四足机器人步行腿运动学正反解
- 格式:doc
- 大小:22.50 KB
- 文档页数:4
毕业设计(论文)四足步行机器人腿的机构设计学生姓名:学号:所在系部:专业班级:指导教师:日期:摘要本文介绍了国内外四足步行机器人的发展状况和三维制图软件SolidWorks的应用,着重分析了设计思想并对行走方式进行了设计并在此软件基础上四足步行机器人腿进行了绘制,对已绘制的零部件进行了装配和三维展示。
展示了SolidWorks强大的三维制图和分析功能。
同时结合模仿四足动物形态展示出了本次设计。
对设计的四足行走机器人腿进行了详细的分析与总结得出了该机构的优缺点。
本文对四足机器人腿的单腿结构分析比较详细,并结合三维进行理性的理解。
关键词:SolidWorks;足步行机器人腿AbstractIn this paper, fouth inside and outside the two-legged walking robot and the development of three-dimensional mapping of the application of SolidWorks software, focused on an analysis of design concepts and approach to the design of walking and the basis of this software quadruped walking robot legs have been drawn on components have been drawn to the assembly and three-dimensional display. SolidWorks demonstrated a strong three-dimensional mapping and analysis functions. At the same time, combined with four-legged animal patterns to imitate the design show. The design of four-legged walking robot legs to carry out a detailed analysis and arrive at a summary of the advantages and disadvantages of the institution. In this paper, four single-legged robot more detailed structural analysis, combined with a rational understanding of three-dimensional.Keywords:SolidWorks; four-legged walking robot目录摘要 (I)Abstract (II)1 绪论 (1)1.1 步行机器人的概述 (1)1.2 步行机器人研发现状 (1)1.3 存在的问题 (5)2 四足机器人腿的研究 (6)2.1 腿的对比分析 (6)2.1.1 开环关节连杆机构 (6)2.1.2 闭环平面四杆机构 (9)2.2 腿的设计 (11)2.2.1 腿的机构分析 (12)2.2.2 支撑与摆动组合协调控制器 (18)2.3 单条腿尺寸优化 (21)2.3.1 数学建模 (21)2.3.2 运动特征的分析 (23)2.4 机器人腿足端的轨迹和运动分析 (24)2.4.1 机器人腿足端的轨迹分析 (24)2.4.2 机器人腿足端的运动分析 (27)3 机体设计 (30)3.1 机体设计 (30)3.1.1 机体外壳设计 (30)3.1.2 传动系统设计 (31)3.2 利用Solid Works进行腿及整个机构辅助设计 (35)4 结论 (36)4.1 论文完成的主要工作 (36)4.2 总结 (36)参考文献 (37)致谢 (39)1绪论1.1 步行机器人的概述机器人相关的研发和应用现如今早已变成每个国家的重要科研项目之一,通过运用机器人来代替人们的某些危险工作或者帮助残疾人完成自己所不能完成的事情。
