致人力物力的浪费。
随着计算机智能设备的发展,计算机虚拟仿真模拟技术也愈渐成熟。
研究人员通过在计算机上建立工业机器人的仿真模型,使其具有与真实机器人类似的物理功能。
例如MATLAB 中的Robotics Toolbox (机器人工具箱),它包括了种类众多的功能函数,可以对工业机器人进行运动学仿真,这大大减少了资源浪费。
1ABB IRB1600机器人基本结构ABB IRB1600是ABB 公司旗下的一款六自由度的串联型机器人,它具有广泛的应用,在码垛、测量等领域都有优越的表现(图1、表1)。
基于MATLAB的机器人运动学仿真与轨迹规划王晓明;宋吉;庞浩帅【摘要】为研究机器人的轨迹规划,在MATLAB环境下,建立了机器人坐标系并显示其D-H矩阵,确定机器人的连杆运动参数,对机器人的正、逆运动学问题进行分析.通过对机器人的轨迹规划仿真,分析了机器人运动过程中的关节稳定性,如位移、速度、加速度变化等直观地显示了机器人关节的运动,得到了连续平滑的机器人关节角度轨迹曲线与末端位姿规划曲线.仿真实验表明,所设计的运动学参数是正确的,从而达到了预定的目标.【期刊名称】《电子设计工程》【年(卷),期】2019(027)007【总页数】5页(P109-112,117)【关键词】机器人;轨迹规划;MATLAB;仿真【作者】王晓明;宋吉;庞浩帅【作者单位】兰州理工大学电气工程与信息工程学院,甘肃兰州730050;兰州理工大学电气工程与信息工程学院,甘肃兰州730050;兰州理工大学电气工程与信息工程学院,甘肃兰州730050【正文语种】中文【中图分类】TN242.2分析机器人运动学是研究机器人的重要前提,其中包括机器人相对于固定坐标系运动的几何学,在特定工作环境下对机器人进行动力学分析、轨迹规划和控制机器人的任务执行。
所有不同机构的机器人实质上是由一系列关节和连杆连接的[1]。
根据相邻关节与连杆间的旋转、平移变换可以推导机器人运动学建模的过程[2],求解运动学的逆解[3]。
机器人的逆解表明了末端位姿在可达工作空间的运动情况,但是逆解数目与关节数目、连杆参数、关节变量息息相关,涉及十分繁琐复杂的数学运算[4]。
为了提高效率,更加直观理解关节速度对末端线速度与角速度的影响,采用了MATLAB中Robotics Toolbox的机器人函数[5],对机器人进行正逆运动学仿真和求解给定机器人的雅可比矩阵,并进行解的轨迹规划实现最优解[6]。
1 运动学分析1.1 六自由度机器人D-H坐标系为描述机器人和机器人的相对运动关系,通常采用的建模方法是由Denavit和Hartenberg提出的D-H参数法[7]。
仿生四足机器人步态规划与仿真研究步态规划是仿生四足机器人研究中的一个重要方向。
步态规划是指通过研究和设计机器人的运动序列,使机器人能够以一种稳定、高效的方式行走。
步态规划的目标是使机器人能够在不同的工作环境中以最小的能耗完成任务。
在进行步态规划时,需要考虑多种因素,如机器人的机械结构、运动学模型、动力学特性等。
首先需要建立机器人的运动学模型,通过求解运动学方程得到机器人各关节的运动轨迹。
然后,根据机器人的运动学模型,计算出机器人的动力学特性,包括关节力和末端力矩等。
通过优化算法对机器人的步态进行规划,使机器人的运动轨迹最优化。
为了验证步态规划的效果,需要进行仿真研究。
仿真研究可以通过建立仿真模型,模拟机器人在不同环境中的运动情况。
通过对仿真模型中的参数进行调整,可以观察到机器人在不同条件下的步态变化。
通过对仿真结果的分析,可以评估不同步态规划算法的性能,并为实际机器人的步态规划提供指导。
目前,对仿生四足机器人步态规划与仿真的研究尚处于起步阶段,仍需要更多的理论和实践探索。
未来的研究可以从以下几个方面展开:一是进一步完善机器人的步态规划算法,提高机器人的运动效率和适应性;二是构建更加精确的仿真模型,包括机器人的机械结构、关节运动学和动力学特性等,以提高仿真结果的准确性;三是考虑复杂的工作环境,如不平坦地面、障碍物等,进一步提高机器人的适应性和抗干扰能力。
步态规划与仿真研究对于提高仿生四足机器人的运动能力和适应性具有重要意义。
通过不断的研究和探索,相信仿生四足机器人在不久的将来将能够在各个领域得到更广泛的应用。
