第3章 神经网络控制- 网络结构3
- 格式:pdf
- 大小:1.58 MB
- 文档页数:76
- 22 -高 新 技 术从本质上来看,PID 控制算法就是对比例、积分和比例微分间的关系进行控制的一种算法。
PID 控制调节器具有适应性强、鲁棒性良好的特征,因此被广泛应用于工业控制领域。
但是,随着科学技术、控制理论发展,在工业生产中被控对象逐渐向复杂化和抽象化的趋势发展,并呈现滞后性、时变性和非线性的特征,这使传统PID 控制器难以精准调控这种较复杂的控制系统。
为了解决该问题,研究人员将控制理论与其他先进的算法相结合,形成全新的控制理论,包括神经网络控制、遗传算法以及模糊控制等。
对神经网络算法来说,由于其具有较高的鲁棒性和容错性,因此适用于复杂的非线性控制系统中,并且具有广阔的应用前景和较大的发展潜力。
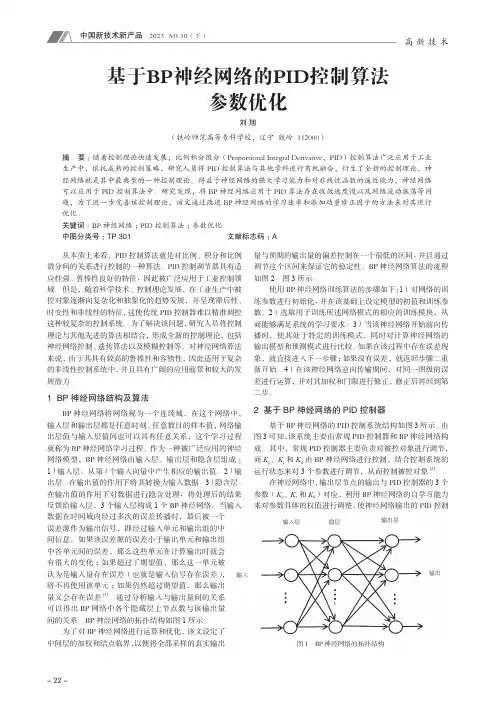
1 BP 神经网络结构及算法BP 神经网络将网络视为一个连续域,在这个网络中,输入层和输出层都是任意时刻、任意数目的样本值,网络输出层值与输入层值间也可以具有任意关系,这个学习过程就称为BP 神经网络学习过程。
作为一种被广泛应用的神经网络模型,BP 神经网络由输入层、输出层和隐含层组成:1) 输入层。
从第i 个输入向量中产生相应的输出值。
2) 输出层。
在输出值的作用下将其转换为输入数据。
3) 隐含层。
在输出值的作用下对数据进行隐含处理,将处理后的结果反馈给输入层,3个输入层构成1个BP 神经网络。
当输入数据在时间域内经过多次的误差传播时,最后被一个误差源作为输出信号,即经过输入单元和输出组的中间信息。
如果该误差源的误差小于输出单元和输出组中各单元间的误差,那么这些单元在计算输出时就会有很大的变化;如果超过了期望值,那么这一单元被认为是输入量存在误差(也就是输入信号存在误差),将不再使用该单元;如果仍然超过期望值,那么输出量又会存在误差[1]。
通过分析输入与输出量间的关系可以得出BP 网络中各个隐藏层上节点数与该输出量间的关系。
BP 神经网络的拓扑结构如图1所示。
为了对BP 神经网络进行运算和优化,该文设定了中间层的加权和结点临界,以便将全部采样的真实输出量与预期的输出量的偏差控制在一个很低的区间,并且通过调节这个区间来保证它的稳定性。
基于MATLAB的智能PID控制器设计与仿真摘要在工业生产中应用非常广泛的是PID控制器,是最早在经典控制理论基础上发展起来的控制方法,应用也十分广泛。
传统的PID控制器原理十分简单,即按比例、积分、微分分别控制的控制器,但是他的核心也是他的难点就是三个参数(比例系数Kp、积分系数Ki、微分系数Kd)的整定。
参数整定的合适,那么该控制器将凭借结构简单、鲁棒性好的优点出色的完成控制任务,反之则达不到人们所期望的控制效果。
人工神经网络模拟人脑的结构和功能而形成的信息处理系统,是一门十分前沿高度综合的交叉学科,并广泛应用于工程领域。
神经网络控制是把自动控制理论同他模仿人脑工作机制的数学模型结合起来,并拥有自学习能力,能够从输入—输出数据中总结规律,智能的处理数据。
该技术目前被广泛应用于处理时变、非线性复杂的系统,并卓有成效。
关键词自适应PID控制算法,PID控制器,神经网络Design and simulation of Intelligent PID Controllerbased on MATLABAbstractPID controller ,the control method which is developed on the basis of classical control theory, is widely used in industrial production.The Principle of traditional PID controller is very simple, which contains of the proportion, integral, differential three component, but its core task and difficulties is three parameter tuning(proportional coefficient Kp, integral coefficient