四足机器人控制算法
四足机器人的控制算法涉及到多个方面,包括步态生成、运动规划、力矩控制等。
下面是一般用于四足机器人控制的一些基本算法:
1. 步态生成算法:
-行走周期:确定每步的时间周期。
-支撑相和摆动相:在一个步态周期中,确定哪些腿是支撑在地面上的,哪些腿是摆动的。
2. 运动规划算法:
-逆运动学:确定每个关节角度,以实现期望的末端效应器的位置。
-前馈控制:根据期望的运动轨迹,预测并施加相应的力或力矩,以优化运动。
3. 传感器融合:
-使用传感器(例如惯性测量单元、摄像头等)获取机器人周围环境的信息,以调整步态和避免碰撞。
4. 力矩控制算法:
- PID控制:使用比例、积分和微分项来调整关节力矩,以实现期望的运动。
-模型预测控制(MPC):基于机器人的动力学模型进行预测,然后优化控制输入,以最小化误差。
5. 路径规划和避障算法:
-确保机器人在执行任务时能够避开障碍物,包括静态和动态障碍物。
-可以使用基于地图的路径规划算法,如A*算法,或者利用传感器信息实时规划路径。
6. 学习算法:
-强化学习:使用强化学习算法,例如深度强化学习(DRL),来优化步态和运动规划。
-监督学习:通过示例数据进行监督学习,提高机器人在不同任务上的性能。
需要注意的是,四足机器人的控制算法通常是一个复杂的系统,需要综合考虑机器人的动力学、传感器信息、任务需求等多个因素。
同时,实际应用中可能需要不同的算法组合,具体的选择也取决于机器人的设计和应用场景。
机器人的正运动学和逆运动学
机器人是一种能够自主执行任务的机械设备,它们可以在工业、医疗、军事等领域发挥重要作用。
机器人的运动学是机器人技术中的重要组成部分,其中正运动学和逆运动学是两个重要的概念。
正运动学是指机器人的运动学问题中,已知机器人各关节的角度,求出机器人末端执行器的位置和姿态的过程。
在机器人的正运动学中,需要考虑机器人的结构、关节的类型和数量、关节的运动范围等因素。
正运动学的求解可以通过矩阵变换的方法来实现,其中包括旋转矩阵和平移矩阵等。
逆运动学是指机器人的运动学问题中,已知机器人末端执行器的位置和姿态,求出机器人各关节的角度的过程。
在机器人的逆运动学中,需要考虑机器人的结构、关节的类型和数量、关节的运动范围等因素。
逆运动学的求解可以通过解方程组的方法来实现,其中包括正弦定理、余弦定理等。
机器人的正运动学和逆运动学在机器人技术中具有重要的应用价值。
在机器人的控制系统中,正运动学可以用来实现机器人的位置控制和轨迹规划,逆运动学可以用来实现机器人的姿态控制和路径规划。
在机器人的仿真和设计中,正运动学和逆运动学可以用来验证机器人的运动性能和优化机器人的结构设计。
机器人的正运动学和逆运动学是机器人技术中不可或缺的重要组成
部分,它们为机器人的运动控制和设计提供了重要的理论基础和实践应用。
随着机器人技术的不断发展和应用,正运动学和逆运动学的研究和应用将会越来越广泛。
足式机器人正逆运动学几何法足式机器人是一种能够模仿人类步行的机器人,它具备多自由度的关节和复杂的运动能力。
为了实现足式机器人的运动控制,正逆运动学几何法被广泛应用。
本文将介绍足式机器人正逆运动学几何法的原理和应用。