机器人matlab仿真课程设计一、课程目标知识目标:1. 让学生理解机器人matlab仿真的基本概念,掌握仿真环境的搭建方法;2. 使学生掌握机器人运动学、动力学的基本理论知识,并能在matlab中进行建模与仿真;3. 引导学生运用matlab编程实现机器人路径规划与控制策略,了解不同算法的优缺点。
技能目标:1. 培养学生运用matlab软件进行机器人仿真的操作能力;2. 培养学生分析问题、解决问题的能力,提高编程与调试技巧;3. 提高学生团队协作和沟通能力,学会在项目中共同解决问题。
情感态度价值观目标:1. 培养学生对机器人仿真技术的兴趣,激发创新意识和探索精神;2. 引导学生树立正确的价值观,认识到机器人技术在社会发展中的重要作用;3. 培养学生严谨、务实的科学态度,提高对科学研究的敬畏之心。
分析课程性质、学生特点和教学要求,本课程旨在让学生掌握机器人matlab 仿真的基本知识和技能,培养具备实际操作能力的高素质人才。
课程目标具体、可衡量,便于学生和教师在教学过程中进行评估和调整。
后续教学设计和评估将围绕这些具体学习成果展开。
二、教学内容1. 机器人matlab仿真基础- 机器人仿真概述- matlab软件操作基础- 仿真环境搭建2. 机器人运动学仿真- 运动学基本理论- 坐标变换与运动方程- matlab运动学建模与仿真3. 机器人动力学仿真- 动力学基本理论- 动力学方程建立- matlab动力学建模与仿真4. 机器人路径规划与控制- 路径规划算法介绍- 控制策略与算法实现- matlab路径规划与控制仿真5. 实践项目与案例分析- 项目要求与分组- 机器人仿真实践操作- 成果展示与案例分析教学内容依据课程目标,结合课本知识体系,确保科学性和系统性。
教学大纲明确教学内容安排和进度,涵盖机器人matlab仿真的各个关键环节。
学生通过本章节学习,能够全面掌握机器人仿真技术的基本知识和实践技能。
基于MATLAB的MH50II机器人运动学分析与仿真作者:黄家俊孙宇峰来源:《昆明民族干部学院学报》2017年第02期[摘要]运动学分析和仿真是研究机器人运动的基础,同时为了给机器人轨迹规划提供一种新的思路,文章以安川MH50II机器人为研究对象,利用D-H法建立连杆坐标系和运动学方程。
依据于Robotics TOOlbOX工具箱建立仿真模型,进行正逆运动学仿真以及在关节空间中对轨迹进行仿真。
仿真结果表明,所建立的运动学方程符合运动学标准,同时,轨迹仿真的曲线平滑无突变,表明了运动轨迹符合设计要求。
[关键词]MH50II机器人;运动学;Matlab;仿真机器人是现代文明的产物,它的出现是现代化发展的集中体现。
机器人技术包含了多种先进的学科,机械设计、人工智能、电子技术、传感器技术等技术领域的综合应用,使得它成为当今科学界热门的技术领域之一。
机器人在实际运动过程中可能会发生运动轨迹与预期结果有较大偏差,因而对机器人进行运动学分析仿真是保证机器人能够稳定运行的前提。
本文以安川MH50II机器人为研究对象,建立运动学方程。
同时,利用机器人工具箱完成模型的创建,并进行运动仿真。
同时,值得注意的是,本文所进行的仿真都是在RoboticsToolbox工具箱下进行的。
1.MH5011机器人连杆坐标系的建立MH50II机器人主要作为搬运机器人和喷涂机器人来使用,它的旋转关节和移动关节各有三个。
D-H法于1995年被提出,主要是为解释连杆之间如何变换。
连杆坐标系的建立为运动的描述提供了帮助,坐标之间的变换需要分几个独立的步骤来实现,这里选择用两个旋转变换和两个平移变换运动来实现运动的分解,如图1。
2.MH5011机器人的运动学分析2.1正运动学分析机器人运动学分析是指机器人末端执行器以及与各关节变量之间的位移分析、速度分析、加速度分析。
正运动学分析是先构建出D-H连杆坐标系,然后进行基本坐标变换运动得到相邻连杆坐标系的齐次变换矩阵,通过传递公式最终得到机器人的末端执行器相对于基座的位姿矩阵。
一种四足机器人液压系统仿真建模方法
四足机器人是一种能够模拟动物步态的机器人,它可以在不平坦的地面上行走,具有很强的适应性和稳定性。
液压系统是四足机器人的重要组成部分,它能够提供足够的动力和控制机器人的运动。