Ki and differential coefficient KD).If the parameter setting is suitable, the controller can accomplish the control task with the advantages of simple structure and good robustness;but on the contrary, it can not reach the desired control effect which we what.Artificial neural network , the formation of the information processing system which simulate the structure and function of the human brain , is a very high degree of integration of the intersection of disciplines, and widely used in the field of engineering. Neural network control ,combining automatic control theory and the imitate mathematical model of the working mechanism of human brain , has self-learning ability, and can summarize the law of the input-output data , dealing with data intelligently .This technique has been widely used in the process of time-varying, nonlinear and complex system, and it is very effective.Key W ord:Adaptive PID control algorithm,PID controller,Neural network目录摘要 (I)Abstract (II)第一章绪论 (1)1.1 课题研究背景及意义 (1)第二章 PID控制器 (2)2.1 PID控制原理 (2)2.2常规PID控制器的算法理论 (3)2.2.1 模拟PI D控制器 (3)2.2.2 数字P I D控制算法 (3)2.2.3常规PID控制的局限 (5)2.2.4 改进型PID控制器 (5)第三章人工神经网络 (8)3.1 人工神经网络的原理 (8)3.2神经网络PID控制器 (8)3.2.1神经元PID控制器 (8)3.2.2 单神经元自适PID应控制器 (9)3.3 BP神经网络参数自学习的PID控制器 (12)第四章MATAB仿真 (16)4.1 仿真过程 (16)第五章结论与展望 (24)致谢 (25)参考文献 (25)华东交通大学毕业设计(论文)第一章绪论1.1 课题研究背景及意义在工业生产中应用非常广泛的是PID控制器,是最早在经典控制理论基础上发展起来的控制方法,应用也十分广泛。
神经网络模型预测控制器摘要:本文将神经网络控制器应用于受限非线性系统的优化模型预测控制中,控制规则用一个神经网络函数逼近器来表示,该网络是通过最小化一个与控制相关的代价函数来训练的。
本文提出的方法可以用于构造任意结构的控制器,如减速优化控制器和分散控制器。
关键字:模型预测控制、神经网络、非线性控制1.介绍由于非线性控制问题的复杂性,通常用逼近方法来获得近似解。
在本文中,提出了一种广泛应用的方法即模型预测控制(MPC),这可用于解决在线优化问题,另一种方法是函数逼近器,如人工神经网络,这可用于离线的优化控制规则。
在模型预测控制中,控制信号取决于在每个采样时刻时的想要在线最小化的代价函数,它已经广泛地应用于受限的多变量系统和非线性过程等工业控制中[3,11,22]。
MPC方法一个潜在的弱点是优化问题必须能严格地按要求推算,尤其是在非线性系统中。
模型预测控制已经广泛地应用于线性MPC问题中[5],但为了减小在线计算时的计算量,该部分的计算为离线。