一、正运动学几何法正运动学几何法用于确定机器人末端执行器的位置和姿态,即给定关节角度,计算末端执行器的位置和姿态。
在足式机器人中,末端执行器通常是机器人的脚部,因为脚部是机器人与地面接触的部分,决定了机器人的稳定性和步态。
正运动学几何法的基本原理是通过坐标变换矩阵来描述机器人的运动。
坐标变换矩阵包括平移矩阵和旋转矩阵,通过将各个关节的运动叠加,可以得到机器人末端执行器的位置和姿态。
二、逆运动学几何法逆运动学几何法用于确定机器人关节角度,即给定末端执行器的位置和姿态,计算关节角度。
在足式机器人中,逆运动学几何法可以用于生成机器人的步态和实现路径规划。
逆运动学几何法的基本原理是通过解析几何方法或数值优化方法来计算关节角度。
解析几何方法适用于简单的机器人结构,可以通过几何关系直接计算关节角度。
数值优化方法适用于复杂的机器人结构,通过迭代计算来逼近关节角度的解。
三、应用足式机器人正逆运动学几何法在机器人领域有着广泛的应用。
首先,正逆运动学几何法可以用于机器人的姿态控制和路径规划。
通过给定目标位置和姿态,可以计算出机器人的关节角度,从而实现机器人的运动控制和路径规划。
正逆运动学几何法可以用于机器人的仿真和优化。
通过建立机器人的正逆运动学模型,可以进行机器人的仿真实验,验证机器人的运动性能和稳定性。
同时,可以通过优化算法来改进机器人的运动性能,使机器人的步态更加稳定和高效。
正逆运动学几何法还可以应用于机器人的故障诊断和校正。
通过监测机器人的关节角度和末端执行器的位置,可以判断机器人是否存在故障,并进行相应的校正和修复。
总结起来,足式机器人正逆运动学几何法是实现机器人运动控制和路径规划的重要方法。
它通过计算关节角度和末端执行器的位置和姿态,实现机器人的运动控制和路径规划。
四足机器人运动规律
四足机器人的运动规律涉及到机器人的步态、步幅、速度、方向控制等方面。
下面是一些关于四足机器人运动规律的基本知识:
1.步态:四足机器人的步态通常有三种类型:行走、奔跑和跳跃。
行走步态是最基本
的步态,通过交替移动四条腿来实现机器人的前进。
奔跑步态是一种更快的行走步
态,通过加快步频和增大步幅来实现。
跳跃步态则是通过同时用后腿蹬地来实现机
器人的跳跃。
2.步幅:步幅是指机器人每一步的长度。
步幅可以通过控制腿部关节的角度和力量来
调整。
较大的步幅可以使机器人更快地移动,但也会增加能量消耗和稳定性的挑战。
3.速度:四足机器人的速度可以通过调整步频和步幅来控制。
增加步频和步幅可以使
机器人更快地移动,但也需要更多的能量和更高的控制要求。
4.方向控制:四足机器人可以通过调整腿部关节的角度和力量来控制移动方向。
例如,
通过向左调整左侧腿部关节的角度,可以使机器人向左转向。
四足蜘蛛机器人行走原理小伙伴们!今天咱们来唠唠超酷的四足蜘蛛机器人的行走原理,那可真是超级有趣呢!咱先想象一下蜘蛛是咋走路的哈。
真正的蜘蛛那小细腿动起来可灵活了。
四足蜘蛛机器人呢,就有点模仿蜘蛛的感觉。
它的腿呀,可不是简单的小棍儿哦。
每一条腿都像是一个小机关,里面有着各种各样的零件相互配合。
它的腿上有好多关节呢,就像我们人的膝盖、脚踝一样。
这些关节可以弯曲和伸展。
比如说,当机器人要向前走的时候,它会先把一条腿抬起来。
这时候,这个腿上靠近身体的关节就像我们抬腿时大腿根儿那儿的关节一样,先动起来,把腿抬高一点。
然后呢,中间的关节再调整一下角度,就像是我们小腿在弯曲调整一样。
腿最下面的关节再动一动,就把腿给伸出去啦。
你看啊,这个腿伸出去可不是乱伸的哦。
它是根据机器人想要去的方向来决定伸的角度的。
要是想往左走呢,左边的腿就会伸得更往左一点,就像我们走路的时候,要是想往左边拐,左脚就会往左迈得大一些。