为了更好地设计和优化四足机器人的液压系统,需要进行仿真建模。
仿真建模可以模拟机器人在不同工况下的运动和液压系统的工作状态,从而评估系统的性能和优化设计。
在进行四足机器人液压系统仿真建模时,需要考虑以下几个方面: 1. 机器人的运动学模型:机器人的运动学模型可以描述机器人的运动轨迹和姿态,包括机器人的关节角度、位置和速度等参数。
2. 液压系统的动力学模型:液压系统的动力学模型可以描述液压系统的工作状态,包括液压泵、液压缸、液压阀等组件的工作原理和参数。
3. 控制系统的模型:控制系统的模型可以描述机器人的控制策略和控制器的工作原理,包括控制器的输入和输出信号、控制算法等。
通过以上三个方面的模型,可以建立一个完整的四足机器人液压系统仿真模型。
在模型中,可以设置不同的工况和参数,例如机器人的负载、地形、速度等,从而模拟机器人在不同情况下的运动和液压系统的工作状态。
通过仿真模型,可以评估液压系统的性能和优化设计。
例如,可以评估液压系统的功率、效率、响应速度等指标,从而优化液压系统的设计和参数选择。
同时,还可以评估机器人的稳定性、适应性等指标,从而优化机器人的控制策略和运动学模型。
四足机器人液压系统仿真建模是一种重要的工具,可以帮助设计师更好地设计和优化机器人的液压系统,提高机器人的性能和稳定性。
基于MATLAB教学型机器人空间轨迹仿真robotic toolbox for matlab工具箱1. PUMA560的MATLAB仿真要建立PUMA560的机器人对象,首先我们要了解PUMA560的D-H参数,之后我们可以利用Robotics Toolbox工具箱中的link和robot函数来建立PUMA560的机器人对象。
其中link函数的调用格式:L = LINK([alpha A theta D])L =LINK([alpha A theta D sigma])L =LINK([alpha A theta D sigma offset])L =LINK([alpha A theta D], CONVENTION)L =LINK([alpha A theta D sigma], CONVENTION)L =LINK([alpha A theta D sigma offset], CONVENTION)参数CONVENTION可以取‘standard’和‘modified’,其中‘standard’代表采用标准的D-H参数,‘modified’代表采用改进的D-H参数。
参数‘alpha’代表扭转角,参数‘A’代表杆件长度,参数‘theta’代表关节角,参数‘D’代表横距,参数‘sigma’代表关节类型:0代表旋转关节,非0代表移动关节。
另外LINK还有一些数据域:LINK.alpha%返回扭转角LINK.A%返回杆件长度LINK.theta%返回关节角LINK.D%返回横距LINK.sigma%返回关节类型LINK.RP%返回‘R’(旋转)或‘P’(移动)LINK.mdh%若为标准D-H参数返回0,否则返回1LINK.offset%返回关节变量偏移LINK.qlim%返回关节变量的上下限[min max]LINK.islimit(q)%如果关节变量超限,返回-1, 0, +1LINK.I%返回一个3×3 对称惯性矩阵LINK.m%返回关节质量LINK.r%返回3×1的关节齿轮向量LINK.G%返回齿轮的传动比LINK.Jm%返回电机惯性LINK.B%返回粘性摩擦LINK.Tc%返回库仑摩擦LINK.dhreturn legacy DH rowLINK.dynreturn legacy DYN row其中robot函数的调用格式:ROBOT%创建一个空的机器人对象ROBOT(robot)%创建robot的一个副本ROBOT(robot, LINK)%用LINK来创建新机器人对象来代替robotROBOT(LINK, ...)%用LINK来创建一个机器人对象ROBOT(DH, ...)%用D-H矩阵来创建一个机器人对象ROBOT(DYN, ...)%用DYN矩阵来创建一个机器人对象2.变换矩阵利用MA TLAB中Robotics Toolbox工具箱中的transl、rotx、roty和rotz可以实现用齐次变换矩阵表示平移变换和旋转变换。