一个非常强大的函数逼近器为神经网络,它能很好地用于表示非线性模型或控制器,如文献[4,13,14]。
基于模型跟踪控制的方法已经普遍地应用在神经网络控制,这种方法的一个局限性是它不适合于不稳定地逆系统,基此本文研究了基于优化控制技术的方法。
许多基于神经网络的方法已经提出了应用在优化控制问题方面,该优化控制的目标是最小化一个与控制相关的代价函数。
一个方法是用一个神经网络来逼近与优化控制问题相关联的动态程式方程的解[6]。
一个更直接地方法是模仿MPC方法,用通过最小化预测代价函数来训练神经网络控制器。
为了达到精确的MPC技术,用神经网络来逼近模型预测控制策略,且通过离线计算[1,7.9,19]。
用一个交替且更直接的方法即直接最小化代价函数训练网络控制器代替通过训练一个神经网络来逼近一个优化模型预测控制策略。
这种方法目前已有许多版本,Parisini[20]和Zoppoli[24]等人研究了随机优化控制问题,其中控制器作为神经网络逼近器的输入输出的一个函数。

![神经网络自校正控制_智能控制简明教程_[共2页]](https://uimg.taocdn.com/45ef46122cc58bd63086bd5b.webp)
第5章 神经网络控制
129
图5.2 神经网络间接自校正控制结构
3.神经网络参考模型自适应控制
图5.3给出了神经网络直接参考模型自适应控制结构和神经网络间接参考模型自适应控制结构。
图5.3 神经网络参考模型自适应控制
在图 5.3(a )所示的神经网络直接参考模型自适应控制系统中,神经网络控制器NNC 的权值修正目标是使误差0m e y y =−→;在图5.3(b )所示的神经网络间接参考模型自适应控制系统中,引入神经网络辨识器NNI ,离线辨识未知的被控对象,建立正向模型,为神经网络控制器NNC 提供学习信息。
4.神经网络内模控制
图5.4给出一种神经网络内模控制系统结构,神经网络控制器NNC 实现被控对象的逆模
控制,神经网络辨识器NNI 实现被控对象的正向建模,滤波器用来提高控制系统的鲁棒性。
图5.4 神经网络内模控制系统结构
5.2 神经网络自校正控制
利用神经网络的非线性函数映射能力,可以使它在自校正控制系统中充当未知系统函数逼近器。
考虑一个单输入、单输出的非线性系统:。
目录摘要 (1)Abstrac (1)1. 绪论 (3)1.1神经网络概述 (3)2.神经网络的提出与发展 (4)2.1 神经网络的定义 (4)2.1神经网络的发展历程 (5)2.1.1初始发展阶段 (5)2.1.2低潮时期 (6)2.1.3复兴时期 (6)2.1.4 二十世纪80年后期以来的热潮 (7)2.3神经网络研究的意义 (7)3.神经网络的原理 (9)3.1 神经网络的基本原理 (9)3.2人工神经元模型 (10)3.3神经网络的特点 (11)3.4神经网络的分类 (11)4 卷积神经网络 (12)4.1 卷积神经网络结构 (12)4.2 神经元模型 (14)4.3 卷积网络的训练过程 (16)5. 深度学习的发展与应用 (19)5.1深度学习发展 (19)5.2深度学习的应用 (20)5.2.1深度学习在语音识别领域研究现状 (20)5.2.2深度学习在计算机视觉领域研究现状 (20)5.2.3深度学习在自然语言处理领域研究现状 (21)5.2.4深度学习在图像识别领域研究现状 (21)5.2.5深度学习在信息检索领域研究现状 (22)总结 (23)参考文献 (24)摘要神经网络作为一门新兴的信息处理科学,是对人脑若干基本特性的抽象和模拟。
它是以人的人脑工作模式为基础,研究白适应及非程序的信息处理方法。
这种工作机制的特点表现为通过网络中人量神经元的作用来体现它白身的处理功能,从模拟人脑的结构和单个神经元功能出发,达到模拟人脑处理信息的日的。
目前,在国民经济和国防科技现代化建设中神经网络具有广阔的应用领域和发展前景,其应用领域主要表现在信息领域、自动化领域、程领域和经济领域等。
不可否认的是,虽然它具有广泛的应有领域,同时自身也存在着许多缺点,从而成为当今人们一直研究的热点问题。
深度学习是一个复杂的机器学习算法,在语音和图像识别方面取得的效果,远远超过先前相关技术。
它在搜索技术,数据挖掘,机器学习,机器翻译,自然语言处理,多媒体学习,语音,推荐和个性化技术,以及其他相关领域都取得了很多成果。