而且呀,这些腿之间是要相互配合的。
不能这条腿还没抬起来呢,另一条腿就已经伸出去了,那就乱套啦,就像我们走路的时候,两条腿得有个协调劲儿。
再说说它的平衡问题。
四足蜘蛛机器人在行走的时候,就像走钢丝的杂技演员一样,得时刻保持平衡。
当一条腿抬起来的时候,其他三条腿就得稳稳地撑住地面。
这就要求机器人的身体能够自动调整重心。
比如说,左边的腿抬起来了,那机器人的身体就会稍微往右边倾斜一点,把重心移到右边的三条腿上。
这就像是我们单脚站立的时候,身体会不自觉地往另一条腿那边歪一点,这样才能站得稳。
而且哦,这个四足蜘蛛机器人的腿上还有传感器呢。
这些传感器就像是小侦察兵一样。
它们能感觉到地面的情况。
要是地面是平的呢,腿就可以按照正常的模式走。
但要是地面有个小坑或者小凸起,传感器就会把这个消息告诉机器人的“大脑”,然后大脑就会指挥腿做出调整。
比如说,要是有个小坑,腿可能就会伸得长一点,跨过去这个坑。
要是有个凸起,腿就会抬得更高一点,避免被绊倒。
四足机器人运动学分析及步态研究四足机器人是一种模仿动物四足步态的机器人,它在军事、医疗、救援等领域具有重要的应用前景。
这种机器人能够在不平坦的地面上行走,具有良好的适应性和稳定性。
因此,对四足机器人运动学分析和步态研究具有重要的意义。
对于四足机器人的位姿解析,主要是通过一系列传感器获取机器人的姿态参数,如位置、方向和速度等,并通过数学模型将这些参数转化为机器人的位姿信息。
位姿解析的主要目的是得到机器人在三维空间中的运动状态和位置。
关节解析是指对机器人的关节进行解析和研究。
关节解析是通过分析机器人关节的运动规律和关节空间中的位置关系,确定机器人各个关节的位置和姿态。
关节解析的主要目的是为机器人控制系统提供关节控制的基础数据。
末端执行器控制是指对机器人末端执行器进行控制的过程。
末端执行器控制是依据机器人的运动学参数和控制算法,控制机器人的末端执行器的位置和姿态。
末端执行器控制通常包括位置控制和力控制两种方式,通过调节控制信号,使机器人达到预定的位置和力矩要求。
步态研究是对四足机器人行走步态进行研究和优化的过程。
步态是机器人运动的基本形式,确定合适的步态对于机器人的运动和稳定性非常重要。
步态研究主要包括步态规划、步态分析和步态优化等内容。
步态规划是指确定四足机器人行走的步长、步高和步频等参数的过程。
步态规划的目的是通过合理的参数选择,使机器人能够在不同的地形上行走,具有稳定的步态和良好的适应性。
步态分析是对机器人步态进行分析和评估的过程。
通过分析机器人行走时的关节角度、应力分布和能量消耗等参数,评估机器人行走的稳定性和效率,并对步态进行优化。
步态优化是对机器人步态进行优化和改进的过程。
通过对步态参数和控制算法的调整,进一步提高机器人的行走性能和适应能力。
步态优化的目标是使机器人能够在各种复杂环境下行走,具有更好的平衡能力和敏捷性。
综上所述,四足机器人的运动学分析和步态研究是实现其稳定行走和适应不同环境的关键技术。
机器人正反解方法概述引言 机器人运动学是机器人学的基础,是描述机器人运动过程中,各个关节及末端执行器的变化情况。
它涉及到两个方面的内容:即机器人正运动学和逆运动学。
机器人正运动学是已知机器人的连杆参数和各个关节变量,求解机器人末端执行器的位置和姿态;而机器人逆运动学恰好相反,是已知其末端执行器的位置和姿态,求解机器人的各个关节变量。
因此,求解机器人位置正反解的方法成为机器人设计中重要的内容。
机器人逆运动学比正运动学问题复杂得多,并且随着机器人自由度的增加,对于逆运动学问题的求解会越来越复杂。
由于机器人逆解的准确性以及求解速度的快慢会直接影响机器人的实时控制,因此国内外研究机器人逆解的求解算法比较多。
自有机器人以来,国内外的专家学者对此也进行了孜孜不倦的探索,目前已经有大量专门的或者通用的位置正反解求解方法问世,如求解正解问题的广泛应用的D-H(Denavit 和Harenberg)分析方法.求解反解的方法大致分为解析法和数值法.具体除了Paul 等人提出的反变换法,Lee 和Ziegler 提出的几何法和Pieper 解法等,还有旋量理论法,神经网络方法和CAD /CAE 集成软件仿真图形分析法等.本文的宗旨就是对这些方法进行概述,简要介绍各种方法的基本原理及内容以及他们适用的范围和优缺点.一. 位置正解求解方法机器人是由多个关节组成的, 各关节之间的相对平移和旋转齐次变换可以用矩阵 A 表如果用 A1表示第 1个连杆在基系的位置和姿态矩阵, A2表示第 2个连杆相对第 1个连杆的位置和姿态矩阵, 根据坐标系位姿相对变换规则, 第 2个连杆相对基系的位置和姿[ 1]:T2= A1A2依此类推, 则可以得出第 n 个连杆相对基系的位置和姿态矩阵:Tn= A1A2A3A4A5A6An 以著名的斯坦福机器人为例[ 3], 该机器人手臂有6 个关节和 6个杆件, 首先建立各关节坐标系之间的齐次变换矩阵 An, 根据运动学方程式计算规则得T6= A1A2A3A4A5A6= [nx Ox ny Oy ax Pxay Py nz Oz 00az Pz01] 其中:{nx= c1[ c2( c4c5c6- s4s6) - s2s5c6] - s1( s4c5c6+ c4s6)ny= s1[ c2( c4c5c6- s4s6) - s2s5c6] - c1( s4c5c6+ c4s6)nz= - s2( c4c5c6- s4s6) - c2s5c6此种方法适应范围广泛,也得到了实践的验证,正确率高,因此得到了较高的应用,是通用的正解求解方法。
四足机器人动态行走控制方法研究四足机器人是一种模仿动物步态的机器人,它通过四条腿来实现行走、奔跑等动作。
目前,四足机器人的动态行走控制方法研究正日益受到关注,因为它可以提高机器人的稳定性和适应性,并使其能够在复杂的环境中进行高效的移动。
本文将对四足机器人动态行走控制方法进行研究。
首先,四足机器人的动态行走控制方法可以分为两个方面:步态生成和运动控制。
步态生成是指确定机器人每个时间步的腿部运动模式。
通常,可以使用开环或闭环控制方法进行步态生成。
开环控制方法是一种基于预设模式的步态生成方法。
它利用预先定义的步态进行腿部运动的规划和控制。
闭环控制方法则是基于传感器反馈信息的步态生成方法。
它使用传感器获取机器人当前状态,并根据反馈信息动态调整步态。
闭环控制方法通常具有更好的适应性和鲁棒性,因为它可以根据环境变化实时调整步态。
在步态生成的基础上,需要进行运动控制来实现机器人的动态行走。
运动控制包括姿态控制和轨迹跟踪两个方面。
姿态控制是指控制机器人的身体姿态,以保持平衡和稳定。
通常,可以使用反馈线性化控制或模型预测控制等方法进行姿态控制。
反馈线性化控制使用反馈线性化技术将非线性动力学系统转化为线性系统,从而实现姿态控制。
模型预测控制利用数学模型进行状态预测,并根据预测结果进行姿态控制。
轨迹跟踪是指控制机器人的关节运动,以实现期望的步态。
这可以通过逆运动学或优化等方法实现。
此外,四足机器人动态行走控制方法还需要考虑环境感知和路径规划。
环境感知可以通过各种传感器,如摄像头、激光雷达等来实现。
路径规划则是确定机器人的运动轨迹,以实现特定的任务,如避障、跟踪等。
路径规划可以使用启发式算法、图算法等方法进行。
在研究四足机器人动态行走控制方法时,还面临一些挑战。
首先,动态行走控制需要考虑机器人的平衡和稳定性,这是一种复杂的非线性控制问题。
其次,四足机器人的运动涉及多个自由度的关节控制,需要考虑多个约束条件。
此外,四足机器人需要根据环境变化做出实时的决策,这对控制方法的实时性提出了要求。
四足步行机器人的结构及运动仿真分析目录1. 内容简述 (2)1.1 研究背景 (2)1.2 研究目的 (3)1.3 研究意义 (4)2. 四足步行机器人概述 (5)2.1 四足步行机器人的发展历程 (6)2.2 四足步行机器人的结构组成 (7)2.3 四足步行机器人的运动学模型 (8)3. 四足步行机器人运动仿真分析方法 (10)3.1 基于MATLAB/Simulink的仿真分析 (11)3.2 基于ANSYS的仿真分析 (13)4. 四足步行机器人结构设计与优化 (14)4.1 腿部结构设计优化 (15)4.1.1 腿部关节设计 (16)4.1.2 腿部驱动器设计 (19)4.1.3 腿部传感器设计 (20)4.2 身体结构设计与优化 (22)4.2.1 身体主体结构设计 (24)4.2.2 身体重心设计优化 (25)4.2.3 身体姿态稳定控制设计 (27)5. 四足步行机器人运动仿真实验与结果分析 (27)5.1 仿真环境搭建 (29)5.2 仿真模型构建与参数设置 (30)5.3 仿真结果分析与验证 (31)6. 结论与展望 (32)6.1 主要研究成果总结 (33)6.2 进一步研究方向与展望 (34)1. 内容简述本文档主要针对四足步行机器人的结构设计及运动仿真分析进行研究。
深入分析不同类型四足机器人的结构特点,包括骨骼结构、驱动机构、传动系统等,并详细阐述常见驱动模式如悬链和扭转驱动等原理及优缺点,为选择合适的结构方案提供理论基础。
利用仿真软件对设计出的四足步行机器人进行运动建模和仿真分析,包括生成机器人动力学模型、设定运动参数和环境条件,并观察其行走姿态、步态、稳定性等关键性能指标。
通过对仿真结果的分析和评价,可以优化机器人结构参数和运动控制策略,提高其步行性能和适应能力。
本研究旨在为四足步行机器人的设计与发展提供理论和技术参考,具有重要的理论意义和应用价值。
1.1 研究背景随着科技的飞速发展,机器人技术已经逐渐渗透到我们生活的方方面面,尤其在工业生产、家庭服务、医疗康复等领域展现出了巨大的应用潜力。
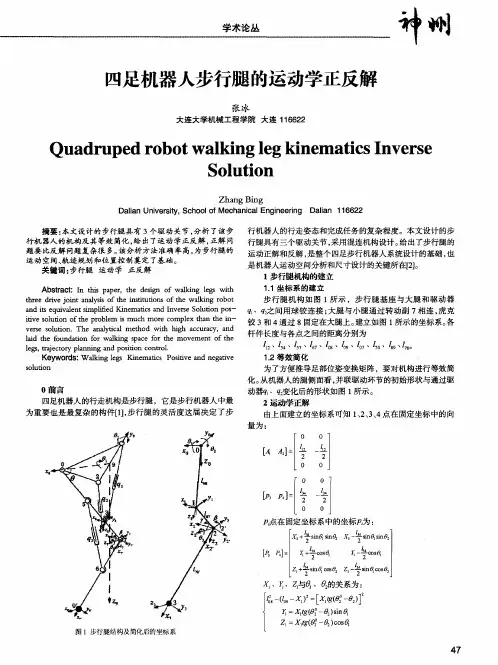
四足机器人步行腿的运动学正反解摘要:本文设计的步行腿具有3个驱动关节,分析了该步行机器人的机构及其等效简化,给出了运动学正反解,正解问题要比反解问题复杂很多。
该分析方法准确率高,为步行腿的运动空间、轨迹规划和位置控制奠定了基础。
关键词:步行腿运动学正反解
abstract: in this paper, the design of walking legs with three drive joint analysis of the institutions of the walking robot and its equivalent simplified kinematics and inverse solution positive solution of the problem is much more complex than the inverse solution. the analytical method with high accuracy, and laid the foundation for walking space for the movement of the legs, trajectory planning and position control.
keywords: walking legs kinematics positive and negative solution
0 前言
四足机器人的行走机构是步行腿,它是步行机器人中最为重要也是最复杂的构件[1],步行腿的灵活度这届决定了步行机器人的行走姿态和完成任务的复杂程度。
本文设计的步行腿具有三个驱动关节,采用混连机构设计。
给出了步行腿的运动正解和反解,是整个四足步行机器人系统设计的基础,也是机器人运动空间分析和尺
寸设计的关键所在[2]。
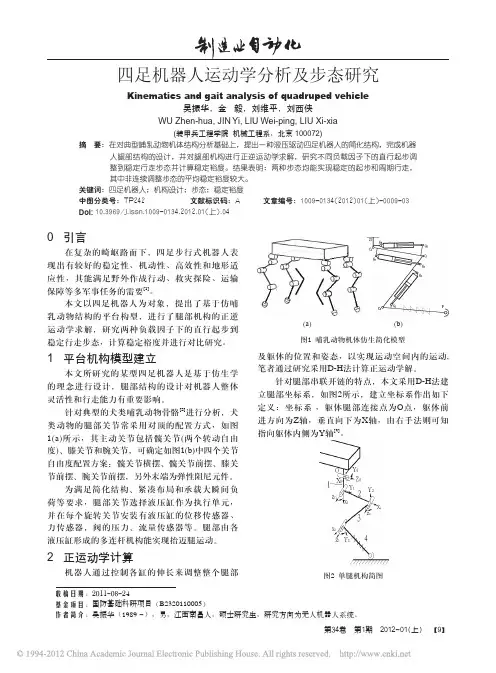
1 步行腿机构的建立
1.1 坐标系的建立
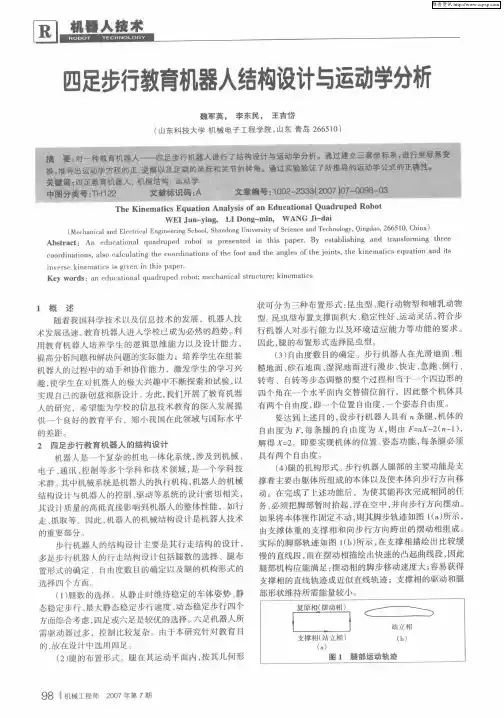
步行腿机构如图1所示,步行腿基座与大腿和驱动器■之间用球铰连接;大腿与小腿通过转动副7相连,虎克铰3和4通过8固定在大腿上。
建立如图1所示的坐标系。
各杆件长度与各点之间的距离分别为
■。
1.2 等效简化
为了方便推导足部位姿变换矩阵,要对机构进行等效简化。
从机器人的腿侧面看,并联驱动环节的初始形状与通过驱动器■变化后的形状如图1所示。
2 运动学正解
由上面建立的坐标系可知1、2、3、4点在固定坐标中的向量为:■
■点在固定坐标系中的坐标■为:
■
■与■的关系为:
■
联立上述两式,可得,
■
综上所述,得到其运动学正解方程为:
■
根据关节变量的值,就可以求出最后的位置坐标。
3 运动学反解
如图1所示,■和■之间的关系为:
■
将上式后两项相除,前两项求平方和可求得■:
■
为方便计算,令
■。
综合以上各式,可得出弹性驱动关节变量值的现行方程组为:■
通过求解该线性方程组,可以求出关节变量■的数值。
4 结论
通过建立四足机器人步行腿的位置坐标,给出了正反解的求解公式。
虽然求解公式略显复杂,却是现有条件下最精确的求解方法[3]。
参考文献
[1] 马东兴.四足机器人步态规划与仿真[d].南京航空航天大
学硕士论文,2010
[2] 张文宇.四足机器人斜面全方位静态步行及稳定性分析[d].中国海洋大学硕士论
文.2009
[3] 陈学东,孙翎,贾文川.多足步行机器人运动规划与控制[m].武昌,华中科技大学出版社,2006:1-71
作者简介:张冰,男,1989年出生,本科生,主要研究方向为机械原理。